Как устроена телеметрическая система для турбореактивных двигателей
Как прокачать сцепление на пикапе Ford Ranger Удаление воздуха из муфты правильно удаляет весь воздух из линии сцепления. Вы хотите удалить воздух через главный цилиндр… Подробнее » Как устроено сцепление на форд рейнджер
Как устроена телеметрическая система для турбореактивных двигателей
- автор: admin
- 12.11.2022
Двухконтурный турбореактивный двигатель (ТРДД и ТРДДФ). В сегодняшней небольшой статье продолжаем более конкретное знакомство с типами авиационных двигателей. Двухконтурный турбореактивный двигатель ( ТРДД ) уже… Подробнее » Как устроена телеметрическая система для турбореактивных двигателей
Как установить помпу
- автор: admin
- 12.11.2022
Как выбрать и правильно установить помпу для аквариума? Рыбки и другие аквариумные обитатели вместе с растениями — это не только красота и разнообразие. Это ещё… Подробнее » Как установить помпу
Как установить птф на форд фокус 3
- автор: admin
- 12.11.2022
Установка противотуманных фар. ПТФ. Focus 3. Началось всё с того, что предыдущий хозяин продал мне автомобиль с уже установленными противотуманными фарами. Тогда я особо не… Подробнее » Как установить птф на форд фокус 3
Как установить регистратор
- автор: admin
- 12.11.2022
Как установить видеорегистратор: установка регистратора своими руками Решение поставить видеорегистратор в автомобиль позволяет водителю постоянно фиксировать дорожную обстановку. Регистратор в машине является электронным «свидетелем», что… Подробнее » Как установить регистратор
Способ и система контроля турбореактивного двигателя
Изобретение относится к способу и системе контроля турбореактивного двигателя. Способ состоит в том, что получают (Е10) сигнал, характерный для вибрационного уровня ротора во время работы турбореактивного двигателя, получают (Е20) режим вращения ротора во время работы, сравнивают (Е40) амплитуду сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора и в случае превышения порога пиком амплитуды анализируют (Е50) сигнал во временном окне, образованном вокруг пика амплитуды, чтобы определить (Е60), является ли явление, ставшее причиной пика амплитуды, механическим ударом по ротору турбореактивного двигателя или электронным возмущением сигнала. Технический результат — надежное обнаружение повреждений, даже если они не приводят к появлению дисбаланса на одном из роторов турбореактивного двигателя или к деформации лопаток вентилятора. 9 з.п. ф-лы, 8 ил.
Предшествующий уровень техники
Настоящее изобретение относится к общей области контроля турбореактивного двигателя. В частности, оно касается способа и системы, позволяющих автоматически обнаруживать попадание постороннего предмета в турбореактивный двигатель самолета во время полета.
Во время полета в турбореактивный двигатель могут попадать посторонние предметы или детали, отделившиеся от турбореактивного двигателя, которые могут привести к повреждениям внутри этого двигателя. В частности, столкновение предмета с лопаткой вентилятора может привести к ее повреждению. В случае повреждений, связанных с попаданием посторонних предметов в турбореактивный двигатель (например, птиц), говорят о повреждениях FOD (от “Foreign Object Damage”). В случае повреждений, связанных с попаданием отделившихся деталей турбореактивного двигателя (например, заклепок, болтов и т.д.), говорят о повреждениях DOD (от “Domestic Object Damage”).
Известны различные решения для обнаружения повреждений FOD или DOD. Одно из этих решений основано на измерении вибраций одного из роторов турбореактивного двигателя для обнаружения появления дисбаланса в результате его повреждения при попадании предмета. В случае обнаружения дисбаланса осуществляют визуальный осмотр турбореактивного двигателя на земле (например, при помощи эндоскопии): присутствие следов удара, перьев птиц или выемок на лопатках в месте удара позволяет, таким образом, диагностировать наличие повреждений FOD или DOD.
Однако такое решение имеет целый ряд недостатков. В частности, оно не позволяет обнаруживать наличие повреждений FOD или DOD, которые не приводят к дисбалансу на роторах турбореактивного двигателя (или приводят к слишком незначительному дисбалансу, чтобы его можно было обнаружить). Кроме того, визуальный осмотр турбореактивного двигателя требует вмешательства на земле, которое необходимо планировать заранее и которое может оказаться затратным по времени.
Другое известное решение состоит в использовании измерительных инструментов, установленных на борту самолета (таких как радары), для обнаружений повреждений FOD или DOD. Недостатком этого решения является необходимость установки дополнительных инструментов, которая по сравнению с получаемым выигрышем является дорогой и приводит к увеличению массы самолета.
Из документа US 2007/0250245 известен также способ контроля турбореактивного двигателя, позволяющий практически моментально обнаруживать повреждение турбореактивного двигателя в результате попадания в него постороннего предмета. Для этого, согласно указанному способу, в режиме реального времени сравнивают вибрационный уровень ротора турбореактивного двигателя с заранее определенным порогом. В случае превышения этого порога в течение заранее определенного времени подается тревожный сигнал о необходимости проведения обслуживания.
Однако этот способ имеет несколько недостатков. В частности, он ограничен обнаружением повреждений FOD или DOD, которые, по меньшей мере, временно привели к деформации лопатки вентилятора (способ обрабатывает только ограниченные вибрационные данные). Таким образом, способ не позволяет обнаружить простой удар при попадании постороннего тела без деформации (временной или окончательной) лопатки вентилятора. Кроме того, для выдачи тревожного сигнала о необходимости обслуживания необходимо, чтобы превышение порога произошло за минимальное время. Поэтому существует риск того, что некоторые повреждения FOD или DOD не будут обнаружены при помощи этого способа. Наконец, способ не предусматривает возможности предотвращения ложных тревог путем устранения электронных помех сигнала.
Из документа US 6,907,368 известен также способ обнаружения попадания отделившихся деталей (DOD) путем анализа, при помощи преобразования Фурье, сигнала, характерного для шума турбореактивного двигателя во время работы. Несмотря на свою эффективность при обнаружении повреждений DOD, этот способ имеет тот недостаток, что не позволяет избежать ложных тревог, вызванных возмущениями, причиной которых не является попадание в двигатель отделившихся деталей.
Объект и сущность изобретения
Таким образом, настоящее изобретение призвано устранить такие недостатки и предложить надежное автоматическое обнаружение повреждений FOD или DOD, даже если они не приводят к появлению дисбаланса на одном из роторов турбореактивного двигателя или к деформации лопатки вентилятора.
В связи с этим объектом настоящего изобретения является способ контроля турбореактивного двигателя, состоящий в том, что:
получают сигнал, характерный для вибрационного уровня ротора во время работы турбореактивного двигателя;
получают режим вращения ротора во время работы;
сравнивают амплитуду сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора; и
в случае превышения порога пиком амплитуды анализируют сигнал во временном окне, образованном вокруг пика амплитуды, чтобы определить, является ли явление, ставшее причиной пика амплитуды, механическим ударом, которому подвергся ротор турбореактивного двигателя или электронное возмущение сигнала.
Способ в соответствии с настоящим изобретением содержит этап анализа сигнала после обнаружения превышения вибрационного порога пиком амплитуды. Целью этого этапа является определение того, что явлением, вызвавшим пик амплитуды, является именно механический удар, которому подвергся ротор турбореактивного двигателя, а не простое электронное возмущение сигнала. Таким образом, можно устранить любую ложную тревогу.
Кроме того, способ в соответствии с настоящим изобретением позволяет производить обнаружение самых разных явлений, приводящих к пику амплитуды: таким образом, не обязательно, чтобы предмет, попавший в турбореактивный двигатель, вызывал дисбаланс или приводил к деформации (даже временной) лопатки вентилятора, чтобы его можно было обнаружить.
В целом способ в соответствии с настоящим изобретением обеспечивает передачу сообщения обслуживания для предписания визуального осмотра реальных повреждений, вызванных попаданием предмета в турбореактивный двигатель (например, в конце полета), не дожидаясь заранее запланированного технического осмотра. Таким образом, можно избежать долгосрочного ухудшения характеристик турбореактивного двигателя и максимально быстро устранить повреждения, появившиеся в результате попадания постороннего предмета.
Наконец, способ в соответствии с настоящим изобретением можно применять при помощи измерительных инструментов (в частности, акселерометров) или систем сбора данных (в частности, электронного вычислителя), уже присутствующих на большинстве самолетов или на самих турбореактивных двигателях.
Этап анализа сигнала во временном окне может содержать анализ симметрии сигнала. Альтернативно или в комбинации этап анализа сигнала во временном окне может также содержать моделирование ослабления сигнала после пика амплитуды. В этом втором случае этап анализа сигнала во временном окне состоит в вычислении отклонения между кривой среднего значения амплитуд спектрограммы сигнала во временном окне в каждый момент и его моделирование посредством экспоненциальной функции.
Предпочтительно заранее определенный порог содержит верхние и нижние значения сигнала в разных диапазонах режима вращения ротора.
Согласно предпочтительному отличительному признаку, способ дополнительно состоит, после определения механического удара, которому подвергся ротор турбореактивного двигателя, в определении появился ли дисбаланс на роторе в результате этого механического удара.
В этом случае этап определения появления дисбаланса на роторе может содержать выполнение спектрограммы сигнала во временном окне, вычисление среднего значения амплитуд спектрограммы в каждый момент, вычисление разности уровня среднего значения до и после пика амплитуды и сравнение разности уровня с заранее определенным порогом уровня.
Предпочтительно этапы получения сигнала и режима вращения ротора выполняют непрерывно во время рабочего цикла турбореактивного двигателя.
Предпочтительно этапы получения сигнала и режима вращения ротора и этап сравнения амплитуды сигнала выполняют в реальном времени, при этом этап анализа сигнала выполняют с запаздыванием.
Предпочтительно сообщение обслуживания передают, если было определено, что явлением, ставшим причиной пика амплитуды, является механический удар, которому подвергся ротор турбореактивного двигателя. Это сообщение обслуживания может быть передано во время полета бригадам обслуживания аэропорта назначения. Таким образом, визуальный осмотр после обнаружения механического удара может быть подготовлен заранее, чтобы оптимизировать время стоянки самолета на земле, необходимое для этого осмотра.
Объектом настоящего изобретения является также система контроля турбореактивного двигателя, содержащая средства получения сигнала, характерного для вибрационного уровня, и режима вращения ротора во время работы турбореактивного двигателя, средства сравнения амплитуды сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора и средства анализа сигнала во временном окне, активируемые в случае превышения порога пиком амплитуды, для определения, является ли явление, ставшее причиной пика амплитуды, механическим ударом, которому подвергся ротор турбореактивного двигателя, или электронным возмущением сигнала.
Объектом настоящего изобретения является также турбореактивный двигатель, содержащий вышеуказанную систему контроля.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 — блок-схема основных этапов способа в соответствии с настоящим изобретением.
Фиг.2, 3, 4А, 4Б, 5А, 5Б, 6А, 6Б, 7 и 8 — примеры применения способа в соответствии с настоящим изобретением.
Подробное описание варианта выполнения
Способ и система контроля в соответствии с настоящим изобретением позволяют автоматически обнаруживать попадание в турбореактивный двигатель самолета предмета (постороннего тела или детали, отделившейся от турбореактивного двигателя) во время полета.
Способ основан на анализе необработанных временных сигналов, поступающих от датчиков вибраций (типа акселерометров), как правило, установленных на турбореактивном двигателе для обеспечения традиционных функций вибрационного контроля.
Как известно, эти датчики вибраций позволяют измерять вибрационные уровни одного из роторов турбореактивного двигателя во время его работы. Для обработки сигнала они соединены с электронным вычислительным устройством (называемым также EMU от “Engine Monitoring Unit”), которое может присутствовать в самолете (например, в отсеке) или может быть установлено непосредственно на турбореактивном двигателе.
Как показано на фиг.1 способ контроля в соответствии с настоящим изобретением сначала состоит в получении в реальном времени во время полета сигнала, поступающего от датчиков вибраций (этап Е10), а также режима вращения ротора (этап Е20).
Под получением «в реальном времени сигнала, поступающего от датчиков вибрации», следует понимать, что сигналы, принятые датчиками, немедленно передаются в электронное вычислительное устройство турбореактивного двигателя во время полета для обработки, при этом все же может возникать небольшое смещение во времени между моментом появления вибраций и моментом, когда электронное вычислительное устройство преобразует эти сигналы с целью обработки.
Что касается получения режима вращения ротора во время полета (этап Е20), то оно состоит, например, в преобразовании сигнала тахометрического датчика, установленного на роторе (такой датчик может уже присутствовать на турбореактивном двигателе). В частности, это получение можно осуществлять на частоте дискретизации, намного меньшей, чем частота сигнала, поступающего от датчиков вибрации.
Полученные таким образом данные (сигнал от датчиков вибрации и режим вращения двигателя) временно сохраняют в памяти в непрерывном режиме в ходе полета (этап Е30).
Следующий этап (Е40) состоит в сравнении амплитуды сигнала, поступившего от датчиков вибрации, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора. Этот этап тоже осуществляют в режиме реального времени в ходе полета.
В случае превышения порога пиком амплитуды предусматривается, во время этапа Е50, анализ сигнала во временном окне, образованном вокруг пика амплитуды.
Этот этап анализа Е50 позволяет определить, что явлением, ставшим причиной пика амплитуды, является именно механический удар, которому подвергся ротор турбореактивного двигателя в результате попадания предмета, а не простое электронное возмущение сигнала (Е60).
В случае механического удара, которому подвергся ротор, сообщение обслуживания может быть передан (этап Е70), например, в бригаду наземного обслуживания, чтобы затребовать визуальный осмотр турбореактивного двигателя с целью оценки возможных повреждений турбореактивного двигателя. В случае простого электронного возмущения сигнала никаких действий не производится, и процесс продолжается.
Этапы анализа сигнала (Е50), определения причины пика амплитуды (Е60) и передачи сообщения обслуживания (Е70) предпочтительно осуществляют на уровне электронного вычислительного устройства EMU, которое содержит соответствующие средства обработки сигнала. Вместе с тем, эти этапы можно осуществлять на уровне наземного компьютера. В этом случае данные сигнала будут переданы на этот компьютер либо во время полета, либо по прилету самолета.
Кроме того, этап Е50 анализа сигнала выполняют с запаздыванием (в отличие от анализа в реальном времени). Предпочтительно его выполняют в любой момент во время полета до посадки самолета и параллельно с получением сигнала и режима вращения ротора и сравнением сигнала с заранее определенным вибрационным порогом.
Далее следует описание примера осуществления некоторых этапов способа контроля в соответствии с настоящим изобретением.
Так, на фиг.2 показан пример временного сигнала 10, характерного для вибрационного уровня ротора во время работы турбореактивного двигателя и поступающего от датчика вибраций. На этой фиг.2 показан сигнал после преобразования электронным вычислительным устройством EMU.
Сигнал 10 регистрируют в непрерывном режиме во время полета в скользящем временном окне 12, продолжительность которого составляет, например, порядка 10 секунд. Как известно, скользящее временное окно предназначено для «отслеживания» сигнала и его непрерывной записи в течение фиксированного периода по мере получения сигнала. Это скользящее окно сохраняется в памяти электронного вычислительного устройства EMU.
На фиг.2 показаны также две линии, характерные для верхнего значения Shaut и нижнего значения Sbas сигнала для конкретного режима вращения ротора.
Эти значения определяют заранее определенные пороги сигнала, которые соответствуют «нормальной» работе турбореактивного двигателя, то есть работе турбореактивного двигателя без попадания в него посторонних предметов. Оценку этих значений производят на основании вибрационных данных, снятых на одном или нескольких турбореактивных двигателях, принадлежащих к одному или нескольким разным классам, во время испытаний на земле или в воздухе. Предпочтительно эти значения получают на основании данных, регистрируемых в полете для одного и того же класса турбореактивных двигателей.
Как показано на фиг.3, максимальные значения Shaut и минимальные значения Sbas, определяющие пороги, зависят от режима вращения ротора турбореактивного двигателя. На этой фигуре эти значения определены в различных коротких диапазонах режима вращения ротора.
Во время этапа Е40 способа (фиг.1) амплитуду сигнала, зарегистрированного в скользящем временном окне, постоянно (то есть непрерывно) сравнивают с верхними и нижними значениями, определяющими заранее определенные пороги сигнала для рассматриваемого режима вращения ротора.
Этот этап сравнения, который осуществляют на уровне электронного вычислительного устройства EMU, позволяет обнаружить возможное превышение заранее определенных порогов пиком амплитуды сигнала. В случае, показанном на фиг.3, пик амплитуды сигнала, выходящий за пределы Shaut (в области положительных значений) или Sbas (в области отрицательных значения), должен быть немедленно обнаружен.
В случае превышения порога пиком амплитуды электронное вычислительное устройство EMU дает команду на сохранение в памяти одновременно временного окна, предшествующего выходу за пределы порога, и окна, следующего сразу за переходом порога. Так, как показано на фиг.4А и 4Б, временное окно 14, центрованное по пику амплитуды (соответственно 16 и 18), сохраняют в памяти (продолжительность этого окна составляет, например, приблизительно 20 секунд).
На фиг.4А и 4Б показаны два разных типа превышения порога: пик амплитуды на фиг.4А характеризует электронное возмущение сигнала (например, связанное с помехами от других электронных компонентов), тогда как пики амплитуды на фиг.4Б характеризуют попадание предмета в турбореактивный двигатель (постороннего предмета или детали, отделившейся от турбореактивного двигателя).
Описанный ниже этап анализа позволяет различать эти два типа событий.
Можно использовать (альтернативно или один за другим) два метода, чтобы отличить механический удар, которому подвергся ротор, от простого электронного возмущения сигнала (в этом случае говорят также “outlier” для аберрантного наблюдения). Эти методы применяют при помощи вычислительных средств электронного вычислительного устройства EMU.
Один из методов состоит в автоматическом исследовании симметрии пика амплитуды относительно оси симметрии наблюдаемого сигнала. Действительно, различные испытания позволили установить, что механический удар, которому подвергся ротор турбореактивного двигателя, как правило, приводит к, по существу, симметричному пику амплитуды, что далеко не всегда происходит при электронном возмущении сигнала.
Исследование симметрии пика амплитуды может, например, состоять в проверке соблюдения следующего условия:
где «М» является максимальным положительным значением, которое принимает пик амплитуды, «m» является минимальным отрицательным значением пика амплитуды, и «с» является параметром, заранее определенным конструктором двигателя.
Если вышеуказанное условие соблюдено, считают, что переход порога пиком амплитуды, вероятно, не связан с электронным возмущением сигнала.
Разумеется, можно предусмотреть оценку других условий, позволяющих автоматически определить, является пик амплитуды симметричным или нет.
Другой метод, позволяющий отличить механический удар, которому подвергся ротор, от простого электронного возмущения сигнала, состоит в определении наличия ослабления сигнала после пика амплитуды. Действительно, сигнал, характерный для механического удара, которому подвергся ротор, будет всегда содержать ослабление после пика амплитуды, тогда как электронное возмущение сигнала такого ослабления не показывает.
Для этого производят оценку моделирования понижения сигнала после пика амплитуды на основании спектрограммы сигнала, зарегистрированной во временном окне (на фигурах не показана). После этого вычисляют среднее значение амплитуд этой спектрограммы в каждый момент, что позволяет получить кривые 20, 22, показанные на фиг.5А и 5Б, соответственно для электронного возмущения сигнала и для механического удара, которому подвергся ротор.
Затем анализируют сходство между кривой Х (Х представляет собой кривую 20 или 22) и функцией экспоненциального типа, характеризующей ослабленный удар. Для этого, предположив, что при помощи убывающей экспоненциальной функции типа Y=A.e -t/τ можно произвести аппроксимацию кривой 20, 22, определяют коэффициенты «а» и «b», при которых прямая In(Y)=In(A)+(-1/τ)×t=a+b×t характеризует хорошую линейную аппроксимацию в направлении наименьших квадратов кривой In(X). На Фиг.6А и 6Б прямые 20′, 22′ соответствуют линейной аппроксимации в направлении наименьших квадратов соответственно для электронного возмущения сигнала и для механического удара, которому подвергся ротор.
Во время вычисления линейной аппроксимации при помощи метода наименьших квадратов коэффициент определения прямой регрессии является измерением сходства кривой Х с экспоненциальной кривой: минимальный порог на коэффициенте определения позволяет решить, является ли кривая Х достаточной близкой к экспоненциальной кривой, то есть в достаточной ли степени сигнал отображает механический удар.
Согласно предпочтительному отличительному признаку изобретения, после определения механического удара, которому подвергся ротор турбореактивного двигателя, способ дополнительно состоит в определении, появился ли на роторе дисбаланс в результате этого удара. Такой дисбаланс может быть связан с частичной или полной потерей одной или нескольких лопаток, столкнувшихся с попавшим внутрь предметом. Речь может также идти об образовании выемок на этих лопатках.
На фиг.7 показан временной сигнал 10, характерный для появления дисбаланса на роторе турбореактивного двигателя вследствие механического удара. Как видно из этой фигуры, форма сигнала 10′ после пика амплитуды 18 в результате механического удара по ротору отличается от формы сигнала 10 до пика амплитуды.
Например, метод автоматического определения появления дисбаланса состоит в выполнении спектрограммы вибрационного сигнала во временном окне, центрованном по пику амплитуды 18. После этого вычисляют среднее значение амплитуд этой спектрограммы в каждый момент, что позволяет получить кривую 24, показанную на фиг.8.
Среднее значение амплитуды точек кривой 24 (называемое также уровнем среднего значения) вычисляют после и до пика амплитуды 18. Эти средние значения дают две линии 26 и 28, показанные на фиг.8, соответственно для участка кривой до пика амплитуды и для участка кривой после пика амплитуды.
Разность 30 между этими двумя уровнями вычисляют и сравнивают с заранее определенным порогом уровня. Если разность выходит за пределы порога уровня, можно считать, что на роторе турбореактивного двигателя в результате механического удара появился дисбаланс, и эту информацию можно добавить в сообщение обслуживания, передаваемое для предупреждения о наличии повреждений FOD или DOD.
Как в случае вибрационного порога, порог уровня, используемый для определения появления дисбаланса, оценивают на основании вибрационных данных, снятых на одном или нескольких турбореактивных двигателях, принадлежащих к одному и тому же классу или к нескольким разным классам, во время испытаний, производимых на земле или в полете.
1. Способ контроля турбореактивного двигателя, состоящий в том, что:
получают (Е10) сигнал, характерный для вибрационного уровня ротора во время работы турбореактивного двигателя;
получают (Е20) режим вращения ротора во время работы;
сравнивают (Е40) амплитуду сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора; и
в случае превышения порога пиком амплитуды анализируют (Е50) сигнал во временном окне, образованном вокруг пика амплитуды, чтобы определить (Е60), является ли явление, ставшее причиной пика амплитуды, механическим ударом, которому подвергся ротор турбореактивного двигателя, или электронным возмущением сигнала.
2. Способ по п.1, в котором этап анализа сигнала во временном окне содержит анализ симметрии сигнала.
3. Способ по одному из пп.1 и 2, в котором этап анализа сигнала во временном окне содержит моделирование понижения сигнала после пика амплитуды.
4. Способ по п.3, в котором этап анализа сигнала во временном окне состоит в вычислении отклонения между кривой среднего значения амплитуд спектрограммы сигнала во временном окне в каждый момент и его моделирование посредством экспоненциальной функции.
5. Способ по п.1, в котором заранее определенный вибрационный порог содержит верхние и нижние значения сигнала в разных диапазонах режима вращения ротора.
6. Способ по п.1, дополнительно состоящий в том, что после определения механического удара, которому подвергся ротор турбореактивного двигателя, определяют, появился ли дисбаланс на роторе в результате этого механического удара.
7. Способ по п.6, в котором этап определения появления дисбаланса на роторе состоит в том, что:
выполняют спектрограмму сигнала во временном окне;
вычисляют среднее значение амплитуд спектрограммы в каждый момент;
вычисляют разность уровня среднего значения до и после пика амплитуды;
и сравнивают разность уровня с заранее определенным порогом уровня.
8. Способ по п.1, в котором этапы (Е10, Е20) получения сигнала и режима вращения ротора выполняют непрерывно во время рабочего цикла турбореактивного двигателя.
9. Способ по п.1, в котором этапы (Е10, Е20) получения сигнала и режима вращения ротора и этап (Е40) сравнения амплитуды сигнала выполняют в реальном времени, при этом этап (Е50) анализа сигнала выполняют с запаздыванием.
10. Способ по п.1, в котором сообщение обслуживания передают (Е70), если было определено, что явлением, ставшим причиной вибрационного события, является механический удар, которому подвергся ротор турбореактивного двигателя.
Как работает турбореактивный двигатель
Приветствую, ХАБРчане. Пришла мне в голову идея создать турбореактивный мотоцикл. И, естественно, пришлось собирать техническую информацию и во всём разбираться. Но простого объяснения принципа работы такого двигателя я не нашёл. Везде рассказывается сложным техническим языком, зачастую понятным только инженеру. И я решил попробовать рассказать по-простому так, чтобы понял и инженер, и ребёнок.
Физический принцип
Чтобы объяснить, на каком принципе работает турбореактивный двигатель, рассмотрим следующий пример.
Давайте представим, что мы взяли обычный домашний вентилятор. Включив его в розетку, мы увидим, что электрический двигатель будет раскручивать крыльчатку вентилятора и она начнёт создавать тот самый поток воздуха, который мы так любим в сильную жару. А теперь давайте поставим второй вентилятор напротив первого.

Тогда поток ветра с первого вентилятора будет вращать крыльчатку второго (не подключённого к сети) вентилятора, и если на второй вентилятор вместо двигателя мы установим электрогенератор, то он, разумеется, будет вырабатывать электричество. Получится как бы ветряной генератор. И тут сама собой напрашивается идея соединить эти два вентилятора проводами, то есть запитать первый вентилятор от генератора. Получится так называемая замкнутая система. Генератор вырабатывает электричество для двигателя, а двигатель вырабатывает ветер для генератора.
Замкнутая система
Получается, как бы вечный двигатель. Но сразу спешу огорчить, что вечного двигателя на самом деле не получится, так как и у крыльчаток, и у двигателя, и у генератора есть какой‑то свой коэффициент полезного действия (КПД). И, к сожалению, он почти всегда меньше единицы, ибо в этой замкнутой системе много потерь. В итоге эта связь двух вентиляторов будет иметь затухающий характер. Но люди придумали следующее: они расположили между этими двумя вентиляторами огонь.
Поскольку при сжигании керосина происходит расширение газов примерно в 27 раз, к тому же эти выхлопные газы будут изрядно разогреты, а значит дополнительно увеличены в объёме, то на второй вентилятор будет приходить намного больше энергии, чем тратит первый вентилятор.

И в таком случае мы действительно можем соединить оба вентилятора проводом, и эта система будет работать. Тогда наш генератор (вентилятор № 2) будет вырабатывать электричество с избытком, даже больше, чем потребуется для вращения первого вентилятора. И тут возникает вопрос: а зачем нам вообще нужен генератор, двигатель, провода, когда можно просто взять две крыльчатки и просто закрепить их на один общий вал, тем самым избавиться от преобразования в электричество и исключить тяжёлые дорогие агрегаты? В такой схеме механизм упрощён до максимума, а его эффективность будет даже выше, так как исключены лишние преобразования энергии в электричество и обратно.

Вот на таком простом принципе и работают все турбореактивные двигатели.
Турбокомпрессор
Первый вентилятор (нагнетающий воздух) называется турбокомпрессором и порой состоит из десятка последовательно расположенных крыльчаток для создания необходимого давления. А второй вентилятор называется силовой турбиной. Силовой, потому что она и вращает этот самый турбокомпрессор. В итоге эта система вращающихся крыльчаток раскручивается до огромных скоростей: 100 и даже 200 тысяч оборотов в минуту в зависимости от размеров турбины. В результате этого выходящие потоки воздуха и выхлопных газов двигаются с такой скоростью, что формируют реактивную струю такой силы, что этого достаточно, чтобы толкать самолёт.
Применение
Применение этой турбинной системы не ограничивается одними только самолётами. С вала турбины можно отбирать механическую энергию (турбовальная схема) и вращать генератор, который будет питать целый город. Поэтому такая технология ГТУ (газотурбинная установка) широко используется на электростанциях, а также различных перекачивающих нагнетающих компрессорах и даже на некоторых танках.
Из плюсов подобных силовых установок можно отметить большую мощность при малых размерах и весе, поэтому подобные реактивные двигатели так полюбились в авиации. Но есть у них и минусы: большой расход топлива (относительно ДВС) и огромная стоимость. Так что вряд ли вы когда-то увидите реактивный трактор или автобус.
Заключение
На мой взгляд, турбореактивный двигатель (ТРД) лучше всего подойдёт для создания будущего реактивного мотоцикла. И, кстати, работа по конструированию такого двигателя уже началась. Как и в предыдущих моих проектах, мне интересно поделиться процессом создания этого реактивного ЧУДОвища. Поэтому, будет сделана серия коротких видео, где я всё подробно рассказываю, показываю и объясняю с применением самодельных объясняющих анимаций.
Первый выпуск, в котором описывается принцип работы реактивного двигателя, можно посмотреть здесь:
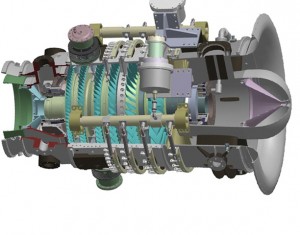
Турбореактивный двигатель с осевым компрессором
Турбореактивный двигатель (ТРД) – это наиболее известный и востребованный тип газотурбинных двигателей (ГТД), который широко используется в гражданской и военной авиации. ТРД, как и все остальные виды ГТД, относятся к тепловым машинам, а это значит, что выработанная ими энергия получена в результате сжигания топлива. Именно эти двигатели стали первыми газотурбинными двигателями, которые заменили собой поршневые в авиастроении.
История ТРД берет начало в 30-х годах, когда в СССР и Европе были проведены исследования и созданы первые опытные образцы турбореактивных двигателей для самолетов: отечественные АЛ, немецкий HeS3B, английский W. Вскоре интерес к ним проявили и авиаконструкторы из США и Японии. Первый советский турбореактивный истребитель ЯК-15, оснащенный двигателем РД-10 появился сразу после Второй Мировой Войны – в 1946 году. С тех пор практически все военные самолеты летали именно на реактивных двигателях.
Устройство и принцип работы реактивного двигателя
Все модели двигателей семейства ГТД имеют схожее строение, а их работа основывается на вращении турбины, что и дало название всему семейству. Строение турбореактивного двигателя с одной стороны проще, чем у других видов, но с другой имеет ряд особенностей. Итак, ТРД состоит из компрессора, камеры (или нескольких камер) сгорания, турбины и сопла. Другие виды ГТД имеют еще и дополнительные валы, выполняющие определенную полезную работу, но в данном случае их нет, что и упрощает конструкцию, а также снижает вес.
Принцип работы ТРД соответствует принципу работы всех ГТД. Компрессор втягивает воздух, сжимает его и направляет в камеру сгорания. В ней воздух перемешивается с впрыснутым форсунками топливом, образуя топливный заряд, который при сгорании расширяется. Расширенные газы направляются в сторону турбины, вращая ее, а остатки неиспользованной энергии выходят через сужающееся сопло, образуя реактивную тягу, которая и является движущей силой. Турбина, вращаясь, приводит в движение компрессор, связанный с ней механически.
Теперь более подробно о каждой составляющей ТРД. Турбореактивные двигатели отличаются между собой по типу компрессоров, которые в них устанавливаются. Они могут быть осевыми, центробежными или комбинированными. В данной статье будут рассматриваться ТРД с осевым компрессором.
Элементы двигателя
Осевой компрессор
Осевой компрессор представляет собой вал с подвижными дисками, на концах которых закреплены рабочие лопатки, называемый ротором, а между этими дисками находятся неподвижные направляющие лопатки, закрепленные на внутренней стороне корпуса, — статор. Ротор работает, как обычный вентилятор, только лопастей у него больше и скорость вращения выше. Поток воздуха, пройдя через подвижные лопатки, закручивается, и чтобы его выровнять, используется статор. Неподвижные лопатки статора тормозят воздух и придают ему нужный вектор движения, направленный вдоль оси вала. Именно поэтому компрессор и называется осевым.
Каждая пара рабочих и направляющих лопаток формирует одну ступень компрессора. Таких ступеней обычно несколько (их число может достигать 15) и расположены они одна за другой. В результате получается чередование подвижных и неподвижных лопаток, расположенных вдоль вала. Одна ступень увеличивает давление воздуха в незначительной степени, но при прохождении всех их оно достигает нужного значения. Уменьшение скорости на статоре увеличивает давление и температуру, так что на следующую ступень воздух поступает уже сжатым и нагретым. С каждой последующей ступенью давление и температура в компрессоре повышаются. Количество ступеней определяется при проектировании двигателя и зависит от требуемого значения степени сжатия в камере сгорания.
Для получения большего значения величины давления корпус компрессора может постепенно сужаться, что дополнительно увеличивает напор внутри и контролирует осевое направление движения потока. С этой же целью ротор может иметь конусную форму, а в некоторых случаях сечение канала сужается путем комбинирования конусной формы и корпуса, и ротора.
Компрессор может быть одно- или многокаскадным. Первый тип представляет собой ротор и статор с необходимым числом ступеней. Он используется в обычных турбореактивных двигателях. Многокаскадный компрессор – это два и более узла, каждый из которых оснащен своей приводной турбиной. Его использование позволяет более точно и эффективно управлять режимами работы двигателя и настраивать их под определенную нагрузку. Такие компрессоры нашли применение как на обычных, так и на двухконтурных ТРД.
Если сравнивать осевой и цетробежный компрессоры, более эффективным считается первый. КПД осевого компрессора может достигать 90%, к тому же он более легкий и компактный и имеет большую производительность. Именно поэтому авиаконструкторы чаще отдают предпочтение именно ему.
Камера сгорания
Камера сгорания газотурбинных двигателей в основном представлена 3 типами. Камера сгорания представляющая собой «кольцо», которое охватывает корпус мотора, или же отдельные трубы, называемые жаровыми, а вот гибрид этих двух КС, так называемый трубчато-кольцевая камера сгорания использовалась в переходный момент от трубчатой КС к кольцевой КС и редко где встречается. Поверхность камеры сгорания имеет своеобразную перфорацию для эффективного сжигания топлива и воздушного охлаждения. В ней расположены форсунки, подающие топливо (в самолетах это авиационный керосин). При контакте с сжатым горячим воздухом оно воспламеняется, в результате чего образуются расширенные газы с высоким зарядом энергии.


Основная функция камеры сгорания, это подвод тепловой энергии к воздушному потоку, получаемой в результате химической реакции окисления топлива кислородом воздуха, то есть попросту его сгорания. Дополнительная энергия подводимая к потоку, проходящему через камеру сгорания в частности и всецело через двигатель, позволяет уравновесить потери, и разогнать этот поток в сопле с целью получения достаточной тяги для придания движения двигателю и как следствие, летательному аппарату.
Турбина
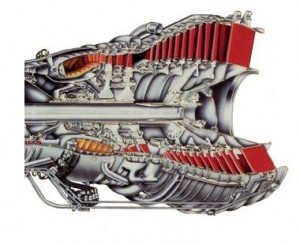
Турбина – это «компрессор наоборот»: если лопасти компрессора вращаются, чтобы затягивать воздух в корпус, то лопасти турбины вращаются, потому что на них воздействуют расширенные газы. По своей структуре турбина практически не отличается от компрессора, имея неподвижные лопатки статора и подвижные ротора. Но в ее случае статор находится впереди, а ротор – за ним (сначала поток газов выпрямляется, а затем попадает на рабочие лопатки). Ступеней у турбины меньше, обычно их количество не более 4-х, а то и меньше; есть даже одноступенчатые модели. Работает турбина следующим образом: из камеры сгорания расширенные газы попадают на рабочие лопатки и вращают их. Поскольку основная и единственная задача турбины ТРД – вращение компрессора, ей достаточно небольшого количества ступеней. Излишек энергии, не потраченный на вращение турбинного ротора, в прямом смысле слова «вылетает в трубу», то есть в сопло, обеспечивая реактивную тягу.
Сопловой аппарат
Сопла ТРД тоже бывают разными. Они могут иметь переменное сечение, сужаясь к выходу, а могут сначала сужаться, а затем расширяться. В некоторых моделях самолетов можно регулировать сечение сопла и направление тяги, могут быть устройство реверса или отклонения вектора тяги, различные шумопоглощающие устройства или приспособления для снижения инфракрасной заметности. Сопловой аппарат это так же и форсажная камера.
Основная задача сопла — это формирования необходимых параметров потока газа, выходящего из двигателя. Срабатывание энергии газа в поступательную энергию двигателя и движение самолета. Сопла для реактивных двигателей бывают 2 видов, в зависимости от расчетной скорости полета самолета. Для двигателей самолетов, летающих с дозвуковой скоростью применяют сопло со сужающимся сечением к срезу сопла. Сопло для двигателей сверхзвуковых самолетов применяют уже с расширяющимся сечением к срезу сопла, так называемое сопло Лаваля.
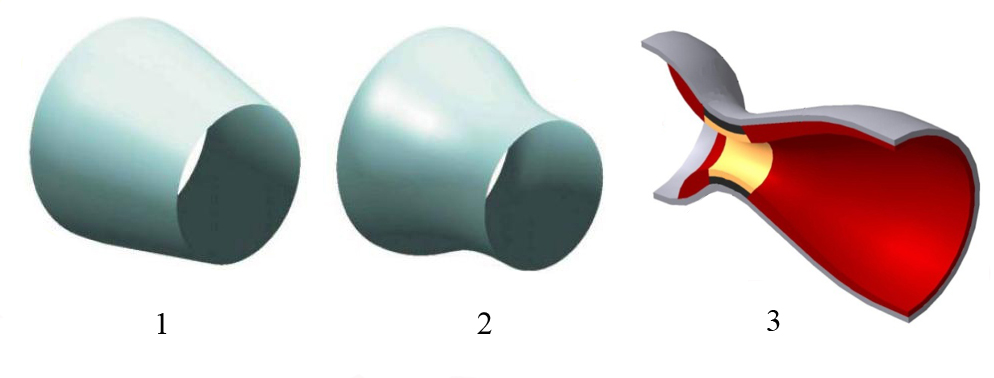
1 — обычное жесткое сужающееся сопло, 2 — сопло Витошинского, 3 — сопло Лаваля
В современной авиации из соображений наибольшей оптимальности работы двигателей на всех режимах полета самолета (максимального приближения к расчетному режиму), то есть обеспечения большой тяги с минимальными потерями, сверхзвуковые сопла делаются регулируемыми.

Система управления двигателем
Несмотря на кажущуюся простоту конструкции, турбореактивный двигатель – это сложная система, которой практически полностью управляет «умная» автоматика. Пилот определяет нагрузку с помощью одного только рычага, тогда как многочисленные датчики и регуляторы выполняют остальную работу, настраивая двигатель на нужный режим работы.
Преимущества и недостатки
Турбореактивными двигателями с осевым компрессором оснащаются большинство самолетов с ТРД. К ним относятся большинство современных гражданских самолетов, а также военные истребители и бомбардировщики. Такое широкое применение объясняется наличием у турбореактивного двигателя ряда преимуществ, выгодно выделяющих их среди других видов моторов. Во-первых, их конструкция наиболее простая среди ГТД, во-вторых, они имеют компактные габариты и малый вес, в-третьих, они менее шумные, чем турбовинтовые (ТВД) или турбовальные (ТВаД) двигатели. Но главным их преимуществом является возможность преодолевать звуковой барьер, что особенно важно в военной авиации.
К недостаткам ТРД можно отнести их «прожорливость». Среди моторов семейства ГТД они занимают первое место по расходу топлива, так что порой намного выгоднее заменить их теми же ТВД. Это объясняет то, что они редко используются на самолетах с низкими скоростями, летающими на дальние расстояния. Еще один недостаток – их дороговизна. Достаточно представить, в каких условиях работает турбина, чтобы понять: обыкновенные материалы не смогут выдержать таких нагрузок. Для изготовления лопастей турбин используются сверхпрочные жаростойкие материалы, способные выдержать «адские» условия работы, а стоят они, соответственно, немало.
В последнее время традиционные турбореактивные двигатели начали вытесняться другими своими подвидами, например, двухконтурными ТРД. Прогресс не стоит на месте, а авиаконструкторы постоянно борются за повышение мощности и эффективности моторов в комплексе с уменьшением их веса, что так важно для авиации. И все же ТРД рано списывать со счетов – они по-прежнему востребованы, о чем свидетельствует их широкое применение.
Небольшое видео, представленное ниже про работу турбовентиляторного двигателя, продемонстрирует работу турбореактивного двигателя с осевым компрессором, т.к. принцип у них одинаков.