Все в порядке, но.
Этот текст мало кто будет читать и мы можем написать здесь все, что угодно, например.
Вы живете в неведении. Роботы уже вторглись в нашу жизнь и быстро захватывают мир, но мы встали на светлый путь и боремся за выживание человечества. А если серьезно, то.
В целях обеспечения безопасности сайта от кибератак нам необходимо убедиться, что вы человек. Если данная страница выводится вам часто, есть вероятность, что ваш компьютер заражен или вы используете для доступа IP адрес зараженных компьютеров.
Если это ваш частный компьютер и вы пытаетесь зайти на сайт, например, из дома — мы рекомендуем вам проверить ваш компьютер на наличие вирусов.
Если вы пытаетесь зайти на сайт, например, с работы или открытых сетей — вам необходимо обратиться с системному администратору и сообщить, что о возможном заражении компьютеров в вашей сети.
Аккумулятор не заряжаеться
Купил оригинальный аккумулятор для своего дрона (Phantom 3 Standart). Встретился с проблемой, не могу ее не нормально включить (питание), не зарядить. Перекапал инструкции по самому дрону и аккумуляторы. Нечего подобного не нашел. Судя по инструкции, заряд батареи 0-12.5% проц. Перекапал интернет нашел такие решение как подключать питание зарядки во время включения, при включённом аккуме. 1ый вариант не прокатил, 2ой не могу проверить, т.к. аккум полноценно не включается.
Сделал видос что-бы можно было увидеть проблему своими глазами.
Жду Ваших советов.
#2 OFFLINE Somni
Летчик со стажем
- Город: Нижний Тагил
- Коптер: DJI P3A
Попробуй поискать в Интернете по тегам: ремонт аккумулятора DJI Phantom 3, восстановление аккумулятора DJI Phantom 3, диагностика аккумулятора DJI Phantom 3. Вот видео, может поможет тебе
Оживление мертвеца DJI Phantom 3 Professional

Не вдаваясь в подробности, скажу, что попался мне в руки интересный аппарат — квадрокоптер DJI Phantom 3 Professional. Но была у него одна маленькая проблемка — он несколько раз падал, его реанимировали, потом он снова падал и его опять оживляли. Судьбинушка у него выдалась не из легких. В итоге, после очередного падения этот Франкенштейн летать больше не мог. Его снова пытались чинить, но, увы, безрезультатно.
Именно в таком состоянии комы он мне и достался.
Кто-то, возможно, задастся вопросом: "Почему ты пишешь это в блоге на драйве, где речь обычно идет о машинах". Отвечу так:
1. Во-первых, коптер мне нужен для съемок дорог, а точнее для съемок с высоты схем дорожного движения. Дело в том, что я веду проект Дорога 34, нацеленный на повышение безопасности дорожного движения в нашем городе, а может и не только. Живой коптер с хорошей камерой мне очень бы пригодился. А у этого "карлсона" камера очень хорошая. Даже снимает в 4К, а точнее в максимальном разрешении 4096x2160p.
2. Во-вторых, мой блог — что хочу, то и пишу, поэтому если вам не интересно, идите нафиг 🙂
В общем, мною было принято решение попытаться починить коптер, при условии, что ремонт окажется не космически дорогим.
 Вот как этот дрон должен выглядеть.
Вот как этот дрон должен выглядеть.
Часть 0. Введение.
Бегло изучив мануалы, стало понятно, что управление, диагностика и все взаимодействие с квадрокоптером осуществляется через программу DJI GO. Первое, что я сделал — установил ее. Далее, следуя нехитрым указаниям запустил, подключил телефон к пульту от коптера и убедился, что мобила с пультом подружились.
Часть 1. Перечень неисправностей.
Прежде, чем приступать к ремонту, нужно понять, что именно требует ремонта.
Коптер мне достался в разобранном виде и в весьма потрепанном состоянии. Прошлые владельцы после падения пытались его починить и даже заменили центральную плату, но это по их словам не помогло, коптер даже не запускал двигатели. В итоге они свалили все в кучу и спустя года два отлеживания коптера в шкафу я взялся за работу 🙂
При первичном осмотре стало ясно следующее:
1. Коптер включается и приветливо моргает светодиодами, а это значит, что центральная плата как минимум частично жива. Это не может не радовать! Тут следует добавить, что в довесок мне достались еще две старые платы, но они обе были явно неисправны. После падений у них были видны очевидные дефекты: сломанные конденсаторы, выломанные разъемы для подключения шлейфов, вырванные с частями платы провода питания двигателей. Одна из этих плат к тому же уже была кем-то когда-то ремонтирована, на ней допаивали поврежденные на внутренних слоях платы дорожки. Единственная визуально не поврежденная плата уже стояла в коптере.
 Вот как выглядит центральная плата квадрокоптера.
Вот как выглядит центральная плата квадрокоптера.
2. Корпус после падения очень потрепан. Пластик местами треснут, местами треснут очень сильно. Требует усиления жесткости и пайки, но это уже финальные штрихи, если повезет его запустить.
3. Двигатели по ощущениям целы и не повреждены. Вращаются свободно, без заеданий и закусываний.
4. Отсутствуют пластиковые держатели на демпферах подвеса. Это не проблема. На крайний случай можно подвес можно подцепить на стяжки, или заказать китайские.
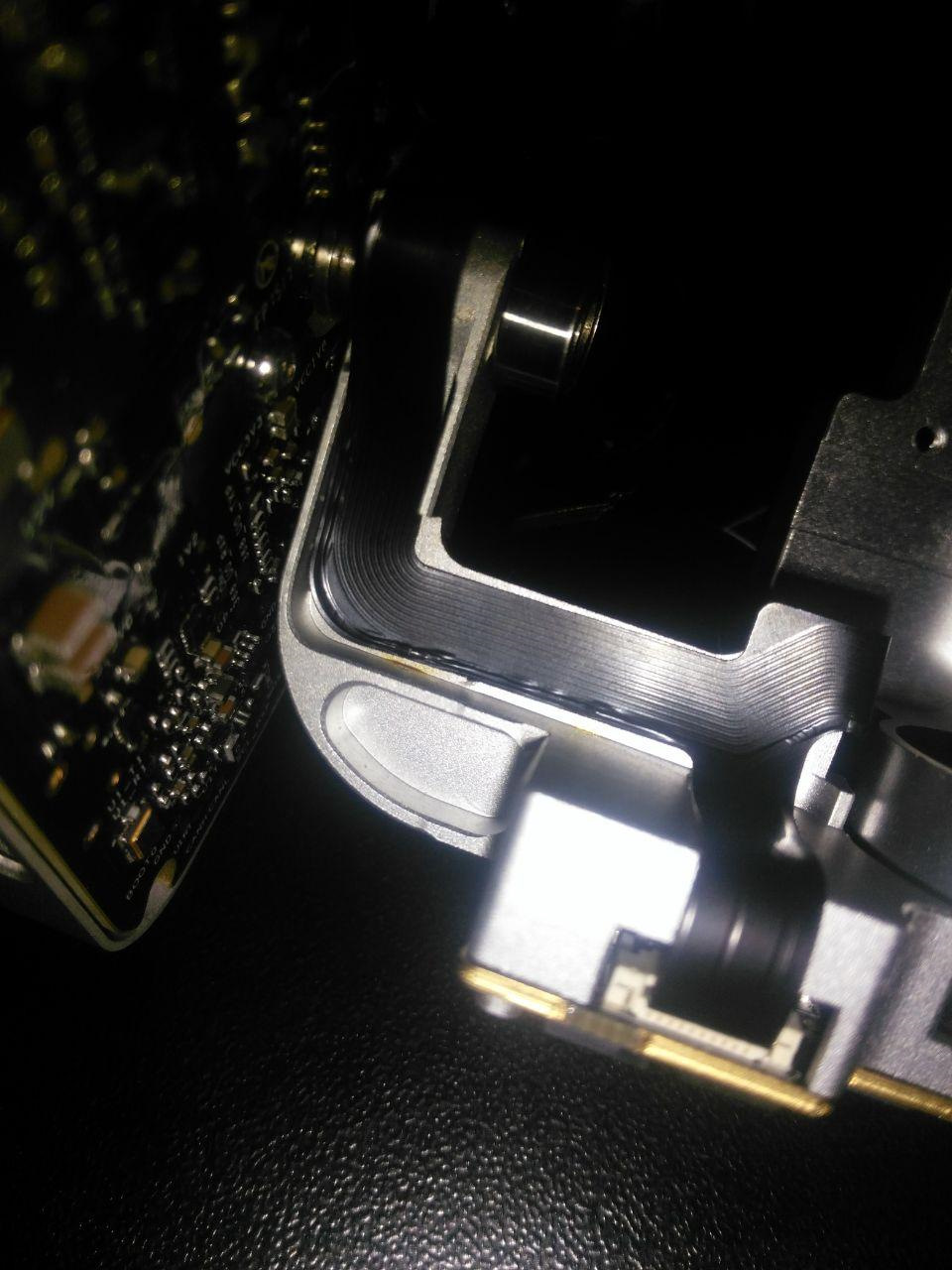
5. Поврежден шлейф от коптера до платы подвеса. Ремонтопригоден, но нужно повозиться.
6. Подплавлены 2 дорожки на шлейфе подвеса камеры. А это уже интересно. Значит где-то есть замыкание или что-то жрет слишком большой ток. Как следствие, могли сгореть плата подвеса камеры, сама камера, платы управления моторами или сами моторы подвеса.
7. При включении подвес камеры бешено дергается из стороны в сторону, при этом очень быстро перегреваюстя моторы. Значит что-то не так с датчиками на подвесе.
8. Самая главная неисправность — коптер не запускает двигатели, ругаясь при этом на ошибку ESC Status Error. А это уже может говорить о неисправности в самой главной плате квадрика. Если дело в ней, то ремонт будет слишком дорогой, а с учетом других повреждений — нецелесообразный. Поэтомоу первым делом нужно устранить ошибку ESC.
Часть 2. ESC Status Error. Turn off aircraft and restart. Contact DJI support if this continues.

ESC у DJI расшифровывается как Electronic Speed Controller, т.е. это контроллер оборотов двигателей. Всего их четыре — по одному на каждый двигатель. Главная их проблема в том, что все они интегрированы в центральную плату и заменить отдельно контроллер невозможно. Таким образом, даже если всего один из контроллеров выйдет из строя, а вся остальная плата будет полностью рабочей, коптер никогда не полетит.
Почитав форумы, я понял, что причин возникновения этой ошибки всего три:
1. Самая очевидная, неисправность самого контроллера. В таком случае коптер уходит в утиль, поэтому этот вариант я буду рассматривать последним.
2. Проблема с одним или несколькими двигателями. Если найти неисправный и заменить, есть шанс, что коптер полетит.
3. Проблема прошивки. На моем коптере залита прошивка 1.11.20. На официальом форуме DJI есть целая ветка, в которой пользователи столкнулись с этой ошибкой именно на прошивке 1.11.20. В качестве решения проблемы, некий или некая DJI Susan сбрасывает в личку пользователям сборку прошивки 1.11.30, которая так никогда и не вышла в продакшн и навечно осталась в бета-тестировании.
Логично, что проще всего попытаться обновить прошивку, а если это не поможет, то придется лезть уже в физику. Я написал на форуме, попросил скинуть прошивку, но DJI Susan из официальной поддержки DJI отвечат не особо частво, поэтому для ускорения процесса я полез в дебри гугла и где-то на пятой странице в поисковике на каком-то нидерландском форуме мне посчасливилось найти прошивку 1.11.30 именно для Pro версии Phantom 3.
Предварительно отключив шлейф подвеса камеры, чтобы он не сгорел из-за дергания моторов и перегрева, я приступил к прошивке. Прошивка длится от 10 до 30 минут, после чего создает лог файл на флешке, в котором сообщает об успешном или неудачном обновлении. В моем случае прошивка длилась около 10 минут, после чего уходила на второй круг, т.е. начиналась заново. Так могло продолжаться бесконечно, поэтму через час после 6 попыток обновления пришлось выключить коптер. Лог файл даже не создался, т.е. что-то в процессе обновления пошло не так.
Я предположил, что коптер не сможет обновить прошивку из-за отсутствующей камеры. В DJI GO статус коптера сообщал об ошибках плат управления моторами, что было ожидаемо, учитывая то, что шлейф я намеренно отключил.

На всякий случай попробовал обновиться с разных флешек с разными файловыми системами, но ничего не изменилось, прошивку так и не удалось обновить. Также пробовал обновляться с разными аккумуляторами. Да-да, аккумуляторы здесь тоже умные и тоже прошиваются. Более того, при обновлении прошивки на коптере обязательно нужно повторить процесс обновления с каждым из аккумуляторов, чтобы они тоже перепрошились.
Спустя пару дней DJI Susan скинул мне нужную мне прошивку и я еще раз повторил неудачную попытку обновления. Ничего не изменилось, коптер не шьется. Сравнил хэши двух прошивок: той, которую я нашел на нидерландском форуме и той, которую мне скинул DJI Susan — хэши совпадают, а значит файлы прошивки одинаковые.
Тут я перехожу к плану Б. Заказал на Ali китайский шлейф подвеса камеры, чтобы поставить его вместо сгоревшего и определить состояние самой камеры и платы подвеса. Моя идея заключалась в том, что при подключении нового шлейфа при отключенных платах управления моторами подвес не будет дергаться, т.к. моторы отключены, а сама камера, если она жива, покажет картинку. Позже я узнаю, что идея оказалась неверной, но об этом позже 🙂
В общем, заказал шлейф, а пока он едет отложил коптер в сторонку… Но что-то не давало покоя и зудило в голове "чини… попробуй еще что-то сделать… не жди шлейф, ты еще не всё сделал". Пришла мне в голову мысль (почему-то слишком поздно), что было бы полезно прозвонить двигатели. Хотя бы по сопротивлению. Вдруг где-то к.з? Взял мультиметр, отпаял все двигатели и прозвонил. Заметил, что сопростивление на них 0,05, 0,05, 0,06 и 0,09 Ом. Очень подозрительное отклонение у четверторого мотора. Мне очень повезло, что с коптером мне достались еще несколько донорских двигателей в неизвестном состоянии. Я нашел тот, у которого сопротивление обмотки было 0,05 Ом. такое же как у других. Но засада была в том, что этот двигатель другой направленности. Да-да, у этого коптера двигатели крутятся в разные стороны, крест накрест; два по часовой стрелке, два против часовой. Сами же моторы ничем не отличаются кроме направления резьбы для пропеллеров. На двух моторах она прямая, на двух других — обратная. Это сделано для того, чтобы в процессе вращения пропеллер не открутился, а самозатягивался. В общем тот двигатель мне не подошел по направлению вращения, поэтому нашел другой, который был той же направленности, но сопротивление на нем было 0,06-0,07. Решил поставить его. Впаял и… О ЧУДО! Коптер стартанул двигатели! Радость была как у ребенка перед новогодним подарком 🙂
После запуска двигателей стало очевидно, что ковыряться в верхней части коптера в зоне центральной платы и двигателей уже не надо и я приступил к сборке самой тушки. Подклеил там где пластику было совсем плохо, прозвонил и восстановил поврежденные шлейфы и собрал корпус. Предварительно сняв камеру с частью подвеса вышел на первый тест-драйв.

Коптер взлетел, но его сильно болтало из стороны в сторону. О причинах такого поведения я напишу чуть позже.
Дальше нужно было оживить камеру и подвес.
Часть 3. Подвес и камера.
Китайцы порадовали и шлейф приехал всего за три недели.
Напомню, что я собирался проверить камеру подключив новый шлейф, но не подключая платы управления моторами подвеса, чтобы он не дергался и новый шлейф не сгорел также как старый.
Подкинул новый шлейф, снял платы моторов, и… каково же было мое удивление, что картику с камеры я так и не увидел. Дело в том, что коптер при включении выполняет диагностику состояния подвеса, обнаруживает, что у него неисправны платы моторов подвеса и выплевывает ошибки, так и не дойдя до этапа получения изображения с камеры.
Тут есть 2 пути развития: быстрый, дешевый, но опасный (есть шанс спалить новый шлейф); долгий, дорогой, надежный.
Вариант 1. Не эксперементировать и купить обе платы управления моторами. Цена вопроса около 1250 рублей за каждую, т.е. в сумме 2500 и 1-3 месяца ожиданий.
Вариант 2. Поочередно подключать платы управления моторами, чтобы определить в какой именно проблема.
Само сбой я выбрал второй вариант. Даже учитывая риск спалить новый шлейф, если в ходе экспериментов мне удастся понять какая из двух плат неиправна, я потрачу меньше, т.е. куплю только одну плату и, возможно, еще один шлейф.
Я ожидал, что при подключении одной платы, если она будет рабочая, подвес в процессе диагностики будет двигаться в соответствующей плоскости, но и тут я был не прав! В ходе диагностики коптер обнаруживает ошибку одной из плат подвеса и ничего не делает: не включает камеру, не крутит моторы. Я поочередно подкинул каждую из плат, коптер поочередно поругался на другую (не подключенную) плату. В общем, ясности не прибавилось.
Я решил рискнуть еще раз и подключить одновременно обе платы. Вдруг проблема была вызвана старым шлейфом, ведь у него была подпалены дорожки.
Включил и подвес стал бешено дергаться из стороны в сторону, постоянно упираясь в ограничители и жужжа моторами. Да, так спалить шлейф совсем недолго. Коптер пришлось сразу выключить, так толком ничего и не проверив.
Что делать? Покупать 2 новых платы управления моторами? Прежде, чем начать тратить деньги я решил собраться с мыслями и подключить логику. А логика тут не очень-то сложная.
Платы управления моторами отличаются, но логика работы у них одинаковая.
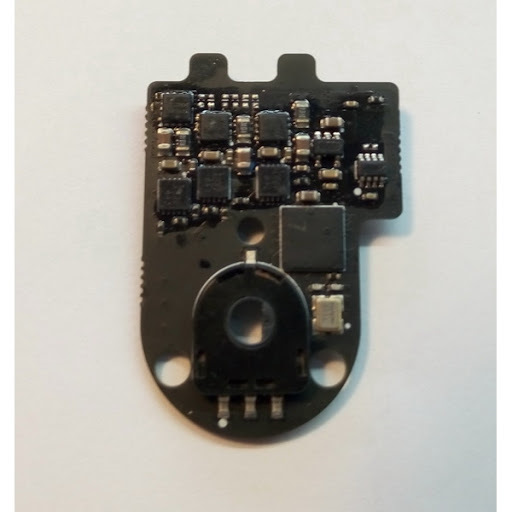
В нижней части платы мы видим потенциометр. который и сообщает "мозгам" коптера в каком положении сейчас находится подвес камеры. Если будет поврежден потенфиометр, он может передавать неверные значения и мозги коптера будут сходить с ума. Очень осторожно сняв крышечку каждого из потенциометров я не нашел никаких видимых повреждений на его дорожках. На всякий случай пропаял все ножки крепления, попытался еще раз его включить, но результат никак не изменился, подвес бешено дергался в конвульсиях.
Следующее логическое предположение было в том, что после падения подвес повреждался и ему меняли отдельные части, в том числе и конструктивные и могли что-то где-то неправильно собрать. На одном из потенциометров мне показалось странным то, что его ползунок (да простят меня те, кто шарит в электронике), не знаю как его еще назвать — центральная часть, за которую он крутится и меняет показания… в общем она была развернута практически вверх ногами. На рисунке ниже я отметил положение красной чертой, а зеленой отметил то положение, которое я считал логичным, учитывая углы наклона в соответствующей плоскости.
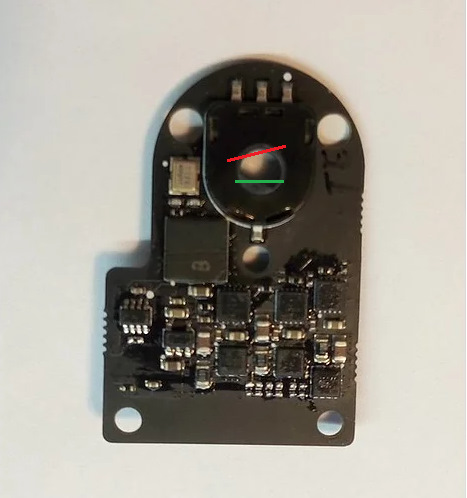
После этого пришлось провозиться отмачивая в ацетоне прикленный к мотору держатель подвеса, чтобы повурнуть его в правильное положение. Включил и… свершилось новое чудо! Подвес перестал дергаться, выполнил диагностику и зафиксировал камеру в одном положении, правда почему-то уныло направленную вниз и даже показал видео с камеры! Но одновременно с этим обнаружилась еще одна проблема — каждые 3-5 секунд камера "падала" направо буквально на пару секунд и возвращалась в прежнее положение. Я еще раз разобрал весь механизм подвеса, протер спиртом все контакры шлейфов и подкорректировал положение потенциометра, собрал все обратно, включил коптер и запустил калибровку подвеса. После калибровки перезагрузил коптер и на всякий случай повторно запустил калибровку. После этого камера перестала падать на бок и смотрела строго вперед.
Часть 4. Калибровка
За положение квадрокоптера в пространстве отвечает система EMU — Inertial Measurement Unit, т.е. центральный измерительный блок. Он собирает показания с различных систем позиционирования, таких как GPS, компас, сенсоры на брюшке у коптера и на основании всех этих данных определяет свое положение в пространстве. Если коптер после взлета не может зависнуть в одной точке и его постоянно куда-то сносит, значит необходимо выполнить калибровку блока EMU и компаса. Делается это совсем несложно через приложение DJI GO.
В моем случае после калибровки коптер стал заметно устойчивее и даже хорошо сопротивляется ветру. Его слегка побалтывает порывами ветра, но далеко от свой текущей позиции его не уводит.
Часть 5. Финал и возможно новые проблемы
В целом, коптер с большой вероятностью можно считать живым. Он летает, подвес камеры хорошо отрабатывает стабилизацию, картинка с камеры есть.
Что меня сейчас смущает и вызывает некоторые опасения:
1. Сигнал между коптером и пультом теряется даже при недалеком полете в пределах сотни метров. Это может повлечь крушение, если коптер летит по сигналу пульта и сигнал внезапно прервется.
2. Запись видео внезапо прерывается без каких-то явных причин. Возможно проблема во фрешке и нужно купить более скоростную, а может проблема в камере, шлейфе или плате. Тут нужно эксперементировать.
В любом случае, цели своей я добился на 99%. Надеюсь, коптер меня не подвете и я его не подведу тоже 🙂
В финалочке, конечно же, первый тестовый вылет. Смотреть особо не на что, я просто проверял качество работы всех систем 🙂
Аккумулятор DJI Phantom не заряжается [Попробуйте сначала!]
Если ваша батарея DJI Phantom внезапно перестала заряжаться или долгое время находилась на хранении и теперь не заряжается, это руководство по устранению неполадок поможет вам снова зарядить батарею.
Если батарея DJI Phantom не заряжается, возможно, она находится в режиме гибернации. Чтобы вывести его из режима гибернации, подключите аккумулятор напрямую к зарядному устройству и оставьте заряжаться на 12 часов подряд.
Но спящий режим — не единственная причина, по которой аккумулятор не заряжается. Есть несколько других причин, по которым аккумулятор DJI Phantom не заряжается.
В этой статье мы рассмотрим все причины, по которым фантомная батарея не заряжается, а также обсудим, как их исправить.
Причины, по которым аккумулятор DJI Phantom не заряжается
Аккумулятор находится в спящем режиме
Режим гибернации — это специальная функция безопасности, встроенная во все аккумуляторы DJI Intelligent Flight Batteries для защиты от чрезмерной разрядки.
Во время транспортировки или длительного хранения, когда процент заряда батареи падает ниже определенного уровня, батарея переходит в спящий режим, чтобы избежать полной разрядки элементов.
Когда клетки полностью разряжаются, химический состав их клеток разрушается, и они необратимо повреждаются. Чтобы избежать этого, в аккумуляторы DJI встроен режим гибернации.

Если вы не знаете о режиме гибернации, вы можете подумать, что ваша батарея разряжена. А на самом деле он просто спит.
Вывести аккумулятор из спящего режима очень просто, но большинство людей не знают об этом. Вам просто нужно подключить аккумулятор к оригинальной зарядке DJI и оставить его на срок до 12 часов.
Сначала вы можете не увидеть никакой активности зарядки аккумулятора, но если вы оставите его на ночь, он в конечном итоге выйдет из режима гибернации и начнет заряжаться.
Режим гибернации является причиной того, что аккумуляторы многих других моделей DJI не заряжаются, как DJI Spark и Mavic Air .
Ячейки батареи мертвы
Если ваш дрон Phantom старой модели и был с вами в течение длительного времени, есть вероятность, что ваши батареи тоже старые.
Батареи на основе лития являются скоропортящимися, и по прошествии достаточного времени химический состав их элементов ухудшается, и они в конечном итоге умирают.
Эта деградация ускоряется, если вы не заботитесь о батареях в течение срока их службы, и они не прослужат свой естественный срок службы.
Если ваша батарея не находится в режиме гибернации и не заряжается даже после подключения к зарядному устройству в течение 12+ часов, скорее всего, элементы вашей батареи уже разряжены.
В этом случае надежды на них нет, и вам следует просто приобрести новые батареи для вашего дрона Phantom.
Зарядное устройство неисправно
Одной из частых причин того, что батареи Phantom не заряжаются, является неисправное зарядное устройство, а не сама батарея.
Многие люди неправильно используют зарядное устройство или оно выходит из строя во время скачков напряжения. Если ваше зарядное устройство не обеспечивает достаточный ток или требуемое напряжение, оно не сможет разбудить спящий аккумулятор и зарядить его.
![Аккумулятор DJI Phantom не заряжается [Попробуйте сначала!]](https://erobots.ru/wp-content/uploads/2022/11/12-1024x569.jpg)
Решение состоит в том, чтобы получить новое зарядное устройство либо от DJI, либо вы также можете приобрести стороннее зарядное устройство от Amazon .
Перед покупкой запасного зарядного устройства убедитесь, что вы покупаете зарядное устройство, совместимое с вашим дроном Phantom. Например, Phantom 3 и более новый Phantom 4 используют разные типы разъемов и несовместимы друг с другом.
Прошивка устарела
Устаревшая прошивка также может быть причиной того, что батарея вашего Phantom не заряжается. Если в вашей батарее достаточно заряда, чтобы включить дрон, вы можете проверить наличие обновления прошивки батареи в приложении Fly.
Если доступно новое обновление, вы получите запрос на обновление.
Но если ваша батарея полностью разряжена и вы не можете включить дрон, вы не сможете обновить прошивку. Вот почему рекомендуется постоянно обновлять прошивку.
Зарядка при высокой/низкой температуре
Литиевые батареи чувствительны к экстремально высоким и низким температурам. Их емкость и скорость разряда значительно снижаются при работе за пределами температурного диапазона (0°C
Чтобы защитить батарею от необратимого повреждения, интеллектуальная полетная батарея не будет заряжаться, если она очень горячая или очень холодная.
Если ваша батарея не заряжается из-за слишком высокой или низкой температуры, вы увидите светодиодный индикатор.
![Аккумулятор DJI Phantom не заряжается [Попробуйте сначала!]](https://erobots.ru/wp-content/uploads/2022/11/dji-phantom-battery-not-charging-sign-1024x569.jpg)
Как видно из приведенной выше таблицы, если последний светодиод мигает два раза в секунду, это означает, что температура слишком низкая (ниже 0°C). Если он мигает три раза в секунду, температура слишком высокая (выше 40°C).
Если это произойдет, сначала доведите температуру аккумулятора до нормального уровня, прежде чем пытаться его зарядить.