Принцип работы гироскопа
Простыми словами, гироскоп – это волчок, быстро вращающийся вокруг вертикальной оси, закрепленный на раме, которая способна поворачиваться вокруг горизонтальной оси, и закреплена на другой раме, которая поворачивается вокруг третьей оси.
Как бы мы ни поворачивали волчок, он всегда имеет возможность все равно находиться в вертикальном положении. Датчики снимают сигнал, как волчок ориентирован относительно рам, а процессор получает информацию и считывает с высокой точностью, как рамы в этом случае должны быть расположены относительно силы тяжести.
Что такое гироскоп в смартфоне
Современные мобильные устройства в большинстве своем оснащены гироскопами. Их еще называют гиродатчиками. Этот элемент смартфона работает на постоянной основе, автономно, не требует калибровки. Этот прибор не нужно включать, но в некоторых телефонах есть функция отключения с целью экономии энергии. Выполнен он в виде микроэлектромеханической схемы, расположенной под корпусом смартфона.
Для чего нужен
Внедрение технологии гиродачиков в мобильные девайсы существенно расширило их функционал и добавило новый способ управления устройствами. Например, простое встряхивание телефона позволит ответить на входящий звонок. Изменение ориентации экрана с помощью наклонов смартфона тоже реализовано благодаря гиродатчикам; этот прибор обеспечивает стабилизацию камеры. В приложении «Калькулятор» простой поворот экрана на 90 градусов открывает дополнительные функции программы.
Гиродатчик очень упростил пользование встроенными в смартфон картами. Если человек повернет свой девайс «лицом» к, скажем, конкретной улице, то это отобразится на карте с высокой точностью. Хороший смартфон с гироскопом обеспечивает пару интересных возможностей для мобильного гейминга. Управление виртуальным автомобилем становится невероятно реалистичным, когда для вождения машины используются повороты смартфона. В технологиях виртуальной реальности с помощью гиродатчиков отслеживаются повороты головы.
Как работает гироскопический датчик
В гиродатчике есть две массы, двигающиеся в противоположных направлениях. Когда появляется угловая скорость, на массу действует сила Кориолиса, направленная перпендикулярно их движению. Происходит смещение масс на величину, пропорциональную прикладываемой скорости. Меняется расстояние между подвижными и неподвижными электродами, что приводит к изменению емкости конденсатора и напряжению на его обкладках, а это уже электрический сигнал. Такие электронные сигналы и распознаются гиродатчиком.
Как узнать, есть ли гироскоп в смартфоне
Простой способ – ознакомиться с характеристиками девайса на официальном сайте производителя. Если гиродатчик имеется – это обязательно будет указано. Некоторые производители умалчивают о том, есть ли гироскоп на телефоне, не желая тратить на него место. Их можно понять – все сейчас стремятся сделать телефон легче и тоньше. В таких случаях помогут сторонние приложения.
На YouTube есть целый раздел видео, которые можно поворачивать на 360 градусов. Если у вас поддерживается возможность управления таким видео через повороты смартфона, значит работает гироскоп. Еще можно установить приложение AnTuTu Benchmark, которое проводит полную диагностику вашего устройства. Там вы найдете строку о наличии или отсутствии гироскопа.
В каких телефонах есть гироскоп
Первым смартфоном, в котором был установлен гиродатчик, является Iphone 4. Покупатели позитивно отнеслись к такому нововведению и с тех пор телефоны с гироскопом начали заполнять рынок. Все последующие версии смартфонов Apple были оборудованы гиродатчиками. Владельцам андроид-устройств в этом плане немного сложнее, благо, о наличии датчика можно спросить у консультанта перед покупкой, или проверить самому. Гироскоп в телефоне – это важный бонус.
Видео
Гироскоп: применение
Чаще всего этот прибор используется в качестве чувствительного элемента для указывающих гироскопических приборов, а также в качестве датчика угла поворота или угловой скорости для устройств, работающих под автоматическим управлением. В некоторых случаях гироскоп может послужить в качестве генератора энергии или момента силы.
Принцип работы гироскопа позволяет активно использовать его в авиации, судоходстве и космонавтике. Почти у каждого морского судна дальнего плавания имеется гирокомпас для автоматического или ручного управления судном, а в некоторых используются и гиростабилизаторы. Система управления огнем корабельной артиллерии обычно оснащается множеством дополнительных гироскопов, которые предназначены для обеспечения стабильной системы отсчета или для измерения угловых скоростей.
Вертолеты и самолеты тоже обязательно оборудуются этими приспособлениями для того, чтобы давать надежную информацию о деятельности систем навигации и стабилизации. К таким приборам можно отнести авиагоризонт, гироскопический указатель поворота и крена, гировертикаль. Если рассматривать вертолет с гироскопом, то тут этот прибор может служить как в качестве указывающего устройства, так и в качестве датчика автопилота.
Многие самолеты оснащены гиростабилизированными магнитными компасами и прочим оборудованием – фотоаппаратами с гироскопами, гиросектантами, навигационными визирами. В военной авиации активно используются гироскопы в качестве составных элементов в прицелах бомбометания и воздушной стрельбы.
Гироскоп в смартфоне – что это?
Гироскоп в сотовом телефоне не имеет ничего общего с традиционным механическим устройством. Здесь модуль представляет собой микроскопическую электронную плату, которая способна вычислять угловые скорости, передавая соответствующую информацию в виде электрических сигналов. Как правило, габариты такого чипа составляют всего лишь несколько миллиметров. Если отвечать в общих чертах на вопрос: «Гироскоп в смартфоне — что это?», то несведущему человеку может показаться, что никакой особой пользы владельцу эта фишка не несет — применение устройства направлено всего лишь на определение отклонения мобильного гаджета от собственной оси. Но так ли это?
Отличие гироскопа от акселерометра
Гироскоп в смартфоне – что это? Такой модуль способен передавать данные тем или иным приложениям об угле наклона мобильного гаджета по отношению к земной поверхности. Подобная функция закреплена также за акселерометром. Однако указанные девайсы имеют различный принцип работы. Ведь функционирование акселерометра основано на вычислении собственного ускорения в пространстве. На практике отмеченные возможности обеих систем оказываются взаимозаменяемыми. Именно по этой причине современные смартфоны оснащаются как гироскопом, так и акселерометром.
Функции гироскопа
Зачем нужен гироскоп в смартфоне? Применение датчика открывает следующие возможности. В первую очередь благодаря элементарному встряхиванию мобильного телефона пользователь способен быстро ответить на входящий звонок. Гироскоп позволяет просматривать изображения, переключать аудиозаписи в плеере, облегчает переворачивание страниц во время просмотра текстовых документов.
Еще зачем гироскоп в смартфоне? Чрезвычайно удобным модуль становится при использовании калькулятора. Благодаря отклонению гаджета в ту или иную сторону можно выбирать функции умножения, деления, вычитать и слагать значения.
Разработчики мобильных устройств нашли применение гироскопу также при работе с различными приложениями и программным обеспечением. При встряхивании некоторых устройств автоматически происходит обновление Bluetooth. Очень удобным наличие модуля становится при необходимости измерения уровней и углов наклона.
Гироскоп незаменим в случае работы с электронными картами. Модуль дает возможность определять точное положение пользователя на определенной местности. При запуске навигатора карта будет менять положение вслед за поворотом человека. Если пользователь развернется лицом к тому или иному объекту, это сразу же отобразится на визуальной схеме. Такая функция будет крайне полезной для людей, которые увлекаются активным отдыхом, в частности путешествиями и ориентированием на местности.
Без гироскопа не могут обойтись любители мобильных игр. Функциональный модуль способствует созданию более реалистичной картинки и облегчает управление. Особенно правдоподобными благодаря гироскопу становятся всевозможные симуляторы, шутеры, трехмерные бродилки. Чтобы езда на виртуальной машине либо полет на самолете казались более реальными, достаточно изменения положения смартфона в одной из плоскостей.
Если пользователь мобильного телефона в дальнейшем планирует использовать шлем виртуальной реальности, в таком случае наличие гороскопа выступает обязательным условием. Без датчика станет невозможным отслеживание системой смартфона поворотов головы, перемещения человека в пространстве.
Недостатки
Но наличие в смартфоне гироскопа может обернуться минусом, да таким, что отдельные пользователи стараются сразу же отключить функциональный модуль. Речь идет о реакции некоторых приложений на изменения положения сотового телефона в пространстве со значительным запозданием.
Сравнительным недостатком наличия гироскопа в смартфоне выступают неудобства, которые способны возникать при чтении электронной книги. Если пользователь произвольно меняет позу, датчик тут же преобразит ориентацию странички в соответствующей плоскости. Подобные моменты обычно вызывают раздражение.
Как определить, есть ли гироскоп в смартфоне
Узнать о присутствии функционального модуля в системе мобильного устройства можно несколькими способами. Наиболее простой и доступный вариант – ознакомление с описанием модели смартфона на официальном сайте изготовителя либо просмотр прилагающейся к гаджету технической документации.
Существуют и другие решения. Например, можно прибегнуть к установке на телефон специальных приложений. Одним из таковых выступает AnTuTu Benchmark. После инсталляции и запуска приложения достаточно перейти на вкладку «Информация». Через несколько мгновений на экране отобразятся все спецификации смартфона.
В качестве альтернативы вышеуказанному варианту можно воспользоваться утилитой Sensor Sense. Приложение фиксирует данные, которые исходят со всех датчиков, встроенных в мобильное устройство. Если в списке «запеленгованных» модулей не окажется гироскопа, это будет свидетельствовать о его отсутствии.
Гироскоп в смартфоне. Зачем он нужен и как работает
На фотографии сверху можно увидеть мобильное приложение, имитирующее акселерометр.
Современное строение акселерометров позволяет связывать их с бортовым компьютером в автомобилях, поездах, самолетах и ракетах. Таким образом, получается абсолютная целостная система. Ее основной задачей является анализ измерения показателя ускорения. Впоследствии компьютером дается соответствующая команда о корректировке работы, при этом увеличивается или уменьшается скорость движения.
На данный момент использование датчика акселерометра вышло за пределы транспортной индустрии. Данное устройство также стало устанавливаться и в мобильные телефоны, но при этом в немного другой форме. Именно о современной вариации уменьшенного прибора и пойдет речь далее.
Что такое гироскоп в телефоне
Как и OTG, гироскоп в смартфонах на базе Андроида, Айфонах и других современных мобильных устройствах — это программно-аппаратная технология, позволяющая владельцу пользоваться своим телефоном с наибольшим уровнем комфорта. По сути же гироскоп — это небольшой датчик, встроенный в общую плату и передающий операционной системе информацию о текущем положении аппарата в пространстве.
Но сначала — несколько слов и гироскопах в целом. Устройства такого типа, позволяющие измерять отклонение от «точки спокойствия» во всех трёх измерениях, появились очень давно; традиционно изобретение прибора приписывают И. Боненбергеру, жившему в начале XIX века, однако практические модели существовали с незапамятных времён; самый простой их пример — юла, то есть игрушка, способная долгое время сохранять движение относительно центра тяжести.
Устройство, созданное Боненбергером и окончательно оформленное жившим чуть позже М. Фуко, технически представляло собой тяжёлый диск, вращающийся в трёх ориентированных по осям X, Y и Z сферах. И, как уже упоминалось, центр тяжести диска (в ранних версиях — шара) оставался неизменным вплоть до прекращения вращения, вне зависимости от наклона сфер.
Нанеся на внешние ободы прибора шкалу, учёные смогли отслеживать наклон, а стало быть — и изменение направления движения относительно Земли как неподвижной точки. С того времени и по сей день гироскопы, в том числе в телефонах, используются именно с этой общей целью: для определения перемещения в пространстве.
Разумеется, внутри смартфона нет ни вращающихся дисков, ни тяжёлых шаров; вместо них в плату впаиваются микроприборы, содержащие ничтожно малые количества перемещающегося вещества. Найти гироскоп, не разбираясь в схемотехнике на высоком уровне, почти невозможно — внешне он ничем не отличается от других датчиков.
Устройство гироскопа
Прибор гироскоп был изобретен еще в 19 веке. Его работа заключается во вращении твердых тел с высокой скоростью вокруг оси. Самым простым и наглядным примером работы агрегата является простая игрушка юла. Когда мы раскручиваем ее, она вращается вокруг оси до тех пока на нее не начинают воздействовать внешние силы.
Гироскоп в свою очередь не подвержен такому воздействию и сохраняет устойчивость благодаря гораздо большей силе вращения, чем у юлы. Таким образом, вы можете поворачивать аппарат как угодно, но его ось останется неизменно вертикальной.
Самый первый гироскоп был механическим, однако дальше, с развитием науки он стал лазерным и оптическим. В электромеханике сегодня такие приборы используются в виде микроэлектромеханических датчиков. Именно таким образом он умещается в телефон, сложную навигационную систему кораблей, самолетов и вертолетов.
Таким образом, в современном мире люди живут, что называется на высоких скоростях. Однако для упрощения и увеличения качества жизни в бытовой обиход входят все больше приборов, которые ранее использовались только для высоких технологий. Одним из таких примеров, является гироскоп в телефоне. Что это за устройство, давно знают капитаны морских судов и подводных лодок, пилоты и космонавты. В современном гаджете такое устройство появилось относительно недавно, но уже прочно закрепилось среди важных и полезных функций.
MEMS-акселерометры и гироскопы — разбираемся в спецификации
“Хьюстон, у нас проблемы”, — устало раздалось в мозгу, пытающемся в ночи продраться сквозь Datasheet IMU MPU-9250 от InvenSense. Когда все слова в отдельности понятны, но взаимосвязь их запутана до невозможности. Началось всё с параметра LSB, про который я только смутно помнила, что в переводе это Least Significant Bit. Дальше пошли “Resolution”, “Sensitivity”, а ещё дальше я поняла, что получающийся текст уже можно озаглавить “Datasheet для чайников”.
Немного об основных блоках инерционного модуля.
MEMS-гироскоп
MPU-9250 состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z- осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации (, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения [Время Электроники]. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. Данный сигнал оцифровывается с помощью встроенного в плату 16-битного АЦП. Скорость оцифровки (sample rate) может программно варьироваться от 3.9 до 8000 выборок в секунду (samples per second, SPS), а задаваемые пользователем фильтры низких частот (LPF) предоставляют широкий диапазон возможных частот среза. ФНЧ нужен, в том числе, чтобы убирать вибрации от моторов (как правило, выше 20-25 Гц).
Трёхосевой MEMS-акселерометр
Использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). Архитектура MPU-9250 снижает подверженность температурному дрейфу и вариациям электропараметров. При расположении устройства на плоской поверхности оно измерит 0g по X- и Y-осям и +1g по Z-оси. Масштабный коэффициент (scale factor — отношение изменения выходного сигнала к изменению выходного измеряемого сигнала) калибруется на заводе и не зависит от напряжения питания. Каждый сенсор снабжен индивидуальным сигма-дельта АЦП (состоит из модулятора и цифрового фильтра низких частот, подробнее про устройство в [Easyelectronics]), выходной цифровой сигнал которого имеет настраиваемый диапазон измерений.
И сразу про трёхосевой MEMS-магнетометр
Основан на высокоточной технологии эффекта Холла. Включает в себя магнитные сенсоры, определяющие напряжённость магнитного поля земли по осям, схему управления, цепь усиления сигнала и вычислительную схему для обработки сигналов с каждого датчика. Каждый АЦП имеет разрешение 16 бит, диапазон измерений . Для измерения слабых магнитных полей применяют либо единицу в системе СИ микротесла (мкТл), либо гаусс (Гс, система СГС): , [Радиолоцман]).
Итак, что такое LSB и как его посчитать? Инструкция по добыче
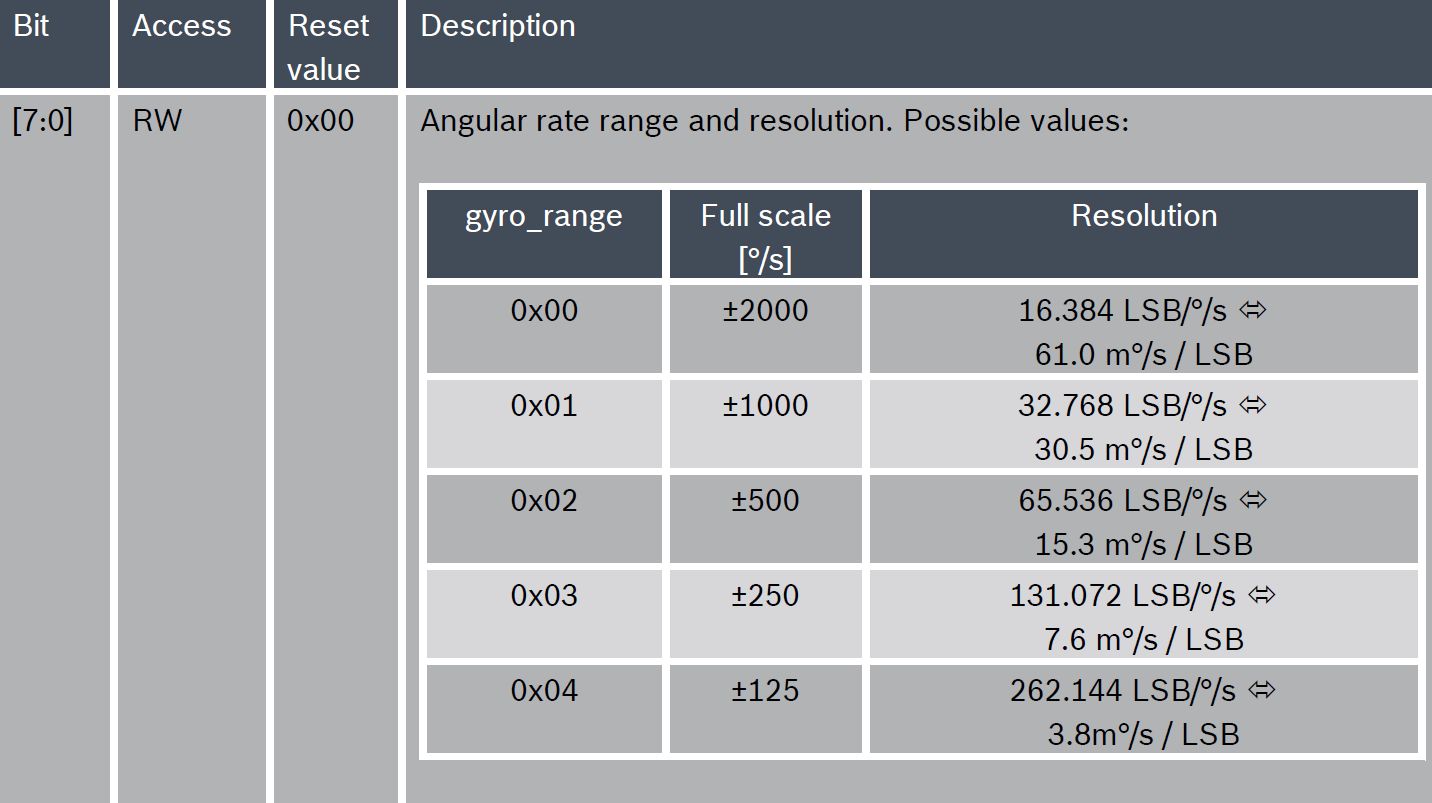
Допустим, наш акселерометр сейчас работает в диапазоне измерений , то есть полный размах возможных значений будет . Соответствующие им значения напряжений оцифровываются 16-битным АЦП, который может разбить весь интервал максимально на ступеней. Минимальный инкремент, который можно засечь, — это как раз одна ступенька . Тут надо помнить, что счёт ведётся с нуля, так что на самом деле максимально измеряемое значение будет . То есть, чем больше бит в цифровом слове АЦП или ЦАП, тем меньше будет расхождение. При этом чувствительность (иногда называется масштабным коэффициентом, sensitivity scale factor) датчика на конкретном диапазоне будет определяться как соотношение электрического выходного сигнала и механического воздействия. Традиционно указывается для частоты сигнала 100 Гц и температуры Для MPU-9250 чувствительность составляет ступеней на каждые g или (, ), для другого IMU, BMI088 от Bosch Sensortec, чувствительность гироскопа высчитывается так же, а для акселерометра используется ступеней на каждое g.
Варианты FS вытаскиваем из спецификации на гироскопы и, чтобы дважды не вставать, акселерометры.

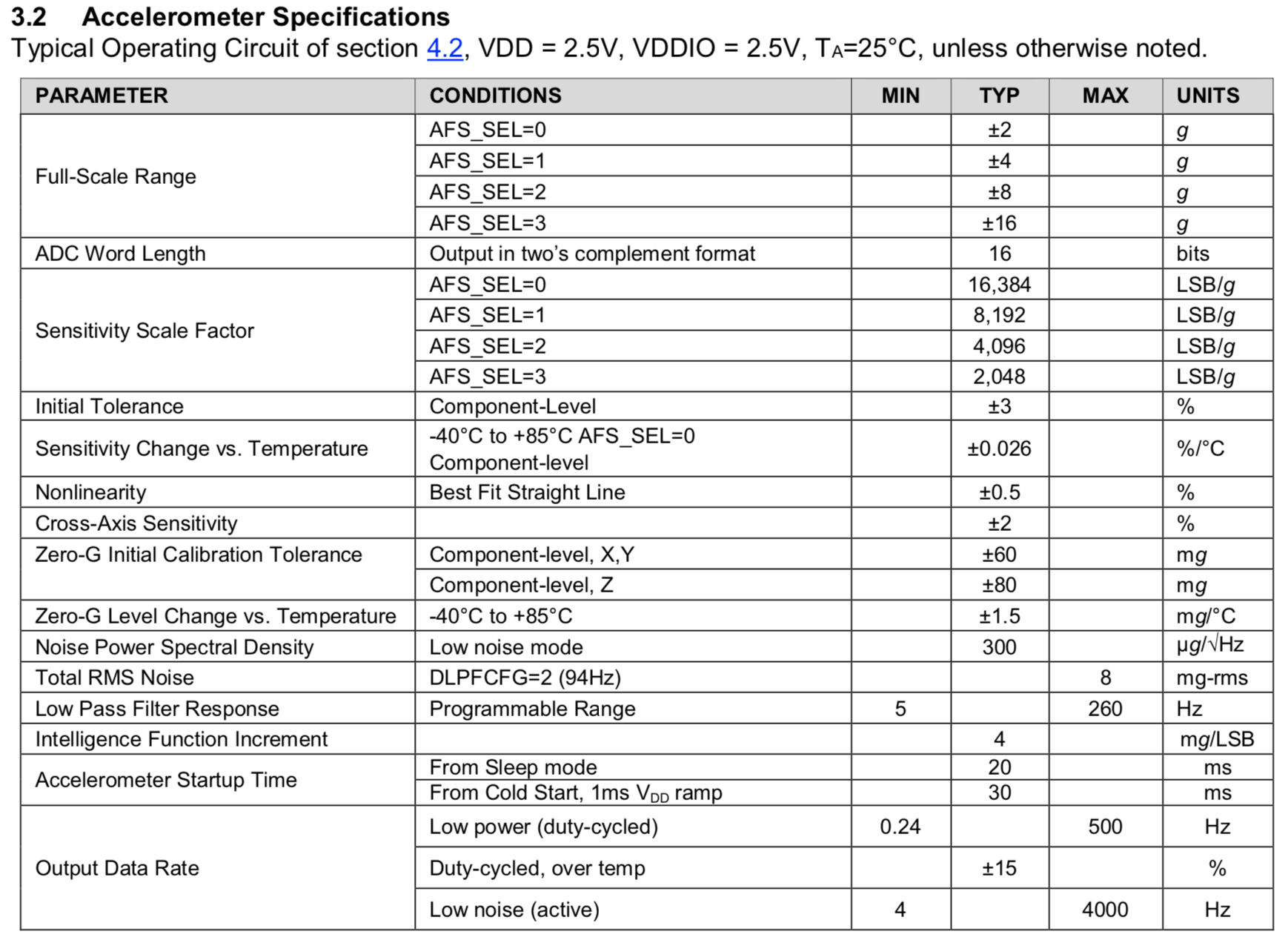
FS для акселерометров я брала ещё и из документации на BMI088 (см. ниже).
| Гироскоп, 16 бит | Акселерометр, 16 бит | ||
|---|---|---|---|
| Диапазон (FS), (dps) | LSB, (dps) | Диапазон (FS), g | LSB, mg |
| (FS = 250) | 0,004 | (FS = 4) | 0,06 |
| (FS = 500) | 0,008 | (FS = 6) | 0,09 |
| (FS = 1000) | 0,0015 | (FS = 8) | 0,12 |
| (FS = 2000) | 0,03 | (FS = 12) | 0,18 |
| (FS = 4000) | 0,06 | (FS = 16) | 0,24 |
| (FS = 24) | 0,37 | ||
| (FS = 32) | 0,48 | ||
| (FS = 48) | 0,73 | ||
Всё, вроде бы, встало на свои места, можно идти дальше. В некоторых случаях (ниже, например, вырезка из документации на BMI088) отдельно указывается такой параметр, как разрешение (Resolution).
По факту, вроде бы, получается, что это должен быть LSB. Но почему тогда мы видим одно значение вместо нескольких, завязанных на конкретные диапазоны? Пришлось расширять список исследуемых источников в поисках ответов.

Что такое разрешение (Resolution)?
Минимальная величина, которую достоверно видит датчик, крайне важная при попытке соблюсти баланс между ценой и производительностью. Это не точность — сенсор с высоким разрешением может быть не особо точным, равно как и сенсор с малым разрешением в определённых областях может обладать достаточной точностью. К сожалению, LSB определяет лишь теоретическое минимально-различимое значение при условии, что мы можем использовать все 16 бит АЦП. Это разрешение в цифровом мире. В аналоговом какая-то часть ступеней будет зашумлена и число эффективных бит будет меньше.
Какие бывают характеристики шума и откуда что берётся?
Источники шума можно в общем разбить на электронный шум схемы, преобразующей движение в сигнал напряжения (джонсоновский тепловой шум, дробовой шум, розовый 1/f фликкер-шум и т.д.), и тепловой механический (броуновский, обусловленный наличием мелких подвижных частей) от самого сенсора. Характеристики последнего будут зависеть от резонансной частоты механической части системы (собственной частоты колебаний сенсора ).
Среднеквадратичное значение шумов во всём спектральном диапазоне — Total RMS (Root mean square) Noise
Ускорения или угловые скорости вращения меньше уровня широкополосного шума будут неразличимы — вот и фактическое разрешение. Среднеквадратичное значение переменного напряжения или тока (часто называется действующим или эффективным) равно величине постоянного сигнала, действие которого произведёт такую же работу в активной (резистивной) нагрузке за время периода. Наиболее эффективен такой подход при оценке широкополосного шума, где доминирует белый шум.
Для белого шума отношение амплитуды (мгновенного пикового значения) к среднеквадратчному с вероятностью 99.9% составляет Называется такое отношение крест-фактором (crest factor, cross ratio). Можно выбрать вероятность 95.5% — крест фактор будет равен 4.

На деле же сигналы шума ведут себя не так хорошо и могут выдавать пики, увеличивающие крест-фактор до 10 раз. В некоторых спецификациях можно найти значения или сам множитель.
В узкой низкочастотной полосе 0.1-10 Гц основную роль играет фликкер-шум “1/f”, для оценки которого используют значение размаха шумового сигнала (peak-to-peak).
Спектральная плотность
Мощность – скорость поступления энергии. Через энергию определяются детерминированные и непериодические сигналы. Периодические и случайные сигналы выражаются через мощность, поскольку они не ограничены по времени и, соответственно, энергии, при этом в любой момент времени их средняя мощность отлична от нуля
Можно вспомнить [Sklyar], что произвольный периодический сигнал выражается через комбинацию бесконечного числа гармоник с возрастающими частотами:
что после представления косинуса и синуса в экспоненциальной форме
и замены можно записать в виде
где комплексные коэффициенты (спектральные компоненты) ряда Фурье для ,
В общем случае эти коэффициенты представимы следующим образом:
Амплитудным и фазовым спектром называют графики зависимости и от частоты. Спектральная плотность мощности периодического сигнала даёт распределение мощности сигнала по диапазону частот:
и имеет размерность Средняя нормированная мощность действительного сигнала будет
Непериодические случайные сигналы (в частности, шум) можно описать как периодические в предельном смысле. Если стремится к бесконечности, последовательность импульсов превращается в отдельный импульс , число спектральных линий стремится к бесконечности, график спектра превращается в гладкий спектр частот Для данного предельного случая можно определить пару интегральных преобразований Фурье
Спектральная плотность мощности случайного сигнала определяется через предел
и описывает распределение мощности сигнала в диапазоне частот.
Поскольку мы предполагаем, что среднее для белого шума датчиков в неподвижном состоянии равно нулю (), то квадрат среднеквадратического значения равен дисперсии и представляет собой полную мощность в нормированной нагрузке:
Смотрим в спецификации — там на самом деле под именем спектральной плотности указан квадратный корень из неё с соответствующей размерностью или То есть значение RMS шума без указания полосы частот, на которой он считался (Bandwidth), бессмысленно.
Чуть подробнее про выбор полосы пропускания
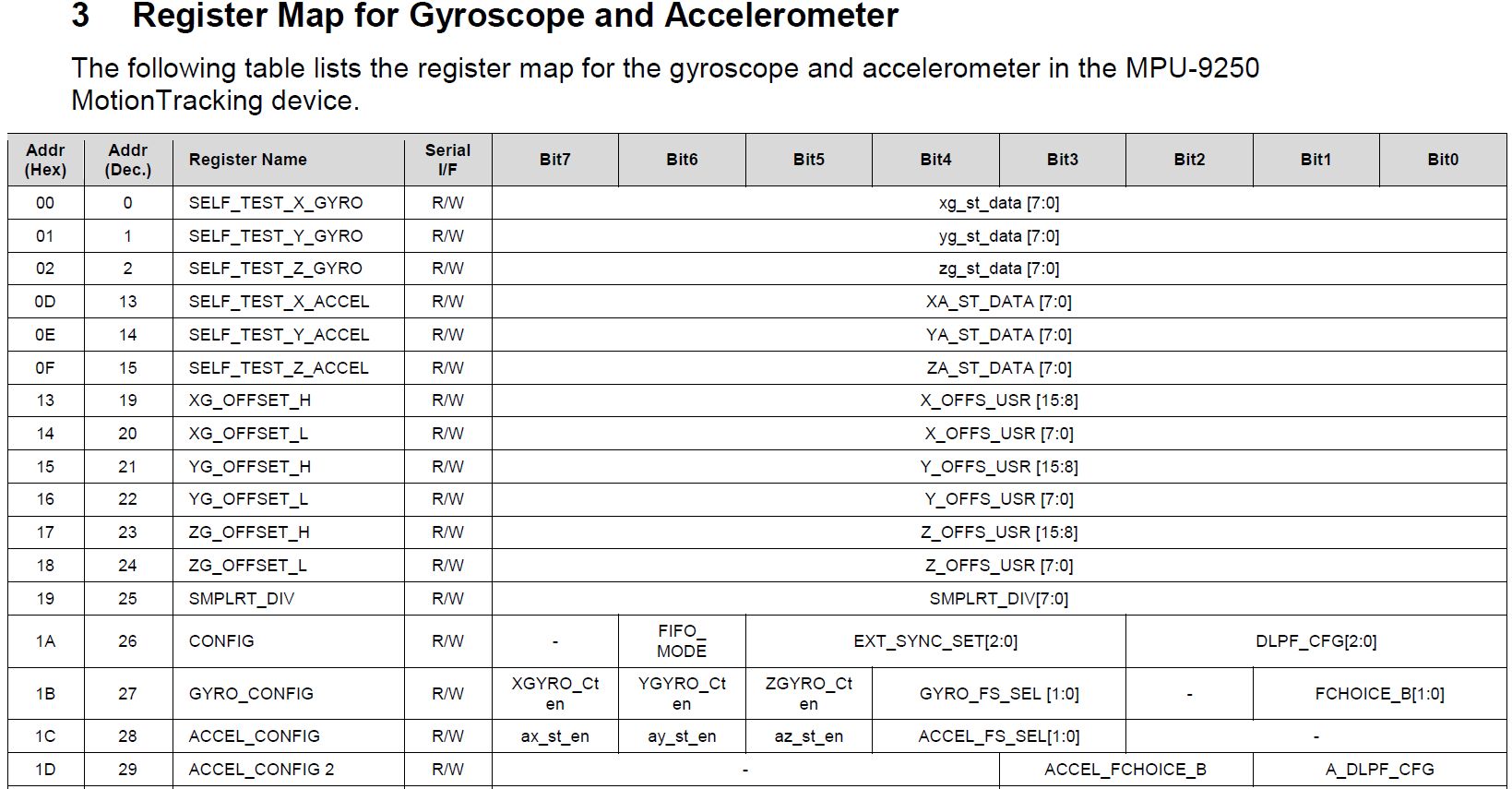
На выходе MEMS-датчика мы получаем сигналы разной частоты. Предполагается, что мы заранее имеем некое представление об измеряемых нами процессах. К примеру, при определении вектора ускорения дрона шумом являются вибрации аппарата. Отделить их от полезного сигнала можно с помощью фильтра низких частот, который обрежет все частоты выше указанной (к примеру, 200 Гц). MPU-9250 предоставляет возможность настроить частоту среза фильтра низких частот с помощью параметра с магическим названием DLPFCFG. Расшифровывается он как Digital Low Pass Filter Configuration. Далее в спецификации там и тут всплывали не менее загадочные выражения типа (DLPFCFG = 2, 92Hz), но за расшифровкой пришлось лезть в другой документ, “Register Map and Descriptions”. Там показано, какие наборы битов в какие регистры надо записать для достижения желаемых эффектов:
Опуская технические подробности конфигурирования, можно сказать следующее. В данном датчике осуществляется настраиваемая фильтрация показаний не только акселерометров, гироскопов, но и температурного датчика. Для каждого существует в общей сложности от 7 до 10 режимов, характеризующихся такими понятиями, как полоса пропускания (Bandwidth) в Гц, задержка в мс, частота дискретизации (sampling frequency, Fs) в кГц.

В таблицу режимов фильтра акселерометра добавилась колонка «Плотность шума» в , а “Bandwidth” колонка дополнилась значением “3dB”.
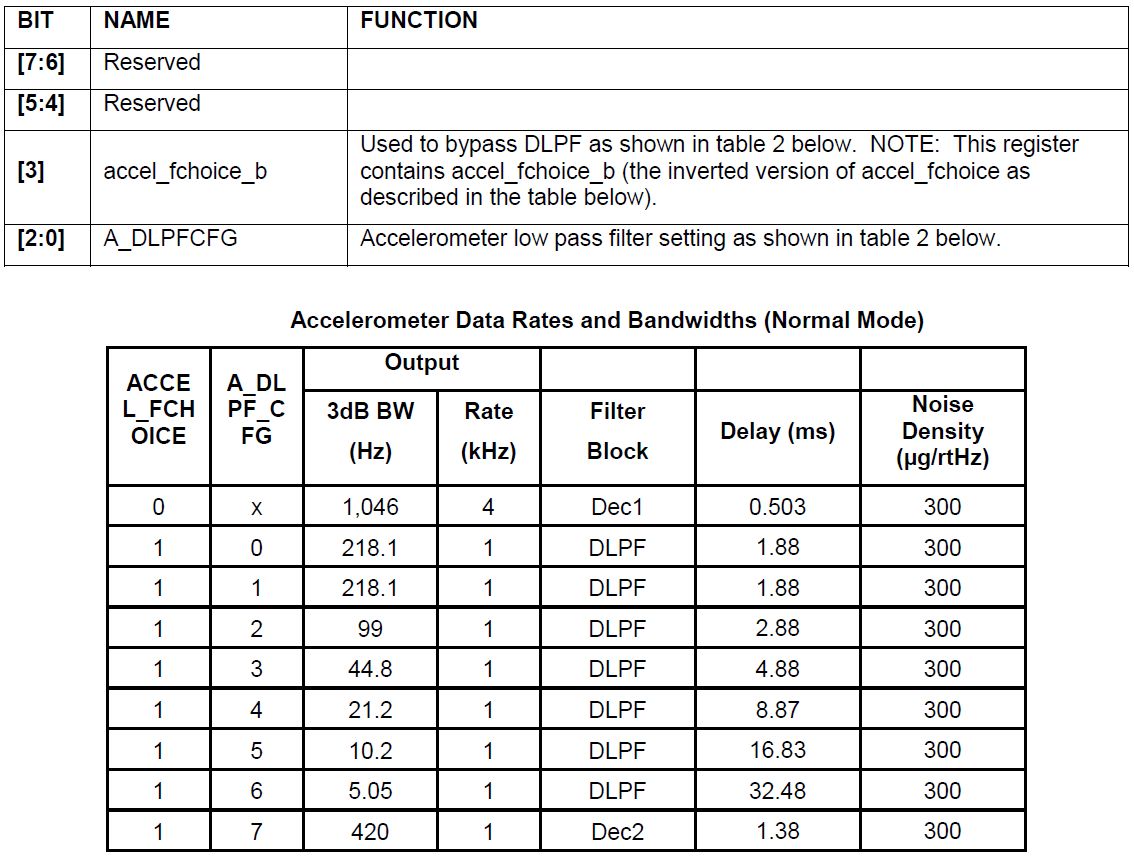
Легче не стало, так что пройдёмся прямо по списку.
Наследие Древнего Рима
Частота дискретизации + децимация -АЦП = скорость обновления данных (digital output data rate, ODR)
С частотой дискретизации (она же частота семплирования) всё понятно — это количество взятых за секунду точек непрерывного по времени сигнала при его дискретизации АЦП. Измеряется в герцах.
Для того, чтобы в выборку попало значение, приближенное к пиковой амплитуде сигнала, важно брать частоту дискретизации минимум в 10 раз больше частоты полезного сигнала. MPU-9250 предлагает три варианта Fs = 32kHz, 8kHz, 1kHz.
Но это абсолютно не значит, что сигнал на выходе акселерометра или гироскопа появляется с тем же периодом.
Если взять те же дроны, тут всё упирается в борьбу за снижение энергопотребления, повышение скорости вычислений и снижение шума выходных данных. Можно понизить частоту обновления данных на выходе, позволив внутренним алгоритмам интегрировать входную информацию в течение некоторого периода времени. Среднеквадратичный понизится, но также сузится и полоса пропускания (датчик сможет засечь лишь те процессы, частота которых будет меньше 50% скорости обновления данных).
Тут лучше сразу вспомнить теорему Котельникова. Она обещает, что при дискретизации аналогового сигнала можно избежать потерь информации (то есть восстановить сигнал без искажений), если частота полезного сигнала будет не больше половины частоты дискретизации, называемой также частотой Найквиста. На практике классический антиалайзинговый фильтр (фильтр низких частот, уменьшающий вклад побочных частотных компонентов в выходном сигнале до пренебрежимо малых уровней — ГОСТ Р 8.714-2010) требует в большинстве случаев разницу минимум в 2.5 раза [Siemens].
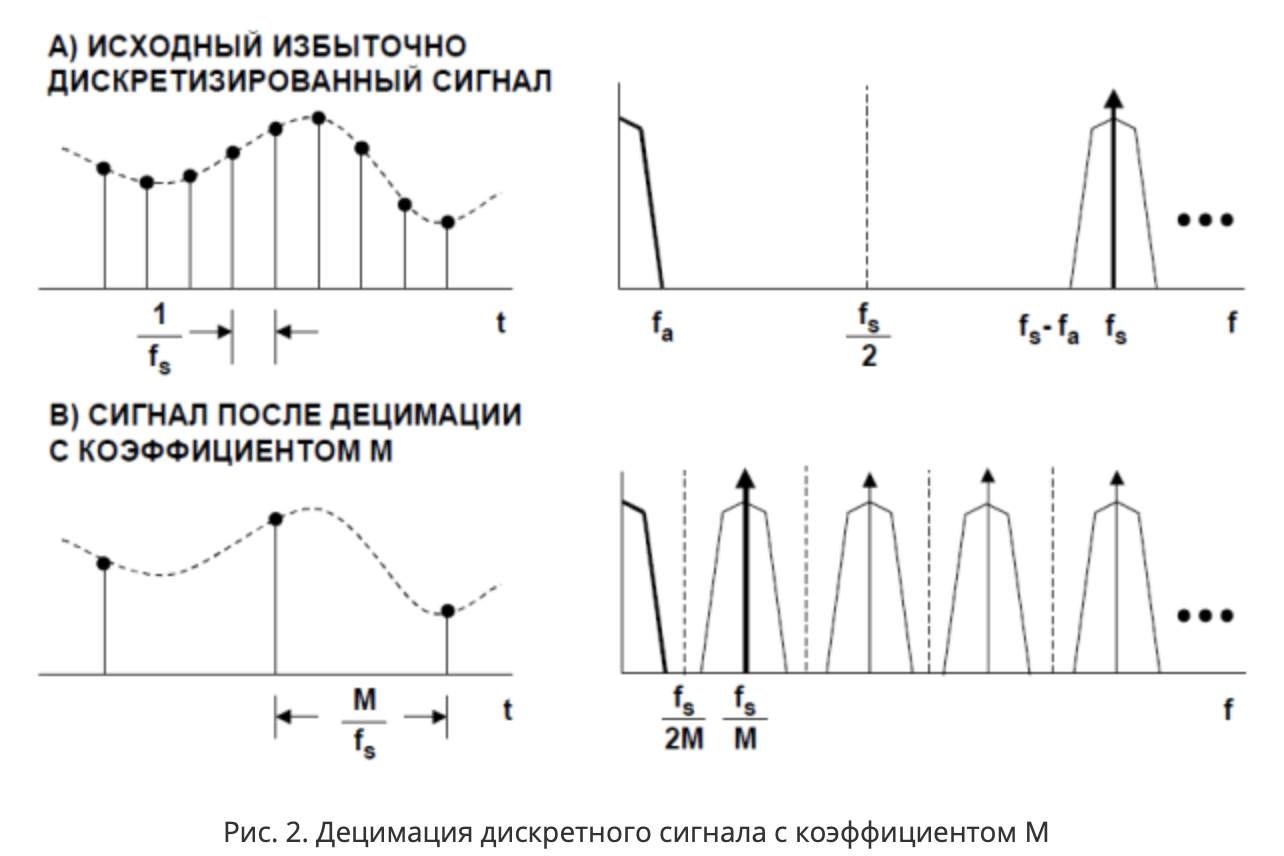
Для Fs = 32kHz частота Найквиста будет 16kHz. При этом полезный сигнал вряд ли выйдет за полосу fa = 20Hz (мало кто может менять направление движения чаще 20 раз в секунду). Итого, частота дискретизации значительно превышает частоту, требуемую для сохранения информации, содержащейся в полосе fa (40Hz, в 400 раз превышает), то есть полезный сигнал избыточно дискретизирован. Полоса между частотами fa и fs-fa не содержит никакой полезной информации. Можно уменьшить частоту дискретизации (на диаграмме это сделано с коэффициентом М, [7]), проредив последовательность семплов (отсчётов). Этот процесс и называется децимацией.
Согласно спецификации на MPU-9250, акселерометры снабжены сигма-дельта АЦП. Схемы на его основе потребляют минимальную мощность. Надо отметить, что полоса пропускания у данных преобразователей весьма узкая, не превышает звукового диапазона [Easyelectronics], но для штатного квадрокоптера больше и не нужно. Состоят они из двух блоков: -модулятора и цифрового децимирующего фильтра низких частот.
Зачем объединять фильтр низких частот и децимацию?
Честная выдержка из Вики:
Если исходный сигнал не содержит частот, превышающих частоту Найквиста децимированного сигнала, то форма спектра полученного (децимированного) сигнала совпадает с низкочастотной частью спектра исходного сигнала. Частота дискретизации, соответствующая новой последовательности отсчётов, в N раз ниже, чем частота дискретизации исходного сигнала.
Если исходный сигнал содержит частоты, превышающие частоту Найквиста децимированного сигнала, то при децимации будет иметь место алиасинг (наложение спектров).
Таким образом, для сохранения спектра необходимо до децимации удалить из исходного сигнала частоты, превышающие частоту Найквиста децимированного сигнала. В спецификации на MPU-9250 не очень много информации о характеристиках DLPF, но можно найти исследования энтузиастов [9].
Bandwidth, она же frequency response (частотный отклик)
диапазон частот, в котором датчик обнаруживает движение и выдает действительный выходной сигнал. В некоторых спецификациях приводится частотная характеристика датчика — зависимость электрического выходного сигнала акселерометра от внешних механических воздействий с фиксированной амплитудой, но различными частотами. В пределах полосы пропускания неравномерность частотной характеристики не превышает заданной. В случае применения цифрового фильтра низких частот выбор полосы пропускания как раз позволяет изменять частоту среза, неизбежно оказывая влияние на скорость отклика датчика на изменения положения в пространстве. Частота среза обязана быть меньше половины скорости оцифровки (digital output data rate, ODR), называемой также частотой Найквиста.
Для акселерометров MPU-9250 границы полосы пропускания определяются так, чтобы внутри диапазона спектральная плотность сигнала отличалась от пиковой (на частоте 0 Гц) не больше, чем на -3дБ. Этот уровень примерно соответствуют падению до половины спектральной плотности (или 70.7% от пиковой спектральной амплитуды). Напомню, для энергетических величин (мощность, энергия, плотность энергии), пропорциональных квадратам силовых величин поля, выраженное в децибелах отношение
.
Итог: сигналы, прошедшие через ФНЧ, менее зашумлены, у них лучшее разрешение, но при этом меньшая полоса пропускания. Поэтому указание разрешения в спецификации без привязки к полосе пропускания смысла не имеет.
Вернёмся к разрешению
В спецификации на MPU-9250 сведений о разрешении в принципе нет, для BMI088 под именем «Разрешение» представлены цифровое разрешение (LSB) и чувствительность»:
Оценить разрешение для каждой полосы пропускания можно по пиковому шуму Среднеквадратичная величина шума на выходе связана с указанной в спецификации спектральной плотностью (а вернее, корнем из неё) и эквивалентной шумовой полосой пропускания (equivalent noise bandwidth, ENBW, — полоса пропускания эквивалентной системы, имеющей прямоугольную АЧХ и одинаковые с исходной системой значение на нулевой частоте и дисперсию на выходе, при воздействии на входы систем белого шума):
А шумовая полоса пропускания связана с 3dB полосой коэффициентами, соответствующим порядку низкочастотного фильтра:
Судя по исследованию в [MPU9250_DLPF], наш выбор 1.57. Полученное среднеквадратическое значение учитывает вклад белого шума (ни шума квантования, ни механического шума там нет). Например, для акселерометра расчётное значение для получается . При этом в спецификации отдельно указан полный среднеквадратичный шум Расхождение значительное. К сожалению, он указан лишь для одной полосы, а для акселерометра BMI088 в спецификации указано только PSD. Так что будем использовать что есть. Кросс-фактор возьмём 4. Теперь самое интересное. Отношение даст примерный порядок эффективных бит на данном диапазоне измерений, который прилично меньше 16-битного разрешения АЦП.
| MPU-9250 | BMI088 | ||||
|---|---|---|---|---|---|
| Гироскоп | |||||
| 523 | 0.41 | 1.6 | |||
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| Акселерометр | |||||
| 218.1 | 5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | |||
Delay (ms), или откуда берётся задержка
Из необходимости сохранять во внутреннем буфере переменные для деления фильтром сигнала на разные частоты
Итого. Чем ниже частота обрезания фильтра, тем меньше шума в сигнале. Но тут надо быть осторожным, потому что одновременно с этим вырастает и задержка. Кроме того, можно пропустить полезный сигнал [8].
Электронный гироскоп принцип работы: МЭМС-гироскоп • Лаборатория Микроприборов • МЭМС технология
Примерно десять лет назад в мобильных устройствах появилась невероятная функция: вы поворачивали корпус устройства, и картинка на экране поворачивалась вслед за ним! Прошло совсем немного времени, и мы массово узнали слово «гироскоп», что это такое, как работает и какие его свойства. Кто еще не разобрался в данном вопросе, мы подробно расскажем в нашей статье.
- 1 Кто и когда изобрёл
- 2 Гиродатчики в смартфонах и планшетах
- 2.1 Калибровка
- 2.2 Как включить гиродатчик на Андроид
- 2.3 Как проверить, есть ли датчик в смартфоне
- 2.4 Что делать, если в смартфоне нет гироскопического прибора
Кто и когда изобрёл
Как часто бывает, изобретение это оказалось совсем не новым. В начале XIX века гироскоп изобрёл немецкий физик Иоганн Готтлиб Фридрих фон Боненбергер.
В середине XIX века изобретение Боненбергера доработал француз Фуко – тот самый, создатель знаменитого маятника. Тогдашние приборы использовали сложную систему механической балансировки массивного тела, чтобы оно оставалось на месте. А угол наклона тела по отношению к земной оси можно было измерить по изменению положений опор груза. Таким образом, прибор определял направление движения в пространстве через угол наклона к земной оси.
Принцип работы гироскопа в мобильном устройстве несколько иной: чтобы вписаться в миниатюрный чип, используются специальные конденсаторы, которые считывают смещение кристалла внутри чипа и так измеряют его отклонение от оси.
На сегодняшний день гироскоп в телефоне – вещь обязательная. До этого за определение положения отвечали одни только акселерометры – они худо-бедно справлялись, но, как оказалось, можно и лучше. Сегодня используются комбинированные модули из акселерометра и гироскопа, которые позволяют с высокой точностью отслеживать движения и посылать данные на обработку.

Гиродатчики в смартфонах и планшетах
Начиная с 2010 года, компания Apple снабдила iPhone 4 и последующие модели комбинацией из гироскопа и акселерометра. Такие комбинированные датчики очень хорошо отслеживают изменение положения смартфона или другого устройства (например, фитнес-трекера или умных часов). Чуть позже появился гироскоп в смартфоне на базе Андроид и планшете.
Теперь уже сложно представить себе устройство, не реагирующее на поворот. Наоборот, в моде тонкое управление. Например, вы можете рулить машиной в виртуальных гонках, просто вращая в руках телефон, как «баранку». Когда вы читаете книгу, экран может повернуться вправо или влево, и даже вверх ногами; но если вы выходите на рабочий стол телефона, поворот отключается. А вот планшет того же производителя и с той же версией ОС на поворот отреагирует и превратится в подобие ноутбука. И это только малая часть примеров тонкой настройки. В конце концов, в настройках можно вообще выключить и снова включить гироскоп на Андроиде, если в одних ситуациях он полезен, а в других мешает.

Калибровка
Датчик гироскопа в смартфоне – это ценнейший инструмент, но иногда он сбивается. К счастью, его можно откалибровать заново практически во всех актуальных моделях.
Калибровка гироскопа в Android делается с помощью соответствующих приложений. Чтобы откалибровать навигационный прибор на Андроид, лучше всего воспользоваться сторонним приложением. Дело в том, что разные производители используют несколько разные технологии и разные чипы, поэтому приложение, совместимое со всеми устройствами, должно быть независимым. Мы можем рекомендовать вам приложение Accelerometer Calibration Free. К сожалению, у него нет русскоязычного интерфейса, однако оно достаточно понятно и без перевода.
Apple, совершенно в своей манере, предполагает, что калибровка датчика в iPhone не нужна. Лукавит, конечно. Настроить гироскоп в айфоне бывает просто необходимо.
Для рекалибровки рекомендуют следующий сценарий действий:
- Перезагрузите (выключите и включите) iPhone.

- Запустите приложение «Компас».
- Если калибровка датчиков сбилась, приложение само запустит режим калибровки.
- Наклоняйте iPhone из стороны в сторону, пока круг калибровки не заполнится.
- Когда приложение покажет вам собственно компас, это означает, что прибор откалиброван.
Как включить гиродатчик на Андроид
Для того чтобы включить гироскоп на Андроид нужно выполнить следующие действия:
- Открыть верхнее меню (шторку) в телефоне
- Активировать «Автоповорот». В вашем смартфоне название может отличаться, например, «Книжный экран».
Как проверить, есть ли датчик в смартфоне
Как узнать, есть ли гироскоп в телефоне на Android? Это не сложно, следуйте нашим рекомендациям.
Скачивайте и устанавливайте любое из этих трех приложений, в которых можно посмотреть детально все датчики:
- AnTuTu
- Aida64
- Sensor Sense Toolbox
У смартфонов Apple проще, у всех моделей, начиная с iPhone 4 и выше, датчики гироскопа по умолчанию встроены в плату.

Так выглядит устройство гироскопа в смартфоне:
Что делать, если в смартфоне нет гироскопического прибора
Если нет гироскопа в телефоне, то есть три решения.
- Первый, самый верный, — это купить смартфон с нужным датчиком.
- Про второй и третий вариант смотрите подробное видео (при просмотре не обращайте внимание на голос и дикцию, досмотрите до конца и вы поймете, какой именно способ вам подойдет).
Гироскоп в часах и в фитнес-браслете
Гироскоп в часах – это один из важнейших элементов взаимодействия с миром. Когда вы поднимаете руку с носимым устройством, и в нем включается дисплей – это работает он, родимый. Когда новейшие Apple Watch распознают, что владелец упал и лежит без движения, и вызывают 911 – за спасение своей жизни хозяин должен сказать спасибо этому датчику. Также гироскоп отвечает за фитнес-функции, которые есть во всех современных моделях умных часов.

Он же помогает умному трекеру отследить, как вы ворочаетесь во сне, и оценить качество вашего сна. А более тонкое определение движений помогает распознавать разные виды спорта, которыми вы занимаетесь. Именно гироскоп в фитнес-браслете определяет количество сделанных вами шагов, по тому, как меняется ваше положение во время шага.
Гироскопы в других устройствах
Мы не берём в расчёт применение прибора в транспортных средствах или профессиональных системах навигации. Существуют и относительно небольшие устройства, в которых применяется навигационный прибор. Просто перечислим некоторые из них:
- Геймпады. Современные игровые приставки (Xbox, Playstation) оснащаются контроллерами, которые реагируют на наклон. Это придаёт управлению больше динамики.
- Механические часы. Назвать «массовыми» часики за полмиллиона долларов язык, конечно, не повернётся. Но увидеть, как циферблат в них принимает горизонтальное положение при любом повороте – бесценно.
- Сегвеи.
 Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Вывод
Хотя современные устройства от чистой механики перешли к электронике, принцип гироскопа всё равно остаётся актуальным. За последние годы мы оценили, как облегчают жизнь датчики поворота и движения. И, поверьте, чем умнее и подвижнее становится техника, тем важнее будут сенсоры движения и наклона.
- Была ли полезной информация ?
- ДаНет
что это, зачем он нужен, как работает —
Сохранить в закладкиСохраненоУдалено 0
Примерно десять лет назад в мобильных устройствах появилась невероятная функция: вы поворачивали корпус устройства, и картинка на экране поворачивалась вслед за ним! Прошло совсем немного времени, и мы массово узнали слово «гироскоп», что это такое, как работает и какие его свойства.

- 1 Кто и когда изобрёл
- 2 Гиродатчики в смартфонах и планшетах
- 2.1 Калибровка
- 2.2 Как включить гиродатчик на Андроид
- 2.3 Как проверить, есть ли датчик в смартфоне
- 2.4 Что делать, если в смартфоне нет гироскопического прибора
Кто и когда изобрёл
Как часто бывает, изобретение это оказалось совсем не новым. В начале XIX века гироскоп изобрёл немецкий физик Иоганн Готтлиб Фридрих фон Боненбергер.
В середине XIX века изобретение Боненбергера доработал француз Фуко – тот самый, создатель знаменитого маятника. Тогдашние приборы использовали сложную систему механической балансировки массивного тела, чтобы оно оставалось на месте. А угол наклона тела по отношению к земной оси можно было измерить по изменению положений опор груза.
 Таким образом, прибор определял направление движения в пространстве через угол наклона к земной оси.
Таким образом, прибор определял направление движения в пространстве через угол наклона к земной оси.Принцип работы гироскопа в мобильном устройстве несколько иной: чтобы вписаться в миниатюрный чип, используются специальные конденсаторы, которые считывают смещение кристалла внутри чипа и так измеряют его отклонение от оси.
На сегодняшний день гироскоп в телефоне – вещь обязательная. До этого за определение положения отвечали одни только акселерометры – они худо-бедно справлялись, но, как оказалось, можно и лучше. Сегодня используются комбинированные модули из акселерометра и гироскопа, которые позволяют с высокой точностью отслеживать движения и посылать данные на обработку.
Гиродатчики в смартфонах и планшетах
Начиная с 2010 года, компания Apple снабдила iPhone 4 и последующие модели комбинацией из гироскопа и акселерометра. Такие комбинированные датчики очень хорошо отслеживают изменение положения смартфона или другого устройства (например, фитнес-трекера или умных часов).
 Чуть позже появился гироскоп в смартфоне на базе Андроид и планшете.
Чуть позже появился гироскоп в смартфоне на базе Андроид и планшете.Теперь уже сложно представить себе устройство, не реагирующее на поворот. Наоборот, в моде тонкое управление. Например, вы можете рулить машиной в виртуальных гонках, просто вращая в руках телефон, как «баранку». Когда вы читаете книгу, экран может повернуться вправо или влево, и даже вверх ногами; но если вы выходите на рабочий стол телефона, поворот отключается. А вот планшет того же производителя и с той же версией ОС на поворот отреагирует и превратится в подобие ноутбука. И это только малая часть примеров тонкой настройки. В конце концов, в настройках можно вообще выключить и снова включить гироскоп на Андроиде, если в одних ситуациях он полезен, а в других мешает.
Калибровка
Датчик гироскопа в смартфоне – это ценнейший инструмент, но иногда он сбивается. К счастью, его можно откалибровать заново практически во всех актуальных моделях.
Калибровка гироскопа в Android делается с помощью соответствующих приложений. Чтобы откалибровать навигационный прибор на Андроид, лучше всего воспользоваться сторонним приложением. Дело в том, что разные производители используют несколько разные технологии и разные чипы, поэтому приложение, совместимое со всеми устройствами, должно быть независимым. Мы можем рекомендовать вам приложение Accelerometer Calibration Free. К сожалению, у него нет русскоязычного интерфейса, однако оно достаточно понятно и без перевода.
Apple, совершенно в своей манере, предполагает, что калибровка датчика в iPhone не нужна. Лукавит, конечно. Настроить гироскоп в айфоне бывает просто необходимо.
Для рекалибровки рекомендуют следующий сценарий действий:
- Перезагрузите (выключите и включите) iPhone.
- Запустите приложение «Компас».
- Если калибровка датчиков сбилась, приложение само запустит режим калибровки.
- Наклоняйте iPhone из стороны в сторону, пока круг калибровки не заполнится.
- Когда приложение покажет вам собственно компас, это означает, что прибор откалиброван.
Как включить гиродатчик на Андроид
Для того чтобы включить гироскоп на Андроид нужно выполнить следующие действия:
- Открыть верхнее меню (шторку) в телефоне
- Активировать «Автоповорот». В вашем смартфоне название может отличаться, например, «Книжный экран».
Как проверить, есть ли датчик в смартфоне
Как узнать, есть ли гироскоп в телефоне на Android? Это не сложно, следуйте нашим рекомендациям.
Скачивайте и устанавливайте любое из этих трех приложений, в которых можно посмотреть детально все датчики:
- AnTuTu
- Aida64
- Sensor Sense Toolbox
У смартфонов Apple проще, у всех моделей, начиная с iPhone 4 и выше, датчики гироскопа по умолчанию встроены в плату.
Так выглядит устройство гироскопа в смартфоне:
Что делать, если в смартфоне нет гироскопического прибора
Если нет гироскопа в телефоне, то есть три решения.
- Первый, самый верный, — это купить смартфон с нужным датчиком.

- Про второй и третий вариант смотрите подробное видео (при просмотре не обращайте внимание на голос и дикцию, досмотрите до конца и вы поймете, какой именно способ вам подойдет).
Гироскоп в часах и в фитнес-браслете
Гироскоп в часах – это один из важнейших элементов взаимодействия с миром. Когда вы поднимаете руку с носимым устройством, и в нем включается дисплей – это работает он, родимый. Когда новейшие Apple Watch распознают, что владелец упал и лежит без движения, и вызывают 911 – за спасение своей жизни хозяин должен сказать спасибо этому датчику. Также гироскоп отвечает за фитнес-функции, которые есть во всех современных моделях умных часов.
Он же помогает умному трекеру отследить, как вы ворочаетесь во сне, и оценить качество вашего сна. А более тонкое определение движений помогает распознавать разные виды спорта, которыми вы занимаетесь.
 Именно гироскоп в фитнес-браслете определяет количество сделанных вами шагов, по тому, как меняется ваше положение во время шага.
Именно гироскоп в фитнес-браслете определяет количество сделанных вами шагов, по тому, как меняется ваше положение во время шага.Гироскопы в других устройствах
Мы не берём в расчёт применение прибора в транспортных средствах или профессиональных системах навигации. Существуют и относительно небольшие устройства, в которых применяется навигационный прибор. Просто перечислим некоторые из них:
- Геймпады. Современные игровые приставки (Xbox, Playstation) оснащаются контроллерами, которые реагируют на наклон. Это придаёт управлению больше динамики.
- Механические часы. Назвать «массовыми» часики за полмиллиона долларов язык, конечно, не повернётся. Но увидеть, как циферблат в них принимает горизонтальное положение при любом повороте – бесценно.
- Сегвеи. Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Вывод
Хотя современные устройства от чистой механики перешли к электронике, принцип гироскопа всё равно остаётся актуальным.
 За последние годы мы оценили, как облегчают жизнь датчики поворота и движения. И, поверьте, чем умнее и подвижнее становится техника, тем важнее будут сенсоры движения и наклона.
За последние годы мы оценили, как облегчают жизнь датчики поворота и движения. И, поверьте, чем умнее и подвижнее становится техника, тем важнее будут сенсоры движения и наклона.- Была ли полезной информация ?
- ДаНет
Принцип работы, типы и применение
МЭМС или микроэлектромеханические системы в основном представляют собой микросистемы очень малого размера. Это чрезвычайно передовая технология, которая привела к появлению различных электронных компонентов, таких как акселерометр и датчик гироскопа. Акселерометр — это устройство, которое можно использовать для обнаружения негравитационного движения. С другой стороны, датчик гироскопа может использоваться для обнаружения гравитационного движения. Таким образом, мы видим, что датчик гироскопа и акселерометр дополняют друг друга. Оба эти компонента используются в различных современных устройствах. Каждый из них имеет множество приложений. В нашей статье мы подробно узнаем о датчиках гироскопа, их работе, типах и приложениях.

Определение: Гироскопический датчик — это устройство, которое использует силу земного притяжения для определения ориентации. Это тип датчика, который мы находим внутри IMU (инерциального измерительного блока). Гироскоп можно использовать для измерения вращения вокруг определенной оси. Устройство состоит из ротора, который представляет собой не что иное, как свободно вращающийся диск. Ротор установлен на оси вращения, которая находится в центре другого большего колеса.
Принцип работы датчика гироскопа
Сила Кориолиса или эффект Кориолиса используется для измерения углового момента. Датчик гироскопа работает по принципу сохранения углового момента. Он работает, сохраняя угловой момент. В гироскопическом датчике ротор или прялка закреплены на оси. Шарнир позволяет вращать ротор вокруг определенной оси, которая называется подвесом. Здесь мы будем использовать два стабилизатора одновременно. Один карданный подвес будет установлен на другой.
 Это даст ротору три степени свободы. Всякий раз, когда мы вращаем ротор гироскопа, гироскоп будет продолжать указывать в том же направлении.
Это даст ротору три степени свободы. Всякий раз, когда мы вращаем ротор гироскопа, гироскоп будет продолжать указывать в том же направлении.Поясним далее работу гироскопического датчика вибрации. Датчик вибрационного гироскопа состоит из двойного Т-образного структурного элемента. Имеется приводной рычаг, который вращается в определенном направлении. Приводные рычаги прикреплены к измерительным рычагам. При вращении гироскопического датчика вибрации эффект Кориолиса или сила Кориолиса начинают действовать на приводные рычаги. Вибрация приводных рычагов вызывает движение в паре измерительных рычагов гироскопа, что создает потенциал, отличный от угловой скорости, которая была обнаружена устройством. Затем мы можем преобразовать угловую скорость в электрические сигналы.
Типы датчиков гироскопа
В зависимости от размера и производительности датчики гироскопа бывают различных типов:
Кольцевой лазерный гироскоп
Кольцевой лазерный гироскоп в основном имеет кольцевой лазер.
 Второй кольцевой лазер имеет две встречно распространяющиеся резонансные моды на одном и том же пути, которые не зависят друг от друга. Разницу частот двух резонансных мод можно использовать для обнаружения вращения тел.
Второй кольцевой лазер имеет две встречно распространяющиеся резонансные моды на одном и том же пути, которые не зависят друг от друга. Разницу частот двух резонансных мод можно использовать для обнаружения вращения тел.Волоконно-оптический гироскоп
Волоконно-оптический гироскоп основан на эффекте Саньяка. Он работает по принципу интерференции света, проходящего через катушки оптического волокна. Мы вводим два луча света в оптическое волокно с двух противоположных направлений, и фазовый сдвиг можно измерить с помощью интерферометрии.
Квантовый гироскоп
Квантовый гироскоп также называют сверхтекучим гироскопом, и он постепенно заменяет механические гироскопы. Этот тип гироскопа использует жидкий материал для обнаружения изменения ориентации различных движущихся тел.
Вибрационный гироскоп
Вибрационный гироскоп является наиболее часто используемым датчиком гироскопа. Это также легкое устройство, которое довольно просто в использовании.
 В этом типе гироскопа вибрирующая структура может использоваться для определения скорости вращения движущихся тел. Вибрационный гироскоп имеет различные важные характеристики, такие как температурно-частотный коэффициент, масштабный коэффициент и многие другие.
В этом типе гироскопа вибрирующая структура может использоваться для определения скорости вращения движущихся тел. Вибрационный гироскоп имеет различные важные характеристики, такие как температурно-частотный коэффициент, масштабный коэффициент и многие другие.Датчик гироскопа в мобильных телефонах
Датчики гироскопа в наши дни стали неотъемлемой частью смартфонов. Все игры, в которые мы играем, используя датчики движения, основаны на датчике гироскопа. Одним из лучших примеров является очень популярная игра Pokemon Go, полностью основанная на принципе гироскопических датчиков. Нам также нужен гироскоп для просмотра 360-градусного видео на наших мобильных телефонах.
Гироскоп представляет собой интерактивный графический интерфейс, с помощью которого пользователи смогут выбирать параметры и меню, просто наклоняя свои телефоны. Гироскоп в мобильных телефонах также можно использовать для стабилизации изображения и GPS-инерциальной навигации.
Мобильное приложение Gyroscope Sensor
Мобильное приложение Gyroscope Sensor используется в тех смартфонах, которые не имеют встроенных гироскопических датчиков.
 Используя эти приложения, мобильный телефон сможет автоматически обнаруживать различные типы движения и на их основе; он выполнит необходимые действия.
Используя эти приложения, мобильный телефон сможет автоматически обнаруживать различные типы движения и на их основе; он выполнит необходимые действия.Большинство задач мобильного телефона можно выполнять, просто чувствуя движение. Одними из самых популярных мобильных приложений Android Gyroscope Sensor являются AndroSensor, Wifi Analyzer, Metal Sniffer и Clinometer. Также доступны различные приложения для iPhone, такие как iBeer, Sleep Time 9.0049 И виды на небо.
Области применения
Некоторые из наиболее важных применений гироскопического датчика :
Определение угловой скорости: Его можно использовать для определения скорости изменения углового движения движущихся тел. Это может быть использовано для обнаружения спортивных движений.
Углы обнаружения: Углы также можно определять с помощью датчика гироскопа. Это приложение используется в автомобильных навигаторах и игровых контроллерах.

Механизм управления датчиком: Мы также можем использовать гироскопический датчик для обнаружения вибрации, вызванной различными внешними факторами. Мы можем использовать это приложение для контроля дрожания камеры и управления транспортным средством.
Часто задаваемые вопросы
Для чего используется гироскоп?
Гироскоп обычно используется для измерения ориентации тел. Его можно использовать для измерения углового движения движущихся тел.
Что измеряет гироскоп?
Гироскоп обычно измеряет скорость изменения углового движения или ориентацию объектов. Он может измерять изменение углов движущихся тел.
Может ли гироскоп производить электричество?
Да, гироскоп может производить электричество. Он изменяет механическую энергию ротора на электрическую энергию.
Почему важен гироскоп?
Гироскоп считается чрезвычайно важным устройством из-за его способности измерять ориентацию.
 Он имеет ряд приложений, что делает его очень полезным устройством.
Он имеет ряд приложений, что делает его очень полезным устройством.Как стабилизируются гироскопы?
Гироскопы стабилизируются по принципу углового момента. Сила сопротивления используется для того, чтобы вернуть движущийся гироскоп в состояние покоя.
Перейдите по этой ссылке, чтобы узнать больше о WiFi Вопросы с ответами.
Итак, это все обзор датчика гироскопа. Как мы видим, этот датчик является одним из таких устройств, которое в последнее время используется в различных областях. Его можно использовать для определения движения, определения высоты, определения угла и многого другого. Это очень полезное устройство, которое значительно облегчило жизнь человеку. Вот вопрос к вам, какова основная функция датчика гироскопа?
ОШИБКА — 404 — НЕ НАЙДЕНА
- Главная
- Вупси-Дейзи
Наши серверные гномы не смогли найти страницу, которую вы ищете.
Похоже, вы неправильно набрали URL-адрес в адресной строке или перешли по старой закладке.

Возможно, некоторые из них могут вас заинтересовать?
Электролитические развязывающие конденсаторы — 100 мкФ/25 В
В наличии COM-00096
Избранное Любимый 10
LimeSDR
Нет в наличии WRL-15027
Избранное Любимый 9
МИКРОЭ СТСПИН233 Click
Нет в наличии РОБ-19540
Избранное Любимый 0
МИКРОЭ Высота 2 Нажмите
Нет в наличии СЕН-19988
Избранное Любимый 0
Enginursday: переключение датчиков с помощью адресного драйвера светодиодов WS2811
26 марта 2020 г.

Столкнувшись с непростой задачей соединения 192 одинаковых датчиков I2C, мы нашли творческое решение.
Избранное Любимый 0
Датчики Sensirion и коммутационные контакты
29 декабря 2020 г.
В рамках нашего недавнего партнерства с Sensirion мы хотели взглянуть на продукты и платы, которые мы предлагаем, а также на некоторые проекты и учебные пособия!
Избранное Любимый 0
БарсукХак
23 сентября 2015 г.
В этом руководстве показано, как паять свои интерактивные значки SparkFun, а также использовать их в других проектах.
Электронный гироскоп

Изобретение относится к области измерительной техники и может быть использовано в приборостроении и машиностроении для измерения угловой скорости. Гироскоп содержит пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП), отражающие структуры драйвера поверхностных акустических волн, а также электроды чувствительного элемента разности потенциалов, размещенные попарно за пределами ВШП на расстояниях, не меньших половины периода стоячих поверхностных акустических волн, и параллельно направлению распространения поверхностных акустических волн, по одному электроду каждой пары у одного из противоположных краев пластины пьезоэлектрика. Электроды, которые находятся ближе к одному и тому же краю пластины пьезоэлектрика, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены вдоль одной и той же пучности стоячей поверхностной акустической волны, но ближе к противоположным краям пластины пьезоэлектрика. Контактные шины могут быть размещены на ребрах жесткости, находящихся на краях пластины пьезоэлектрика и параллельных основному направлению распространения поверхностных акустических волн. Техническим результатом является повышение точности измерения угловой скорости. 1 з.п. ф-лы, 1 ил.
Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижными объектами, и предназначено для измерения угловой скорости в этих системах.
Известные волоконно-оптические гироскопы и лазерные гироскопы широко используются в инерциальной навигации и в системах наведения. Преимуществом этих гироскопов является достаточно высокая точность. Недостатком этих гироскопов является достаточно высокая стоимость и относительно большие габариты. К областям применения, требующим гироскопов менее дорогих и меньшего размера, относятся: системы автомобильной безопасности (системы против скольжения, системы камер), потребительские товары (видеокамеры, GPS, спортивное оборудование), промышленные товары (роботы, управление оборудованием), медицинские изделия (хирургические инструменты) [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283].
Известны микромеханические гироскопы на основе кремния [Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах / XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005. С.275-283]. Такие гироскопы представляют собой пластину, закрепленную на торсионах и совершающую вынужденные колебания на собственной резонансной частоте. Гироскоп приводится в колебательное движение путем подачи сигнала на драйвер (как правило, электростатический). При внешнем вращении микромеханического гироскопа возникает сила Кориолиса, создающая колебания относительно измерительной оси. При этом зазор между подвижной массой микромеханического гироскопа и основанием изменяется, что приводит к изменению расстояния между электродами и соответствующей емкости. Измеряя изменение величины емкости, можно определить изменение угловой скорости вращения микромеханического гироскопа.
Однако вышеуказанные гироскопы имеют низкую точность и низкую механическую прочность.
Известен также Виброгироскоп (патент РФ №2123219, H01L 41/08, 1998.12.10.), содержащий твердотельный элемент из сегнетоэлектрической керамики с размытым фазовым переходом, в виде монолитного стержня с крестообразным поперечным сечением, с двумя парами сплошных и двумя парами встречно-штыревых электродов. Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора.
Стабильность и помехоустойчивость позволяют применять виброгироскоп в компактных системах навигации и автоматического управления подвижными объектами.
Однако виброгироскоп имеет ограничения по рабочим характеристикам из-за принципа действия, который основан на вибрации подвешенных механических структур. Кроме того, эта подвешенная механическая структура очень чувствительна к внешним ударам и вибрации, т.к. она не может быть жестко присоединена к подложке из-за резонансной вибрации. Это ограничивает диапазон его применения.
Наиболее близким по технической сущности к изобретению является гироскоп [Патент US №6,516,665. «Микро-электро-механический гироскоп»/ Varadan V.K., Pascal B., Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V. Varandan. 2003].
Микро-электро-механический гироскоп включает в себя пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП) драйвера поверхностных акустических волн (ПАВ), ВШП чувствительного элемента колебаний ПАВ и отражающие структуры, расположенные за пределами встречно-штыревых преобразователей.
Принцип действия микро-электро-механического гироскопа основан на использовании поверхностной акустической волны, распространяющейся по пьезоэлектрической подложке. В отличие от других, этот гироскоп имеет планарную конфигурацию без подвешенных резонансных механических структур, вследствие чего является устойчивым и ударопрочным.
Недостатком микро-электро-механического гироскопа является низкая точность и соответственно невозможность использования его для высокоточных применений вследствие того, что электроды ВШП чувствительного элемента колебаний ПАВ неизбирательно воспринимают изменения пьезоэлектрических потенциалов, возникающие при действии разнонаправленных сил Кориолиса, соответствующих разнонаправленным движениям частиц пьезоэлектрической пластины, участвующих в формировании ПАВ. Вышеизложенные факты приводят к снижению чувствительности и точности оценивания угловой скорости, что и является недостатками прототипа.
Задачей настоящего изобретения является повышение чувствительности и точности при измерениях угловой скорости вращения с использованием пьезоэлектрических устройств.
Техническим результатом является повышение точности и чувствительности измерений.
Технический результат достигается тем, что в электронном гироскопе, содержащем пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, согласно изобретению за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях, между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один напротив другого, но ближе к противоположным краям пьезопластины, выполненной из пьезоэлектрика или пьезополупроводника.
Драйвер поверхностных акустических волн создает поверхностные акустические волны на поверхности пьезопластины, что является первичным вибрационным перемещением для этого гироскопа. Силы Кориолиса и первичные поверхностные акустические волны определяют вторичное вибрационное перемещение (вторичные поверхностные акустические волны) в направлении, ортогональном к направлению первичных поверхностных акустических волн. При этом силы Кориолиса, возникающие при наличии внешнего вращения основания гироскопа и приложенные к частицам пьезоэлектрика или пьезополупроводника, движущимся в одном направлении, противоположны по направлению силам Кориолиса, приложенным к другим частицам пьезоэлектрика или пьезополупроводника, в тот же момент времени на соседнем участке поверхностных акустических волн, движущимся в противоположном направлении.
В отличие от прототипа в электронном гироскопе измеряется не разность потенциалов, создаваемая под действием одновременно разнонаправленных сил Кориолиса всеми пучностями стоячей первичной ПАВ на электродах чувствительного элемента вторичной поверхностной акустической волны, а разность потенциалов, образованная под действием эффекта увлечения частиц пьезоэлектрика или пьезополупроводника одновременно однонаправленными силами Кориолиса, то есть при движении частиц пьезоэлектрика только вдоль тех участков первичной поверхностной акустической волны, которые находятся на расстояниях, кратных периоду поверхностных акустических волн, что позволяет повысить показатели чувствительности и точности при измерении угловой скорости пьезопластины.
Другим отличием от прототипа является то, что расстояния между электродами одной пары электродов чувствительного элемента разности потенциалов, образующими одну пару, примерно равны апертуре драйвера первичных поверхностных акустических волн, а не как у прототипа, у которого расстояния между электродами одной пары электродов встречно-штыревого преобразователя чувствительного элемента вторичной поверхностной акустической волны соответствуют четверти длины волны вторичной поверхностной акустической волны в той ее части, которая распространяется за пределами апертуры встречно-штыревого преобразователя драйвера первичных поверхностных акустических волн.
Технический результат достигается за счет того, что разности потенциалов вдоль одного из участков первичной поверхностной акустической волны образуются в некоторые моменты времени только под действием однонаправленных сил Кориолиса, что обеспечивает увеличение амплитуды совокупной разности потенциалов на контактных шинах и, тем самым, повышение точности и чувствительности измерений по сравнению с прототипом.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства, отсутствуют, следовательно, заявленное изобретение соответствует условию «новизна».
В настоящее время автору не известны гироскопы, которые имели бы такую высокую чувствительность и динамический диапазон, подходящий для многих промышленных применений, которые обеспечивает предлагаемая конструкция гироскопа.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует «изобретательскому уровню».
Сущность изобретения поясняется чертежом, где представлена схема электронного гироскопа.
Электронный гироскоп состоит из основания и выполненных на нем встречно-штыревых преобразователей и отражающих структур.
Основанием электронного гироскопа на ПАВ служит прямоугольная пьезопластина 1, выполненная из пьезоэлектрика или пьезополупроводника, например из кварца, ниобата лития или из CdS, CdSe, слоистой структуры LiNbO3 — Si соответственно [1].
На двух противоположных краях поверхности прямоугольной пьезопластины 1 в направлении распространения первичной ПАВ сформированы отражающие структуры 4 и ВШП 5 драйвера ПАВ, а в ортогональном направлении по обе стороны от апертуры драйвера ПАВ вдоль направления распространения первичной ПАВ сформированы электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 с контактными шинами 2 в соответствующей последовательности.
Отражающие структуры 4 расположены за ВШП 5 драйвера ПАВ, а электроды чувствительного элемента разности потенциалов 6, поглотители акустических колебаний 3 и контактные шины 2 — между другими двумя противоположными краями пьезопластины 1 вдоль направления распространения первичной ПАВ. Поглотители акустических колебаний 3 выполняют функции поглощения ПАВ так, чтобы поверхность пьезопластины 1 за поглотителями акустических колебаний была нечувствительной к ПАВ, создаваемым ВШП 5 драйвера ПАВ, что позволяет аккумулировать на одной контактной шине потенциалы, одновременно сформированные на электродах чувствительного элемента разности потенциалов 6 под действием сил Кориолиса одного направления.
Устройство работает следующим образом. На ВШП 5 драйвера ПАВ от внешнего генератора (не показан) подается электрический сигнал с заданной частотой. Если пьезопластина 1 выполнена из ниобата лития, то электрический сигнал может иметь частоту около 1 ГГц.
Первичные ПАВ создаются на пьезопластине 1 встречно-штыревыми преобразователями 5 драйвера ПАВ и отражающими структурами 4. Поверхностные акустические волны распространяются по пьезопластине 1 в области, ограниченной поглотителями акустических колебаний 3. Распространяясь дальше, первичная ПАВ взаимодействует с отражающими структурами 4.
При появлении внешнего вращения основания гироскопа к вибрирующим заряженным частицам материала пластины пьезоэлектрика 1 прикладываются силы Кориолиса. Напряжение на контактных шинах обусловлено поперечным акустоэлектрическим эффектом, возникающим под действием сил Кориолиса [3].
В результате действия сил Кориолиса вибрирующие заряженные частицы материала пластины пьезоэлектрика 1 смещаются в направлении действия силы Кориолиса, изменяя распределение электрического потенциала. Так возникает разность потенциалов между электродами чувствительного элемента разности потенциалов 6, размещенными у противоположных краев пластины пьезоэлектрика.
Вибрирующие частицы материала пластины пьезоэлектрика 1, смещенные вследствие действия сил Кориолиса, через электроды 6 изменяют потенциалы на контактных шинах 2. Разность потенциалов между контактными шинами 2 является высокочастотным сигналом и может быть измерена, например, анализатором спектра [1].
Для обеспечения возможности суммирования на контактных шинах 2 разностей потенциалов одного знака между электродами 6 и контактными шинами 2 наносится слой поглотителя акустических колебаний 3 или контактные шины размещаются на ребрах жесткости (не показаны), нечувствительных к колебаниям поверхности пьезоэлектрической пластины. В качестве поглотителя акустических колебаний 3 могут использоваться резиноподобные клеи различных марок.
По разности потенциалов между контактными шинами 2 судят о величине угловой скорости вращения пластины пьезоэлектрика 1. Угловую скорость определяют, например, по градуировочной характеристике гироскопа. При отсутствии внешнего вращения основания гироскопа силы Кориолиса не возникают, поэтому не возникает и разность потенциалов между контактными шинами 2, которая в этом случае практически равна нулю.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполнены следующие условия:
— средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в приборостроении, а именно в системах навигации динамических объектов, в системах управления, в том числе в автомобильной промышленности и робототехнике;
— для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных и других известных до даты подачи заявки средств;
— средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности «промышленная применимость».
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990.
2. Физическая акустика / Под ред. У.Мэзона. М.: Мир, 1969.
3. Кмита А.М., Медведь А.В. Поперечный акустоэлектрический эффект в слоистой структуре LiNbO3 — Si. «Письма ЖТФ»б, 1971, т.14, в.8, с.455.
1. Электронный гироскоп, содержащий пьезопластину, на которую нанесены встречно-штыревые преобразователи и отражающие структуры драйвера поверхностных акустических волн, отличающийся тем, что за пределами встречно-штыревых преобразователей драйвера поверхностных акустических волн параллельно направлению распространения поверхностных акустических волн дополнительно попарно, на расстояниях между двумя соседними парами электродов, не меньших половины периода поверхностных акустических волн, размещены электроды чувствительного элемента разности потенциалов, по одному электроду каждой пары у одного из противоположных краев пьезопластины, причем те из электродов каждой пары, которые находятся ближе к одному и тому же краю пьезопластины, электрически соединены под слоем поглотителя акустических колебаний с одной и той же контактной шиной, а находящиеся в одной паре электроды размещены один против другого, но ближе к противоположным краям пьезопластины.
2. Электронный гироскоп по п.1, отличающийся тем, что контактные шины размещены на ребрах жесткости, находящихся на краях пьезопластины и параллельных основному направлению распространения поверхностных акустических волн.