Руководство Диагностика шин данных CAN: Описание дефектов шины 500kbps
Общие указания
Все представленные изображения действительны при соблюдении следующих условий:
— Канал "А" ( жёлтый цвет ) DSO подключается к проводу High шины CAN
— Канал "В" ( зелёный цвет ) DSO подключается к проводу Low шины CAN
— Массовые провода каналов "А" и "В" всегда подключены к массе автомобиля
Изображения для примера сделаны на автомобиле Audi Q7
Изображения реальных дефектов, как и их воздействие на автомобиль, могут отличаться от представленных в этом пособии.
Нормальный вид сигнала шины
Обрыв провода (пример: обрыв провода High)
КЗ провода на плюс (пример: КЗ провода High)
КЗ провода на массу (пример: КЗ провода Low)
КЗ проводов между собой
Перестановка проводов
Периодически уровни напряжения в канала High и Low меняются местами. Дефект проявляется немедленно после перестановки проводов.
Для некоторых автомобилей, например Audi Q5, данный дефект возможно не будет виден, так как БУ управляются через шину и при таком дефекте отключаются.
Can шина как найти обрыв
Поскольку все современные автомобили имеют несколько конфигураций шин данных, диагносты и автоэлектрики сталкиваются все чаще с неисправностями, связанными именно с передачей данных. Как правило, симптомом может быть отсутствие коммуникации с каким-то блоком, повторяющиеся «U» коды в нескольких блоках, относящихся к одной шине. Это может сопровождаться многочисленными активными лампами неисправностей на панели приборов.
Сегодня мы будем обсуждать неисправности шины CAN. Существует несколько способов определения ее целостности и нормальной коммуникации. Удобнее всего это делать осциллографом. Но не все осциллографы настолько быстры, чтобы читать пакеты в шинах данных. Некоторые сканеры также имеют встроенную функцию проверки целостности CAN шины, например, G-scan 3:
В этой статье мы расскажем о быстром способе диагностики CAN шины с помощью мультиметра через диагностический разъём. Он занимает немного времени и в любом автосервисе всегда есть мультиметр. Итак, пошаговая инструкция:
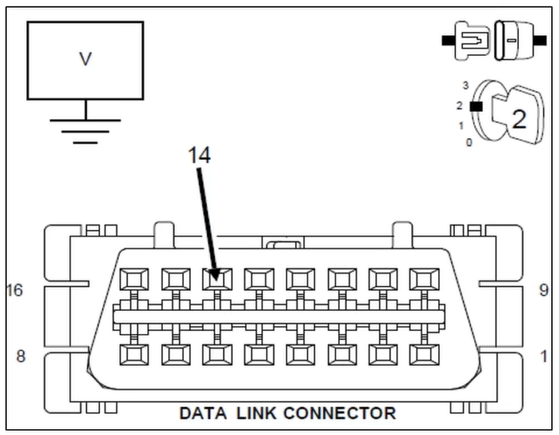
ШАГ 1: «Проверка Низкоскоростной CAN Шины на замыкание»:
Отключаем сканер от розетки. Переводим ключ зажигания в положение 2 (ВКЛ). С помощью мультиметра измеряем напряжение (ПИН 14 на розетке и ЗЕМЛЯ). Есть ли у нас напряжение 10,0 вольт?
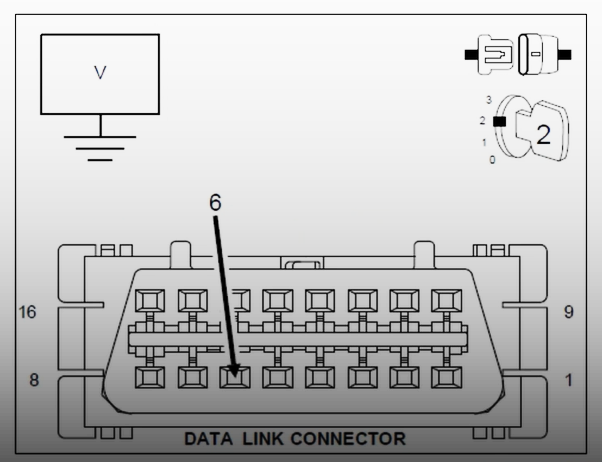
ШАГ 2: «Проверка Низкоскоростной CAN Шины на замыкание на землю»:
Находим ПИН 6 на розетке и второй шуп осциллографа подключаем к плюсовой клемме АКБ. Есть ли у нас 0 вольт? Если мы находим тут 0 вольт, то начинаем отключать модули по одному, пока не появится напряжение. Если оно так и не появилось, то проблема в проводке CAN шины и необходимо определить место предполагаемого замыкания и поменять витую пару.
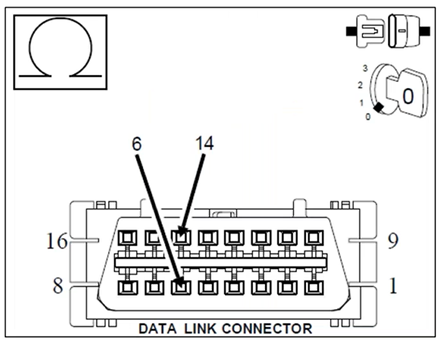
ШАГ 3: «Проверка терминирующих сопротивлений»:
Выключаем зажигание. Отключаем минусовую клемму аккумулятора. Переводим мульттимтер в режим измерения сопротивления и измеряем Сопротивление между высокой и низкой CAN шинами (между ПИНами 6 и 14). Получается ли сопротивление в диапазоне 53,5 — 67 Ом? Если ДА, то тест завершен. Если проблема остаётся, то значит она отсутствует на момент измерения и носит спорадический характер. Обратитесь к электросхеме автомобиля, проверьте коннекторы и другие элементы проводки на наличие окисления коннекторов, перегибов, старых отверстий от накола щупом осциллографа, возможности проникновения воды или коррозии. Проверьте целостность мест соединения. Если сопротивление не в диапазоне 53,5 — 67 Ом, то перейдите к следующему шагу.
ШАГ 4: «Высокое сопротивление цепи — более 67 Ом»:
Если измеренное сопротивление выше 67 Ом, то у нас высокий сигнал цепи CAN HIGH или LOW, её разрыв или один из терминирующих резисторов внутри ЭБУ поврежден. Если у нас низкое сопротивление цепи (ниже 53,5 Ом), то перейдите к следующему шагу.
ШАГ 5: «Низкое сопротивление цепи — ниже 53,5 Ом»:
Если измеренное сопротивление ниже 53,5 Ом, то у нас замыкание цепи между CAN HIGH и LOW. Необходимо разбить шину на участки и продиагностировать их отдельно на наличие замыкания. Если после отключения одного из модулей сопротивление становится нормлаьным, значит замыкание внутри блока управления и его необходимо менять.
Другими продвинутыми методами диагностики всех видов шин данных Вы сможете овладеть на наших занятиях!
Школа Автодиагностики ИНЖЕКТОРКАР
Написать комментарий
Ваш комментарий: Внимание: HTML не поддерживается! Используйте обычный текст.
Введите код, указанный на картинке:
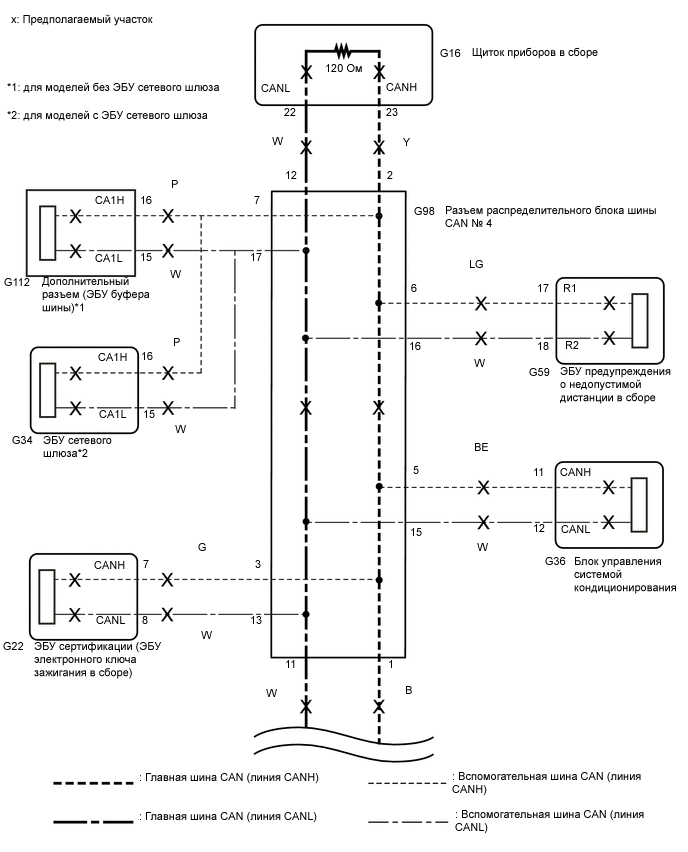
СИСТЕМА ПЕРЕДАЧИ ДАННЫХ CAN (для моделей с левосторонним рулевым управлением) Проверьте шины CAN на короткое замыкание
Между проводами главной шины V и/или вспомогательных шин CAN может быть короткое замыкание, если сопротивление между контактами 6 (CANH) и 14 (CANL) разъема DLC3 составляет менее 54 Ом.
Короткое замыкание в главной шине CAN
Короткое замыкание во вспомогательной шине CAN
ЭБУ рулевого управления с усилителем
Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи)
Датчик положения рулевого колеса
ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе)
Блок управления системой кондиционирования в сборе
ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе)
ЭБУ предупреждения о недопустимой дистанции
(для моделей с ЭБУ сетевого шлюза)
Дополнительный разъем (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
ЭБУ стояночного тормоза в сборе
Приемник системы навигации в сборе
(для моделей с приемником системы навигации)
Радиоприемник с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Разъем распределительного блока шины CAN № 3
Разъем распределительного блока шины CAN № 4
СХЕМА ЭЛЕКТРИЧЕСКИХ СОЕДИНЕНИЙ
ПРЕДОСТЕРЕЖЕНИЕ / ПРИМЕЧАНИЕ / УКАЗАНИЕ
Перед измерением сопротивления шины CAN, выключите зажигание и оставьте автомобиль в покое на 1 минуту или более, не приводя в действие ключ, любые другие переключатели и не открывая/закрывая двери. После этого, отсоедините провод от отрицательного (-) вывода аккумуляторной батареи и перед измерением сопротивления оставьте автомобиль в покое на 1 минуту или более.
После выключения зажигания следует подождать некоторое время, прежде чем отсоединять провод от отрицательного (-) вывода аккумуляторной батареи. Поэтому, прежде чем приступать к этой работе, обязательно ознакомьтесь с примечанием относительно отсоединения провода от отрицательного (-) вывода аккумуляторной батареи.
Так как порядок проведения диагностики важен для получения корректных результатов, начните поиск неисправностей с раздела «Порядок поиска неисправностей», если выводятся коды DTC, связанные с системой передачей данных CAN.
После ремонта выполните процедуру проверки кодов DTC и убедитесь, что коды DTC не выводятся снова.
Процедура проверки кодов DTC: Включите зажигание (IG), подождите не менее 61 с и затем двигайтесь на автомобиле со скоростью не менее 20 км/час (12 миль в час) в течение не менее 10 минут.
После ремонта выполните проверку шины CAN и убедитесь, что отображаются все ЭБУ и датчики, подсоединенные к системе передачи данных CAN.
Перед заменой главного ЭБУ кузова (бортового ЭБУ сети мультиплексной связи), ECM или ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) обратитесь к бюллетеню технического обслуживания.
Управление выключателем зажигания, какими-либо выключателями или дверями приводит к обмену данными между ЭБУ и датчиками по шине CAN. При осуществлении обмена данными сопротивление изменяется.
Если DTC регистрируется при непродолжительном движении на автомобиле даже после удаления кодов DTC, неисправность может возникать вследствие вибрации автомобиля. В подобных случаях необходимо пошевелить разъемы ЭБУ или жгутов проводов во время проверки, чтобы установить причину неисправности.
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЩИТОК ПРИБОРОВ)
Отсоедините провод от отрицательного (-) вывода аккумуляторной батареи.
Отсоедините разъем G16 щитка приборов.
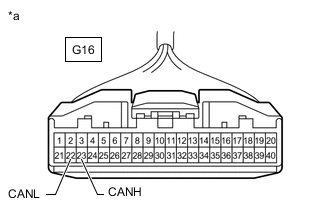
Вид спереди разъема со стороны жгута проводов:
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G16-23 (CANH) — G16-22 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
ЗАМЕНИТЕ ЩИТОК ПРИБОРОВ В СБОРЕ Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ECM)
Подсоедините разъем G16 щитка приборов в сборе.
Отсоедините разъем A53 ECM.
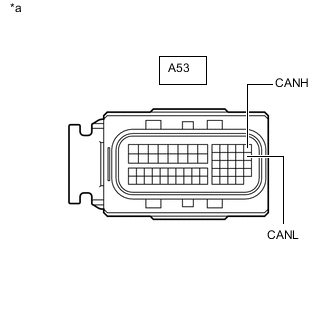
Вид спереди разъема со стороны жгута проводов:
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| A53-13 (CANH) — A53-26 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
ЗАМЕНИТЕ ECM Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
Подсоедините разъем A53 ECM.
Отсоедините разъем G98 распределительного блока шины CAN № 4.
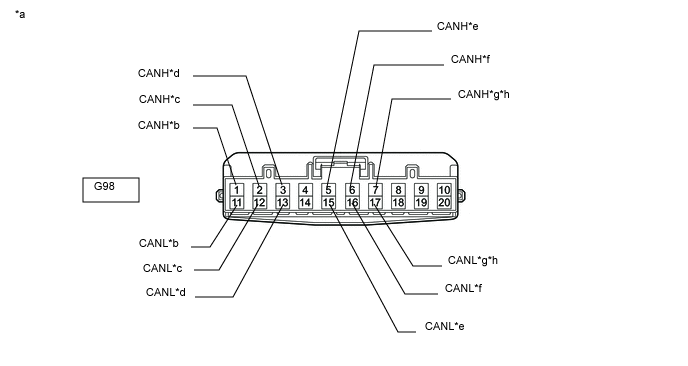
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 4)
(для моделей с ЭБУ сетевого шлюза)
к дополнительному разъему (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ЩИТОК ПРИБОРОВ — РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
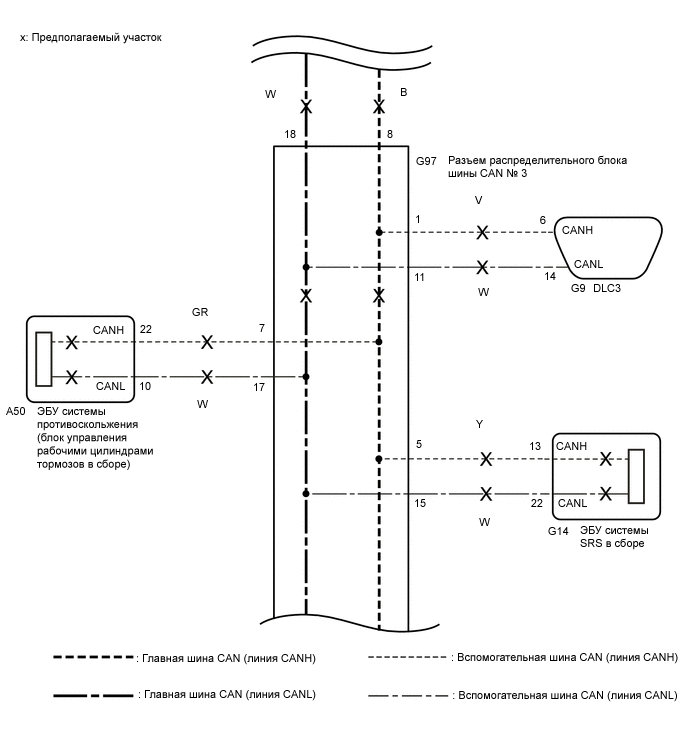
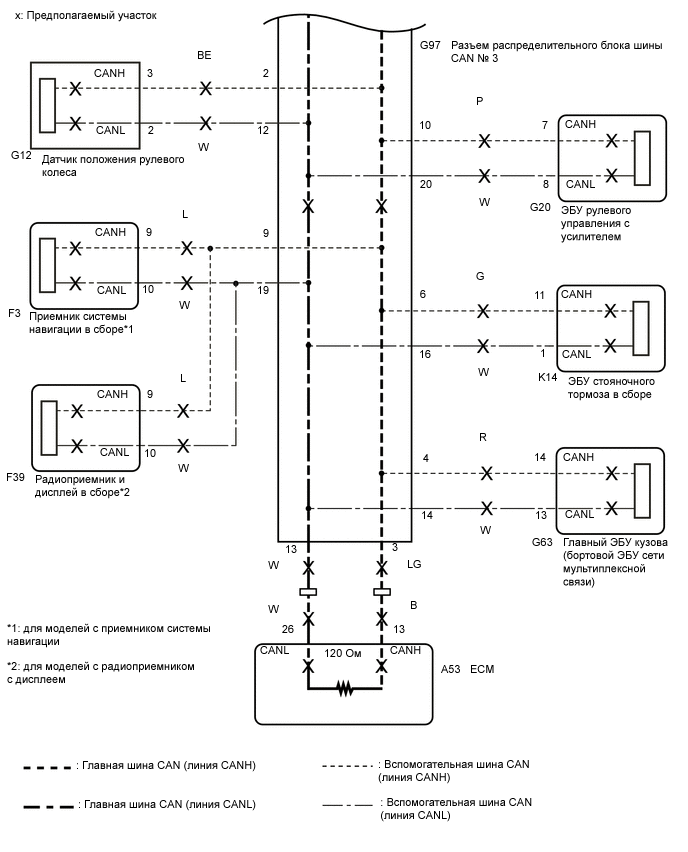
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
Отсоедините разъем G97 распределительного блока шины CAN № 3.
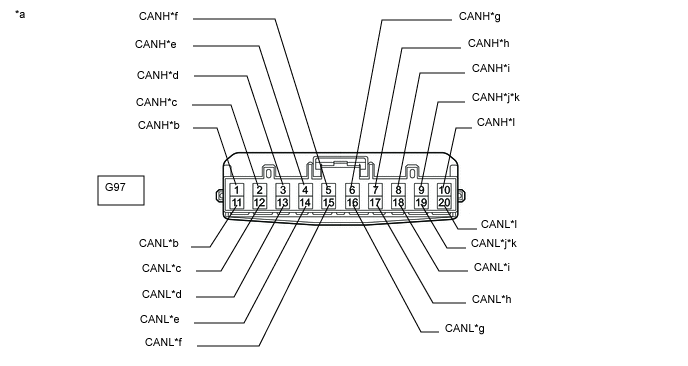
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 3)
К приемнику системы навигации в сборе
(для моделей с приемником системы навигации)
к радиоприемнику с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Подключение диагностического прибора | Условие | Заданные условия | Куда подсоединить |
|---|---|---|---|
| G97-1 (CANH) — G97-11 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | DLC3 |
| G97-2 (CANH) — G97-12 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Датчик положения рулевого колеса |
| G97-3 (CANH) — G97-13 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108 — 132 Ом | ECM |
| G97-4 (CANH) — G97-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи) |
| G97-5 (CANH) — G97-15 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы SRS в сборе |
| G97-6 (CANH) — G97-16 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ стояночного тормоза в сборе |
| G97-7 (CANH) — G97-17 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе) |
| G97-8 (CANH) — G97-18 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | Разъем распределительного блока шины CAN № 4 |
| G97-9 (CANH) — G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Приемник системы навигации в сборе*1 |
| G97-9 (CANH) — G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Радиоприемник с дисплеем в сборе*2 |
| G97-10 (CANH) — G97-20 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ рулевого управления с усилителем |
| Результат | Следующий шаг |
|---|---|
| OK | А |
| NG (главная шина распределительного блока шины CAN № 4) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (вспомогательная шина DLC3) | D |
| NG (главная шина ECM) | E |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ГЛАВНУЮ ШИНУ CAN ИЛИ РАЗЪЕМ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4 — РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНЫЕ ШИНЫ CAN, ПОДКЛЮЧЕННЫЕ К DLC3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ECM — РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА CAN № 3)
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЭБУ, ДАТЧИК)
Подсоедините все жгуты проводов.
Отсоедините разъем, содержащий контакты CANH и CANL, от ЭБУ (или датчика), к которому подсоединена замкнутая накоротко вспомогательная шина.
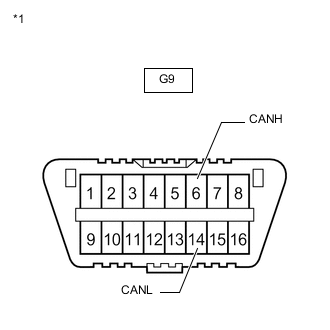
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G9-6 (CANH) — G9-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 54 — 69 Ом |
Если при отсоединении разъема от ЭБУ (или датчика) сопротивление стало нормальным (54–69 Ом), возможно короткое замыкание в ЭБУ (или датчике).
ЗАМЕНИТЕ СООТВЕТСТВУЮЩИЙ ЭБУ ИЛИ ДАТЧИК
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНУЮ ШИНУ ИЛИ РАЗЪЕМ СООТВЕТСТВУЮЩЕГО ЭБУ ИЛИ ДАТЧИКА
Проверка кан шины мультиметром

Блог
CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.

Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
Используемый кабель
Указания по проверке
- Проверка напряжения (осциллограф): Для проверки напряжения должна быть подсоединена АКБ и включено зажигание.
- Измерение сопротивления: При измерении сопротивления необходимо, чтобы измеряемый объект перед измерением был приведен в обесточенное состояние. Для этого отсоединяется аккумуляторная батарея. Подождать 3 минуты пока разрядятся все конденсаторы в системе.
Информация по шине CAN
Шина CAN (Controller Area Network) является последовательной системой шин связи и отличается следующими признаками:
- распространение сигнала происходит в обоих направлениях.
- Каждое сообщение принимают все абоненты шины. Каждый абонент шины сам решает, будет ли он использовать сообщение,
- Дополнительные абоненты шины добавляются простым параллельным включением.
- Шинная система образует систему с задающим устройством. Каждый абонент шины может быть задающим или исполнительным устройством, в зависимости от того, подключен ли он в качестве передатчика или приемника.
- В качестве средства передачи используется двухпроводное соединение. Обозначения проводов: низкий уровень CAN и высокий уровень CAN.
- Как правило, каждый абонент шины может поддерживать связь по шине со всеми другими абонентами шины. Обмен данными по шине регулируется по правилам доступа. Основным отличием между шиной передачи данных K-CAN (кузовная шина CAN), шиной PT-CAN (шина CAN двигателя и трансмиссии) и шиной F-CAN (шина CAN ходовой части)является:
- K-CAN: скорость передачи данных ок. 100 Кбит/с. Возможен однопроводной режим.
- PT-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
- F-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
Задающее устройство: задающее устройство является активным партнером по связи, от которого исходит инициатива связи. Задающее устройство имеет приоритет и управляет связью. Оно может посылать пассивному абоненту шины (исполнительному устройству) сообщения по системе шин и после запроса принимать его сообщения.
Исполнительное устройство: исполнительное устройство является пассивным участником связи. Оно получает команду получать и передавать данные.
Система с задающим устройством: в системе с задающим устройством участники связи могут в определенный момент времени брать на себя роль задающего или исполнительного устройства.
Осциллографирование K-CAN, PT-CAN, F-CAN
Для большей ясности, работает ли шина CAN безупречно, необходимо понаблюдать связь по шине. При этом нет необходимости анализировать отдельные биты, а нужно лишь убедиться, что шина CAN работает. Осциллографирование показывает: ”шина CAN очевидно работает без нарушений”.
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1 В и U макс = 5 В
Высокий уровень CAN относительно массы: U мин = 0 В и U макс = 4 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине K-CAN:
| CH1: | Щуп 1, ранг 2 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 2 В/дел; соединение DC |
| Время: | 50 мс/дел |
Рис. 1: Измерение K-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1,5 В и U макс = 2,5 В
Высокий уровень CAN относительно массы: U мин = 2,5 В и U макс = 3,5 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине PT-CAN (или F-CAN):
| CH1: | Щуп 1, ранг 1 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 1 В/дел; соединение DC |
| Время: | 10 мс/дел |
Рисунок 2: Измерение PT-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
Порядок измерения сопротивления с согласующим сопротивлением K-CAN, PT-CAN и F-CAN
- Шина CAN должна находиться в обесточенном состоянии
- Не должны быть подключены другие измерительные приборы (параллельное включение измерительных приборов)
- Измерение производится между проводами низкого уровня CAN и высокого уровня CAN
- Фактические значения могут отличаться от заданных значений на несколько Ом.
На шине K-CAN нельзя провести отдельное измерение сопротивления, так как сопротивление изменяется в зависимости от логики включения ЭБУ!
PT‐CAN, F‐CAN
Для предотвращения отражения сигнала два абонента шины CAN (с максимальным удалением в сети PT-CAN) нагружаются сопротивлением 120 Ом. Оба нагрузочных сопротивления включаются параллельно и образуют эквивалентное сопротивление 60 Ом. При отключенном напряжении питания это эквивалентное сопротивление можно измерить между линиями передачи данных. Кроме этого, можно по отдельности измерить отдельные сопротивления.
Указания по измерению с сопротивлением 60 Ом: Отсоединить от шины легкодоступный ЭБУ. Измерить сопротивление на разъеме между проводами CAN низкого и высокого уровней.
Указание!
Не на всех автомобилях имеется согласующее сопротивление на шине CAN Наличие встроенного согласующего сопротивления на подключенном автомобиле можно проверить по соответствующей электрической схеме.
Шина CAN не работает
Если шина передачи данных K-CAN или PT-CAN не работает, то, возможно, имеется КЗ или обрыв провода CAN высокого или низкого уровней. Или неисправен ЭБУ.
Для локализации причины неисправности рекомендуется действовать следующим образом:
- По очереди отсоединять абонентов шины CAN до тех пор, пока не будет найден блок, являющийся причиной неисправности (= ЭБУ X).
- Проверить провода к ЭБУ X на отсутствие КЗ или обрыва.
- При возможности проверить ЭБУ X.
- Такая последовательность действий приводит к успеху только в том случае, если короткое замыкание имеет проверяемый провод от ЭБУ к шине CAN. Если провод в шине CAN сам имеет короткое замыкание, то нужно проверить жгут проводов.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.
Между проводами главной шины V и/или вспомогательных шин CAN может быть короткое замыкание, если сопротивление между контактами 6 (CANH) и 14 (CANL) разъема DLC3 составляет менее 54 Ом.
Короткое замыкание в главной шине CAN
Короткое замыкание во вспомогательной шине CAN
Щиток приборов в сборе
ЭБУ рулевого управления с усилителем
Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи)
Датчик положения рулевого колеса
ЭБУ системы SRS в сборе
ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе)
Блок управления системой кондиционирования в сборе
ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе)
ЭБУ предупреждения о недопустимой дистанции
ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
Дополнительный разъем (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
ЭБУ стояночного тормоза в сборе
Приемник системы навигации в сборе
(для моделей с приемником системы навигации)
Радиоприемник с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Разъем распределительного блока шины CAN № 3
Разъем распределительного блока шины CAN № 4
ПРЕДОСТЕРЕЖЕНИЕ / ПРИМЕЧАНИЕ / УКАЗАНИЕ
Перед измерением сопротивления шины CAN, выключите зажигание и оставьте автомобиль в покое на 1 минуту или более, не приводя в действие ключ, любые другие переключатели и не открывая/закрывая двери. После этого, отсоедините провод от отрицательного (-) вывода аккумуляторной батареи и перед измерением сопротивления оставьте автомобиль в покое на 1 минуту или более.
После выключения зажигания следует подождать некоторое время, прежде чем отсоединять провод от отрицательного (-) вывода аккумуляторной батареи. Поэтому, прежде чем приступать к этой работе, обязательно ознакомьтесь с примечанием относительно отсоединения провода от отрицательного (-) вывода аккумуляторной батареи.
Так как порядок проведения диагностики важен для получения корректных результатов, начните поиск неисправностей с раздела «Порядок поиска неисправностей», если выводятся коды DTC, связанные с системой передачей данных CAN.
После ремонта выполните процедуру проверки кодов DTC и убедитесь, что коды DTC не выводятся снова.
Процедура проверки кодов DTC: Включите зажигание (IG), подождите не менее 61 с и затем двигайтесь на автомобиле со скоростью не менее 20 км/час (12 миль в час) в течение не менее 10 минут.
После ремонта выполните проверку шины CAN и убедитесь, что отображаются все ЭБУ и датчики, подсоединенные к системе передачи данных CAN.
Перед заменой главного ЭБУ кузова (бортового ЭБУ сети мультиплексной связи), ECM или ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) обратитесь к бюллетеню технического обслуживания.
Управление выключателем зажигания, какими-либо выключателями или дверями приводит к обмену данными между ЭБУ и датчиками по шине CAN. При осуществлении обмена данными сопротивление изменяется.
Если DTC регистрируется при непродолжительном движении на автомобиле даже после удаления кодов DTC, неисправность может возникать вследствие вибрации автомобиля. В подобных случаях необходимо пошевелить разъемы ЭБУ или жгутов проводов во время проверки, чтобы установить причину неисправности.
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЩИТОК ПРИБОРОВ)
Отсоедините провод от отрицательного (-) вывода аккумуляторной батареи.
Отсоедините разъем G16 щитка приборов.
Вид спереди разъема со стороны жгута проводов:
(к щитку приборов в сборе)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G16-23 (CANH) – G16-22 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ЩИТОК ПРИБОРОВ В СБОРЕ Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ECM)
Подсоедините разъем G16 щитка приборов в сборе.
Отсоедините разъем A53 ECM.
Вид спереди разъема со стороны жгута проводов:
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| A53-13 (CANH) – A53-26 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ECM Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
Подсоедините разъем A53 ECM.
Отсоедините разъем G98 распределительного блока шины CAN № 4.
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 4)
*b к разъему № 3 распределительного блока шины CAN *c К щитку приборов в сборе *d к ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) *e К блоку управления системой кондиционирования *f к ЭБУ предупреждения о недопустимой дистанции *g
К ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
к дополнительному разъему (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
Номинальное сопротивление Подключение диагностического прибора Условие Заданные условия Куда подсоединить G98-1 (CANH) – G98-11 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 108 – 132 Ом Разъем распределительного блока шины CAN № 3 G98-2 (CANH) – G98-12 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 108 – 132 Ом Щиток приборов в сборе G98-3 (CANH) – G98-13 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) G98-5 (CANH) – G98-15 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более Блок управления системой кондиционирования в сборе G98-6 (CANH) – G98-16 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ предупреждения о недопустимой дистанции G98-7 (CANH) – G98-17 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ сетевого шлюза*1 G98-7 (CANH) – G98-17 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи
200 Ом или более*3
1 МОм или более*4
Дополнительный разъем (ЭБУ буфера шины)*2
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 3) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (главная шина щитка приборов) | D |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4
ПЕРЕЙДИТЕ К ШАГУ 5 Click here
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ЩИТОК ПРИБОРОВ – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
Отсоедините разъем G97 распределительного блока шины CAN № 3.
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 3)
*b К DLC3 *c к датчику положения рулевого колеса *d К ECM *e К главному ЭБУ кузова (бортовому ЭБУ сети мультиплексной связи) *f К ЭБУ системы SRS в сборе *g К ЭБУ стояночного тормоза в сборе *h к ЭБУ системы противоскольжения (блоку управления рабочими цилиндрами тормозов) *i к разъему № 4 распределительного блока шины CAN *j
К приемнику системы навигации в сборе
(для моделей с приемником системы навигации)
к радиоприемнику с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
*l к ЭБУ рулевого управления с усилителем в сборе
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия | Куда подсоединить |
|---|---|---|---|
| G97-1 (CANH) – G97-11 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | DLC3 |
| G97-2 (CANH) – G97-12 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Датчик положения рулевого колеса |
| G97-3 (CANH) – G97-13 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108 – 132 Ом | ECM |
| G97-4 (CANH) – G97-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи) |
| G97-5 (CANH) – G97-15 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы SRS в сборе |
| G97-6 (CANH) – G97-16 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ стояночного тормоза в сборе |
| G97-7 (CANH) – G97-17 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе) |
| G97-8 (CANH) – G97-18 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | Разъем распределительного блока шины CAN № 4 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Приемник системы навигации в сборе*1 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Радиоприемник с дисплеем в сборе*2 |
| G97-10 (CANH) – G97-20 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ рулевого управления с усилителем |
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 4) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (вспомогательная шина DLC3) | D |
| NG (главная шина ECM) | E |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ГЛАВНУЮ ШИНУ CAN ИЛИ РАЗЪЕМ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4 – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНЫЕ ШИНЫ CAN, ПОДКЛЮЧЕННЫЕ К DLC3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ECM – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА CAN № 3)
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЭБУ, ДАТЧИК)
Подсоедините все жгуты проводов.
Отсоедините разъем, содержащий контакты CANH и CANL, от ЭБУ (или датчика), к которому подсоединена замкнутая накоротко вспомогательная шина.
| *1 | DLC3 |
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G9-6 (CANH) – G9-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 54 – 69 Ом |
Если при отсоединении разъема от ЭБУ (или датчика) сопротивление стало нормальным (54–69 Ом), возможно короткое замыкание в ЭБУ (или датчике).
| Результат |
|---|
| Результат |
|---|
| OK |
| NG |
ЗАМЕНИТЕ СООТВЕТСТВУЮЩИЙ ЭБУ ИЛИ ДАТЧИК
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНУЮ ШИНУ ИЛИ РАЗЪЕМ СООТВЕТСТВУЮЩЕГО ЭБУ ИЛИ ДАТЧИКА
Измерение и диагностика шины CAN. Что такое шина CAN? Почему не работает кан шина в автомобиле
С каждым годом автомобильные электрические схемы увеличивались в размере и усложнялись в конструкции. На первых выпущенных автомобилях от магнето работало зажигание, а аккумуляторной батареи и генератора не было совсем. В фарах использовались ацетиленовые горелки.
В 1975 году длина проводов в автомобильной электрической схеме была равна нескольким сотням метров и была сопоставима с электрикой лёгкомоторной авиации.
Желание упростить электропроводку была такой: необходим всего один провод, подключить к нему все потребители и к каждому подвести устройство управления. Пропустить по этому проводу электроток к потребителям и сигналы управления устройствами.
Видео
К 1991 году, благодаря прорыву цифровых технологий, фирмы Bosch и Intel создали сетевой интерфейс CAN (Controller Area Network) для мультипроцессорных систем бортовых компьютеров. В электронике такую систему называют «шиной».
В последовательной шине (serial bus) данные передаются импульс за импульсом по витой паре (двум проводам), а в параллельной шине (parallel bus), данные идут по нескольким проводам одновременно.
При большей производительности, параллельная шина усложняет электропроводку автомобиля. Последовательная шина передаёт информации до 1 Мбит/сек.
Разные блоки делятся данными, правило, по которому это происходит, называется протоколом. Протокол может отправлять разным блокам команды, запрашивать данные у одного или у всех. Помимо конкретного обращения к устройству, протокол может задать важность и командам. К примеру, команда включения вентилятора охлаждения двигателя будет приоритетней команды опускания бокового стекла.
Минимизация современной электроники позволила наладить выпуск дешёвых модулей управления и систем связи. В автомобильной сети они могут объединяться в цепи, звёзды и кольца.
Информация идёт в обе стороны, например, включив лампу дальнего света, на панели приборов загорится сигнал – светит она или нет.
Система управления двигателем выбирает наилучший режим, получая данные от всех устройств цепи, система освещения включит или отключит фары, система навигации проложит или изменит маршрут и так далее.
Благодаря такому протоколу диагностика двигателя и других устройств автомобиля упростилась.
Желание иметь всего один провод в автомобиле не осуществилось, но CAN – модуль и протокол передачи данных повысили надёжность системы и упростили электропроводку.
Видео
CAN шина — что это такое?
CAN – шина («кан шина») является системой управления всеми электрическими приборами и цифровой связи в автомобиле, которая может получать информацию от устройств, между ними обмениваться данными, а также ими управлять. Данные о техническом состоянии и управляющие сигналы идут в цифровом виде по витой паре благодаря специальному протоколу. От бортовой сети автомобиля к каждому потребителю идёт питание, но все они соединены параллельно. Такой вариант повысил надёжность всей электросхемы, снизил количество проводов и упростил монтаж.
Что такое CAN шина.
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).

Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д…) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.

Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.

Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля. позволяет значительно сократить вмешательство в штатную электропроводку (подключения производятся всего к 6-8 проводам, вместо 15-20 в варианте без использования can шины) и позволяет избежать проблем с гарантией на электрооборудование автомобиля.
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
2 Особенности работы сети
Следует понимать, что данные по CAN-сети передаются в виде кадров. Наиболее важные из них – это поле идентификатора (Identifire) и система данных (Data). Наиболее часто используемый тип сообщения по Кан-шине – Data Frame. Данный тип передачи данных состоит из так называемого арбитражного поля и определяет приоритетную передачу данных в том случае, если сразу несколько узлов системы передают данные на CAN-шину.

Каждое из подключенных к шине устройств управления имеет свое входное сопротивление, а общая нагрузка рассчитывается из суммы всех подключенных к шине исполняемых блоков. В среднем, входное сопротивление систем управления двигателем, которые подключаются на CAN-шину, составляет 68-70 Ом, а сопротивление информационно-командной системы может составлять до 3-4 ОМ.
3 Кан-интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.

Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Важно отметить, что определенных стандартов для разъемов сети Can на сегодняшний день не существует. Поэтому каждый из протоколов определяет свой тип разъемов на CAN-шине, в зависимости от нагрузки и других параметров.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Шина CAN-bus была создана в конце 80-х годов фирмой Robert Bosch GmbH (Германия) как решение для распределенных систем, работающих в режиме реального времени. Отличительной особенностью шины является ее высокая помехозащищенность. Дополнительным преимуществом шины CAN выступает ее устойчивость к механическим повреждениям — замыкание проводников шины на общий провод, питание или между собой не приводит к выходу из строя устройств. Более того, некоторые модификации шины способны функционировать при обрыве одного из проводников.
CAN-шина в промышленных сетях
Полевая шина CAN (Controller Area Network) характеризуется высокими скоростью передачи данных и помехоустойчивостью, а также способностью обнаруживать любые возникающие ошибки. Благодаря этому CAN сегодня широко используется в таких областях, как автомобильный и железнодорожный транспорт, промышленная автоматика, авиация, системы доступа и контроля. По данным ассоциации CiA (CAN in Automation, www.can-cia.de), в настоящее время в эксплуатации находится около 300 млн CAN-узлов по всему миру. В Германии CAN-шина занимает первое место по популярности среди остальных полевых шин.
Характеристики протокола CAN Преимущества CAN
Общая тенденция в области автоматизации состоит в замене традиционной централизованной системы управления на распределенное управление путем размещения интеллектуальных датчиков и исполнительных механизмов рядом с управляемым процессом. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностики ошибок и проблемами с надежностью. Связь между узлами такой системы осуществляется с помощью полевой шины. CAN — это система связи для многоконтроллерных систем. Рассмотрим более подробно преимущества CAN и причины, по которым CAN приобретает все большее распространение.
Испытанный стандарт. Протокол CAN активно используется уже более 20 лет, что очень важно для таких консервативных областей как железнодорожный транспорт или судостроение. CAN был разработан в 1980 г. фирмой Robert Bosch для автомобильной промышленности. CAN-интерфейс регламентирован международными стандартами ISO 11898 для высокоскоростных и ISO 11519-1 для низкоскоростных приложений. Низкая стоимость определяется хорошим соотношением цена/производительность, также широкой доступностью CAN-контроллеров на рынке. Надежность определяется линейной структурой шины и равноправностью ее узлов, так называемой мультимастерностью (Multi Master Bus), при которой каждый узел CAN может получить доступ к шине. Любое сообщение может быть послано одному или нескольким узлам. Все узлы одновременно считывают с шины одну и ту же информацию, и каждый из них решает, принять данное сообщение или игнорировать его. Одновременный прием очень важен для синхронизации в системах управления. Отказавшие узлы отключаются от обмена по шине.
Высокая помехоустойчивость достигается благодаря подавлению синфазных помех дифференциальным приемопередатчиком, работе встроенных механизмов обнаружения ошибок (одна необнаруженная ошибка за 1000 лет при ежедневной 8-часовой работе сети на скорости 500 Кбит/с), повтору ошибочных сообщений, отключению неисправных узлов от обмена по шине и устойчивости к электромагнитным помехам.
Гибкость достигается за счет простого подключения к шине и отключения от шины CAN-узлов, причем общее число узлов не лимитировано протоколом нижнего уровня. Адресная информация содержится в сообщении и совмещена с его приоритетом, по которому осуществляется арбитраж. В процессе работы возможно изменение приоритета передаваемого сообщения. Следует также отметить возможность программирования частоты и фазы передаваемого сигнала и арбитраж, не разрушающий структуру сообщений при конфликтах. На физическом уровне есть возможность выбора разнотипных линий передачи данных: от дешевой витой пары до оптоволоконной линии связи.
Работа в реальном времени становится возможной благодаря механизмам сетевого взаимодействия (мультимастерность, широковещание, побитовый арбитраж) в сочетании с высокой скоростью передачи данных (до 1 Мбит/с), быстрой реакцией на запрос передачи и изменяемой длиной сообщения от 0 до 8 байт.
Приложения CAN
CAN является идеальным решением для любого приложения, где микроконтроллеры обмениваются сообщениями друг с другом и с удаленными периферийными устройствами. Изначально CAN использовался в автомобилях для обеспечения критичного по времени управления и обмена информацией между двигателем и коробкой передач при гарантированном времени ожидания сообщения и допуске каждого из участников сети к работе с текущими данными. Наряду с достаточно дорогими высокоскоростными решениями существуют и экономичные решения для подключения к сети инерционных устройств, которые работают в шкале времени сотен микросекунд (система управления дверьми, подъемник окна, управление зеркалом). При этом мощные жгуты электрических проводов заменяются двухпроводной CAN-сетью, узлами которой являются, в том числе, тормозные огни и указатели поворота.
Широкое применение CAN нашел в промышленной автоматике, где имеется большое число устройств управления, датчиков, механизмов, электроприводов и других объектов, которые связаны единым технологическим циклом (системы отопления и кондиционирования, насосы, конвейеры, лифты, эскалаторы, транспортеры и т. д.). Важной особенностью таких систем является возможность диагностики и управления объектами, расположенными на большой территории, по адаптивным алгоритмам. В результате достигается существенное уменьшение потребляемой мощности, шума, износа оборудования. Подобная картина наблюдается и в железнодорожных бортовых системах, где решающую роль играет обмен данными между подсистемами при наборе скорости, торможении, управлении дверьми и диагностике.
Физический уровень
Физический уровень CAN-шины представляет собой соединение «монтажное И» между всеми устройствами, подключенными к ней. Дифференциальные сигнальные линии называются CAN_H и CAN_L и в статическом состоянии находятся под потенциалом 2,5 В. Лог. 1 (рецессивный бит) обозначает состояние шины, при котором уровень на линии CAN_H выше, чем уровень CAN_L. При лог. 0 (доминантный бит) уровень на линии CAN_H ниже, чем уровень CAN_L. Принято следующее соглашение о состоянии шины: пассивное состояние шины соответствует уровню лог. 1, а активное — уровню лог. 0. Когда сообщения не передаются по шине, она находится в пассивном состоянии. Передача сообщения всегда начинается с доминантного бита. Логика работы шины соответствует «проводному И»: доминантный бит «0» подавляет рецессивный бит «1» (рис. 12.1).
Рис. 12.1. Логика работы CAN шины
При физической реализации конкретного проекта с CAN необходимо определить свойства шины и ее узлов: где располагаются обрабатывающие устройства, какими свойствами они обладают, какие датчики и исполнительные механизмы присутствуют в системе, являются они интеллектуальными или нет, что можно сказать об их физическом расположении. В зависимости от условий эксплуатации могут использоваться однопроводная линия (в пределах печатной платы), двухпроводная линия, витая пара или волоконно-оптическая линия. При дифференциальном методе формирования сигналов двухпроводная линия позволяет значительно повысить помехоустойчивость. При использовании дифференциальных напряжений CAN-сеть продолжает функционировать в чрезвычайно шумной среде или при обрыве одной из сигнальных линий. Даже при простой витой паре дифференциальные входы CAN эффективно нейтрализуют шум.
Максимальная скорость передачи данных составляет 1 Мбит/с при длине шины 40 м и около 40 Кбит/с при длине шины 1000 м.
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 12.2). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.

Рис. 12.2. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 12.3). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.

Рис. 12.3. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Арбитраж узлов CAN-шины
CAN имеет много уникальных свойств, отличающих его от других шин. В протоколе CAN осуществляется посылка сообщений по общей CAN-шине, при этом отсутствуют адреса отправителя и получателя сообщения. Каждый узел постоянно «просматривает» шину и осуществляет локальную фильтрацию при приеме, используя битовые маски, и решает, какие сообщения извлекать из шины.
В результате, узел принимает и обрабатывает только те сообщения, которые предназначены именно для него.
Каждое сообщение имеет свой приоритет, значение которого содержится в идентификаторе сообщения. Кроме того, идентификаторы используются для обозначения типа сообщения. Сообщению с младшим номером идентификатора соответствует высший приоритет; наивысшим приоритетом обладает сообщение с идентификатором, состоящим полностью из нулей. Передача сообщения начинается с отправки на шину идентификатора. Если доступ к шине требуют несколько сообщений, то сначала будет передано сообщение с наиболее высоким приоритетом, то есть с меньшим значением идентификатора, независимо от других сообщений и текущего состояния шины. Каждый узел перед передачей сообщения проверяет, работает ли узел с более высоким приоритетом. Если да, то он возвращается в состояние приемника и пытается передать сообщение в другое время. Это свойство имеет особое значение при использовании в системах управления реального времени, поскольку значение приоритета жестко определяет время ожидания.
Если передача узла А приостанавливается узлом B, посылающим сообщение с более высоким приоритетом, то, как только шина освободится, будет сделана другая попытка передачи сообщения от узла A. Этот принцип получил название CSMA/CA: Carrier Sense Multiple Access/Collision Avoidance (общий доступ с опросом/предотвращение конфликтов). Такой режим в отличие от Ethernet не позволяет конфликтующим узлам в шине выяснять отношения, а сразу выявляет победителя и сокращает время обмена.
Итак, благодаря арбитражу шины сообщение с высшим приоритетом передается первым, обеспечивая функционирование системы в реальном масштабе времени и быструю передачу информации. Распределение приоритетов между различными типами сообщений задается разработчиком при проектировании сети.
Формат сообщений
Если не учитывать процедуру повтора сообщения, принятого с ошибкой, существует два вида связи между узлами: один узел передает информацию, а другой получает, или узел A запрашивает узел B о данных и получает ответ.
Рис. 12.4. Кадр данных (Data Frame)
Для передачи данных служит кадр данных — Data Frame (рис. 12.4), который содержит:
- идентификатор, указывающий на тип сообщения («скорость_двигателя», «температура_масла») и на приоритет доступа к шине. Поле идентификатора содержит различное количество бит в зависимости от разновидности протокола: в стандартном формате CAN V2.0A предусмотрен 11-разрядный идентификатор, а в расширенном CAN V2.0B — 29-разрядный;
- поле данных, содержащее соответствующее сообщение («скорость_двигателя»= 6000 об/мин, «температура_масла»=110 °C) длиной до восьми байт;
- два байта контрольной суммы — Cyclic Redundancy Check (CRC) для выявления и коррекции ошибок передачи.
Для запроса информации узел CAN использует кадр запроса данных Remote Frame (рис. 12.5), который содержит:
- идентификатор, определяющий тип запрашиваемой информации («скорость_ двигателя», «температура_масла») и приоритет сообщения;
- два байта контрольной суммы CRC .
Рис. 12.5. Кадр запроса данных Remote Frame
В этом случае за идентификатором не следуют данные и код длины данных не имеет прямого отношения к количеству байт данных. Узел, которому предложено передать информацию (датчик температуры масла), передает кадр данных, содержащий требуемую информацию. Таким образом, если узел А направляет узлу В кадр запроса с идентификатором «температура_масла», то узел В опрашивает датчик температуры и направляет узлу А кадр данных, содержащий идентификатор «температура_масла» и требуемую информацию.
Дополнительная информация, содержащаяся в кадре, позволяет определить формат и синхронизацию протокола передачи сообщения и тип посылки:
- какое сообщение послано — запрос о данных или собственно данные определяют бит удаленного запроса передачи (RTR для 11-разрядного идентификатора и SRR для 29-разрядного);
- код длины данных, сообщающий, сколько байтов данных содержит сообщение; все узлы принимают кадр данных, но те из них, которым эта информация не нужна, ее не сохраняют;
- для обеспечения синхронизации и контроля кадр содержит поля начала кадра Start of Frame, конца кадра End of Frame и подтверждения Acknowledgement Field;
- вход в режим синхронизации на шине осуществляется первым битом поля Start of Frame, далее синхронизация поддерживается фронтом при смене уровня посылаемых битов;
- используется механизм битстаффинга — вставка дополнительного бита при следующих подряд пяти нулях или единицах.
Обнаружение ошибок
Сигнализация об ошибках происходит путем передачи кадра ошибки Error Frame. Он инициируется любым узлом, обнаружившим ошибку. CAN-контроллеры используют метод статистической обработки ошибок. Каждый узел содержит счетчики ошибок при передаче и приеме Transmit Error Counter и Receive Error Counter. Если передатчик или приемник обнаруживают ошибку, значение соответствующего счетчика увеличивается. Когда значение счетчика превышает некоторый предел, текущая передача прерывается. Узел выдает сигнал об ошибке в виде Error Frame, где выставляет активный доминантный флаг ошибки длиной 6 бит. После этого узел, передача которого была прервана, повторяет сообщение. Ненадежным или частично поврежденным узлам разрешено посылать лишь пассивный рецессивный флаг ошибки.
В CAN существует несколько разновидностей ошибок. Из них три типа на уровне сообщений:
- CRC Error — ошибка контрольной суммы (при несовпадении принятой в поле CRC и вычисленной контрольных сумм).
- Form Error — ошибка формата кадра при несоответствии принятого сообщения формату CAN.
- Acknowledgement Error — ошибка подтверждения приема сообщения, если ни один из узлов не подтвердил правильного получения сообщения.
Кроме того, существует два типа ошибок на битовом уровне:
- Bit Error — обнаружение активным узлом расхождения между посланным в шину уровнем и фактическим значением за счет реализации узлом механизма самоконтроля.
- Stuff Error — наличие в поле сообщения шести следующих подряд бит 0 или 1 (ошибка битстаффинга).
Благодаря этим механизмам обнаружения и коррекции ошибок вероятность пропуска ошибки крайне мала. Например, при скорости 500 Кбит/с, загруженности шины 25 % и использовании в течение 2000 часов в год возникает лишь одна необнаруженная ошибка за 1000 лет. Кроме того, в шине невозможна ситуация блокировки неисправным узлом работы всей сети. Такие узлы обнаруживаются и отключаются от обмена по шине.
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com) .
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.

Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.

Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC

В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.

В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.

Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.

Это выглядит так:



Спустя 80 секунд:

Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.

Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.

Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.

В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
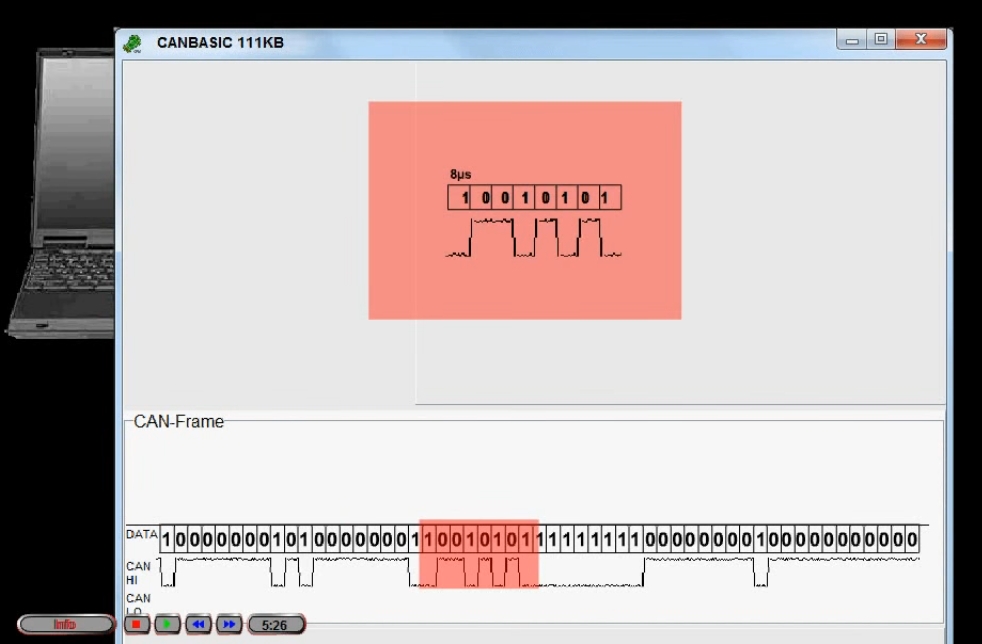
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.

Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).

Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.

Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.

Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.

С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.

Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.

Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.

В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.

Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.

Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.