1.2. Измерение крутящих моментов
Момент M – физическая величина, выражаемая произведением силы F на плечо L (момент сил).
В случае вращающихся силовых или рабочих машин для других объектов, в которых сила вызывает вращение тела вокруг некоторой точки, говорят о крутящем моменте. Крутящий момент можно обозначать с индексом, например Md. В этом случае плечом является радиус, на котором действует сила F: M = F L; = F r.
Единицей момента силы в системе СИ является ньютон-метр (Н·м), под которым понимают момент силы, равной 1 Н, относительно точки, расположенной на расстоянии 1 м от линии действия силы.
1.2.1. Преобразователи (датчики) крутящего момента.
Преобразователи (датчики) крутящего момента, как показывает опыт, часто подвергаются разрушающей перегрузке. Это объясняется следующим.
В зависимости от типа устройства, создающего крутящий момент, среднее значение этого момента образовано последовательностью импульсных моментов, которые могут значительно превосходить среднее значение. В двигателях внутреннего сгорания вообще имеет место пульсирующий крутящий момент. В то же время нередко ошибочно при тарировке и испытаниях датчиков крутящего момента используют электродвигатели, создающие постоянный крутящий момент. Часто не учитывают того, что исследуемая установка представляет собой колебательную систему и что в ней могут возникать крутильные колебания. При переходе через положение резонанса мгновенные значения могут во много раз превысить среднее значение крутящего момента. Преобразователи (датчики), рассчитанные на среднее значение момента, могут не выдержать таких перегрузок, и поэтому их необходимо рассчитывать на максимумы момента.
При измерении динамической колебательной характеристики производственного оборудования необходимо проверить, в какой мере преобразователь (датчик) крутящего момента, действующий как торсионная пружина, меняет колебательную характеристику всей установки в целом.
Тензорезисторные преобразователи (датчики) крутящего момента. Такие преобразователи находят широкое использование для измерения крутящего момента. Диапазон измерений серийно выпускаемых тензорезисторных преобразователей крутящего момента составляет от 0 – 0,1 Н·м до 0 – 50 кН·м, а в случае необходимости и более.
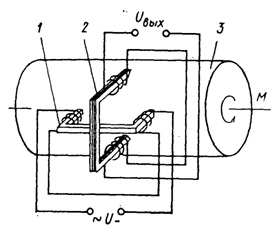
К онструктивное исполнение, основные типы. Важнейшей частью преобразователя (датчика) крутящего момента является, как правило, чувствительный цилиндричес-кий элемент, который под действием приложенного к нему моменту закручивается. Возникающие при этом напряжения сдвига или деформации служат мерой крутящего момента. Упомянутые напряжения или деформации воспринимаются тензорезисторами, которые приклеивают к чувствительному элементу под углом 450 к его продольной оси и включают в схему моста Уитстона. Для передачи питающего напряжения и измерительного сигнала применяют контактные кольца или передачу сигналов без использования контактных колец. На рисунке приведена типичная конструкция преобразователя (датчика) крутящего момента с контактными кольцами. На суженном участке вала, представляющего собой чувствительный элемент, видны тензорезисторы, расположенные под углом 450. Известно соотношение . Поэтому, зная j и параметры торсионного вала получим Измеряя углы закручивания, можно определить соответствующее значение Мк . При малых крутящих моментах для получения достаточной деформации диаметр вала должен быть очень малым. (Для обеспечения необходимой устойчивости в этих случаях применяют чувствительные элементы другой формы, например в виде клетки, стержни которой работают на изгиб). Односторонне расположение подшипников снижает погрешности от трения. Для вентиляции и охлаждении служит вентилятор. Тензорезисторы соединены с неподвижным корпусом при помощи контактных колец и съемных щеток. Необходимые для измерения мощности параметры скорости и направления вращения могут быть также получены бесконтактным способом.
онструктивное исполнение, основные типы. Важнейшей частью преобразователя (датчика) крутящего момента является, как правило, чувствительный цилиндричес-кий элемент, который под действием приложенного к нему моменту закручивается. Возникающие при этом напряжения сдвига или деформации служат мерой крутящего момента. Упомянутые напряжения или деформации воспринимаются тензорезисторами, которые приклеивают к чувствительному элементу под углом 450 к его продольной оси и включают в схему моста Уитстона. Для передачи питающего напряжения и измерительного сигнала применяют контактные кольца или передачу сигналов без использования контактных колец. На рисунке приведена типичная конструкция преобразователя (датчика) крутящего момента с контактными кольцами. На суженном участке вала, представляющего собой чувствительный элемент, видны тензорезисторы, расположенные под углом 450. Известно соотношение . Поэтому, зная j и параметры торсионного вала получим Измеряя углы закручивания, можно определить соответствующее значение Мк . При малых крутящих моментах для получения достаточной деформации диаметр вала должен быть очень малым. (Для обеспечения необходимой устойчивости в этих случаях применяют чувствительные элементы другой формы, например в виде клетки, стержни которой работают на изгиб). Односторонне расположение подшипников снижает погрешности от трения. Для вентиляции и охлаждении служит вентилятор. Тензорезисторы соединены с неподвижным корпусом при помощи контактных колец и съемных щеток. Необходимые для измерения мощности параметры скорости и направления вращения могут быть также получены бесконтактным способом.
Преобразователи (датчики) крутящего момента с бесконтактной передачей сигналов наиболее эффективны для непрерывного контроля, так как они работают практически без износа и без обслуживания. Примером такого преобразователя является преобразователь момента, представленный на рисунке. Этот преобразователь работает совместно с фотодатчиком ДФ-1, в проеме которого размещаются диски 3 и 4, образующие при увеличении момента увеличивающиеся по ширине щели и, как следствие, формирующие при своем вращении в проеме неподвижного фотодатчика последовательности увеличивающихся по длительности импульсов.
На схеме обозначены: 1, 2 – полумуфты левая и правая; 3, 4 левый и правый диски с выступами, 5 – упругие элементы (пружины). Этот преобразователь крутящего момента содержит полумуфты 1 и 2, неподвижно закрепленные на полумуфтах диски 3 и 4 с радиальными прорезями, упругие элементы 5 (в данном примере – пружины сжатия), размещенные между в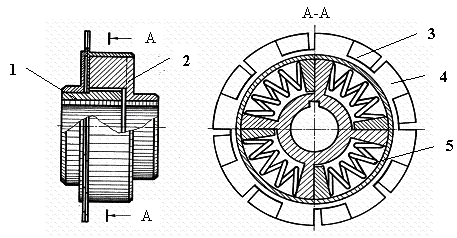 ыступами-кулачками полумуфт. Диски 3 и 4 имеют возможность поворачиваться один относительно другого, и в исходном их положении радиальные прорези одного диска перекрыты выступами другого, т.е. эти диски не образуют радиальных щелей. Полумуфты 1 и 2 расположены в непосредственной близости одна от другой так, что закрепленные на полумуфтах диски с радиальными прорезями могут быть размещены в проеме одного и того же фотодатчика. Здесь торсионный вал упразднен и заменен упруго деформируемыми элементами, связывающими полумуфты в окружном направлении. Следовательно, рассматриваемый преобразователь фактически представляет собой упругую муфту, позволяющую помимо своей основной функции вести измерение передаваемого момента.
ыступами-кулачками полумуфт. Диски 3 и 4 имеют возможность поворачиваться один относительно другого, и в исходном их положении радиальные прорези одного диска перекрыты выступами другого, т.е. эти диски не образуют радиальных щелей. Полумуфты 1 и 2 расположены в непосредственной близости одна от другой так, что закрепленные на полумуфтах диски с радиальными прорезями могут быть размещены в проеме одного и того же фотодатчика. Здесь торсионный вал упразднен и заменен упруго деформируемыми элементами, связывающими полумуфты в окружном направлении. Следовательно, рассматриваемый преобразователь фактически представляет собой упругую муфту, позволяющую помимо своей основной функции вести измерение передаваемого момента.
Работает преобразователь крутящего момента следующим образом. При вращении вала, на котором измеряется момент, вращаются диски 3 и 4, размещенные в проеме фотодатчика 8 или 9. Если момент на валу отсутствует, то диски 3 и 4 перекрывают световой пучок фотодатчика, и на выходе этого фотодатчика сигнал отсутствует. С появлением крутящего момента пружины 5 деформируются, полумуфты 1 и 2 поворачиваются на некоторый угол одна относительно другой, получают угловое смещение диски 3 и 4, в результате чего образуются радиальные щели, и при перемещении дисков в проеме фотодатчика последний генерирует импульсы, длительность которых пропорциональна ширине радиальных щелей, образованных дисками 3 и 4, а следовательно величине момента. При увеличении момента на валу ширина радиальных щелей, образованных дисками 3 и 4, увеличивается, а потому увеличивается длительность генерируемых фотодатчиком импульсов.
Таким образом, углы относительного поворота полумуфт 1 и 2, пропорциональные крутящему моменту, преобразуются в электрические сигналы преобразователя, которые регистрируются, и по их значениям определяются соответствующие величины измеряемых моментов.
Индуктивные преобразователи (датчики) крутящего момента. Индуктивные преобразователи (датчики) крутящего момента принципиально могут быть применены в тех же областях, что и тензорезисторные преобразователи. Однако они отличаются повышенной чувствительностью: диапазон измерений находится в пределах от 0 – 0,1 Н·см до 0 – 100 кН·м.
Конструктивное исполнение, основные типы. Основным элементом индуктивных преобразователей (датчиков) крутящего момента является торсионный стержень, закручивание которого воспринимается индуктивным преобразователем. При этом либо втяжной якорь перемещается в катушках, что вызывает разбаланс мостовой схемы, либо катушки в трансформаторной схеме перемещаются одна относительно другой. В обоих случаях на выходе системы обмоток появляется напряжение, пропорциональное закручиванию стержня, а следовательно, и крутящему моменту.
Так как индуктивные преобразователи (датчики) крутящего момента должны работать на несущей частоте, то и в данном случае имеется возможность бесконтактного подвода и регистрации напряжения.
Струнные преобразователи (датчики) крутящего момента. Метод измерения, положенный в основу струнного тензометра, может быть использован и для измерения крутящих моментов.
Струнные преобразователи (датчики) крутящего момента выпускают серийно для установки на валах диаметром от 50 до 750 мм. В зависимости от производственных условий это примерно соответствует диапазонам измерения крутящих моментов от 0 – 100 Н·м до 0 – 5 МН·м. Максимальная частота вращения составляет 1500 об/мин для валов малого диаметра и снижается максимум до 150 об/мин для валов большого диаметра.
Класс точности самого измерительного устройства 0,5 – 1 %. Если статическая юстировка невозможна, то отклонения от положенных в основу расчетных данных могут привести к дополнительной погрешности.
Конструктивное исполнение. Струнные преобразователи крутящего момента состоят из двух колец, закрепляемых на валу на заданном расстоянии одно от другого, и двух натянутых между ними ферромагнитных проволок – струны. При нагружении вала кольца хотя и незначительно, но пропорционально приложенному крутящему моменту скручиваются одно относительного другого. В результате механическое напряжение, а следовательно, и частота одной из струн повышается, а другой – понижается. Изменение частоты колебания струны, вызванное нагружением вала, служит мерой приложенного к нему крутящего момента.
Пьезоэлектрические преобразователи (датчики) крутящего момента. Пьезоэлектрический эффект используется для измерения крутящего момента только применительно к измерительной платформе. Реагирующие на сдвиг кварцевые пластинки, установлены по кольцу и их оси, направлены по касательным. Отдельные кварцевые пластинки электрически и механически соединены между собой параллельно; полный заряд соответствует воздействующему на них крутящему моменту. Применение его в основном такое же, как в пьезоэлектрических динамометрах.
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам.

04.01.2012
Приборы для измерения крутящего момента и мощности
В судовой энергетике часто возникает задача определения усилий, крутящего момента на валу и мощности. Для этой цели используются приборы, называемые торсиометрами. В качестве измерителей момента в них применяют емкостные, индукционные, тензометрические и фотоэлектрические датчики.
По крутящему моменту Мкр косвенно определяют эффективную мощность механизма:
N = 6,29Mкрn, (кВт), где n — частота вращения вала,
Mкр — крутящий момент кН•м.
Крутящий момент на валу можно определить по углу скручивания вала между двумя сечениями по его длине. Для сплошного вала угол скручивания определяется зависимостью:
где l — расстояние между сечениями; π — число = 3,14; d — диаметр вала; G — модуль упругости материала при сдвиге. Из этой формулы видно, что для данного вала на участке длиной l угол скручивания пропорционален передаваемому крутящему моменту Мкр.
Электрические емкостные торсиометры.
Электрический емкостный торсиометр (рис. 1) работает по принципу конденсатора переменной емкости. На гребном валу на расстоянии 100-150 мм закрепляют две разъемные шайбы 1 и 2. Пластинки 3 образуют конденсатор переменной емкости с воздушной прослойкой. При работе двигателя происходит относительное скручивание на угол φ двух сечений валопровода, соответствующих местам закрепления шайб. Вследствие этого изменяется зазор между пластинками 3, что вызывает изменение емкости конденсатора. Изменение емкости через токосъемник 6 и усилитель 5 фиксируется осциллографом 4, шкала которого градуируется в единицах, пропорциональных крутящему моменту.
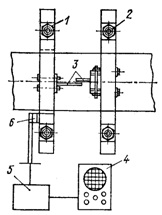
Рис. 1. Принципиальная схема электрического емкостного торсиометра.
Индукционные фазочувствительные торсиометры.
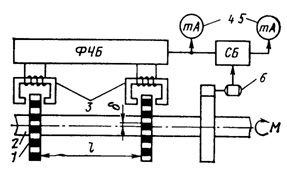
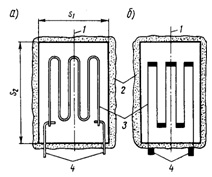
Индукционный фазочувствительный измеритель позволяет оценить крутящий момент по углу скручивания вала (рис. 2). Для этого на валу 2 жестко крепятся зубчатые диски 1 из ферромагнитного материала. Зубцы дисков с зазором движутся в пазах неподвижно закрепленных индукционных датчиков, 3 в виде П-образных сердечников с обмотками. По обмоткам течет переменный ток, магнитный поток сердечников замыкается через зубцы дисков и, если вал неподвижен, фазы напряжений на выходе датчиков совпадают. При вращении под нагрузкой вал скручивается, зубцы дисков смещаются один относительно другого, и нарушается синхронность замыкания магнитных потоков датчиков. Это приводит к разности фаз сигналов, поступающих от датчиков на вход фазочувствительного блока (ФЧБ). Пропорционально крутящему моменту вала на выходе ФЧБ формируется аналоговый сигнал, поступающий на прибор 4, шкала которого градуирована в единицах крутящего момента. Нулевое значение момента получается при неподвижном вале взаимным смещением датчиков по окружности дисков 1.
Проволочные тензорезисторы выполняют сопротивлением (10..1000) Ом. Они имеют размеры (2. 100) мм.
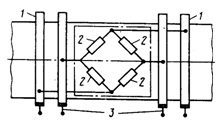
Тензодатчики соединяются в схему моста, точки питания и диагонали которого выведены через коллекторные кольца 1 со щетками (рис. 5). Расположение тензодатчиков 2 под углом 45° к оси вала практически компенсирует искажающее влияние изгиба, сжатия и температуры.
Напряжение в диагонали моста 3 пропорционально крутящему моменту. Если одновременно измерять частоту вращения и ввести результаты обоих измерений в схему умножителя, то можно получить значения мощности на валу.
Принцип действия фотоэлектрических датчиков основан на измерении интенсивности светового потока, идущего от источника (рис. 6) к фотоэлементу.
Измерение момента вращения при помощи датчиков вращения
Как правило, измерение крутящего момента стационарного металлического вала не вызывает затруднений. В случае если предел упругости вала не превышен, величина скручивания вала пропорциональна действующему моменту вращения. Измерили градус скручивания; проверили Модуль Юнга для материала вала; применили формулу из Справочника Инженера, и вот Вы получили величину крутящего момента.
Измерение крутящего момента на непрерывно вращающемся вале — задача существенно более сложная. Существует несколько способов, с помощью которых можно ее решить, но наиболее часто используемым является расчет крутящего момента на основе данных о величине мощности, затрачиваемой на вращение вала. В реальности это обычно подразумевает измерение величины тока, приложенного к двигателю, обеспечивающему движение. Такое измерение просто, понятно, но весьма неточно из-за того, что потребление тока так же зависит от целого спектра факторов: скорости, напряжения источника питания, состояния подшипниковых узлов, температуры и т.д.
Измерение момента вращения с помощью тензометрических датчиков
Существенно более точным способом является измерение скручивания вала с помощью тензометрического датчика или датчика поверхностных акустических волн (ПАВ). Это точная, но очень сложная методика, требующая применения ВКУ или устройств беспроводной передачи данных между тензодатчиком на вращающемся валу и окружающим миром. Как и любой инженер, когда-либо имевший дело с тензометрией, выражусь резко — разница между теорией тензометрических измерений и практикой использования таких датчиков колоссальна. Тензометрическим датчикам присуще иметь большие температурные коэффициенты и свойство отрываться от поверхности измерения при ухудшении условий измерения. Определение крутящего момента с помощью тензодатчиков или датчиков ПАВ целесообразно в лабораторных условиях, но для большинства промышленных применений совершенно не реалистично.
Измерение крутящего момента с помощью угловых датчиков вращения
Существует другой способ. Он не новый, но, похоже, был успешно забыт. Впервые такой вариант был применен в 50-х годах прошлого века для измерения момента вращения в двигателях внутреннего сгорания — наиболее наглядно в турбореактивных двигателях тяжелых грузовых самолетов Hercules и C-130. Техники измеряли величину скручивания и, следовательно, момент вращения с помощью измерения величины фазового сдвига между двумя многопериодными резольверами, установленными и отъюстированными на валу. Термин «многопериодный» относится к выходу резольвера — так двухпериодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 180°; 36ти-периодный резольвер имеет циклический выходной сигнал, определяющий абсолютное положение с точностью 10°.
При вращении вала каждый из резольверов выдает два сигнала: первый изменяется по синусоидальному закону, второй — по косинусоидальному. Для упрощения, на рисунке 1, приведенном ниже, показаны только два демодулированных синусоидальных сигнала.

Рисунок 1 — Измерение момента вращения с использованием многопериодных резольверов.
При приложении нулевого момента сигналы с обоих резольверов одинаковы и не имеют сдвига фаз. В случае, когда реальный момент приложен к валу сигнал одного резольвера имеет фазовый сдвиг относительно сигнала другого резольвера. Величина этого фазового сдвига прямо пропорциональна приложенному моменту. Используя многопериодные резольверы с большим числом циклов (например, 128), возможно даже при небольшой величине скручивания получить отклик в виде сравнительно большой величины фазового сдвига. Другими словами, эта методика достаточно прецизионна, чтобы измерять скручивание вала не только на величины менее 1°, но даже и на уровнях менее 0,1°. Из чего следует, что вал, на котором производится измерение, не обязательно должен быть длинным. Действительно, длина вала, необходимого для успешных измерений, может составлять менее 25 мм. Этого можно достигнуть, используя заведомо гибкий вал или располагая резольверы концентрически — один внутри другого — и соединяя внешние и внутренние части вала с применением пружины повышенной крутильной жесткости.
В отличие от тензометрических датчиков, резольверы известны своей надежностью, устойчивостью к внешним воздействиям и точностью, они зачастую используются в космической, оборонной и нефтегазовой технике, где требуются высокие точности и устойчивость к жестким условиям эксплуатации. Поскольку резольвер является бесконтактным измерительным устройством, также исключается необходимость применения токосъемников или оборудования радиочастотной передачи данных.
Итак, почему же эта техника измерений стала немодной? Вероятно, одна из причин в том, что и сами резольверы утратили свою популярность. Плоскопараллельные и плоские с большим полым валом резольверы, идеальные для использования при измерениях крутящего момента, являются откровенно дорогостоящими. Более того, сочетание резольверных двигателей с управляющей электроникой может быть очень сложным. Поскольку в наше время инженеры более привычны к цифровой электронике, они весьма неохотно соглашаются иметь дело и с самой аналоговой электроникой и, тем более, с измерениями фазовых сдвигов аналоговых переменных сигналов.
Новое поколение индуктивных датчиков
В настоящее время резольверы практически полностью заменены более современными устройствами — индуктивными энкодерами или «инкодерами». Технология измерения с помощью инкодеров основана на тех же принципах индукции, применяемых в резольверах, но при этом инкодеры содержат печатные платы вместо массивных и дорогих обмоток трансформаторов. Это позволяет существенно сокращать объем, вес и стоимость датчиков, и одновременно значительно увеличивать возможности измерений. Также в инкодеры обеспечен простой и удобный электрический интерфейс — постоянное напряжение и последовательная шина данных. Поскольку инкодеры базируются на тех же физических принципах, что и резольверы — они обеспечивают тот же набор измерительных возможностей — высокую точность и надежность измерений даже в жестких условиях окружающей среды. Мало того, инкодеры имеют оптимальный для угловых измерений форм-фактор — плоская конструкция с большим полым валом. Это позволяет пропускать вал через центр статора инкодера, а ротор инкодера закреплять непосредственно на вращающийся вал, на котором проводятся измерения. Это исключает необходимость использования ВКУ, точно так же, как это было при использовании резольверов.

Рисунок 2 — Измерение момента вращения и абсолютного положения с помощью индуктивных энкодеров.
Нет необходимости специально выбирать электронику и размещать ее отдельно, поскольку вся требуемая для датчиков электроника размещена непосредственно в статоре энкодера. Примечательно, что инкодеры доступны с разрешением до 4 миллионов импульсов на оборот, таким образом, достаточно минимального скручивания вала, чтобы обеспечить высокое разрешение измерений крутящего момента.
Температурные коэффициенты инкодера малы, в сравнении с тем, что может быть получено при использовании самых лучших тензометрических датчиков, а любые динамические искажения, вызываемые вращением вала на большой скорости, могут быть нивелированы с помощью тактового сигнала — единого для обоих инкодеров, обеспечивающего синхронность считывания данных.
В отличие от тензометрической техники, при использовании инкодеров не существует риска повреждения оборудования в случаях избыточного или импульсного приложения крутящего момента. Что еще более важно — технология позволяет проводить два вида измерений — крутящего момента и угла вращения одновременно, и по цене, меньшей, чем требует измерение одного только момента с помощью тензодатчиков.
Это старая технология, которая перестала быть модной, потому, что резольверы потеряли свою популярность. Современные индуктивные энкодеры возрождают применение принципов индукции для выполнения угловых измерений, и одновременно с этим, возвращают удобный, надежный и эффективный способ контроля крутящего момента и угла вращения.

Рисунок 3 — Индуктивные энкодеры, используемые для измерений крутящего момента на валах диаметром 300 мм: статор слева, ротор справа.
Способы измерения крутящего момента

Существуют различные способы измерения крутящего момента, которые отличаются своей точностью, гибкостью, универсальностью, условиями использования и многими другими параметрами. Ниже представлены наиболее передовые решения, решающие 80% задач по измерению крутящего момента, возникающих у наших партнеров.
Если же у Вас существует более специализированная задача обратитесь к нашим специалистам за консультацией.
Высокая точность определения крутящего момента.
Мониторинг крутящего момента в круглосуточном режиме 365 дней в году с минимальным обслуживанием в полевых или производственных условиях эксплуатации.
Внедрение измерительного узла в минимальные установочные габариты.
Высокая точность датчиков крутящего момента является на данный момент стандартным требованием предприятий, занимающихся проектированием, испытанием и мониторингом современных приводов и установок, используемых в наукоемких производствах. А в последнее время повышается спрос на датчики, работающие при скоростях вращения до 60 000 об/мин и выше. Индуктивные датчики момента серии ТМ обладают уникальной в своем роде технологией измерений крутящего момента, что позволяет обеспечивать не только высокую точность измерений, но и позволяет производить специальные высокоскоростные версии с частотами до 60 000 об/мин. Также датчики обладают высокими эксплуатационными свойствами, ознакомиться с которыми Вы сможете в специальном разделе .

Не менее распространенной задачей является Использование реактивных датчиков измерения крутящего момента при мониторинге, где постоянный контроль крутящего момента является необходимостью. Данные задачи разделяются на два основных типа:
— Энергетические, нефтедобывающие и установки, к которым предъявляются аналогичные высокие требования по точности с минимальными остановками на обслуживание и использованием в суровых условиях. Для данных установок идеально подходят фланцевые датчики типа TF , так как они не имеют изнашиваемых частей и используют бесконтактный съем данных.

— Производственные линии, тяжелое машиностроение и установки, где контролируется стабильность работы при заданных границах, но применение классических датчиков момента невозможно по конструктивным причинам. Наиболее подходящим является применение телеметрических систем, монтируемых на вал , основным преимуществом является возможность превратить почти любой вращающийся узел в датчик крутящего момента.

Последней, но не менее распространенной группой задач является натурное испытание узлов и установок в автомобильной, железнодорожной и военно-промышленной отрасли, где по каким-либо причинам не может быть предусмотрено использование готовых датчиков момента. Данные задачи связаны с суровыми условиями использования, с внедрением в уже готовые узлы и механизмы без изменения конструкции. И на данный момент наиболее универсальным и гибким решением также является использование телеметрических систем различных модификаций .
См. также здесь
Если же у Вас существует более специализированная задача обратитесь к нашим специалистам за консультацией.