7. Анализ САУ по передаточной функции
Одной из основных задач теории автоматического регулирования и управления является изучение динамических процессов, протекающих в системах регулирования. Система всегда подвергается действию внешних возмущающих сил, которые могут вывести систему из состояния равновесия. Если система устойчива, то она противостоит внешним силам, а выведенная из состояния равновесия возвращается снова к нему. Устойчивость системы автоматического регулирования является одним из основных условий ее работоспособности и включает требование затухания во времени переходных процессов. Система с расходящимся переходным процессом будет неустойчивой и неработоспособной.
Впервые свойства устойчивости были исследованы русским ученым А.М.Ляпуновым в 1892 г. в работе «Общая задача об устойчивости движения». Общее условие устойчивости линейной системы можно сформулировать так: условием устойчивости системы является расположение всех корней характеристического уравнения (полюсов передаточной функции системы) в левой комплексной полуплоскости (рис. 8). Наличие корня на мнимой оси означает, что система находится на границе устойчивости.
Сформулированное выше условие устойчивости справедливо как для линейных, так и для линеаризованных систем. Однако, в случае нулевых или
обновление от 16
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
чисто мнимых корней характеристического уравнения вопрос об устойчивости линеаризованной системы может быть решен только на основании исследования ее нелинейных уравнений.
Рис. 8. Расположение корней характеристического уравнения системы пятого порядка: а) — устойчивой; б) — неустойчивой; в) и г) находящейся на границе устойчивости.
Поскольку вопрос о корнях f(s) любого порядка свободно решается с внедрением ЭВМ лишь в последние 10-15 лет, то ранее для исследования устойчивости использовались специально разработанные косвенные методы. На практике, для упрощения расчетов, устойчивость САР определялась с помощью критериев устойчивости. Критерии устойчивости позволяют выяснить устойчивость системы без вычисления корней характеристического уравнения. Рассматриваются коэффициенты характеристического уравнения или некоторые их функции. Критерии устойчивости эквивалентны сформулированному выше условию устойчивости.
Критерии устойчивости разделяют на алгебраические и частотные. К алгебраическим относят критерии Гурвица, Льенара-Шипара и Рауса, к частотным — критерии Михайлова и Найквиста.
Из алгебраических критериев устойчивости чаще используются критерии Гурвица и Рауса, по ним можно выяснить влияние коэффициентов f(s) на устойчивость системы.
По критериям Гурвица и Рауса можно судить об устойчивости системы как в замкнутом так и в разомкнутом состоянии. Критерии устойчивости широко освещаются в литературе по теории автоматического управления и регулирования [1,2,3,4 и т.д.].В лабораторном практикуме используется критерий Гурвица.
Критерий устойчивости Гурвица
Из коэффициентов характеристического уравнения составляют матрицу
. (24)
Критерий формулируется так: чтобы рассматриваемая система была устойчивой, необходимо и достаточно при a 0 B B > 0 иметь положительными все диагональные определители, получаемые из матрицы (24), т.е.
обновление от 16.02.2004
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
 (25)
(25)
Если а п B B > 0 , то последнее неравенство в (25) удовлетворяется при  .
.
Система находится на границе устойчивости, если  и все предыдущие определители в (25) положительны.
и все предыдущие определители в (25) положительны.
Для устойчивости систем первого и второго порядков достаточно, чтобы все коэффициенты характеристического уравнения были положительными. Для системы третьего порядка характеристическое уравнение системы имеет вид f(s) = a 3 B s B 3 P P + a 2 B s B 2 P P + a 1 B s B + a 0 B B = 0 , и условие устойчивости по Гурвицу будет
 , т.е. произведение коэффициентов средних членов должно быть больше произведения крайних членов.
, т.е. произведение коэффициентов средних членов должно быть больше произведения крайних членов.
Традиционной формой [1,2,3,4] представления линейных моделей, удобной для проведения анализа динамических свойств исследуемой системы, является частотная форма. Описание в частотной области определяется набором частотных функций и частотных характеристик, как их графического отображения.
К частотным функциям относятся:
— частотная передаточная функция или комплексный коэффициент усиления
— вещественная частотная функция P(w) = ReW(jw) ;
— мнимая частотная функция Q(w) ;
— амплитудная частотная функция А(w) ;
— фазовая частотная функция ф(w) .
Частотная передаточная функция может быть представлена в двух формах: -алгебраическая форма представления
Определение передаточной функции замкнутой системы по передаточным функциям разомкнутой системы
Передаточные функции находят широкое применение при исследовании систем автоматического управления. Зная передаточную функцию системы, нетрудно определить другие динамические характеристики системы: импульсную переходную и переходную функции системы, частотные характеристики. Зная передаточную функцию системы, можно определить изменение регулируемой величины при приложении к системе воздействия произвольной формы.
В зависимости от того, рассматривается ли поведение системы при управляющем или при возмущающем воздействии, различают передаточные функции системы по управляющему и по возмущающему воздействию. При этом различают передаточные функции разомкнутых и замкнутых систем.
Передаточной функцией системы по управляющему воздействию называется отношение изображения выходной величины системы к изображению управляющего воздействия при нулевых начальных условиях.
Передаточная функция замкнутой системы по управляющему воздействию обозначается Ф(р). Она равна:

Передаточная функция разомкнутой системы по управляющему воздействию обозначается W (р). Она равна:

где Хр(р) = L[xp(t)] — изображение по Лапласу выходной величины разомкнутой системы при нулевых начальных условиях.
Передаточной функцией системы по возмущающему воздействию называется отношение изображения выходной величины системы к изображению возмущающего воздействия при нулевых начальных условиях.
Передаточная функция замкнутой системы по возмущающему воздействию обозначается У(р). Она равна:

Передаточная функция разомкнутой системы по возмущающему воздействию обозначается V(р). Она равна:

При определении передаточных функций разомкнутых систем имеется в виду, что рассматривается поведение разомкнутой системы, у которой главная отрицательная обратная связь разомкнута.
Кроме рассмотренных выше передаточных функций при анализе систем автоматического управления очень часто используют передаточную функцию ошибки замкнутой системы — отношение изображения ошибки к изображению управлявшего воздействия при нулевых начальных условиях. Она обозначается Фс(р) и определяется по формуле

где Е(р) = ?[е(/)] — изображение по Лапласу ошибки системы при нулевых начальных условиях.
Определим связь между передаточными функциями разомкнутой и замкнутой систем автоматического управления. Структурная схема любой сложной многоконтурной системы с одной регулируемой величиной методами структурных преобразований может быть приведена к схеме одноконтурной системы.
Управляющее воздействие g(t) приложено ко входу звена с передаточной функцией W, (р), а возмущающее воздействие f(p) действует на входе звена с передаточной функцией W„_2(p) (рис. 5.6, а). Разомкнем систему, т. е. отключим выход звена с передаточной функцией Wn(p) от сумматора. Структурная схема системы примет вид, как показано на рис. 5.6, б. Выходная величина разомкнутой системы обозначается хр, а ее изображение Х9<р).

Рис. 5.6. Структурная схема одноконтурной системы: а — с управляющим и возмущающим воздействием на входе; б — с отключенным выходом
Пользуясь правилами структурных преобразований, опреде лим передаточные функции разомкнутой системы.
Передаточная функция разомкнутой системы по управляющему воздействию будет равна:

В тракт прохождения возмущающего воздействия в этом случае входят звенья с передаточными функциями Wn_2 (р), Wn_x (р), Wn(p). Тогда передаточная функция разомкнутой системы по возмущающему воздействию будет равна:

Замкнем теперь систему, т. е. вновь подключим выход звена с передаточной функцией Wn(p) к сумматору.
Рассмотрим поведение системы только при возмущающем воздействии, т. е. будем считать, что управляющее воздействие отсутствует. Тогда структурная схема системы примет вид, как показано на рис. 5.7, а.

Рис. 5.7. Структурная схема системы: а — без управляющего воздействия; б — с управляющим воздействием
В результате получим звенья, соединенные с помощью положительной обратной связи. В прямой цепи включены звенья с передаточными функциями Wn_2(p), Wn_x(p), Wn(p), а в цепи обратной связи — звенья с передаточными функциями -1; fV<(p), W2(p) . 1У„_3(р). Входной величиной этого соединения звеньев является возмущающее воздействие f(t), а выходной величиной — выходная величина х системы.
Используя правила свертывания звеньев, соединенных последовательно и с помощью положительной обратной связи, получим следующее выражение для передаточной функции замкнутой системы по возмущающему воздействию:

Используя выражения (5.5) и (5.6), выражение (5.7) представим в следующем виде:

Получили искомую связь между передаточной функцией замкнутой системы по возмущающему воздействию и передаточными функциями разомкнутой системы.
Рассмотрим теперь поведение системы только при управляющем воздействии, т. е. будем считать, что возмущающее воздействие отсутствует (рис. 5.8). Тогда структурная схема замкнутой системы примет вид, как показано на рис. 5.8, а.
Ее можно рассматривать, как соединение звеньев с помощью отрицательной обратной связи. При этом в прямой цепи стоит звено с передаточной функцией W<р) -W^ip) -W2

Рис. 5.8. Поведение системы с управляющим воздействием замкнутой (а) и разомкнутой (б) систем
Используя правило свертывания звеньев, соединенных с помощью отрицательной обратной связи, получим следующее выражение для передаточной функции замкнутой системы по управляющему воздействию:

Выражение (5.9) устанавливает связь между передаточными функциями разомкнутой и замкнутой систем по управляющему воздействию.
Определим выражение для передаточной функции ошибки замкнутой системы. Поведение системы рассматривается только при управляющем воздействии. В качестве выходной величины системы рассматривается ошибка e(t). Тогда структурная схема системы может быть представлена, как изображено на рис. 5.8, б.
Эту схему также можно рассматривать как соединение звеньев с помощью отрицательной обратной связи. При этом в прямой цепи включено звено с передаточной функцией Wom

Тогда передаточная функция ошибки замкнутой системы будет равна:

Полученное выражение устанавливает связь между передаточной функцией ошибки замкнутой системы и передаточной функцией разомкнутой системы по управляющему воздействию. Сравнивая выражения (5.9) и (5.10), можно записать, что

По выражениям (5.8), (5.9), (5.10) можно определить передаточные функции замкнутых систем, зная передаточные функции разомкнутой системы.
По передаточной функции разомкнутой системы по управляющему воздействию можно также определить характеристическое уравнение разомкнутой и замкнутой системы. Передаточная функция fV(p) может быть представлена как отношение двух многочленов:


Тогда уравнение движения разомкнутой системы в операторной форме будет иметь вид:


В дифференциальной форме это уравнение будет иметь вид:

Этому уравнению соответствует следующее характеристическое уравнение разомкнутой системы:

Сравнивая выражения (5.12) и (5.13), видим, что характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции Щр), заменив р = X и приравняв полученное выражение к нулю.
Аналогично может быть получено характеристическое уравнение замкнутой системы. Передаточная функция замкнутой системы по управляющему воздействию равна:

Подставив выражение (5.11) в выражение (5.14), получим:

Рассуждая таким же образом, как и для разомкнутой системы, можно показать, что характеристическое уравнение замкнутой системы будет иметь вид:

Выражение (5.15) показывает, что характеристическое уравнение замкнутой системы можно получить, зная только передаточную функцию разомкнутой системы. Для этого необходимо просуммировать многочлены числителя и знаменателя передаточной функции W(p), произвести замену р = Х и полученное выражение приравнять к нулю.
Вполне очевидно, что характеристические уравнения как замкнутой, так и разомкнутой системы имеют одну и ту же степень.
Из выражений (5.8), (5.9), (5.10) видим, что знаменатели в этих выражениях одинаковые. Поэтому характеристическое уравнение замкнутой системы может быть получено по любой из рассмотренных передаточных функций замкнутой системы. Для этого необходимо в многочлене знаменателя передаточной функции замкнутой системы произвести замену р = X и приравнять полученное выражение к нулю.
Рассмотрим пример, иллюстрирующий методику определения передаточных функций замкнутой системы по известной структурной схеме системы управления.

Пусть имеется система управления, структурная схема которой представлена на рис. 5.9. Передаточные функции звеньев равны.

Рис. 5.9. Структурная схема системы управления для рассматриваемого примера
Определим передаточные функции разомкнутой системы по управляющему W(p) и возмущающему V(p) воздействиям. Разомкнув главную отрицательную обратную связь и применив рассмотренные ранее правила преобразований структурных схем, получим:
Передаточная функция
Пример . Объект управления (ОУ) описывается линейным дифференциальным уравнением третьего порядка:
(2)
1) Передаточная функция ОУ в общем случае может быть представлена в виде отношения
W(iω) = A(ω)e iφ(ω) = U(ω) + iV(ω),
где R(p)и Q(p) – изображения по Лапласу выходной и входной переменных ОУ, соответствующих левой и правой частям уравнения 1. Отсюда, передаточная функция будет иметь вид:
(3)
или
. (4)
2) Определим частотные характеристики ОУ. Известно, что частотная передаточная функция W(ω) может быть представлена в виде:
, (5)
где A(ω) – амплитудная частотная характеристика (АЧХ);
φ(ω) – фазовая частотная характеристика (ФЧХ);
U(ω) – вещественная частотная характеристика (ВЧХ);
V(ω) – мнимая частотная характеристика;
Подставим iω в выражение (3) вместо p . Получим:
(6)
На основе выражений (5) и (6) выделим отдельно амплитудную и фазовую частотные характеристики и подставим численные значения коэффициентов. Исходя из того, что:
A(ω) = |W(iω)|
φ(ω) = arg(W(iω))
(см. комплексные числа). Окончательно получим: (7)
3) Определим логарифмическую амплитудную частотную характеристику (ЛАЧХ).
Известно, что ЛАЧХ определяется из соотношения:
L(ω) = 20lg(A(ω)) (8)
Данная характеристика имеет размерность дБ (децибелы) и показывает изменение отношения мощностей выходной величины к входной. Для удобства ЛАЧХ строят в логарифмическом масштабе.
Фазовая частотная характеристика, построенная в логарифмическом масштабе, будет называться логарифмической фазовой частотной характеристикой (ЛФЧХ).
Примеры построения ЛАЧХ и ЛФЧХ для наших исходных данных приведены на рисунке 1.
Определим импульсную переходную (весовую) функцию. Весовая функция w(t) представляет собой реакцию системы на единичную импульсную функцию, поданную на ее вход. Весовая функция связана с передаточной функцией преобразованием Лапласа.
. (9)
Следовательно, весовую функцию можно найти, применив обратное преобразование Лапласа к передаточной функции.
w(t) = L -1 [W(p)] (10)
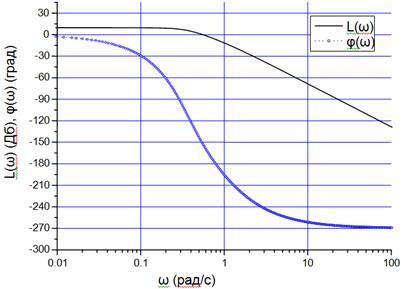
Рисунок 1 — L(ω) – ЛАЧХ системы (Дб); φ(ω) – ЛФЧХ системы (град); ω – частота входного сигнала (рад/с)
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР)
Продолжаем публикацию лекций по курсу «Управление в Технических Системах» автор — Олег Степанович Козлов на кафедре Э7 МГТУ им. Н.Э. Баумана.
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
Будет как всегда позновательной увлекательно и жестко
5.1. Главная передаточная функция. Передаточные функции по возмущающему воздействию и для ошибки (рассогласования)
Используя структурные преобразования (см. раздел 4), структурную схему практически любой линейной или линеаризованной САР (САУ) можно привести к виду:
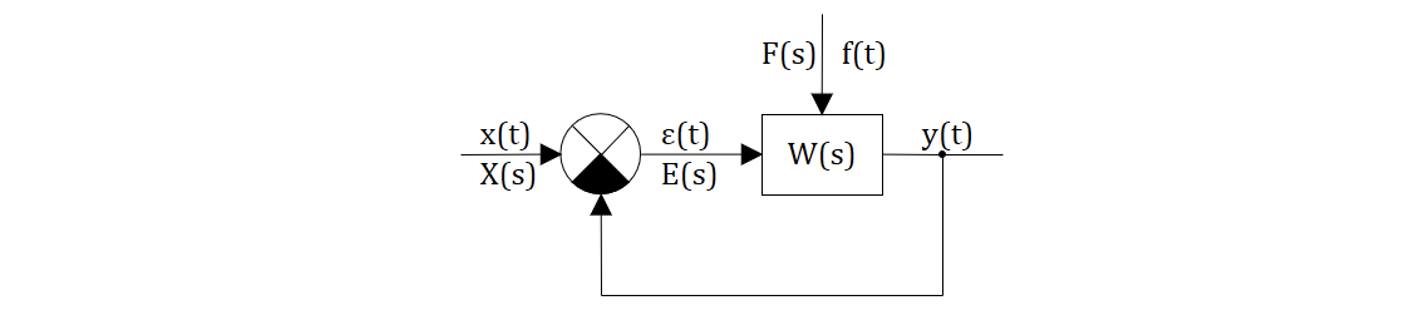
Рисунок 5.1.1 Типовая струкутура САР
Где функции по времени:
– регулируемая величина (выходное воздействие);
Или в изображениях:
Определение: Если единичная обратная связь охватывает все элементы (звенья) САР – она называется главной.
Определение: Если главная обратная связь отсутствует — САР считается разомкнутой.
Передаточная функция может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
Возмущающих воздействий может быть несколько и приложены они могут быть в любом месте структурной схемы.
Передаточную функцию которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):
где – общий коэффициент усиления; – полиномы по степеням переменной , причем свободные члены в них равны 1 (единице).
Учитывая, что САР линейна или линеаризована, разделим на структурной схеме каналы прохождения управляющего и возмущающего воздействий. Выделим в отдельное звено (может быть и очень сложное) ту часть системы, через которую проходит возмущающее воздействие обозначим ее через Структурная схема САР принимает вид:

Рисунок 5.1.2 Структурная схема общего вида с передаточной функцией и внешним воздействием
В Теории Управления используют 3 основных передаточных функций замкнутой САР:
главная передаточная функция ;
передаточная функция по возмущающему воздействию ;
передаточная функция для ошибки (рассогласования)
Рассмотрим более подробно вышеупомянутые передаточные функции.
Главная передаточная функция
Главная передаточная функция -передаточная функция по управляющему воздействию математическое определение этой передаточной функции:
выведем формулу при условии если возмущеющие воздействие равно . «Обойдем» структурную схемв по контуру:
Примечание. Формула (5.3) совпадает с формулой для передаточной функции цепи с местной единичной обратной связью (см. раздел 4 – «Структурные преобразования»).
Подставляя вместо ее выражение через полиномы и
Анализ выражения (5.4) показывает, что свойства главной передаточной функции замкнутой САР однозначно определяются свойствами разомкнутой САР, т.е. через полиномы и .
Передаточная функция замкнутой САР по внешнему возмущающему воздействию
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействи , а возмущеющие воздействие отличное от нуля . В этом случае (см. рисунок 5.1.2) получается:
Перрейдем к изображением и «обойдем» схему (см. рис. 5.1.2) по контуру
Подставляя вместо ее выражение через полиномы и получаем:
где: — вид данного полинома зависит от места приложения возмущающего воздействия;
Формулы 5.4 и 5.6 имеют общий занаменатель
Передаточная функция замкнутой САР для ошибки (рассогласования)
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействиt отлично от 0 , а возмущеющие воздействие равно 0 . В этом случае для передаточной функции получается (см. рис. 5.1.2):
Сделаем вывод соответствующих формул, выполнив «обход» по контуру схемы (см. рис. 5.1.2)
Учитывая формулу для главной передаточной функции можно записать выражения для передаточной функции рассоглаосвания:
Подставляя вместо ее выражение через полиномы и получаем:
Опять замечаем, что знаменатель передаточной функции равен полиному следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
В Теории Управления выражение имеет «собственное» название: характеристический полином замкнутой САР.
5.2 Уравнения динамики замкнутой САР
Как указывалось в подразделе 5.1, любую замкнутую САР можно привести к виду представленному на рисунке 5.2.1:
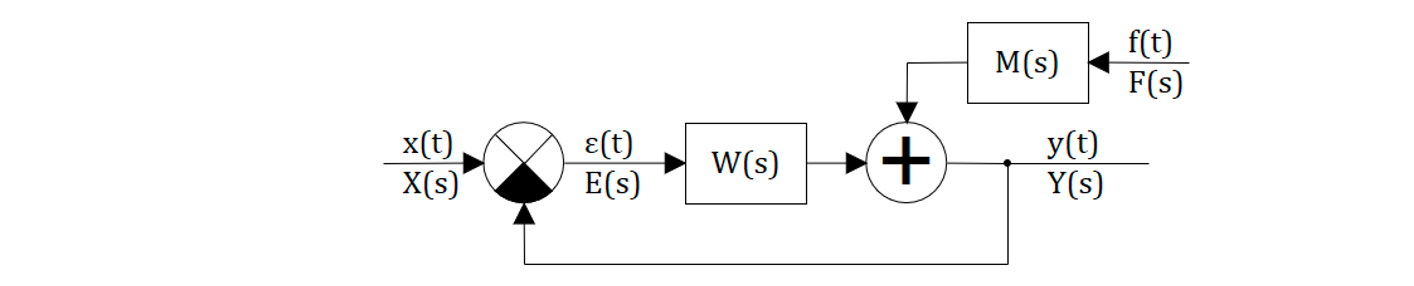
Рисунок 5.2.1 Общая схема замкнутой САР с возмущающим воздействием
Выведены соотношения для 3-х основных передаточных функций замкнутой САР позволяют записать выражения для регулируемой величины в изображениях:
Подставляя значения и через полиномы и разомкнутой САР получаем:
подставим значения для характеристического полинома получим выражение для динамического уравнения замкнутой САР в изображениях:
Переходя к оригиналам получаем символическую форму записи обыкновенного дифференциального уравнения замкнутой САР:
Решение диференциального уравнения состоит из двух частей:
где: — собственная часть, решение однородного дифференциального уравнения ;
— вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
Решения однородного уравнения замкнутой САР:
записываем соответствующее характеристическое уравнение:
находим корни степенного уравнения если все корни уравнения разные:
Обычно находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
Необходимо отметить, что порядок дифференциального уравнения (5.2.3) равен «n», т.е. такой же, как и у разомкнутой САР
если нет возмущающего воздействия, т.к. порядок дифференциального оператора L(p) обычно значительно выше, чем N(p).
По аналогии с выводом уравнения (5.2.3) можно получить уравнение динамики для рассогласования :
подставляя значения и (см. 5.6 и 5.9) получаем:
Уравнение (5.2.5)- уравнение динамики замкнутой САР в ихображениях для рассогласования (ошибки) при наличии управляющего и возмущающего воздействий.
Особенностью данного уравнения (5.2.5) является то, что левая часть его практически совпадает с левой частью (5.2.2), в то время, как порядок правой части заметно выше , т.к. порядок многочленов D (s) и L (s) — одинаков, а порядок N(s) меньше L(s).
Это означает, что внешние воздействия и влияют на более сильным образом.
Дифференциальное уравнение замкнутой САР для ошибки:
Способы решения уравнения ( 5.2.6 ) такие же, как и для уравнения ( 5.2.3 ) .
5.3. Частотные характеристики замкнутой САР.
Наибольший интерес при анализе замкнутых САР имеет АФЧХ замкнутой САР по управляющему воздействию:
где передаточная функция:
Учитывая, что — комплексное число, по аналогии имеем:
Где — вещественная часть функции, — мнимая часть функиции.
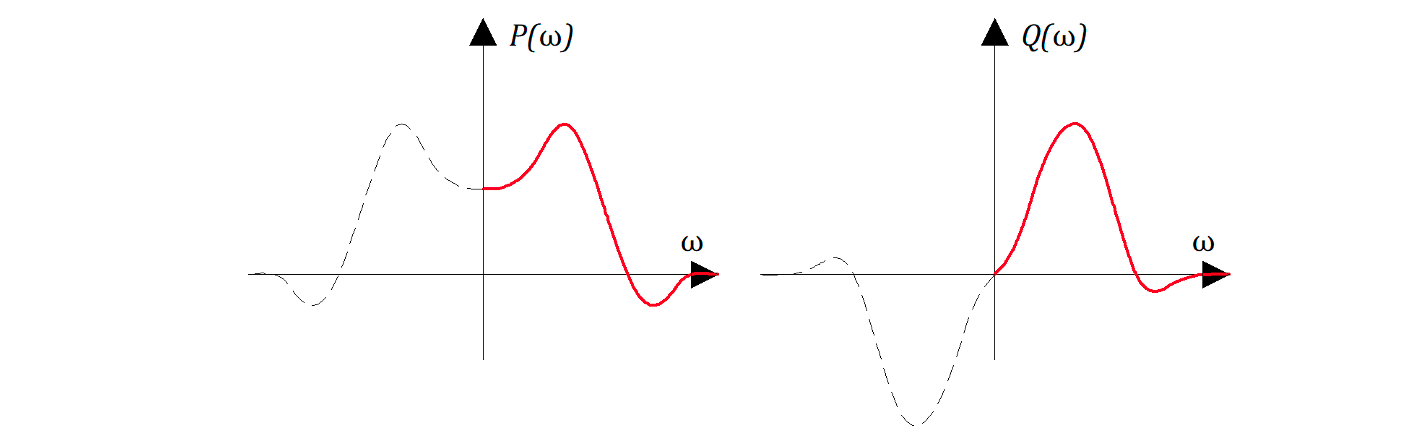
Рисунок 5.3.1 Пример зависмостей P и Q
На этих рисунках представлен «примерный» вид зависимостей P (w)и Q(w) для «какой-то» замкнутой САР причем P(w) — четная функция, т.е. P(w) = P(-w); Q(w) — нечетная функция, т.е. Q(w) = — Q(-w).
Если известны частотные свойства разомкнутой САР, то можно определить частотные свойства замкнутой САР. Воспользуемся показательной формой для АФЧХ
Где — амплитуда (модуль), — сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:
Приравнивая чисто вещественные и чисто мнимые части, имеем
Для нахождения амплитуды и сдвига фазы замкнутой передаточной функции как функции от амплитуды и сдвига фазы разомкнутой системы. Разделив (2) на (1) получим:
Сдвиг фазы замкнутой системы через характеристики разомкнутой системы:
Для получения амплитуды замкнутоей системы возведем оба уравнения системы (5.3.5) в квадрат:
складываем эти два уравнения:
Аналогичным образом можно выразить, например, P(w) и Q(w) — характеристики замкнутой САР через u(w) и u(w) — характеристики разомкнутой САР.
Пример
В качестве примера на рисунке 5.4.1 приведена модель помещения, в котором с помощью интегрирующего звена обеспечивается подвод тепла для поддержания температуры. Температура задается в виде ступенчатой функции. В качестве внешнего воздействия используется внешняя температура.
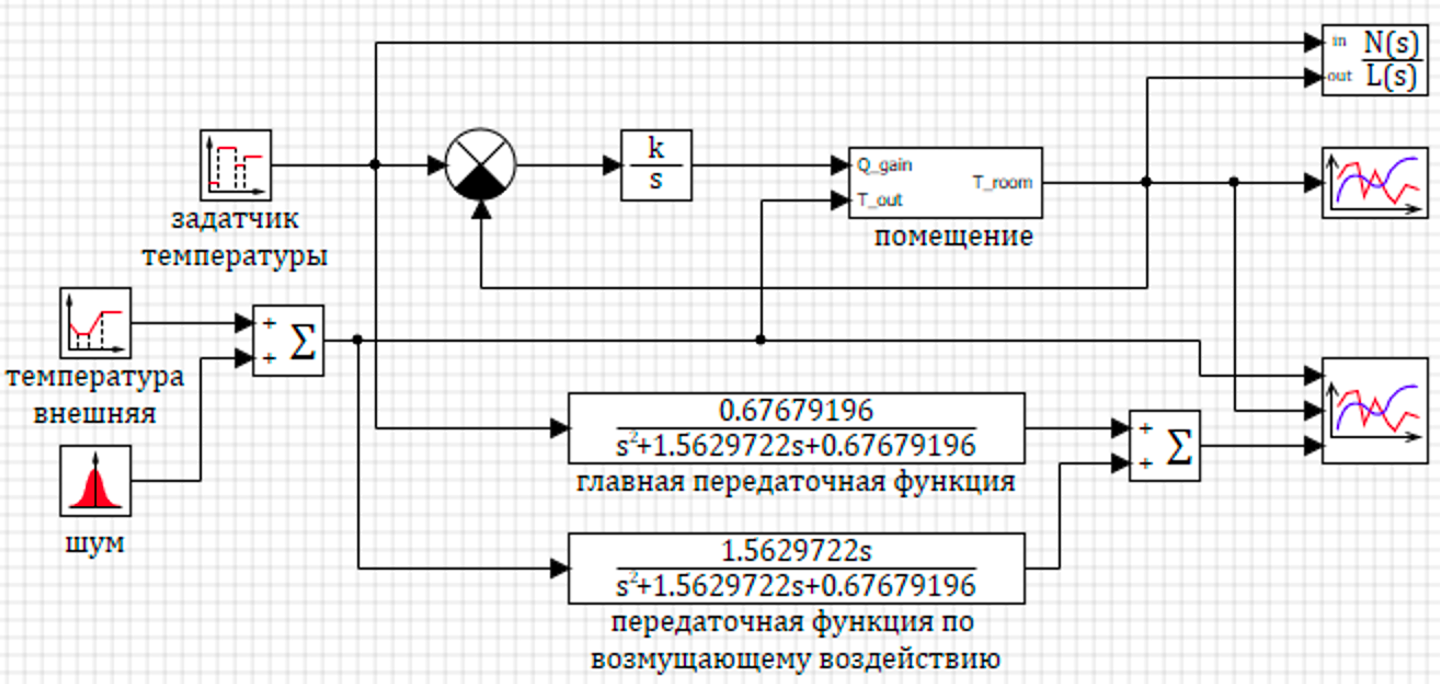
5.4.1 Рисунок сравнение физической модели и передаточных функций
Передаточные функции построены средтвами автоматического анализа. Видно, что знаменатель главной передаточной функции и знаменатель передаточной функции по возмущающиму воздействию одинаковы.
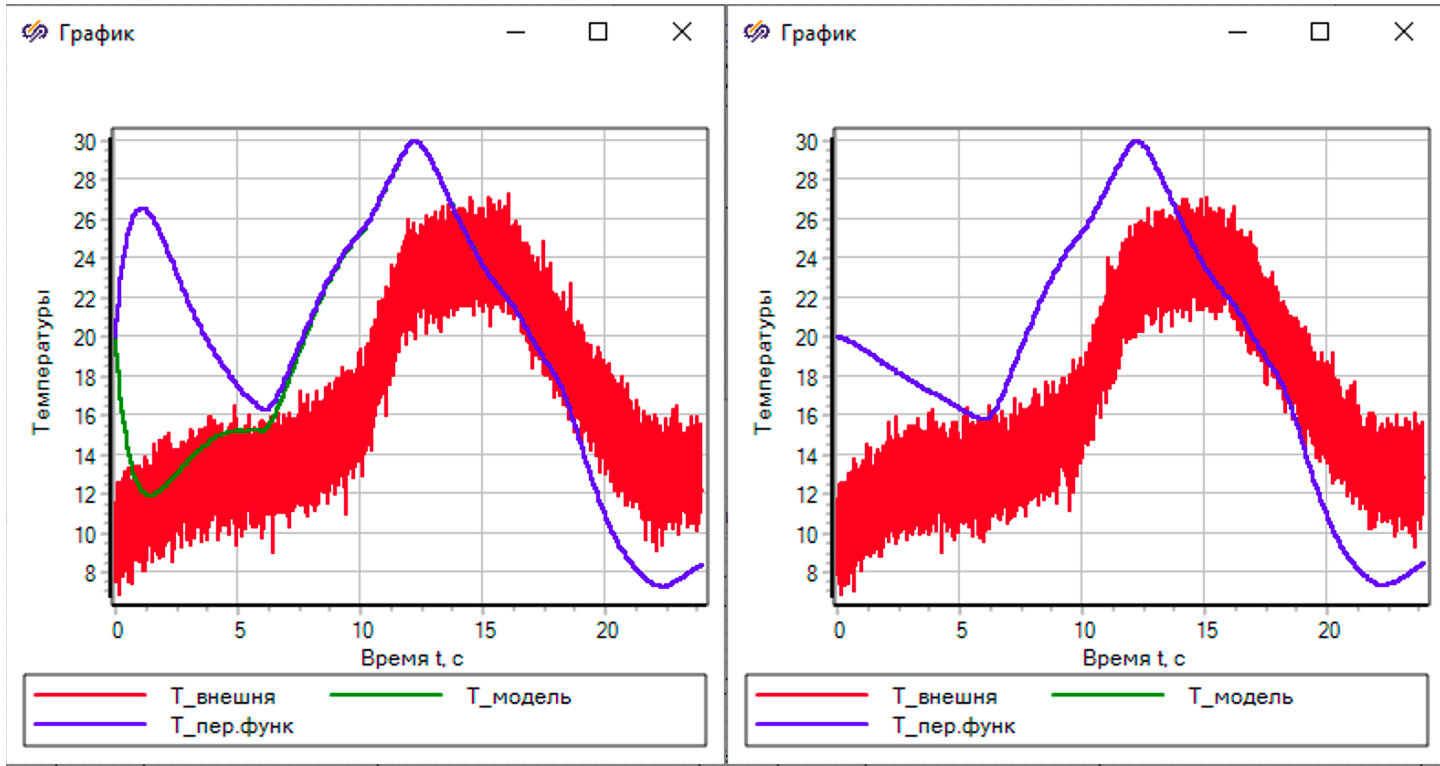
5.4.2 Результаты моделирования.
График справа показывает расхождение результаты модели (зеленая линия) и передаточных функций (синит линя) в начале расчета, но потом функции сходятся. Расхождение объясняются разными начальными условиями по производным. Слева тот же самый график, но в это случае начальное состояние определено с помощю загрузки стационарного состояния, полученного предварительным моделированием. В этом случае совпадение модели и передаточных функций полное.