Полюсная пара в асинхронном двигателе что это такое
Коэффициент скольжения при номинальной нагрузке для стандартных асинхронных двигателей колеблется в пределах 2-3%, для асинхронных двигателей с чрезмерным скольжением он может достигать 10% и более при номинальной нагрузке.
Полюсные пары в асинхронном двигателе что это такое
Изобретателем асинхронного двигателя считается Михаил Осипович Доливо-Добровольский, получивший в 1889 году патент на двигатель с ротором “беличья клетка”, а в 1890 году – на двигатель с фазированным ротором, оба из которых используются до сих пор без особых конструктивных изменений. Галилео Феррарис и Никола Тесла независимо друг от друга провели первые исследования и разработки в этой области в 1888 году.
Основным отличием разработки Доливо-Добровольского от разработки Теслы было использование трехфазной, а не двухфазной конструкции статора. Первые двигатели были продемонстрированы на Международной электротехнической выставке во Франкфурте-на-Майне в сентябре 1891 года. Там были представлены три трехфазных асинхронных электродвигателя, самый мощный из которых имел мощность 1,5 кВт. Конструкция этих машин была настолько удачной, что до настоящего времени они не претерпели никаких серьезных изменений.
Определение асинхронной машины следующее:
Асинхронная машина – это электрическая машина переменного тока, в которой скорость вращения ротора не равна скорости магнитного поля, создаваемого обмотками статора.
Как определить скорость вращения электродвигателя?
Под частотой вращения асинхронного электродвигателя обычно понимается угловая скорость его ротора, которая указывается на заводской табличке двигателя как число оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, добавив конденсатор параллельно одной или двум обмоткам, в зависимости от напряжения сети, но конструкция двигателя при этом не изменится.
Если ротор под нагрузкой делает 2760 об/мин, угловая частота двигателя будет 2760*2pi/60 радианов в секунду, или 289 рад/с, что неудобно для восприятия, поэтому на этикетке просто написано “2760 об/мин”. Для асинхронного двигателя это скорость с учетом проскальзывания.
Синхронная скорость данного двигателя (без учета скольжения) будет равна 3000 об/мин, так как при питании обмотки статора сетевым током частотой 50 Гц каждую секунду магнитный поток будет совершать 50 полных циклических изменений, а 50*60 = 3000, поэтому получается 3000 об/мин – синхронная скорость асинхронного двигателя.
В этой статье мы обсудим, как определить синхронную скорость неизвестного асинхронного трехфазного двигателя, глядя на статор. Вы можете легко определить синхронную скорость электродвигателя по внешнему виду статора, расположению обмоток и количеству пазов, если у вас нет под рукой тахометра. Поэтому давайте начнем с самого начала и разберем дело на примерах.
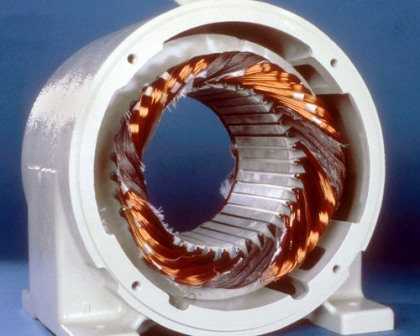
Асинхронные двигатели (см. – Типы двигателей) обычно описываются как имеющие одну, две, три или четыре пары полюсов. Минимум – одна пара полюсов, поэтому минимум – два полюса. Взгляните на рисунок. Здесь видно, что статор имеет две катушки, расположенные последовательно для каждой фазы – в каждой паре катушек одна находится напротив другой. Эти катушки образуют пару полюсов на статоре.
Для наглядности одна из фаз показана красным цветом, вторая – зеленым, а третья – черным. Обмотки всех трех фаз расположены одинаково. Поскольку три обмотки питаются поочередно (трехфазный ток), за одно колебание из 50 в каждой фазе – магнитный поток статора один раз поворачивается на полные 360 градусов, т.е. делает один оборот за 1/50 долю секунды, поэтому в секунду получается 50 оборотов. В результате получается 3000 оборотов в минуту.
Таким образом, становится ясно, что для определения синхронного вращения асинхронного электродвигателя достаточно определить количество пар полюсов, что легко сделать, сняв крышку и посмотрев на статор.
Разделите общее количество пазов статора на количество пазов на секцию обмотки одной фазы. Если получается 2, то перед вами биполярный двигатель с одной парой полюсов. Следовательно, синхронная частота составляет 3000 об/мин или около 2910 с учетом скольжения. В простейшем случае имеется 12 пазов, по 6 пазов на катушку, и таких катушек 6 – по две на каждую из трех фаз.
Обратите внимание, что количество витков в группе для одной пары полюсов может быть не обязательно 1, но также 2 и 3, но мы включили в пример одиночные группы на пару обмоток (в этой статье мы не будем рассматривать методы намотки).

Для достижения синхронной скорости 1500 об/мин число полюсов статора удваивается, так что за 1 колебание в 50 магнитный поток сделает только половину оборота – 180 градусов.
Для этого на каждую фазу изготавливается по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, мы имеем двигатель с двумя парами полюсов, образованных четырьмя катушками на фазу.
Например, одна катушка занимает 6 гнезд из 24, или 12 из 48, поэтому мы имеем двигатель с синхронной частотой 1500 об/мин, или скольжением, около 1350 об/мин. На представленном рисунке каждая секция обмотки выполнена в виде группы из двух катушек.
Как вы уже поняли, для достижения синхронной частоты 1000 об/мин каждая фаза уже образует три пары полюсов, так что за одно колебание в 50 (герц) магнитный поток повернется только на 120 градусов и соответственно повернет ротор за ним.
Таким образом, в статоре устанавливается минимум 18 катушек, причем каждая катушка занимает одну шестую часть всех пазов (шесть катушек на фазу – три пары). Например, если имеется 24 слота, одна катушка будет занимать 4 из них. Из этого следует, что скорость скольжения составляет около 935 оборотов в минуту.
Для достижения синхронной скорости 750 об/мин необходимо три фазы, чтобы создать четыре пары подвижных полюсов на статоре, таким образом, 8 катушек на фазу – одна напротив другой – 8 полюсов. Если, например, на каждые 6 пазов приходится по катушке на 48 пазов – мы имеем асинхронный двигатель с синхронной скоростью 750 (или около 730 с учетом скольжения).
Наконец, чтобы получить асинхронный двигатель с синхронной скоростью 500 об/мин, необходимо 6 пар полюсов – 12 катушек (полюсов) на фазу, так что при каждом смещении сетки магнитный поток поворачивается на 60 градусов. Так, например, если статор имеет 36 пазов, по 4 паза на катушку, то мы имеем трехфазный двигатель с 500 об/мин (480 с учетом скольжения).
См. также: Как отличить асинхронный двигатель от двигателя постоянного тока
Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.
Сколько полюсов имеет трехфазный асинхронный двигатель с короткозамкнутым ротором?

Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.

Столбы или провода? Полюса варьируются от двигателя к двигателю, а выходов может быть 3 (при соединении “вай-фай”) или 6 (при соединении “вай-треугольник” или “треугольник”).

Мне нужно знать, сколько полюсов (см. вопрос) для выбора частоты
Посмотрите паспорт двигателя, снимите крышку и посчитайте. Трехфазный, 6,9,12,15,18 может быть.
Трехфазные двигатели – это бесполюсные двигатели. У них нет четких полюсов – просто посмотрите на статор. Именно поэтому их магнитное поле вращается.
Третья группа асинхронных двигателей – это те, в которых ротор вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
Устройство и принцип работы трехфазных электродвигателей
В данной статье рассматриваются следующие вопросы:
- Конструкция трехфазного электродвигателя.
- Принцип работы трехфазного электродвигателя.
Конструкция электродвигателя 380 В
Асинхронные электродвигатели с короткозамкнутым ротором являются наиболее распространенными среди трехфазных электродвигателей в промышленности, сельском хозяйстве и быту благодаря своей простоте, надежности и низкой стоимости. Поэтому мы рассмотрим его устройство и принцип работы на примере этого двигателя.
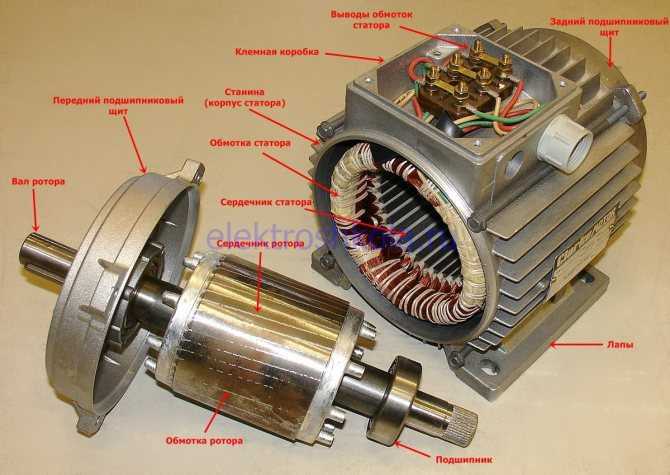
Асинхронный электродвигатель состоит из двух основных частей: статора и ротора.
Статор – это неподвижная часть электродвигателя. Он состоит из следующих компонентов:
- Рама (корпус), которая обычно имеет ребра жесткости для лучшего охлаждения, поскольку сердечник статора и обмотки нагреваются во время работы. Рама также оснащена ножками для защиты двигателя.
- Сердечник статора – изготовлен из отдельных листов электротехнической стали для снижения потерь на вихревые токи (токи Фуко), имеет зубчатую форму (пазы) и имеет следующий вид:
- обмотки статора – изготовлены из медных проводов, которые помещаются в пазы сердечника, концы обмоток выводятся в клеммную коробку для подключения к сети.
Ротор – это вращающаяся часть электродвигателя. Ротор состоит из следующих компонентов:
- Вал – изготовлен из стали и служит для передачи механической энергии рабочему механизму.
- Сердечник ротора – установлен на валу, аналогично сердечнику статора, изготовлен из отдельных листов электротехнической стали
- Короткозамкнутые обмотки ротора обычно имеют короткозамкнутый тип, часто называемый “путевыми обмотками” из-за их внешнего сходства Короткозамкнутая обмотка ротора имеет следующий вид:
Ротор удерживается в центре статора подшипниковыми пластинами.
Принцип работы трехфазного электродвигателя
Принцип работы электродвигателя довольно прост и основан на принципе вращающегося электромагнитного поля.
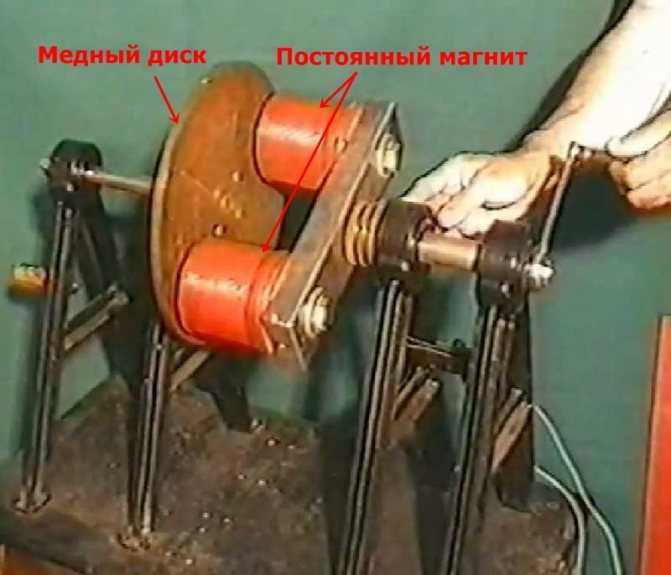
На рисунке выше показан медный диск, прикрепленный к валу на подшипнике напротив постоянного магнита. Если мы начнем вращать постоянный магнит, то его магнитное поле, пересекающее медный диск, также начнет вращаться, т.е. будет создано вращающееся магнитное поле, которое, согласно закону электромагнитной индукции, будет создавать индукционные токи в медном диске. Эти токи, протекая через диск, создают собственное электромагнитное поле, которое, в свою очередь, взаимодействует с вращающимся магнитным полем постоянных магнитов, заставляя диск вращаться.
Трехфазный электродвигатель работает таким же образом, но со специальным расположением обмоток статора, которые смещены друг относительно друга на 120° в пространстве, такое расположение создает вращающееся электромагнитное поле, когда через него протекает трехфазный ток.
Видео, демонстрирующее воздействие электромагнитного поля вращающегося статора на металлическую цепь (в данном случае цепь представляет собой простой диск):
Вращающееся магнитное поле статора, воздействуя на обмотку ротора, вызывает в обмотке статора индукционные токи, которые, протекая через обмотку ротора, создают собственное электромагнитное поле, и взаимодействие этих полей вызывает вращение ротора.
Как и магнит, статор электродвигателя имеет полюса, но в отличие от постоянного магнита, в электродвигателе может быть более двух полюсов, всегда с четным числом. Количество полюсов в статоре напрямую влияет на скорость вращения магнитного поля и, следовательно, на скорость вращения ротора. Скорость вращения магнитного поля (синхронная частота) определяется по формуле:
n=60*f/p
где: f – частота тока в станах СНГ 50 Гц (герц); p – количество пар полюсов.
Чем больше полюсов имеет двигатель, тем ниже частота его вращения. В качестве примера рассчитаем частоту вращения электродвигателя с четырьмя полюсами:
Четыре полюса представляют собой соответственно 2 пары полюсов:
Т.е. синхронная скорость магнитного поля статора составляет 1500 об/мин, а скорость ротора будет несколько ниже, т.е. 1400-1450 об/мин.
Относительная величина отставания скорости вращения ротора от скорости вращения магнитного поля статора называется скольжением, выражается в процентах и задается формулой:
S=(n1-n2)/n1*100%
где: n1 – синхронная скорость, об/мин; n2 – скорость вращения ротора (асинхронная скорость), об/мин.
Видеоролик, описывающий устройство и принцип работы трехфазного асинхронного электродвигателя с короткозамкнутым ротором:
Заинтересовала ли вас эта статья? А может быть, у вас все еще есть вопросы? Пишите в комментариях!
Вы не нашли статью по интересующей вас теме тема, связанная с электротехникой? Пишите нам сюда. Мы ответим вам.
где: Δtism – абсолютная погрешность длительности временного импульса (от нестабильности генератора опорной частоты); пх – измеренная скорость; тизм – длительность временного импульса (в нашем примере это 1 секунда).
Определение технических характеристик асинхронного двигателя
В данной статье рассматривается расчет параметров асинхронного двигателя, которые не указаны на заводской табличке двигателя, а именно: количество пар полюсов (количество пар катушек на фазу), скольжение при номинальной нагрузке, полная мощность, активная мощность и потери в двигателе при номинальной нагрузке.
На заводской табличке асинхронного двигателя с короткозамкнутым ротором типа AIR71V4U2 приведены следующие символы:
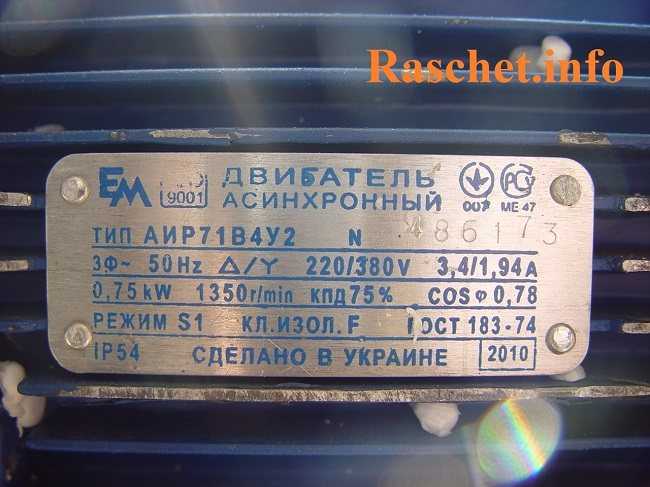
- ∆/Y – схема подключения обмотки двигателя;
- 220/380 В; 3,4/1,94 А – при схеме соединения треугольником обмотки статора должны быть подключены к 220 В, при схеме соединения звездой обмотки статора подключаются к 380 В, соответственно, и переменный ток составит 3,4 А для соединения треугольником при напряжении 220 В, и 1,94 А для соединения звездой.
Фактические данные можно проверить с помощью формул:
Для соединения звездой:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % – коэффициент полезного действия, характеризует отношение номинальной (полезной) мощности, развиваемой на валу, к активной мощности, которую он потребляет из сети. Он определяется по формуле:
- sosϕ = 0,78 – коэффициент мощности; чтобы рассчитать его, просто разделите активную мощность P на полную мощность S:
Уточнив технические данные, указанные на заводской табличке двигателя, переходим непосредственно к определению значений, о которых шла речь в начале статьи.
1. определите количество пар полюсов по формуле:
Если вам нужно узнать количество полюсов, формула будет выглядеть следующим образом:
Где: f = 50 Гц – частота переменного тока;
Определите скольжение при номинальной нагрузке:
где: n1 – синхронная скорость двигателя в зависимости от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определите полную мощность двигателя при номинальной нагрузке.
4. определить активную мощность, потребляемую двигателем при номинальной нагрузке:
5. определите потери в двигателе при номинальной нагрузке:
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и хотите отблагодарить автора этой статьи за его труд, вы можете воспользоваться платформой перевода средств “WebMoney Funding”.
Этот проект поддерживается и развивается исключительно на средства добровольных пожертвований.
Проявляя свою лояльность к сайту, вы можете пожертвовать любую сумму денег, таким образом вы поможете улучшить сайт, увеличить регулярность появления новых интересных статей и оплатить постоянные расходы, такие как: оплата хостинга, доменное имя, SSL сертификат, зарплата наших авторов.
В этом примере я буду рассчитывать ток утечки в сети при выборе УЗО для защиты водонагревателя.
В этой статье я рассмотрю 2 примера определения падения напряжения на воздушной линии 10 кВ.
Основная задача токоограничивающего дросселя (далее – реактора) – ограничить ток короткого замыкания ниже дросселя, при.
Согласно техническому заданию на проектирование подстанции 110/35/10кВ “Радуга”, расположенной в АР.
Я хотел бы представить таблицу с расчетными формулами для определения основных параметров мощности.
Отправляя это сообщение, вы соглашаетесь на сбор и обработку персональных данных. Политика конфиденциальности.
Для этого метода регулирования используются преобразователи частоты. Если частота изменяется для поддержания постоянная магнитного потока (а для этого мы должны поддерживать постоянным отношение U/f), мы получаем семейство механических характеристик с одинаковой жесткостью и перегрузочной способностью.
Преимущества: плавное управление, отличная экономическая эффективность, возможность повышения частоты выше 50 Гц (частота сети).
Как выбрать электродвигатель?
Обмотка ротора
- Короткое замыкание ротора (беличья клетка)
- Ротор с фазной обмоткой: обмотка ротора намотана на контактные кольца, которые вращаются вместе с валом двигателя. В цепи ротора используются металлографитовые щетки для привода реостата. Этот реостат можно использовать для снижения пускового тока и регулирования скорости вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена звездой или треугольником.
Если на заводской табличке двигателя указано: 220/380, D/Yнаписано на заводской табличке двигателя, это означает, что двигатель может быть подключен к сети с напряжением Uл = 220 В в треугольной конфигурации, а при Uл = 380 В по схеме “треугольник”.
Двигатели IEC поставляются со стандартным напряжением 230/400 В, в то время как стандартное напряжение для отечественных двигателей составляет 220/380 В.
Размер
Размер рамы – это расстояние в миллиметрах “от пола” до вала двигателя. Отечественные (ГОСТ) и импортные (IEC, NEMA) двигатели обычно не совпадают по размерам – наши двигатели ниже импортных двигателей той же мощности.
Материал корпуса (рама)
- Алюминий
- Чугун.
Эффективность
КПД η – это механическая мощность на валу двигателя P2 к электрической мощности P1.
Выходная мощность равна только входной мощности.
Класс эффективности
- EFF1 (высокоэффективные двигатели)
- EFF2 (Эффективные двигатели)
- EFF3 (двигатели с обычным КПД).
Варианты монтажа
- Ножки вставляются в корпус или крепятся болтами.
- Фланец с выбитыми (малые фланцы) или сквозными отверстиями (большие фланцы).
- Комбинация лап и фланцев.
Защита корпуса двигателя IP
Класс защиты двигателя IP55 является стандартным.
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p – количество пар полюсов двигателя,
f – частота сети (50 Гц).
- 2-полюсный двигатель – 3000 об/мин (стандарт).
- 4-полюсный – 1500 об/мин (стандарт)
- 6 полюсов – 1000 об/мин
- 8 полюсов – 750 об/мин
- 10 полюсов – 600 об/мин
- 12 полюсов – 500 об/мин
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
где s представляет собой скольжение.
Многоскоростные двигатели – это двигатели, в которых ступенчатое изменение скорости осуществляется путем изменения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя на высоте более 1000 м и работе при более высокой температуре окружающей среды необходимо рассмотреть возможность снижения мощности двигателя (derating) (для этого существуют специальные таблицы).
Тепловой класс изоляции
- B – 130° C
- F – 150° C (достаточно для работы с частотным преобразователем)
- H – 180° C
Номинальные параметры двигателя для всех классов изоляции приведены для температуры охлаждения +40°C.
Производительность
- S1 – непрерывный: двигатель работает при фиксированной температуре.
- S2 – кратковременный: двигатель не успевает достичь заданной температуры, но успевает полностью остыть при выключении
- S3 – прерывистый: работа с постоянной нагрузкой, чередующейся с отключением, при этом двигатель не успевает прогреться или остыть до постоянной температуры.
- S4 – Прерывистый с длительным запуском: двигатель не успевает прогреться или остыть до установившейся температуры
- S5 – Прерывистый при длительных перезапусках и электрическом торможении: Двигатель не нагревается и не охлаждается до установившейся температуры.
- S6 – Прерывистый: непрерывная работа под нагрузкой, чередующаяся с холостым ходом, при этом двигатель не прогревается и не охлаждается до установившейся температуры
- S7 – прерывистый с длительными запусками и остановками: двигатель не нагревается и не охлаждается до устойчивой температуры.
- S8 – прерывистый с прерывистым изменением скорости: двигатель не нагревается и не охлаждается до установившейся температуры
Тепловая защита двигателя
- Терморезисторы PTC – это резисторы, сопротивление которых кратковременно увеличивается при заданной температуре. От 1 до 3 термисторов соединены последовательно для сигнализации температуры срабатывания (Trip), например, 155°C. Другая цепочка термисторов может быть настроена на сигнал тревоги (Alarm), например, 145°C.
- Платиновые датчики температуры PT100 характеризуются высокой устойчивостью к окислению и высокой точностью измерений. PT100 может быть подключен в 2-, 3- или 4-проводной конфигурации (больше проводов означает меньше помех).
В обмотке статора можно установить от 3 до 6 датчиков PT100.
Для измерения температуры подшипника можно использовать дополнительно 2 датчика PT100. - KTY – кремниевые датчики температуры с положительным сопротивлением, характеризующиеся высокой линейностью, быстрым откликом, надежной полупроводниковой конструкцией и низкой стоимостью.
Коэффициент обслуживания
Двигатели с коэффициентом обслуживания 1,1 могут непрерывно работать в диапазоне до 10% от номинального выходного крутящего момента.
Класс крутящего момента
Класс крутящего момента представляет собой коэффициент умножения пускового момента (для прямого пуска от сети) при сниженном на 5% напряжении:
- Класс 16 – 160%.
- Класс 13 – 130%.
- Класс 10 – 100%.
- Класс 7 – 70%.
- 5 класс – 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению активной мощности, потребляемой двигателем, к кажущейся мощности.
Активная мощность используется для выполнения полезной работы.
Видимая мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность потребляется при намагничивании двигателя.
Антиконденсатное отопление
Существует два способа просушки обмоток перед запуском двигателя во влажном помещении:
- Используйте двигатель со специальным встроенным нагревателем
- Приложите напряжение от 4 до 10% от номинала обмотки статора (чтобы протекало от 20 до 30% номинального тока), достаточное для испарения конденсата (применимо не ко всем двигателям). Некоторые преобразователи частоты способны это делать.
Охлаждение
- Поверхностное охлаждение (невентилируемое: без вентилятора)
- Самовентиляция (вентилятор на валу двигателя)
- Принудительное охлаждение (принудительное охлаждение: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для оборудования с турбинным приводом (вентиляторы и насосы, для которых крутящий момент на валу пропорционален квадрату скорости вращения), как правило, достаточно самовентиляции.
Двигатели, которые приводятся в действие преобразователями с постоянным крутящим моментом в течение длительного времени на низких скоростях, должны быть либо увеличенного размера, либо оснащены принудительным охлаждением.
Вентилятор
- Пластик
- Металл
- Металл с увеличенным моментом инерции
Требования к двигателям для работы с преобразователем частоты
- Класс температурной изоляции не ниже F
- Возможна принудительная вентиляция (см. выше)
- Изолированный подшипник на другом конце вала (рекомендуется для типоразмеров 225 и больше)
Подшипники
Если преобразователь частоты работает на частоте выше 50 Гц, срок службы подшипников сокращается.
В некоторых двигателях рабочая сторона вала оснащена плавающим подшипником, а нерабочая сторона – фиксирующим подшипником. В других случаях верно обратное (например, при соединении с коробкой передач).
В стандартной комплектации подшипники подпружинены в осевом направлении (вдоль вала) для обеспечения равномерной работы двигателя. Двигатели с радиально-упорными подшипниками не имеют такой пружины, поэтому всегда необходимо прикладывать радиальное усилие (перпендикулярное валу – например, от ремня), иначе подшипник быстро выйдет из строя.
Смазка
В целом, для двигателей типоразмера до 250, работающих на номинальной мощности, смазка рассчитана на весь срок службы подшипников.
На двигателе должен быть специальный ниппель для пополнения смазки.
Вал двигателя
Двигатель может иметь второй конец вала двигателя, который может передавать номинальный крутящий момент или меньший крутящий момент.
Другой конец вала несовместим с такими опциями, как датчик скорости и внешний вентилятор, возможно, тормоз.
Тормоз
При выборе тормоза следует обратить внимание на:
- Тип:
- статический (стопорный тормоз активируется только при неподвижном вале)
- Динамические (контролируемый тормозной момент, меньший износ в случае экстренного торможения)
Датчик скорости
Датчик скорости может быть герметично закрыт внутри корпуса (Incapsulated) или снаружи под защитным кожухом.
Вращающееся магнитное поле является фундаментальной концепцией в электродвигателях и генераторах.
Как самостоятельно проверить скорость вращения электродвигателя?
Часто, купив готовый электродвигатель, владелец автомобиля (и не только) позже обнаруживает, что на него нет никакой документации. В этом случае, как правило, необходимо самостоятельно определить скорость вращения электродвигателя, а многие, как показывает практика, не умеют этого делать. В этой статье вы узнаете, как самостоятельно определить скорость вращения электродвигателя и что об этом нужно знать.
Пошаговое руководство по определению числа оборотов
1. В настоящее время асинхронные электродвигатели делятся на три группы, каждая из которых определяет индивидуальную скорость вращения ротора в минуту. Первая группа – это электродвигатели, совершающие 1000 оборотов в минуту. Стоит сразу отметить, что эта цифра несколько преувеличена, так как двигатель является асинхронным.
Обычно он делает около 950-970 оборотов, но для удобства эксперты решили округлить эти цифры. Вторая группа – это двигатели со скоростью вращения ротора 1500 оборотов в минуту. Это число также округлено, на самом деле двигатель делает 1430-1470 оборотов в минуту.
Третья группа асинхронных двигателей – это группа, к которой относится деталь, ротор которой вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
(2) Чтобы определить число оборотов электродвигателя, необходимо сначала определить, к какой из перечисленных выше групп он относится. Для этого откройте одну из крышек и найдите под ней катушку обмотки. Помните, что такая катушка может состоять из одной части или нескольких, особенно трех или четырех. Также следует учитывать, что в электродвигателе может быть более одной такой катушки. Вам нужен только один, к поиску которого вы должны приложить минимум усилий.
3 Предупреждение. Катушки соединены между собой определенными деталями, которые иногда мешают приему нужной информации. Ни в коем случае не отсоединяйте ничего друг от друга. Внимательно посмотрите на выбранную вами деталь и попытайтесь приблизительно определить размер катушки по отношению к кольцу статора.
(4) Это расстояние не обязательно должно быть точным для определения скорости вращения электродвигателя. Для вас подойдет приблизительный расчет.
Если размер катушки покрывает примерно половину кольца статора, скорость вращения ротора составляет три тысячи оборотов в минуту.
Если размер катушки охватывает около трети кольца, двигатель будет относиться ко второй группе, и, следовательно, количество оборотов, которые он может сделать, не превысит 1500 в минуту.
Когда размер катушки равен четверти кольца – число оборотов электродвигателя составит 1000 оборотов в минуту, а значит, двигатель будет относиться к третьей группе.
Обратите внимание, что приведенные цифры являются лишь приблизительными, в реальности они могут отличаться, и это зависит от многих факторов.
Эти статьи обязательно пригодятся и вам:
Теперь посмотрите это полезное видео:
- Техника японского ленточного цветка – Канзаши
Техника японского ленточного цветка. Для тех, кто видел такие красивые ленты канзаши, можно научиться их делать. Цветы из атласных лент – канзаши.
-
Модульное оригами – схема складывания двойного лебедя
В этом уроке вы узнаете, что такое модульное оригами, а для изучения будет представлена схема складывания двойного лебедя.Как узнать количество полюсов асинхронного двигателя
Но иногда табличка отсутствует, либо прочесть ее невозможно. При эксплуатации двигатель неоднократно окрашивают, нередко – вместе с табличкой. Поэтому приходится определять его параметры методом измерений.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток – AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.

Трёхфазный переменный ток
Трёхфазное питание – это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

Для наглядности мы заменили ротор вращающимся магнитом, а статор – катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе – B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая – южным. Таким образом, если A1 – северный полюс, то A2 – южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.

Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.

Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z 1 / y, где 2р – количество полюсов, Z 1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z 1 b / h или 2 p = 0,5 D i / h,
где 2р – количество полюсов, Z 1 – число пазов, b – размер зуба, см, h – высота спинки, см, D i – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Содержание Предыдущий § Следующий 3-1. ЧИСЛО ПАР ПОЛЮСОВ. ШАГ ВИТКА
Для двигателей переменного тока (асинхронных и синхронных) число пар полюсов определяет скорость вращения, т. е. число оборотов в минуту. Оно определяется из следующей зависимости:
У асинхронных двигателей приведенное выше выражение определяет «синхронную» скорость вращения, которую двигатель развивает без нагрузки.
При нагрузке скорость вращения незначительно замедляется, появляется так называемое «скольжение».
Скольжение представляет собой разность между синхронным и действительным числом оборотов ротора в минуту, разделенную на синхронное число оборотов в минуту:
Величина скольжения при номинальной нагрузке для обычных асинхронных двигателей колеблется в пределах 2—3%, для асинхронных двигателей с повышенным скольжением она может достигать 10% и более при номинальной нагрузке.
Для того, чтобы синхронный генератор мог работать, число пар полюсов индуктора и рабочей обмотки1
должно быть одинаковым; то же относится к асинхронному двигателю с фазным ротором, у которого обмотки статора и ротора должны иметь одинаковое число пар полюсов.
Короткозамкнутый ротор асинхронного двигателя может работать при различном числе полюсов статорной обмотки.
Для того чтобы в обмотке образовалось требуемое число пар полюсов р, необходимо соединить проводники в витки-катушки (секции) и катушки между собой так, чтобы были выдержаны определенные расстояния
—
«шаги»
между сторонами (проводниками) витка-катушки и между самими катушками или их группами.должен быть равен полюсному делению (диаметральный шаг) или несколько меньше его (укороченный шаг).
Полюсное деление х
выражается числом пазов (или зубцов), приходящихся на полюс:
Шаг витка У также выражается числом пазов, лежащих между проводниками, образующими стороны витка.
Шаг витка должен быть близок к полюсному делению.
Если, например, нужно обмотать статор (ротор), имеющий 48 пазов, так, чтобы получить четырехполюс-ную обмотку, то полюсное деление будет равно:
Шаг катушек, следовательно, может быть взят равным 12 пазам или несколько меньше, например 10 пазам.
1 Рабочей (якорной) обмоткой генератора может быть как статорная, так и роторная. В последнем случае вырабатываемый ток подается через контактные кольца и щегки.
В первом случае стороны катушки расположатся в пазах 1 и 1 + 12=13, во втором случае — в пазах 1 и 1 + 10=11.
В первом случае будем иметь обмотку с диаметральным
шагом катушек, во втором случае — обмотку с
укороченным
шагом, равным 10/12, или 83% диаметрального.Укорочение составит, следовательно, 17% диаметрального шага.
Укорочение шага приводит к некоторому уменьшению э. д. с. (электродвижущей силы) витка, так как уменьшается его площадь, а следовательно, и охватываемый им магнитный поток, однако оно является весьма полезным, так как уменьшает длину лобовых соединений
и в результате расход меди и потери в обмотке и, кроме того,
улучшает форму кривой э. д. с.
Наиболее благоприятной формой кривой э. д. с. (т. е. кривой, которая изображает зависимость величины э. д. с. от времени) является синусоида. В этом случае электрические машины имеют минимальные потери и наилучшие характеристики. Форма кривой э. д. с. зависит от формы кривой магнитного потока, который эту э. д. с. индуцирует. Придать точно синусоидальную форму кривой магнитного потока весьма затруднительно, поэтому желательно, чтобы обмотка даже при несинусоидальном магнитном потоке давала бы синусоидальную э. д. с.Несинусоидальный магнитный поток можно представить себе состоящим из основного изменяющегося точно по синусоиде (он называется потоком первой гармоники) и имеющего заданное для машины число пар полюсоь и наложенных на него также синусоидальных потоков (т. н. высших гармонических) с числом пар полюсов в 2, 3, 4, 5, . . ., п
раз больше основного. Соответственно полюсное деление потоков высших гармонических в 2, 3, 4, 5, . . .,
п
раз меньше основного. В машинах, у которых северные и южные полюсы одинаковы, имеют место только иечетные 3, 5, 7, 9 и т. д. гармонические. Если укорочение шага составляет, напри-мер, 75=20% полюсного деления, то для 5-й гармонической это означает укорочение на 100%, т. е. целиком на однб полюсное деление 5-й гармонической. При этом виток будет охватывать две положительные и две отри-цательные полуволны 5-й гармоники и, следовательно, общий поток 5-й гармонической, охватываемой витком, и э. д. с. 5-й гармоники будут равны нулю.
Аналогичное положение создается для 3-й гармоники, если укоротить шаг на ‘/з полюсного деления. Поэтому при относительно небольшом уменьшении основной э. д. с. можно в сильной степени уменьшить э. д. с. от высших гармоник и получить, следовательно, близкую к синусоидальной э. д. с. витка.
При слишком большом укорочении шага начинает превалировать уже уменьшение основной э. д. с, что недопустимо. Поэтому укорочение шага обычно не превышает
Уз
полюсного деления,
т. е. шаг не берется менее 0,66 полюсного деления.Исключения составляют специальные обмотки, например обмотки для переключения на два числа полюсов.
В связи с тем что обмотки размещаются в пазах и проводимость воздушного зазора между зубцами и между пазами статора и ротора для магнитного потока получается различной (в особенности при открытых пазах), в кривой магнитного потока появляются так называемые зубцовые гармоники, отражающие пульсацию потока из-за изменения проводимости воздушного зазора. Очевидно, что исключить эти гармонические за счет укорочения шага нельзя, так как двойное полюсное деление зубцовой гармоники равно зубцовому делению и укорочение шага, равное полюсному делению этой гармоники означает необходимость положить виток, не в паз, а на зубец.
Радикальным способом борьбы с зубцовыми гармониками является скос пазов. Зубцовые гармоники могут быть уменьшены также за счет применения обмоток с дробным числом пазов на полюс и на фазу.
При выполнении обмоток стремятся обычно распределить витки на возможно большее число пазов, которые при этом получаются меньше.
Такое распределение обмотки позволяет получить меньший поток рассеяния, т. е. вредный для работы машины магнитный поток, который не проходит из ста-гора в ротор, а замыкается вокруг паза. Кроме того, сами зубцы и пазы становятся мельче, что уменьшает
зубцовые гармоники (пульсации). Улучшается и отдача тепла от обмотки к активной стали. С другой стороны, поскольку каждую катушку в пазу приходится изолировать, большое число пазов влечет за собой потерю места в пазах на изоляцию и соответственное уменьшение мощности, особенно в машинах с высоким напряжением. Эти соображения определяют выбор числа пазов. Свойства обмотки и ее схема в значительной степени зависят от числа пазов на полюс и фазу
—
q.
Содержание Предыдущий § СледующийКак выбрать электродвигатель
Обмотка ротора
- Короткозамкнутый ротор (беличья клетка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, вращающиеся с валом двигателя. С помощью металлографитовых щёток в цепь ротора включается пуско-регулирующий реостат. С помощью этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена по схеме «звезда» или «треугольник». Если на шильдике двигателя написано: 220/380, D/Y, то это значит, что двигатель можно включать в сеть с Uл = 220 В по схеме «треугольник», а с Uл = 380 В – по схеме «звезда».
Для IEC двигателей стандартное напряжение – 230/400 В, а для отечественных – 220/380 В.
Типоразмер
Типоразмер или габарит (Frame size) – это расстояние в миллиметрах «от пола» до оси вала двигателя. Типоразмеры отечественных двигателей (ГОСТ) и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного действия (Efficiency)
КПД η равен отношению механической мощности на валу двигателя P2 к потребляемой из сети электрической мощности P1.
P1 = √3 х U х I х cos φ P2 = M х n / 9,55 η = P2 / P1
Выходная мощность меньше входной на величину потерь.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное исполнение
- Лапы (Foot) литые с корпусом или прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) или со сквозными (большие фланцы)
- Комбинированные – лапы и фланец.
Конструктивное исполнение по способу монтажа электродвигателей
Класс защиты корпуса двигателя IP
Стандартная степень защиты электродвигателей – IP55.
Подробнее о расшифровке кодов IP
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость): n1 = 60f / p [об/мин], где p – число пар полюсов двигателя, f – частота сети (50 Гц).
- 2 полюса – 3000 об/мин
- 4 полюса – 1500 об/мин (стандарт)
- 6 полюсов – 1000 об/мин
- 8 полюсов – 750 об/мин
- 10 полюсов – 600 об/мин
- 12 полюсов – 500 об/мин.
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля: n2 = n1(1 – s), где s – скольжение.
Многоскоростные электродвигатели
– это двигатели, у которых ступенчатое изменение скорости реализовано с помощью переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя выше 1000 метров над уровнем моря и при эксплуатации при повышенной температуре окружающей среды необходимо учитывать снижение (Derating) мощности двигателя (для этого есть специальные таблицы).
Класс нагревостойкости изоляции
- B – 130° С
- F – 150° С (достаточно для работы от преобразователя частоты)
- H – 180° С
Номинальные характеристики двигателя для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Подробнее о классах нагревостойкости изоляции
Режим нагрузки (Duty)
- S1 – продолжительный: двигатель работает при установившейся температуре
- S2 – кратковременный: двигатель не успевает нагреться до установившейся температуры, но во время остановки успевает полностью охладиться
- S3 – повторно-кратковременный: работа с постоянной нагрузкой чередуется с выключениями, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 – повторно-кратковременный с длительными пусками: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 – повторно-кратковременный с длительными пусками и электрическим торможением: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 – перемежающийся: работа с постоянной нагрузкой чередуется с работой на холостом ходу, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 – перемежающийся с длительными пусками и торможениями: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 – перемежающийся с периодическим изменением скорости вращения: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
Тепловая защита двигателя
- PTC-термисторы – это резисторы, сопротивление которых мгновенно возрастает при достижении заданной температуры. От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C. Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C.
- PT100 – платиновые датчики температуры обладают высокой стойкостью к окислению и большой точностью измерения. PT100 подключаются по 2-х, 3-х или 4-х проводной схеме (чем больше проводов – тем меньше влияние помех). От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора. Для измерения температуры подшипников могут быть использованы ещё 2 датчика PT100.
- KTY – кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высокой линейностью характеристики, высоким быстродействием, надёжной твёрдотельной конструкцией и небольшой стоимостью.
Сервис-фактор
Двигатель с сервис-фактором 1.1 может постоянно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту показывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 – 160%
- Класс 13 – 130%
- Класс 10 – 100%
- Класс 7 – 70%
- Класс 5 – 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой двигателем активной мощности к полной мощности. Активная мощность расходуется на совершение полезной работы. Полная мощность равна геометрической сумме активной и реактивной мощности. Реактивная мощность расходуется на намагничивание двигателя.
Антиконденсационный нагрев
Для того, чтобы перед пуском двигателя в сыром помещении просушить обмотки есть два способа:
- Использовать двигатель со специальным встроенным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (чтобы пропустить ток от 20 до 30% от номинального), что достаточно для испарения конденсата (применимо не для всех двигателей). Некоторые преобразователи частоты умеют это делать.
Охлаждение
- Поверхностное охлаждение (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу двигателя)
- Принудительное охлаждение (Forced cooling: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости), как правило, достаточно самовентиляции. Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях, необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Классификация методов охлаждения электрических двигателей
Вентилятор
- Пластиковый
- Металлический
- Металлический с увеличенным моментом инерции
Требования к двигателю при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Возможно принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников уменьшается.
У одних двигателей с рабочей стороны вала установлен плавающий подшипник (Floating bearing), а с нерабочей стороны подшипник зафиксирован (Located bearing). У других – наоборот (для сочленения с редуктором, например).
В стандартном исполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы двигателя. У двигателей с радиально-упорными подшипниками такой пружины нет, поэтому радиальное усилие (перпендикулярно валу – от ремня, например) должно быть приложено постоянно, иначе подшипник быстро выйдет из строя.
Смазка
Как правило, для двигателей с типоразмерами до 250, работающих в номинальном режиме, смазка рассчитана на весь срок службы подшипников. Для пополнения смазки у двигателя должен быть предусмотрен специальный ниппель.
Вал двигателя
У двигателя может быть выведен второй конец вала двигателя, который может передавать как номинальный, так и меньший момент. Второй конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного охлаждения, а, возможно, и с тормозом.
Тормоз
При выборе тормоза необходимо учесть:
- Тип: статический (удерживающий тормоз срабатывает только при неподвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
Датчик скорости
Датчик скорости может находится герметично внутри корпуса (Incapsulated) или снаружи под защитной крышкой.
Устройства плавного пуска

Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Параметры электродвигателя №3: тип соединения обмоток
Это очень важный параметр трехфазного электродвигателя. Все шесть выводов начал и концов обмоток выведены в барно двигателя. Подключить их можно либо в звезду, либо в треугольник.
Рядом с символами «треугольник/звезда»
на табличке указывается номинальное напряжение
. Это означает, что при включении в сеть трехфазного тока напряжением 380 В обмотки двигателя нужно соединить в звезду. Ошибка в соединении приведет к выходу электродвигателя из строя.
Номинальный ток также указывается через дробь. В описанном случае необходимо значение, указанное в знаменателе.
Определение технических характеристик асинхронного двигателя
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя, которые не приводятся на щитке электродвигателя, а именно: число пар полюсов (число пар катушек на фазу), скольжение при номинальной нагрузке, полной мощности, активной мощности и потере в двигателе при номинальной нагрузке.
На щитке асинхронного двигателя с короткозамкнутым ротором типа АИР71В4У2 имеются следующие обозначения:

- ∆/Y – схема соединения обмоток двигателя;
- 220/380 В; 3,4/1,94 А — при схеме соединения обмоток статора в треугольник, мы должны подключатся к напряжению 220 В, при схеме соединения обмоток статора в звезду подключаем напряжение 380 В, соответственно и переменный ток будет равен для соединения в треугольник при напряжении 220 В – 3,4 А, а при схеме соединения в звезду – 1,94 А.
Проверить данные по току, можно рассчитав по формулам:
Для схемы соединения треугольник:
Для схемы соединения звезда:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % — коэффициент полезного действия, характеризуется отношением номинальной (полезной) мощности развиваемой на валу, к активной мощности, потребляемой им из сети. Определяется по формуле:
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсовЧислополюсов Синхронная частота вращения 50 Гц Синхронная частота вращения 60 Гц 2 3000 3600 4 1500 1800 6 1000 1200 8 750 900 12 500 600 Как определить число пар полюсов асинхронного двигателя?
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
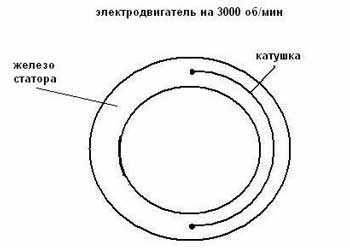
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
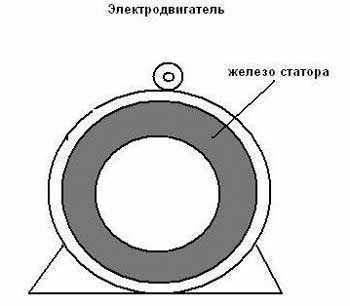
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
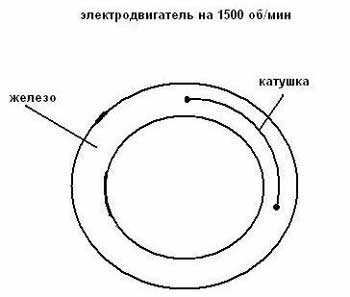
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту

Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Измерение скорости вращения
Измерение скорости вращения валов, шестерен, колес и других элементов, осуществляется, как правило, при помощи электронных тахометров. Типовая схема электронного тахометра приведена на рис. 26.
Тахометры измеряют скорость вращения n с размерностью . Уже первый взгляд на эту размерность позволяет понять, что тахометр должен выполнять два вида измерений одновременно. Во-первых, измерять количество оборотов (вала, шестерни, колеса и т.п.). Во-вторых, измерять время. Для выполнения таких измерений электронный тахометр (рис. 26) содержат электронный секундомер, фотоэлектрический датчик и логическое устройство ЛУ.
С устройством и работой электронного секундомера мы познакомились в предыдущем разделе. Теперь познакомимся с устройством и работой фотоэлектрического датчика. Он состоит из светодиода – излучателя СД, фотодиода – приемника ФД и формирователя электрических импульсов ФС1. Светодиод СД излучает свет на фоточувствительную поверхность фотодиода приемника ФД. При этом сопротивление фотодиода падает. Если на линии светового потока между светодиодом СД и фотодиодом ФД поместить непрозрачный материал, то сопротивление фотодиода ФД резко возрастет.

Рис. 26. Функциональная схема электронного тахометра
Это свойство фотоэлектрического датчика широко используется в технике и в измерениях. Для измерения скорости вращения между оптопарой – (светодиодом излучателем и фотодиодом приемником), помещают диск 1 с отверстиями, вращающийся на валу 2 (рис. 26). В процессе вращения вала 2 отверстия в диске будут прерывать световой поток между светодиодом СД и фотодиодом ФД. При этом сопротивление фотодиода ФД будет непрерывно изменяться синхронно с частотой вращения вала. Формирователь импульсов ФС1 реагирует на изменения сопротивления фотодиода, преобразуя каждое из их в стандартные по напряжению и длительности прямоугольные электрические импульсы на своем выходе (см. рис. 27, (а). Чем быстрее вращается диск 2, тем больше частота следования импульсов на выходе формирователя ФС1.
Теперь познакомимся с работой логического устройства ЛУ (рис. 26). Логическое устройство имеет два входа и один выход. Принцип его работы можно сформулировать как «2-И». То есть, если и на первый и на второй входы логического устройства ЛУ подано напряжение (условие «2-И» выполняется), то и на его выходе тоже будет напряжение. Если хотя бы на одном из входов ЛУ напряжения нет (условие два «И» не выполняется), то и на его выходе напряжения не будет. Данный принцип работы ЛУ хорошо иллюстрируют графики, представленные на рис. 27.

Рис. 27. Графики электрических импульсов при работе схемы электронного тахометра, (А) – импульсы на выходе формирователя ФС1 в точке А; (Б) – импульсы периодов времени счета (с выхода делительной декады ДД4); (В) – импульсы на выходе логического устройства (на входе в СчД1); (Г) – импульсы, обнуляющие счетные декады в момент начала нового периода счета
В процессе измерения тахометром скорости вращения вала 2 (рис. 26) на выходе формирователя ФС1в точке (А) вырабатываются электрические импульсы с частотой следования отверстий в диске 1. Эти импульсы подаются на первый вход логического устройства ЛУ. Одновременно с этим на второй вход ЛУ в точку (Б) от выхода делительной декады ДД4 поступают импульсы периодов времени счета.
Глядя на рис. 27. не трудно видеть, что условие «2-И» может периодически выполняться только в момент, когда на второй вход ЛУ в точку (Б) в течение 1 секунды подается напряжение 5 вольт. В это же время с выхода формирователя ФС1на первый вход ЛУ в точку (А) поступают электрические импульсы, вызванные вращением диска 2. Таким образом, на выходе логического устройства ЛУ в точке (В) формируются прямоугольные электрические импульсы, которые по внешнему виду повторяют импульсы, поступающие от формирователя ФС1. Они поступают на счетные декады СчД, поэтому этот режим называется «счет».
После периода счета импульсов, в течение следующего периода времени продолжительностью в 1 секунду, напряжение на втором входе ЛУ становится равным нулю. На выходе ЛУ напряжение тоже становится равным нулю, поскольку принцип «2-И» не выполняется. Счет не возможен. На счетных декадах в течение одной секунды отображается результат счета. Этот режим называется «индикация».
После режима «индикация» автоматическое устройство управления сбросом УУС (рис. 26) вырабатывает на своем выходе в точке (Г) короткий электрический импульс, который подается одновременно на входы обнулениявсехсчетных декад. Счетные декады обнуляются, и начинается новый режим счета. Таким образом, режимы «счет» и «индикация» циклически повторяются.
Чтобы по показаниям электронного тахометра определить скорость вращения вала, шестерни и пр., используют формулу:
где: N – результат счета на дисплеях счетных декад; k – количество отверстий в диске датчика; t – период времени счета.
Например, на дисплеях счетных декад электронного тахометра отобразилось число 2400. В диске датчика 80 отверстий. Период времени счета равен 1 секунде. В этом случае:
Если в окружности диска сделать 60 отверстий, а период времени счета будет равен 1 секунде, то с учетом того, что в 1 минуте 60 секунд, электронный тахометр будут показывать скорость вращения в размерности .
Абсолютная погрешность Δn измерения числа оборотов электронным тахометром вычисляется по следующей формуле:
где: Δtизм – абсолютная погрешность длительности импульса времени (от нестабильности генератора опорных частот); nх – измеренная скорость вращения; tизм – длительность импульса времени (в нашем примере он равен 1 секунде).
Относительную погрешность измерения числа оборотов электронным тахометром определим по формуле:
Например, необходимо определить абсолютную и относительную погрешности измерения числа оборотов электронным тахометром, если он показывает величину измеренной скорости вращения nх = 1000 об/мин, а абсолютная погрешность длительности импульса времени Δtизм = 0,0001 с. Используя формулу (2.19) определим абсолютную погрешность измерения числа оборотов электронным тахометром:
Циклическая частота вращения (обращения)
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Мощность электродвигателя
Электрическая мощность – это физическая величина, которая характеризуется скоростью преобразования ну или передачи электрической энергии. Чтобы облегчить понимание движение тока электрики представляют, как передвижение жидкости по трубе, а напряжение – с разницей положения ярусов этой жидкости. Электричество, так же, осуществляя работу, передвигается от высокой возможности к низкой, как и жидкость. Значит мощь электрики это количество работы, некая совершается за 1 секунду, или быстрота выполнения самой работы. Сумма тока электрики, которая прокладывается сквозь поперечный разрез цепи на протяжении одной секунды, это и есть сила тока в самой цепи.
Отсюда вытекает, что мощность электрическая равна в пропорции напряжению и силе тока в цепи. Для определения мощи тока принята единица – ватт, сокращенно — Вт. Для физических подсчетов принято было применять стандартную формулу N=A/t, где N – мощность, A – работа, t – время. Существует много вариантов данной формулы с разными буквенными обозначениями.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.

Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Уравнение напряжения и тока асинхронного двигателя
⇐ ПредыдущаяСтр 2 из 2
2.5. Процессы в асинхронной машине
2.5.1. Цепь статора
А) ЭДС статора.
Магнитное поле, создаваемое обмоткой статора, вращается относительно неподвижного статора с частотой n
0=60
f
)/
p
и будет наводить в обмотке статора ЭДС. Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:1=0.92÷0.98– обмоточный коэффициент;
f
1=
f
– частота сети;
w
1– число витков одной фазы обмотки статора; Φ – результирующее магнитное поле в машине.Б) Уравнение электрического равновесия фазы обмотки статора.
Это уравнение составлено по аналогии с катушкой с сердечником, работающей на переменном токе.
Здесь Ú и Ú1– напряжение сети и напряжение, подведённое к обмотке статора. R
1– активное сопротивление обмотки статора, связанное с потерями на нагрев обмотки.
x
1– индуктивное сопротивление обмотки статора, связанное с потоком рассеяния.
z
1– полное сопротивление обмотки статора. İ1– ток в обмотке статора.При анализе работы асинхронных машин часто принимают I
1
z
1=0. Тогда можно записать:Из этого выражения следует, что магнитный поток Φ в асинхронной машине не зависит от её режима работы, а при заданной частоте сети f
зависит только от действующего значения приложенного напряжения
U
1. Аналогичное соотношение имеет место и в другой машине переменного тока – в трансформаторе.Цепь ротора
А) Частота ЭДС и тока ротора.
При неподвижномроторе частота ЭДСf
2равна частоте сети
f
.При вращающемсяроторе частота ЭДС ротора зависит от частоты вращения магнитного поля относительно вращающегося ротора, которая определяется соотношением:
Тогда частота ЭДС вращающегося ротора:
Частота ЭДС ротора изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход.
Пусть при f
=50Гц, номинальное скольжение
S
н=2%. Тогда при номинальной частоте вращения ротора
f
2=
f
×
S
н=1Гц.Таким образом, в обмотке ротора асинхронной машины частота наводимой ЭДС зависит от частоты вращения ротора.
Б) ЭДС ротора.
При неподвижномротореf
2=
f
и действующее значение ЭДС определяется по аналогии с
E
1.2и
k
2– соответственно число витков и обмоточный коэффициент обмотки ротора.Если ротор вращается, то f
2=
f
×
S
ни ЭДС
вращающегосяротора определяется соотношением:
EЭДС, наводимая в обмотке ротора, изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход.
Отношение ЭДС статора к ЭДС неподвижного ротора называется коэффициентом трансформации асинхронной машины.
k
=E
1= w
1
k
1. E
2w
2
k
2В) ток ротора.
Запишем уравнение равновесия для одной фазы короткозамкнутого ротора.
При неподвижном роторе.
2=2π
fL
2– индуктивное сопротивление обмотки неподвижного ротора, связанное с потоком рассеяния;
R
2– активное сопротивление обмотки ротора, связанное с потерями на нагрев обмотки.При вращающемся роторе.
2
S
=2π
f
2
L
2=2π
fL
2
S
=
x
2
S
– индуктивное сопротивление обмотки вращающегося ротора.Для тока ротора в общем случае можно получить такое соотношение:
Отсюда следует, что ток ротора зависит от скольжения и возрастает при его увеличении, но медленнее, чем ЭДС.
Г) поле ротора
Обмотка ротора, как и обмотка статора, является многофазной и при появлении в ней тока создаёт своё вращающееся магнитное поле. Обозначим через n
2частоту вращения магнитного поля ротора относительно ротора.
– число пар полюсов обмотки ротора, оно всегда равно числу пар полюсов обмотки статора.
Относительно статора магнитное поле ротора вращается с частотой
Из полученного соотношения следует, что магнитное поле ротора относительно статора вращается с той же частотой, что и магнитное поле статора. Таким образом, магнитные поля ротора и статора относительно друг друга неподвижны. Поэтому при анализе работы асинхронной машины можно применить те же соотношения, что и трансформаторе.
Ток статора
Так как результирующее магнитное поле асинхронной машины не зависит от её режима работы, можно составить для одной фазы уравнение магнитодвижущих сил, приравняв магнитодвижущую силу в режиме холостого хода к сумме магнитодвижущих сил в режиме нагрузки.
Отсюда İ1=İ0+İ‘
0– ток в обмотке статора в режиме идеального холостого хода,
I’
2=−
I
2(
w
2
k
2)/(
w
1
k
1) – составляющая тока статора, которая компенсирует действие магнитодвижущей силы обмотки ротора. Полученное выражение для тока статора отражает свойство саморегулирования асинхронной машины. Чем больше ток ротора, тем больше ток статора. В режиме холостого хода ток статора минимальный. В режиме нагрузки ток статора возрастает. Ток реального холостого хода асинхронной машины
I
0=(20÷60)%
I
1ни значительно больше по сравнению с номинальным током, чем у трансформатора. Это объясняется тем, что величина тока
I
0зависит от магнитного сопротивления среды, в которой создаётся магнитное поле. У асинхронной машины, в отличие от трансформатора, есть воздушный зазор, который создаст большое сопротивление магнитному полю.К асинхронным машинам полностью применима формула для трансформаторной ЭДС. Пока ротор асинхронного двигателя неподвижен, его обмотка пересекается вращающимся магнитным полем с частотой n
1—фазное значение ЭДС, наводимой в обмотке статора;
E
2– фазное значение ЭДС, наводимой в обмотке ротора при неподвижном его состоянии (
s
= 1;
n
2= 0);
w1
,
w
2—число витков в фазных обмотках статора и ротора;
F
m—амплитудное значение магнитного потока фазы асинхронного двигателя;
k
1,
k
2—обмоточные коэффициенты статора и ротора асинхронного двигателя.Обмоточные коэффициенты всегда меньше единицы и в современных асинхронных машинах составляют 0,85 – 0,95. Они обусловлен тем, что в машине переменного тока витки обмотки распределены по внутренней поверхности статора и не одновременно пересекаются магнитным потоком. Поэтому ЭДС отдельных витков сдвинуты по фазе относительно друг друга и складываются не арифметически, как в трансформаторе, а геометрически (рис. 4).
При неподвижном роторе частота индуцируемой в его обмотке ЭДС равна частоте сетиf
1. По мере раскручивания ротора скорость (
n
1–
n
2) пересечения витков обмотки вращающимся магнитным полем уменьшается, а следовательно, уменьшается частота ЭДС в обмотке ротора
f2
=
p
(
n
1–
n
2)/60.Чтобы ввести скольжение в выражение для f
2, умножим числитель и знаменатель на
n
1:Таким образом, частота ЭДС в обмотке ротора прямо пропорциональна скольжению.
Теперь можно записать выражение для ЭДС обмотки ротора в общем случае:
Следовательно, ЭДС вращающегося ротора(E
2s) находится по ЭДС неподвижного ротора умножением его значения на скольжение, соответствующее данной частоте вращения ротора электродвигателя.
Зависимость значения величины и фазы тока от скольжения и от эдс в обмотке ротора
При работе асинхронного двигателя под действием ЭДС (E
2s), возникающей во вращающемся роторе, в цепи обмотки ротора возникнет ток
I
2s, который в соответствии с законом Ома для данной цепи найдется из выражения2s—полное сопротивление фазы ротора;
R
2—активное сопротивление фазы ротора. Для наиболее широко распространенных двигателей
R
2считают постоянным и независимым от частоты тока ротора;
Х
2s— индуктивное сопротивление фазы ротора при заданном скольжении ротора
s
и частоте тока ротора
f
2s:
X
2s=w2
L
2= 2p
f
2
L
2= 2p
sf
1
L
2=
s
w1
L
2
, здесьX
2
= w1L
2совпадает с индуктивным сопротивлением обмотки неподвижного ротора. С учетом того, что
E
2s=
sE
2и
X
2s= 2
pL
2
f
2s=
sX
2, получим выражение для тока ротора в другом виде:Из формулы видно, что ток ротора вращающегося двигателя можно определить через ЭДС неподвижного ротора. Индуктивное сопротивление X
2, входящее в выражение для тока ротора, соответствует частоте
f1
и является постоянным, а активное сопротивление электрической цепи ротора при этом зависит от скольжения и находится как отношение
R
2/
s
=
R
2
+R
2(1–
s
)/
s
.С учетом вышеприведенного, а также выражения для тока ротора схема замещения вращающегося ротора асинхронного электродвигателя может быть сведена к схеме замещения неподвижного ротора, представленной на рис. 5. Активное сопротивлениеR
2(1–
s
)/
s
можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. В этом случае асинхронный двигатель аналогичен трансформатору, работающему на внешнюю нагрузку, величина сопротивления которого определяется скольжением, а следовательно, механической нагрузкой на валу двигателя. Так, если нагрузочный момент на валу двигателя
М
= 0, то скольжение
s
= 0. При этом
R
2(1–
s
)/
s
=¥, что соответствует работе двигателя в режиме холостого хода. Если же нагрузочный момент на валу двигателя превышает его вращающий момент, то ротор останавливается (
s
= 1). При этом
R
2(1–
s
)/
s
= 0, что соответствует режиму короткого замыкания асинхронного двигателя.При построении схемы замещения асинхронного электродвигателя, параметры схемы замещения ротора, подобно тому, как это делается для вторичной обмотки трансформатора, приводят к числу витков и ЭДС обмотки статора электродвигателя. В результате полная схема замещения асинхронного двигателя имеет вид, представленный на рис. 6.
Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме замещения заменена электрической связью цепей статора и ротора. Сдвиг фаз между током и ЭДС ротора может быть определен по его схеме замещения (рис. 5).
При неподвижном роторе в момент запуска, когда s
= 1, ток и ЭДС ротора сдвинуты по фазе на максимальный угол, . По мере раскручивания ротора сдвиг фаз между
I
2и
E
2уменьшается. При
s
= 0 cosj2= 1.Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2′(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схемазамещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.
Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax соответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рабочие характеристики.Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 264. Рабочие характеристики асинхронного двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Вопрос
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Пусковые свойства двигателей
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п
= 0
до п .
Скольжение при этом меняется от
s
п = 1
до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (М
вр>
М
с
) и пусковой ток I
п
должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.Прямой пуск. Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s
= l
, а приведенный ток в роторе и равный ему ток статора
, (3.37)максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Значение пускового момента находится из (3.23) при s = 1:
.(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами. Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Двигатели с глубокими пазами. Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части. Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой. В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.
Двигатели с двойной клеткой. В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1
размещается обмотка из латунных проводников, во внутренних
2
– обмотка из медных проводников. Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой. Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Что такое количество пар полюсов в асинхронном двигателе
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту

Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Смотрите также: Как отличить асинхронный двигатель от двигателя постоянного тока
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Устройство и принцип работы трехфазных электродвигателей
В данной статье рассмотрены следующие вопросы:
- Устройство трехфазного электродвигателя.
- Принцип работы трехфазного электродвигателя.
Устройство электродвигателя 380 В
Наибольшее распространение в промышленности, сельском хозяйстве и быту среди трехфазных электродвигателей получили асинхронные электродвигателя с короткозамкнутым ротором благодаря их простоте устройства, надежности и дешевизне. Поэтому на примере именно такого электродвигателя мы и будем рассматривать их устройство и принцип работы.

Асинхронный электродвигатель состоит из двух основных частей: статора и ротора.
Статор — неподвижная часть электродвигателя. Он состоит из следующих элементов:
- станина (корпус) которая, как правило, выполняется ребристой для лучшего охлаждения, т.к. в процессе работы сердечник статора с обмотками нагреваются. Так же станина имеет лапы для крепления электродвигателя.
- сердечник статора — набирается из отдельных листов электротехнической стали для уменьшения потерь на вихревые токи (токи Фуко) и имеет зубчатую форму (пазы) и имеет следующий вид:
- обмотки статора — выполняются медными проводами которые укладываются в пазы сердечника, концы обмоток для подключения к электрической сети выводятся в клемную коробку.
Ротор — вращающаяся часть электродвигателя. Ротор состоит из следующих элементов:
- вал — выполняется из стали служит для передачи механической энергии на рабочий механизм.
- сердечник ротора — насаживается на вал, так же как и сердечник статора выполняется из отдельных листов электротехнической стали
- обмотка ротора — как правило имеет короткозамкнутое исполнение, часто короткозамкнутую обмотку ротора называют «беличьим колесом» из-за внешнего сходства. Короткозамкнутая обмотка ротора имеет следующий вид:
Ротор удерживается в центре статора подшипниковыми щитами.
Принцип работы трехфазного электродвигателя
Принцип работы электродвигателя довольно прост и основан на принципе вращающегося электромагнитного поля.

На рисунке выше представлен медный диск прикрепленный к валу на подшипнике напротив которого расположен постоянный магнит. Если начать вращать постоянный магнит то его магнитное поле пересекающее медный диск начнет так же вращаться, т.е. создастся вращающееся магнитное поле которое согласно закону электромагнитной индукции создают в медном диске токи индукции. Данные токи, протекая по диску, создают собственное электромагнитное поле, которое, в свою очередь, вступает во взаимодействие с вращающимся магнитным полем постоянных магнитов, что приводит к вращению диска.
Таким же образом работает и трехфазный электродвигатель, однако в нем вращающееся магнитное поле создается с помощью специального расположения обмоток статора, которые смещены в пространстве относительно друг друга на 120о, такое расположение при протекании по ним трехфазного тока приводит к возникновению вращающегося электромагнитного поля.
Видео воздействия вращающегося электромагнитного поля статора на металлический контур (в качестве контура в данном случае выступает обычное лезвие):
Вращающееся магнитное поле статора воздействуя на обмотку ротора приводит к возникновению в ней индукционных токов, которые протекая через обмотку ротора создают собственное электромагнитное поле, взаимодействие этих полейприводит ротор во вращение.
Так же как и магнит статор электродвигателя имеет полюса, однако в отличие от постоянного магнита полюсов в электродвигателе может быть больше двух, при этом их всегда четное количество. Количество полюсов в статоре напрямую влияет на скорость вращения магнитного поля и соответственно на скорость вращения ротора. Частота вращения магнитного поля (синхронная частота) определяется по формуле:
n=60*f/p
где: f — частота тока в станах СНГ частота тока составляет 50 Гц (Герц); p — количество пар полюсов.
Чем больше полюсов у двигателя тем меньше частота его вращения. Например, расчитаем частоту вращения электродвигателя с четырьмя полюсами:
Четыре полюса — это 2 пары полюсов, соответственно:
Т.е. синхронная частота вращения магнитного поля статора 1500 об/мин, при этом частота вращения ротора при этом будет немного меньше может составлять 1400-1450 об/мин.
Относительная величина отставания вращения ротора от частоты вращения магнитного поля статора называется скольжением, она выражается в процентах и определяется по формуле:
S=(n1-n2)/n1*100%
где: n1 — синхронная частота вращения, об/мин; n2 — частота вращения ротора (асинхронная частота вращения), об/мин.
Видео с описанием устройства и принципа действия трехфазного асинхронного электродвигателя с короткозамкнутым ротором:
Была ли Вам полезна данная статья? Или может быть у Вас остались вопросы? Пишите в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
Электродвигатели в составе мотор-редукторов.
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Как определить число пар полюсов асинхронного двигателя?
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.

4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.

Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.

Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
Теперь посмотрите это полезное видео:
- Японская техника изготовления цветов из лент – канзаши
Многие наверняка видели и уже имеют в своем гардеробе такие замечательные аксессуары из цветов канзаши. Эта статья научит вас технике их изготовления. Цветы из атласных лент – канзаси.
-
Модульное оригами — схема сборки двойного лебедя
В данном уроке вы узнаете что такое модульное оригами и для изучения будет представлена схема сборки двойного лебедя, которого вы сможете собрать своими руками.Как определить количество пар полюсов электродвигателя?
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (500/750/1000/1500).
Чем больше пар полюсов?
И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора. Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя.
Как определить число пар полюсов асинхронного двигателя?
Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин.
Какое количество полюсов должно быть у синхронного генератора имеющего частоту тока 50 Гц?
Ротор генератора, приводимого в движение водяной турбиной, делает 75 об/мин. Определить число полюсов генератора, если частота его тока 50 гц: Следовательно, генератор имеет 80 полюсов.
Как определить частоту вращения ротора двигателя?
Частота вращения ротора измеряется с помощью датчика Холла. Сигнал тока статора снимается с помощью токовых клещей Fluke i5s, установленных на одной из фаз асинхронного двигателя. Оцифровку преобразованного сигнала тока выполняет система сбора данных L-Card LTR-EU-2 с модулем АЦП LTR22.
Как зависит частота вращения магнитного поля статора асинхронного двигателя от числа пар полюсов?
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов. Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
Как изменить число пар полюсов?
Для того чтобы регулировать скорость вращения в статор должна быть уложена обмотка специальной конструкции, состоящая в каждой фазе из двух полуобмоток. Путем пересоединения этих полуобмоток можно получить разное число пар полюсов. Обмотки можно переключать с простой звезды на двойную звезду.
Как посчитать частоту вращения вала?
Определение частоты вращения вала электродвигателя nэд = n2 ∙ i, где i − передаточное отношение привода.
Как устроен Синхронный двигатель?
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе.
Как осуществляется пуск асинхронного двигателя с фазным ротором?
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис. 3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.