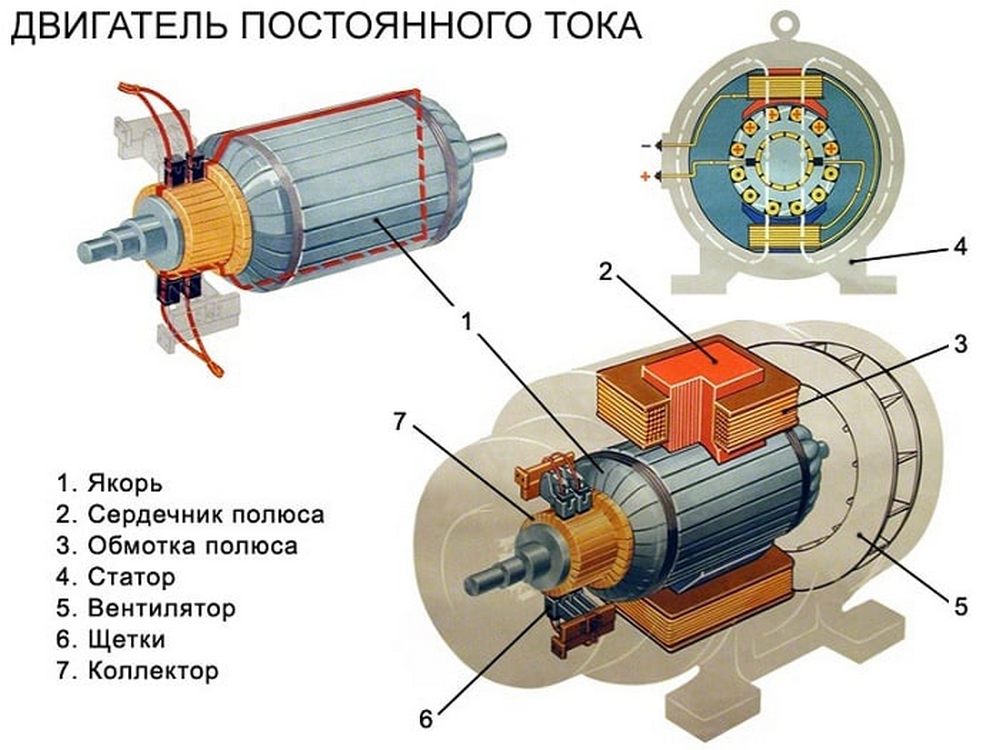
Двигатель постоянного тока П42/160 ,2 квт 70 х годов.
Снаружи корпуса торчат болты, которыми башмаки прикручены к статору. Подносите компас к ним. А вообще изначально вы зачем занялись этим двигателем? Какие с ним проблемы?
Этот двигатель стоит на координатно- расточном станке 2А450 1969г в приводе главного движения .
Управляется магнитным усилителем ПМУ-7.
Изначально была проблема-перестал держать обороты при увеличении нагрузки. После этого были заменены все селеновые выпрямители на диодные мосты.А также все регулировочные сопротивления. (5штук) Ввиду их дряхлости. После замены он поработал недолго-задымился двигатель. Там стоит движок тип П42/160С 2кВт.Его перемотали. Привезли обратно ,поставили.
Сейчас проблема такая-при включении все происходит нормально. Включается минимальная скорость и через выдержку времени вторая ступень. Минимальная примерно 500 об\мин.Нажимаю кнопку быстрее-включается реостат и начинает уменьшать ток возбуждения. Скорость оборотов растет.Ток якоря примерно 2 А.И постепенно увеличивается. Где-то после 650 оборотов резко растет ток и скорость падает. Слышен сильный гул.Замерял ток возбуждения. Он вначале при мин. оборотах- равен 0.7А и при увеличении скорости падает примерно до 0.1 А Примерно в это время и начинает резко возрастать ток и падать скорость. Проверил все обратные связи в МУ.Там есть положительная ОС по току и отрицательная по напряжению.Они в принципе работают. Напряжения на управляющей обмотке изменяются. Пробовал крутить регулировочные реостаты. Но они мало на что влияют.
В результате пришел к выводу что неправильно подключена одна из обмоток.
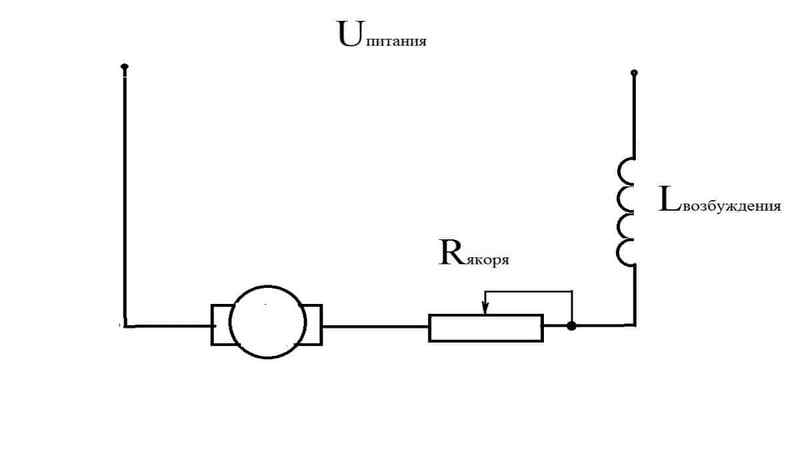
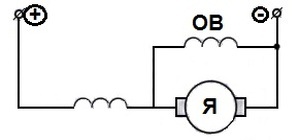
Вот нашел такую схемку.
Очень похоже на мой случай.Возможно перемотчики перепутали концы С1-С2 или Ш1-Ш2.Хочу как-то это проверить.
Они могли перепутать концы и у одной из половин обмотки, и у обоих. Если у обоих, можно попробовать просто поменять полярность и шунта, и якоря, и посмотреть на поведение. Ещё проверить затяжку болтов крепления башмаков. Если там будет слабина, при большом токе башмак может притянуться к якорю, и работать тормозом. На эту мысль наводит гул. Звука трения там нет?
Кстати, не мешает ещё посмотреть, нет ли искрения коллектора на большом токе. Оно может появиться при переполюсовке дополнительной обмотки. Она служит для сдвига угла коммутации, типа угла опережения в двигателях внутреннего сгорания. Сдвиг тогда в обратную сторону, и щётки начинают искрить при большой нагрузке.
пора менять профиль и копать траншеи .
У вас есть чем индуктивность измерить? Правильное включение должно иметь максимальную индуктивность.
Попробуйте подключить через лампу накаливния к сети при разных вариантах подключения обмотки.
Вариант с меньшим накалом укажет на макс. индуктивность.
Снова занимался двигателем ПС42/160.
Там на клеммник выведены концы-Ш1-Ш2 -возбуждение ,D1-C2 -якорные и перемычка C1-D2.
Я подал на якорь от отдельного моста 110В.Проверил регулировку возбуждения. Она регулируется от 180 до 70 В.Включил питание.Двигатель стал крутиться естественно медленней.Потом стал реостатом уменьшать возбуждение .Якорный ток и скорость начали расти. При уменьшении возбуждения примерно 90 В якорный ток резко пошел вверх.То есть тоже самое что и при использовании ПМУ.Делаю вывод-неисправность все-таки в движке.Звонили перемотчикам-они уверены что все сделано правильно. Кто из нас прав?

да -еще пробовал подать возбуждение наоборот. Тогда получается еще хуже-хотя и крутится в другую сторону-но зато сразу резко возрастает якорный ток.
Правы ВСЕ!. А если серьёзно, то фиг его знает. Если молодняк работает в перемотчиках, то вполне их косяк. Стандарты и правила меняются. Надо заиметь инструмент правильный для измерений. А так можно и до кулачных боёв дойти.
"еще пробовал подать возбуждение наоборот"
Надо было подключить и шунт, и якорь наоборот.
На щётки не посмотрели на большом токе? Коллектор чистый?
Коллектор чистый.Недавно после перемотки. А про одновременное подключение шунта и якоря не додумал.А что при этом поменяется?
Форум про радио — сайт, посвященный обсуждению электроники, компьютеров и смежных тем.
Электродвигатель постоянного тока: схема подключения, принцип работы
Главное помнить, что есть начало и конец катушек. Для этого существуют специальные формулы. У них в маркировке присутствует слова Start или Starting, но можно взять и обычные.

Изменение направления движения мотора Если после подключения мотор работает, но вал крутится не в том направлении, которое вам надо, можно поменять это направление. Однако нередко возникает необходимость подключения асинхронного двигателя в однофазную бытовую сеть с напряжением в вольт например в стиральных машинах. Пусковые конденсаторы. Как подобрать и подключить.

А двухфазные электромоторы нашли свое применение в однофазных сетях в виде конденсаторных двигателей. Пусковая обмотка подключается через пусковой конденсатор только для старта и после этого должна быть отключена вручную или автоматически.

Но как это сделать правильно? Он создает внутри вращающееся магнитное поле, которое действует на ротор, заставляя его вращаться.

Секундная стрелка вращается, делая один полный оборот в минуту. Такие электродвигатели применяются на производстве, так как трехфазное напряжение чаще всего используется именно там.

Но когда речь идет о двигателях, то здесь три фазы нужны для создания кругового магнитного поля и как результат, более высокого КПД. Его можно считать состоящим из двух круговых с одинаковой амплитудой, вращающихся навстречу друг другу.

Добиться этого можно включением в цепь ее питания фазосмещающего элемента. Реверс конденсаторного двигателя Важно!

Определение начала и конца обмоток трех фазного асинхронного двигателя, звезда ,треугольник
Схема подключения электродвигателя постоянного тока

Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Схемы подключения однофазных асинхронных двигателей
С пусковой обмоткой
Для подключения двигателя с пусковой обмоткой потребуется кнопка, у которой один из контактов после включения размыкается. Эти размыкающиеся контакты надо будет подключить к пусковой обмотке. В магазинах есть такая кнопка — это ПНВС. У нее средний контакт замыкается на время удержания, а два крайних остаются в замкнутом состоянии.
Какое освещение Вы предпочитаете
Сначала при помощи измерений определяем какая обмотка рабочая, какая — пусковая. Обычно вывод от мотора имеет три или четыре провода.
Рассмотрим вариант с тремя проводами. В этом случае две обмотки уже объединены, то есть один из проводов — общий. Берем тестер, измеряем сопротивление между всеми тремя парами. Рабочая имеет самое меньшее сопротивление, среднее значение — пусковая обмотка, а наибольшее — это общий выход (меряется сопротивление двух последовательно включенных обмоток).
Если выводов четыре, они звонятся попарно. Находите две пары. Та, в которой сопротивление меньше — рабочая, в которой больше — пусковая. После этого соединяем один провод от пусковой и рабочей обмотки, выводим общий провод. Итого остается три провода (как и в первом варианте):
С этими тремя проводами и работаем дальше — используем для подключения однофазного двигателя.
Конденсаторный
При подключении однофазного конденсаторного двигателя есть варианты: есть три схемы подключения и все с конденсаторами. Без них мотор гудит, но не запускается (если подключить его по схеме, описанной выше).
Схема с двумя конденсаторами
При реализации других схем — с одним конденсатором — понадобится обычная кнопка, автомат или тумблер. Там все соединяется просто.
Подбор конденсаторов
Есть довольно сложная формула, по которой можно высчитать требуемую емкость точно, но вполне можно обойтись рекомендациями, которые выведены на основании многих опытов:
Рабочее напряжение этих конденсаторов должно быть в 1,5 раза выше, чем напряжение сети, то есть, для сети 220 вольт берем емкости с рабочим напряжением 330 В и выше. А чтобы пуск проходил проще, для пусковой цепи ищите специальный конденсатор. У них в маркировке присутствует слова Start или Starting, но можно взять и обычные.
Изменение направления движения мотора
Если после подключения мотор работает, но вал крутится не в том направлении, которое вам надо, можно поменять это направление. Это делают поменяв обмотки вспомогательной обмотки. Когда собирали схему, один из проводов подали на кнопку, второй соединили с проводом от рабочей обмотки и вывели общий. Вот тут и надо перекинуть проводники.

Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.

Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.

Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»)
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.

Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
-
Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).

Трехфазный генератор переменного тока
Условные обозначения двигателей постоянного тока серии П.
П Х1 Х2 Х3 М П – машина постоянного тока; Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенный с самовентиляцией 1-6 габарит. Б – закрытое исполнение с естественным охлаждением 1-4 габарит; Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит; Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина; М – морское исполнение;
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611. Двигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором.
Условия эксплуатации электродвигателей постоянного тока П51, П52.
- Двигатели постоянного тока П51, П52 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры двигателей постоянного тока П51, П52, ПБ51, ПБ52

| Тип двигателей постоянного тока | Размеры, мм | Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631 | Масса, кг при IM1001, IM1004 | ||||||
| b10 | d1 | d20 | d30 | l10 | l30 | h | |||
| П51У4 | 264 | 35 | 255 | 352 | 225 | 606 | 180 | 122 | 115 |
| ПБ51У2 | 638 | 127 | 120 | ||||||
| П52У4 | 264 | 35 | 255 | 352 | 265 | 646 | 180 | 142 | 135 |
| ПБ52У2 | 678 | 147 | 140 |
Основные технические характеристики двигателей постоянного тока П51, П52
| Тип | Мощность, кВт | Напряжение В | Ток сети А | Частота вращения, об/мин | КПД % |
| П51М | 2,7 | 110 | 33 | 750/1500 | 71 |
| 2,7 | 220 | 17,2 | 750/1500 | 74 | |
| 4,2 | 110 | 52,2 | 1000/2000 | 73 | |
| 4,2 | 220 | 25,6 | 1000/2000 | 74,5 | |
| 7,4 | 110 | 83,6 | 1500/2250 | 79,5 | |
| 7,4 | 220 | 41,8 | 1500/2250 | 80 | |
| 14,5 | 110 | 153 | 3000/3300 | 85 | |
| 14,5 | 220 | 77,3 | 3000/3300 | 85 | |
| П52М | 3,4 | 220 | 20,8 | 750/1500 | 74,5 |
| 5 | 110 | 58,5 | 1000/2000 | 77 | |
| 5 | 220 | 29,2 | 1000/2000 | 77 | |
| 8,8 | 110 | 97,8 | 1500/2250 | 81,5 | |
| 8,8 | 220 | 48 | 1500/2250 | 82,5 | |
| 16 | 220 | 84,5 | 2800 | 86 | |
| 20 | 220 | 104 | 3000/3300 | 87 |
Электродвигатели постоянного тока серии П 1, 2, 3, 4 габаритовЭлектродвигатели постоянного тока серии П51, П52Электродвигатели постоянного тока серии П61, П62Двигатели постоянного тока серии 2П (2ПО132 — 2ПО200, 2ПФ132 — 2ПФ200)Электродвигатели постоянного тока 2ПН, 2ПБЭлектрические машины постоянного тока серии 4ПДвигатели постоянного тока ДП-112, ДК-112, ДКУ-112Двигатели МР на постоянных магнитах
Двигатели МТА на постоянных магнитахДвигатели PI, PC, 3PI на постоянных магнитахДвигатели MX, МВН, МВО на постоянных магнитахЭлектродвигатели постоянного тока серии ДЭлектродвигатели постоянного тока ДПМЭлектродвигатели постоянного тока ДПУРЭлектродвигатели постоянного тока ПБС, ПБСТЭлектродвигатели постоянного тока ДК-309М
Способы подключения
Ротор начнет догонять поле статора.

Вместо крышки вентилятора устанавливается вентилятор принудительного охлаждения см. Тепловое реле отключает обе фазы обмотки, если они нагреваются выше допустимого. Это происходит автоматически — без вмешательства пользователя.

На ней указывается модель, тип, схема подключения, напряжение, а также другие параметры. Чтобы включить трёхфазный электродвигатель, нужно одновременно подать напряжение на все 3 фазы.
Приходится применять изыски раскрутки. Если после этого двигатель окажется горячим, то: Возможно, подшипники загрязнились, зажались или просто износились. Три фазы подключаются к противоположным концам обмоток.

Поэтому однофазный электромотор не запустится сам по себе при подключении к сети. Применяются для регулируемых электроприводов с эксплуатационными показателями высокого качества, такими как готовность к перезагрузке и вращательная равномерность.
Принцип действия и схема запуска
По сути, у вас имеется в розетке ноль и фаза. Конденсаторный контакт следует присоединить к нулю, при этом другой — к следующему выходу двигателя. Тень, которую стрелка отбрасывает на стену, меняется как синус с периодом в 1 минуту, а тень, отбрасываемая на пол — как косинус. Подключение двигателя к сети производится через электромагнитный пускатель.
Их можно встретить в стиральных машинках, кофемолках, мясорубках, шуруповертах, обогревателях и прочих приборах. Правда, трехфазный двигатель проще? Вместо крышки вентилятора устанавливается вентилятор принудительного охлаждения см.
С включенным конденсатором на обмотке запуска. Например, если ток равен 1. Обычно у рабочей обмотки асинхронных двигателей сопротивление не более 13 Ом. Как подключить магнитный пускатель. Схема подключения.
Особенности подключения двигателя постоянного тока
Широко распространенные сейчас в быту и на производстве электродвигатели постоянного тока имеют много достоинств, но отличаются высокими пусковыми токами. Существует несколько распространенных вариантов подключения таких электромоторов.

Благодаря отличным тяговым возможностям электрических двигателей постоянного тока собранное на их основе электрооборудование получило широкое распространение, как в быту, так и на производстве. Такие моторы часто можно встретить в современных детских игрушках, вентиляторах, электроинструментах и автономных промышленных электроустановках. Они являются неотъемлемой частью систем управления и электрификации автомобилей. В качестве источника питания обычно используются батарейки или разноемкостные аккумуляторы.
Двигатель постоянного тока также имеет много других достоинств, среди которых:
- простая регулировка частоты вращения;
- возможность мягкого пуска и плавного увеличения оборотов;
- способность разгоняться до скорости свыше трех тысяч оборотов в минуту.
Несмотря на все эти преимущества, электромотор постоянного тока имеет более сложную конструкцию, чем асинхронный силовой агрегат переменного тока на 380 или 220 вольт, что подразумевает некоторые сложности в его эксплуатации. Кроме того, здесь есть опасность возникновения пусковых токов значительной величины, поэтому существуют разные способы подключения двигателей постоянного тока, каждый из которых имеет свои особенности и нюансы. Чтобы лучше их понять, рассмотрим более детально конструкцию, принцип работы и подключение двигателя постоянного тока.
Конструкционные особенности электромотора постоянного тока
Любой двигатель электрический состоит из двух основных деталей – статора (станины) и ротора (якоря). Как правило, у распространенных сейчас современных моторов на 12 или 22 вольта статор изнутри покрыт тонкими листами из электротехнической стали, изолированными между собой с помощью специального лака. Они образуют отдельные полюса и обмотки, заканчивающиеся расширениями в виде наконечников, которые способствуют равномерному распределению электромагнитной индукции в воздушной прослойке между статорной и роторной частью. В зависимости от конструкции и мощности электромотора, обмотка может состоять из многочисленных витков тонкого провода или же из меньшего числа витков более толстого провода.
В качестве ротора обычно используется установленный на валу цилиндр с зубчатой структурой. Он помещается внутрь статора, но располагается на некотором расстоянии от него. Ротор тоже производится из тонких стальных листов с изоляцией и вентиляционными зазорами между отдельными пакетами. Якорные пазы соединяются медными проводниками. Кроме того, обязательным условием для якоря электромотора постоянного тока П или ПЛ серии является наличие обмотки двухслойного типа.
Принцип работы двигателя постоянного тока
Функционирование всех современных электромоторов базируется на принципах электромагнитной индукции и так называемом «правиле правой руки», когда ротор начинает вращаться при пропускании разнонаправленного тока вверху и внизу роторной обмотки. Согласно данному правилу, уложенные в якорные пазы проводники выталкиваются из генерируемого статором магнитного поля, тем самым придавая ускорение ротору эл двигателя.
Получается, что верхняя часть обмотки ротора начинает выталкиваться в левую сторону, а нижняя часть – в правую. Эта энергия передается непосредственно валу электромотора, вокруг которого закреплена обмотка, и тот совершает вращательное движение. Однако вращение прекращается, когда ротор проворачивается, и якорные части меняются местами. Для поддержки оборотов в электрическом двигателе постоянного тока П используется коллектор, с помощью которого производится коммутация роторной обмотки.
Теперь рассмотрим наиболее распространенные способы подключения двигателя постоянного тока. Обратите внимание, что оптимальная схема подключения к сети или аккумулятору должна соответствовать мощности силового агрегата. Различают устройства малой, средней и большой мощности.
Прямой пуск электромотора
Маломощный электрический мотор (до одного киловатта) проще всего включить напрямую. Как и подключение трехфазного двигателя 380В, такой запуск электромотора постоянного тока П предусматривает подачу напряжения от источника питания непосредственно на рабочую обмотку. Поскольку отсутствует естественная компенсация за счет противодействующей электродвижущей силы, пусковой ток достигает максимального значения.
Если рассматривать прямое включение с точки зрения физики, то ситуация выглядит следующим образом. Изначально при старте мотора сила тока имеет значение, определяемое по формуле: І=U/R, где U – номинальное напряжение, R – сопротивление катушек. При этом токовая нагрузка достигает максимальной величины и может более чем в два раза превышать номинал.
Дальнейшее протекание тока инициирует возникновение электродвижущей силы противодействия, которая выступает в роли своеобразного тормоза, нормализующего стартовую нагрузку до номинальной мощности. Расчет силы тока теперь выполняется по другой формуле: І=U-Е/R, где Е – ЭДС противодействия.
В мощных силовых агрегатах, например, крановых двигателях ДК213МД2 сопротивление роторных обмоток может достигать одного Ома, что провоцирует возникновение пускового тока до 500 ампер, что в десятки раз превышает допустимое значение. Это может вызвать термическое опускание металла, оплавление и деформацию проводов, порчу контактных щеток и колец, а также создает повышенную опасность поражения электрическим током обслуживающего персонала. Поэтому для включения электромоторов средней (например, серии Д) и большой мощности рекомендуется использовать реостаты, специальные регуляторы или заведомо низкое напряжение. Прямой пуск для них противопоказан.
Подключение через микросхему Arduino
Двигатели малой мощности также можно запускать с помощью специальных функциональных платформ. Таким распространенным сейчас способом является подключения моторчика постоянного тока к Ардуино. Напрямую через Arduino подключение лучше не делать, поскольку велика вероятность повредить микросхему. Рекомендуется использовать Н-мост или транзисторы. Такая технология внедрения электромоторов в функциональные контуры предоставляет много возможностей для управления и приведения в движение рабочих частей электромашин, современных транспортных средств и роботизированных механизмов. Можно контролировать не только скорость оборотов моторчика, но и направление его движения.
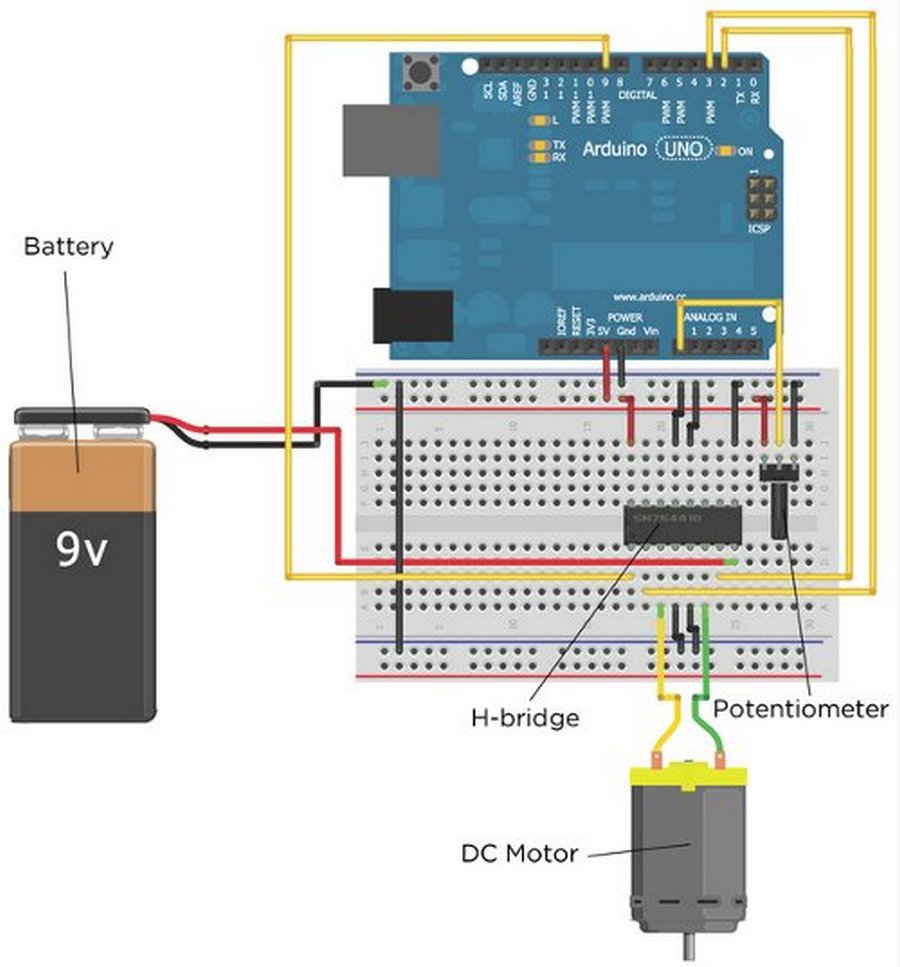
Прямое подсоединение к выходным портам платформы может не только вызвать их перегорание, но также сведет функциональные возможности управления электромотором к минимуму. Через каждый такой порт может подаваться ток величиной около двадцати миллиампер, а для нормальной работы даже самого компактного электрического моторчика требуется во много раз больше. Поэтому мотор нужно подключить к Ардуино последовательно через регулятор силы подаваемого тока.
Выбирая подходящий двигатель для подключения к микроконтроллеру, следует обратить внимание на следующие характеристики:
- потребляемый ток, необходимый для нормального функционирования оборудования;
- напряжение номинальное (наиболее распространенное для таких систем – 12 вольт);
- вращательный момент – чем он больше, тем мощнее агрегат;
- скорость оборотов вала электромотора;
- вес и габариты – предпочтение сейчас отдается миниатюрным моделям.
Легче всего осуществляется последовательное подключение к Ардуино стандартного щеточного электромотора постоянного тока, рассчитанного на силу тока до 5A и рабочее напряжение около 9B. Для этого часто используют транзисторную систему. Но она позволяет только контролировать скорость оборотов. Подключение к микроконтроллеру через H-мост дает возможность также регулировать и направление вращения.
Включение через пусковой реостат
Такая схема подключения предусматривает наличие в пусковой цепи электромотора дополнительного устройства, создающего переменное сопротивление. Есть несколько способов, как подключить его и какое именно устройство использовать. Но цель здесь одна – обеспечить снижение токовой нагрузки на старте до достижения валом оптимальной скорости вращения. В процессе стабилизации силы тока сопротивление реостата должно меняться от максимума до минимума. Расчет производится по формуле: І=U/R+R(реостата).
Многим наверняка известны еще со школьных занятий по физике подобные опыты, когда сопротивление менялось вручную путем перемещения ползунка реостата. Однако на производстве такой способ малоэффективен и плохо согласовывается с токовыми величинами, поэтому применяется редко. Чаще используется вариант подключения с регулировкой по току или по электродвижущей силе в обмотках возбуждения. Также распространен монтаж к реле времени, где независимое управление отдельными ступенями осуществляется посредством временной выдержки.
Отличительной особенностью силовых агрегатов переменного тока (в отличие от рассчитанных на переменку 3ф или напряжение тока 220 вольт) – это наличие обмоток возбуждения. Перечисленные выше способы подключения применимы для электромоторов всех типов возбуждения:
- независимого;
- параллельного;
- последовательного;
- смешанного.
Но здесь есть некоторые нюансы. Моторы независимого возбуждения нельзя запускать на холостом ходу или при малых нагрузках, иначе агрегат будет поврежден от резко возросшей скорости вращения. При параллельном подсоединении через обмотку возбуждения проходит намного меньший ток, чем через роторную часть, поэтому мотор имеет жесткие характеристики, полезные для станков или вентиляторов. Если соединить ротор и обмотку возбуждения последовательно, то по ним будет протекать ток одинаковой величины. Такой силовой агрегат, распространенный в современном электротранспорте, имеет хорошие пусковые свойства, но тоже боится запуска на холостом ходу.
Как подключить электродвигатель постоянного тока пб 42м
Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Войти
Уже есть аккаунт? Войти в систему.
Последние посетители 0 пользователей онлайн
Ни одного зарегистрированного пользователя не просматривает данную страницу
- Уже зарегистрированы? Войти
- Регистрация
Главная
Активность
- Создать.
Важная информация
Мы разместили cookie-файлы на ваше устройство, чтобы помочь сделать этот сайт лучше. Вы можете изменить свои настройки cookie-файлов, или продолжить без изменения настроек.
Электродвигатель постоянного тока: схема подключения, принцип работы
 Статьи
Статьи
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.

Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.

Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.

Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Как подключать двигатели постоянного тока
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах , заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности , которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; |
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
| — сложность в изготовлении и высокая стоимость; |
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); |
| — якоря (ротора); |
| — коллектора; |
| — токосъемных щеток; |
| — конструктивных элементов. |
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.

Рисунок 1 – Конструкция двигателя постоянного тока
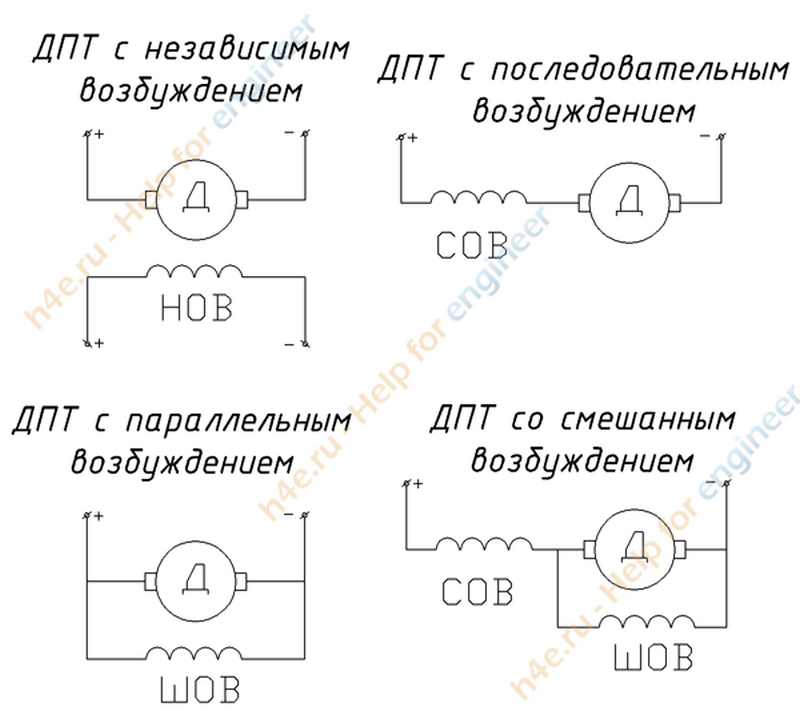
Двигатели постоянного тока классифицируют по магнитной системе статора:
2) ДПТ с электромагнитами :
| — ДПТ с независимым возбуждением; |
| — ДПТ с последовательным возбуждением; |
| — ДПТ с параллельным возбуждением; |
| — ДПТ со смешанным возбуждением. |

Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
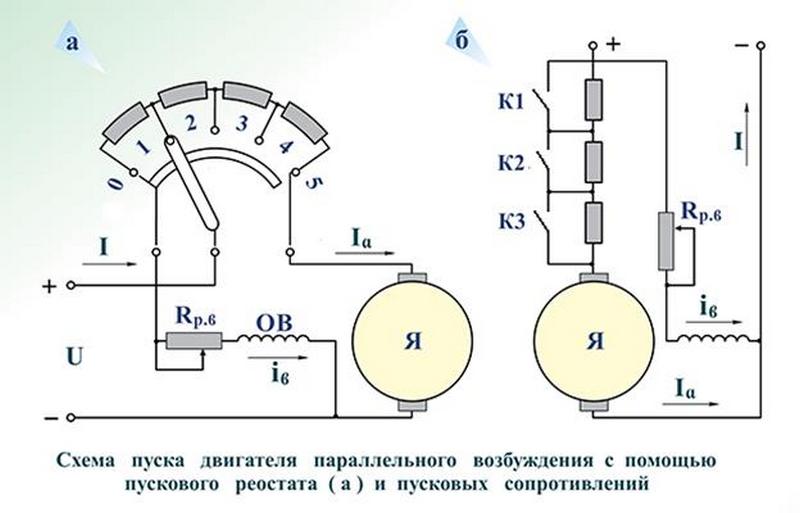
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; |
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |

Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
Частота вращения двигателя постоянного тока выражается формулой:
 |
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; |
| Iя – ток в якорной обмотке; |
| Rя – сопротивление якорной цепи; |
| k – конструктивный коэффициент двигателя; |
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
 |
Подставив в формулу электромеханической характеристики, получим:
 |
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
Подключение электродвигателя постоянного тока
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Какие существуют схемы подключения электродвигателей постоянного тока
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
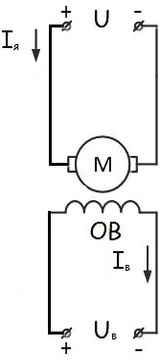
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
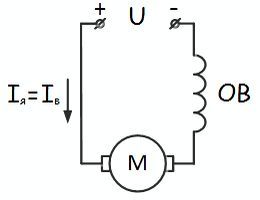
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
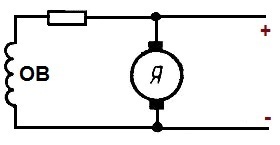
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).