Arduino.ru
Эта библиотека функций для Arduino контроллера предоставляет набор функций для управления сервоприводами. Стандартные сервоприводы позволяют поворачивать привод на опредленный угол от 0 до 180 градусов обычно. Некоторые сервоприводы позволяют совершать полные обороты на заданной скорости.
Библиотека Servo позволяет одновременно управлять 12-ю сервоприводами на большинстве плат Arduino и 48-ю на Arduino Mega. На контроллерах отличных от Mega использование библиотеки отключает возможность использовать выходы 9 и 10 в режиме ШИМ даже если привод не подключен к этим выводам. На плате Mega могут быть использованы до 12 сервоприводов без потери функционала ШИМ. При использовании Mega для управления от 12 до 23 сервоприводов нельзя будет использовать выходы 11 и 12 для ШИМ.
Подключение
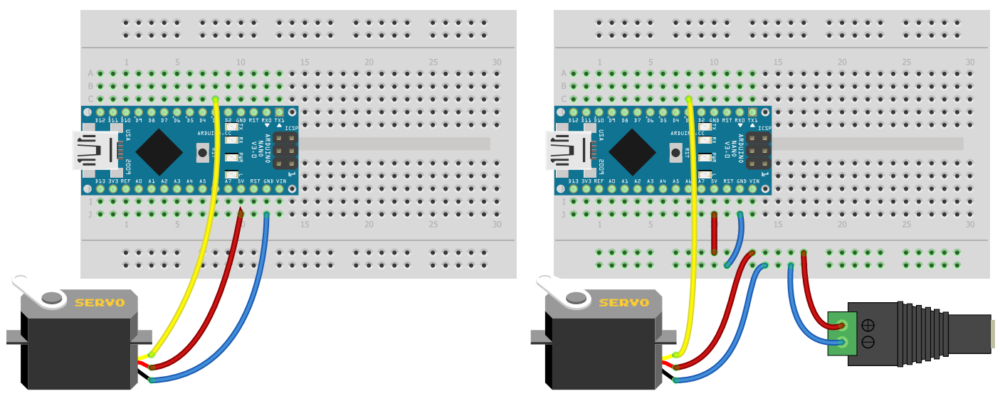
В общем случае сервопривод подключается 3-мя проводами : питание, земля и сигнальный. Обычно питание — красный провод и может быть подключен к выводу +5V на плате Arduino. Черный провод земля подключается к GND выводу Arduino, сигнальный, обычно желты, провод подключается к цифровому выводу котроллера Arduino. Следует отметить, что мощные сервоприводы могут создавать большую нагрузку, в этом случает он должен быть запитан отдельно (не через выход +5V Arduino). Тоже самое верно для случая подключения сразу нескольких сервоприводов. Убедитесь, что привод и контроллер подключены к общей земле.
Arduino и сервопривод
Сервопривод, он же сервомашинка, он же просто серво – простейший “модельный” актуатор, использовался в радиоуправляемых моделях ещё до появления Ардуино. Сервопривод поворачивает свой выходной вал в диапазоне
180 градусов и обладает вполне приличным моментом для перемещения частей механизмов. В маленьком корпусе располагаются:
- Коллекторный моторчик
- Редуктор (пластиковый или металлический)
- Потенциометр обратной связи
- Контроллер (драйвер мотора, обратная связь, управление по интерфейсу PWM)
Серво комплектуется набором “качалок” и винтами для крепления
Характеристики 9-граммового сервопривода:
- Напряжение питания: 3.. 7.2V
- Крутящий момент:
- 1.2кг/см при 4.8V
- 1.6кг/см при 6.0V
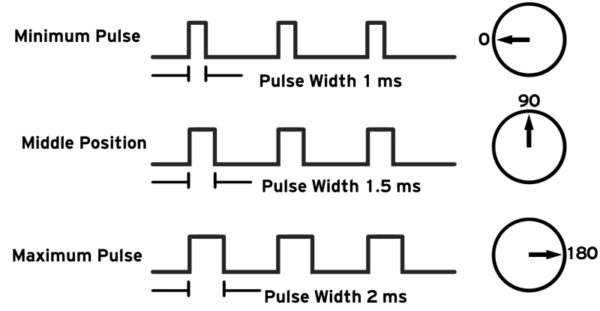
Сервопривод управляется ШИМ сигналом, точнее длиной импульса: минимальная (0 градусов) и максимальная (
180 градусов) длина импульса колеблется в зависимости от модели и производителя сервопривода.
Подключение
- Коричневый: GND
- Красный: VCC
- Жёлтый: цифровой пин
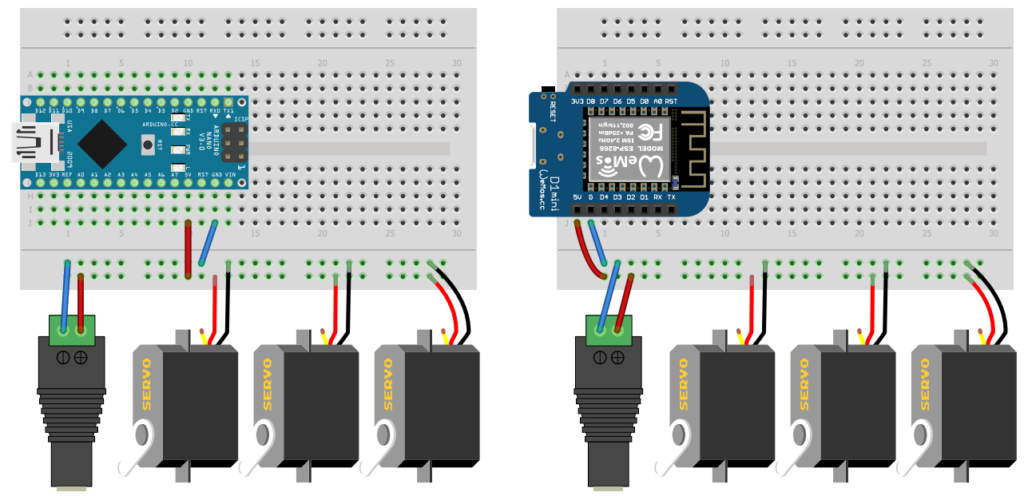
Примечание: сервопривод потребляет довольно приличный ток (стартовый до 1А), поэтому рекомендуется питать его от внешнего источника. При питании от компьютера напряжение может просесть и МК перезагрузится, при высокой нагрузке (с 2 и больше приводов) может выгореть защитный диод на плате Arduino!
Библиотеки
Для управления сервоприводом можно использовать стандартную библиотеку Servo. Эта библиотека отбирает у микроконтроллера первый таймер, поэтому в некоторых случаях будет удобно использовать библиотеку SoftServo. Стандартная библиотека управляет сервоприводом очень резко, на максимальной скорости, поэтому для реальных применений лучше использовать библиотеку плавного движения серво – ServoSmooth.
Servo.h
Библиотека стандартная и идёт в комплекте с Arduino IDE. Подключаем и создаём объект сервопривода. При создании никакие аргументы не передаются:
Библиотека имеет следующие методы:
При “подключении” серво через attach(pin) диапазон длины импульса устанавливается стандартный: 544.. 2400 мкс (задан в библиотеке). Если есть желание настроить серво идеально, чтобы она работала на весь диапазон – нужно попробовать покрутить её через writeMicroseconds() в крайних значениях диапазона и найти минимум и максимум, при которых серво “упирается”.
Servo
Allows Arduino boards to control a variety of servo motors.
This library can control a great number of servos. It makes careful use of timers: the library can control 12 servos using only 1 timer. On the Arduino Due you can control up to 60 servos.Compatibility
This library is compatible with the avr, megaavr, sam, samd, nrf52, stm32f4, mbed, mbed_nano, mbed_portenta, mbed_rp2040, renesas, renesas_portenta, renesas_uno architectures so you should be able to use it on the following Arduino boards:
Compatibility Note
Note: while the library is supposed to compile correctly on these architectures, it might require specific hardware features that may be available only on some boards.
Releases
To use this library, open the Library Manager in the Arduino IDE and install it from there.
- 1.2.1 (latest)
- 1.2.0
- 1.1.8
- 1.1.7
- 1.1.6
- 1.1.5
- 1.1.4
- 1.1.3
- 1.1.2
- 1.1.1
- 1.1.0
- 1.0.3
- 1.0.2
- 1.0.1
- 1.0.0
Usage
This library allows an Arduino board to control RC (hobby) servo motors. Servos have integrated gears and a shaft that can be precisely controlled. Standard servos allow the shaft to be positioned at various angles, usually between 0 and 180 degrees. Continuous rotation servos allow the rotation of the shaft to be set to various speeds.
The Servo library supports up to 12 motors on most Arduino boards and 48 on the Arduino Mega. On boards other than the Mega, use of the library disables analogWrite() (PWM) functionality on pins 9 and 10, whether or not there is a Servo on those pins. On the Mega, up to 12 servos can be used without interfering with PWM functionality; use of 12 to 23 motors will disable PWM on pins 11 and 12.
Arduino библиотека Servo
Arduino библиотека Servo представляет собой набор функций для управления сервоприводами. Данная библиотека дает возможность управлять сразу двенадцатью сервоприводами с помощью большинства микроконтроллеров Ардуино. Некоторые платы Ардуино позволяют подключать меньше сервоприводов (такие платы как Arduino LilyPad) так как у их меньше цифровых вводов/выводов. Другие платы дают возможность управлять сразу 48-ю сервоприводами (Arduino Mega).
Использование библиотеки Servo накладывает некоторые ограничения. На всех платах кроме Arduino Mega, при работе с данной библиотекой, пропадает возможность использовать цифровые пины 9 и 10 в режиме ШИМ. На плате Ардуино Мега режим ШИМ становится не доступен на пинах 11 и 12, только при подключении более 12 сервоприводов.
Скачать библиотеку Servo.h
Данная библиотека автоматически устанавливается вместе с Arduino IDE. Но вы можете отдельно скачать библиотеку Servo для Ардуино. Для установки библиотеки просто распакуйте zip архив в папку «C:\Program Files (x86)\Arduino\libraries» или в то место, где у васт установлена среда разработки Arduin IDE. Если у вас запущена программа Arduino IDE, то для работы с новой библиотекой её необходимо перезапустить.
После того как вы скачали библиотеку Servo и установили ее, вы можете подключать библиотеку в свои скетчи и вам будут доступны примеры использования данной библиотеки.
Для использование библиотеки Servo необходимо подключить ее в свой скетч и создать переменную типа servo. Сделать это очень просто:
attach()
Указывает вывод к которому подключен сервопривод.
Синтаксис
Параметры
pin — Обязательный параметр. Цифровой пин к которому подключен сигнальный провод сервопривода.
min — Необязательный параметр. Ширина импульса в микросекундах, соответствующая минимальному (угол 0 градусов) положению сервопривода. (по умолчанию 544)
max — Необязательный параметр. Ширина импульса в микросекундах, соответствующая максимальному (угол 180 градусов) положению сервопривода.
Возвращаемые значения
write()
Поворачивает сервопривод на заданный угол. Для сервоприводов постоянного вращения устанавливает скорость и направление вращения.
Синтаксис
Параметры
angle — Обязательный параметр. Устанавливает угол от 0 до 180 градусов. При использовании сервопривода постоянного вращения значение 90 используется для неподвижного состояния. Значение 0 для максимальной скорости кручения в одну сторону, а 180 для максимальной скорости кручения в другую сторону.
Возвращаемые значения
writeMicroseconds()
Поворачивает сервопривод на угол заданный в микросекундах. С сервоприводами постоянного вращения работает по таком же принципу как и функция write().
Синтаксис
Параметры
ms — Обязательный параметр. Значение в микросекундах
Возвращаемые значения
Возвращает текущее положение сервопривода.
Синтаксис
Параметры
Возвращаемые значения
Int от 0 до 180.
attached()
Проверяет, указан ли управляющий пин для экземпляра класса Servo.
Синтаксис
Параметры
Возвращаемые значения
boolean true — если пин был указан и false — если нет
detach()
Отсоединяет экземпляр класса от пина. При отсоединения всех сервоприводов, заблокированные ШИМ выводу снова станут доступны.
Синтаксис
Параметры
Возвращаемые значения
Железо
Это расширенный стартовый набор. В комплект входит Arduino Mega R3, макетные платы, множество датчиков, управляемые механизмы и необходимые радиоэлектронные компоненты. Полный список.

Arduino Uno — плата на базе микроконтроллера ATmega328P с частотой 16 МГц. На плате есть все необходимое для удобной и быстрой работы.