Что такое датчики Холла, и для чего они нужны в электровелосипедах
Датчик Холла представляет собой датчик магнитного поля. Свое название он получил благодаря принципу своей работы – эффекту Холла.
В 1879 году Эффект Холла был открыт Эдвином Холлом в тонких пластинах золота. Эффект заключается в формировании поперечной разности потенциалов в проводнике с током, помещенным в магнитное поле. Изобретение было впервые использовано в лабораториях для изготовления датчиков измерения тока или интенсивности магнитных полей, поскольку приборы для измерения этих параметров были очень дорогими и довольно габаритными. Однако практичное применение
данный эффект нашел только недавно, когда уже стали доступными полупроводниковые технологии, которые позволяли создавать недорогие твердотельные датчики. Датчики Холла используются в системах, где возможна трансформация контролируемой величины в изменение магнитного поля, которое можно проверить датчиком Холла. К этим величинам можно отнести переменный/постоянный ток, давление, напряжение, вибрация скорость и т.д. Эффект Холла подходит для построения датчиков положения, которые применяются в транспорте, включительно и электрическом.
В большинстве случаев датчики Холла представляют собой небольшой прибор с тремя выводами: одним аналоговым или цифровым выводом и двумя выводами питания.
Поскольку выходной сигнал датчиков Холла пропорционнален индукции магнитного поля, а не скорости его изменения, это создает их серьезное преимущество сравнительно с аналогичными по своему назначению индуктивными датчиками.

В зависимости от вида передаточной функции датчики Холла бывают линейными (аналоговыми) и цифровыми. Аналоговые датчики преобразуют индукцию магнитного поля в напряжении, знак и величина которого зависят от полярности и силы поля. Цифровые датчики работают как управляемые магнитным полем коммутаторы, которые активизируют свой выход при одном его уровне и отключают при другом.
По реакциям на магнитное поле датчики Холла разделяются на биполярные, однополярные и униполярные. Биполярные датчики Холла, какими являются и датчики SS41, применяемые в велосипедных мотор-колесах, реагируют на смену знака магнитного поля, активизируясь при положительном знаке и отключаясь при отрицательном. Униполярные датчики измеряют поля только одной полярности, как правило положительной, а однополярные датчики – любой полярности.
Датчики могут отличатся между собой за техникой выходного каскада. Она может быть однотактной, когда выходной ток протекает только в одном направлении), двухтактной – выходной ток может протекать в любом из направлений.
Магнитное поле формируется постоянными магнитами или же электромагнитами, при этом изменение напряженности поля достигается благодаря перемещению магнита, изменения тока электромагнита, внесения магнитного материала между датчиком и магнитом.
Основными преимуществами датчиков является их быстродействие (до 100 кГц) и отсутствие механических движущихся частей. Датчики Холла используются там, где необходимы высокая точность данных. Они очень надежны и довольно долговечны. Для точного повторения параметров датчиков одной серии в процессе производства используется лазерная копирование элементов схем, что позволяет получать идентичные параметры при каждом последующем выпуске партии датчиков и, соответственно, производить их замену в случае выхода из строя без последующих подстроек.
Датчики Холла идеальны для построения импульсных датчиков скорости и дискретных датчиков положения в устройствах промышленного или же бытового назначении. Датчики Холла получили широкое распространение также и в электродвигателях. В электрических велосипедах датчики Холла исполняют функцию контроля частоты вращения мотор-колеса, отслеживания положения ротора, контроля напряжения электрического тока, а также используются в качестве фиксаторов угла поворота движущейся части ручки акселератора. Магнитная система обеспечивает изменение выходного напряжения.
В ручку акселератора электрического велосипеда встроен один датчик Холла SS49Е, а в мотор-колесе используются три цифровых (пороговых) датчика одного типа — SS41.
SS41 – цифровой биполярный датчик положения с логическим выходом. SS49Е – линейный датчик магнитного пола (датчик положения). Датчики серии SS41 и SS49Е выполнены с использованием миниатюрных корпусов размером всего лишь 4х3х1,5 мм.
Датчик SS49Е имеет параметричный линейный выход. Линейный датчик SS49Е характеризуется высокой нагрузочной способностью, линейной характеристикой преобразования в рабочем диапазоне магнитных полей, довольно широким диапазоном рабочих температур и питающих напряжений, долговременной стабильностью параметров и малым током потребления. Его подключение очень простое – подал питание, снял сигнал. Питание датчикам серии SS41 и SS49Е необходимо биполярное, тогда на южный полюс магнита датчики будет реагировать положительным уровнем на выходе, на северный полюс – отрицательным, на отсутствие поля – нулевым.
Питание датчики SS41 и SS49Е принимают в довольно широком диапазоне. Для SS41 характерны показатели от 4,5 до 24 V , а для SS49Е – от 2,7 до 6,5V.
Три датчика SS41, которые закрепляются в пазах статора двигателя и выступают в роли датчика положения ротора (ДПР), обеспечивая доступ данной цифровой информации к контроллеру. Воспринимая информацию от датчиков Холла о положении ротора, контроллер подает импульсы напряжения на обмотки статора, тем самым обеспечивая его вращение. При повороте ручки акселератора датчик Холла формирует управляющий сигнал для контроллера, на основании которого в последующем обеспечивается движение мотор-колеса с определенной частотой.
Датчики в мотор-клесах последовательно и четко срабатывают – как только один выключается, включается другой. Между сменой полярности на одном датчике, ровно 1/6 периода до переключения другого.
Датчики SS41, SS49Е имеют защиту от неправильного подключения.
К сожалению, датчики Холла могут выходить из строя в случае резких перепадов электрического напряжения, механических повреждений, перегрева электродвигателя, попадание воды внутрь ручки акселератора или мотор колеса, вследствие нарушения герметичности их корпуса. Выход из строя датчиков Холла — одна из главных причин возможной поломки мотор-колеса или ручки газа. Определить вышли ли из строя датчики Холла можно воспользовавшись вольтметром.
Как правило, при выходе из строя даже одного из трех датчиков мотор-колесо перестает вращаться при включении электропитания, и просто подергивается на месте. Для устранения поломки неисправный датчик нужно заменить.
Как проверить датчики Холла в мотор-колесе?
Датчики Холла – это маленькие электронные устройства, реагирующие на магнитное поле. Именно по ним синхронный двигатель узнает, в каком положении в данный момент времени пребывает ротор, и подает напряжение на определенные фазы. Вот зачем нужны датчики Холла в мотор-колесе – они отвечают за правильное чередование фаз и обеспечивают вращение мотора. Эффект Холла используется при создании датчиков положения, устанавливаемых в редукторных и прямоприводных мотор-колесах электровелосипедов и других видов транспорта.
Кроме мотор-колес, такие элементы (но только другого типа) устанавливаются в ручках газа. Они создают управляющий сигнал для контроллера. Принцип их работы заключается в создании в проводнике с током, находящемся в магнитном поле, поперечной разности потенциалов. Внешне такие датчики представляют собой компактные устройства с 3 выводами – аналоговым или цифровым и 2 выводами питания. От индуктивных датчиков они выгодно отличаются пропорциональностью выходного сигнала магнитному полю, а не скорости его изменения.
Причины и диагностика поломки датчиков положения
Причиной поломки датчиков Холла могут стать:
- значительный перегрев электромотора – выше 150–180 °С;
- механические повреждения;
- скачки напряжения;
- попадание воды внутрь корпуса электродвигателя или ручки газа.
Явным признаком поломки датчиков Холла считается подергивание МК при старте во время поворота ручки газа. Для диагностики такой неисправности достаточно вольтметра. Также для проверки работоспособности мотор-колеса, контроллера или ручки газа удобно воспользоваться диагностирующим тестером. Он позволяет продиагностировать датчики положения и обмотки, выявить имеющиеся дефекты, проверить фазовый угол и корректность переключения фаз.
Мониторинг работы ручки газа
На ручку газа от контроллера идет 3 провода:
- «ноль» – черный;
- питание 5 В – красный;
- управляющий сигнал, подающийся с ручки газа на контроллер (напряжение меняется в диапазоне 0–4,2 В, в зависимости от угла поворота ручки) – зеленый.
Для проверки работоспособности датчиков Холла в ручке акселератора необходимо измерить вольтметром напряжение на красном проводе. К нему нужно подключить «+» клемму прибора, а к черному проводу – минусовую. Если в исследуемой цепи нет напряжения 5 В, причина неполадок кроется не в ручке газа. Возможно, неисправен контроллер, или на него не поступает питание, или произошел обрыв проводки, идущей от контроллера к ручке акселератора.

Если же вольтметр показывает подачу напряжения на ручку акселератора, но при ее плавном повороте напряжение на зеленом проводе отсутствует, причина неполадок кроется в неисправности, как минимум, одного из датчиков Холла или подходящих к нему проводов. Неисправные элементы подлежат замене.
Проверка датчиков Холла в мотор-колесе
Перед ремонтом мотор-колеса нужно при помощи тестера или вольтметра проверить состояние датчиков Холла. Алгоритм действий таков: подключить тестер или подать напряжение +5 В и, вращая ось мотора, понаблюдать за изменением напряжения на сигнальной ноге. Проще поддаются ремонту моторы с винтами в боковой крышке. Если же крышка имеет резьбу, открутить ее сложнее – понадобятся специальные съемники.
Если при разборке мотора окажется, что обмотки потемнели (сгорели), восстановлению он не подлежит. Если же с обмотками все в порядке, обратите внимание на провода, идущие через ось к 3 миниатюрным датчикам. Обычно они посажены на силиконовый клей в нише, совпадающей по форме с геометрий корпуса датчика.
Замена датчиков Холла
Суть ремонта сводится к замене неисправных датчиков и восстановлению провода (при необходимости). Неисправные датчики нужно заменить – извлечь из паза в статоре, удалить остатки электронного устройства и следы клея, зачистить место монтажа и установить новые элементы. Контакты нужно припаять и изолировать. Для фиксации новых датчиков можно воспользоваться эпоксидной смолой или подходящим клеем. После ремонтных работ остается проверить исправность МК.
На видео наглядно демонстрируется, как работает мотор-колесо с неисправным датчиком Холла, поясняется, как выявить нерабочий датчик и правильно заменить его.
Зачем нужен датчик Холла в электросамокате
С развитием электроники и мощных емкостных аккумуляторов самокаты и велосипеды стали оснащаться электродвигателями.

За их работу отвечает умная электроника. Статья даст подробное описание, что такое датчик Холла в электровелосипеде и электросамокате. Будет описано назначение этих устройств, принцип работы и способы устранения неисправностей.

Эффект Холла
Прежде чем разобраться, для чего нужны датчики Холла в самокате, необходимо понимать, на каком эффекте основана его работа. Такой эффект был открыт Эдвином Холлом и получил свое название в честь его первооткрывателя. Именно он провел эксперимент с воздействием магнитного поля на электрический проводник. Суть эксперимента в следующем:
- Две грани золотой пластины были подключены к электрическому току.
- Пластину поместили между полюсами магнитов.
- При воздействии магнитного поля, на 2 других гранях золотой пластины появился слабый электрический ток.

Данный опыт показал, что под воздействием магнитного поля формируется слабая, но постоянная разница потенциалов на поверхности проводника.
Современный элемент Холла отлично подходит для контроля положений вращающихся частей электродвигателя. Нашел он свое применение и в конструкции различных электросамокатов и электровелосипедов.

Электросамокат
Помимо электросамоката, принцип Холла используются в двигателе и ручке газа электровелосипеда. Оба этих транспортных средства конструктивно схожи: имеют синхронный трехфазный электродвигатель, блок контроля и ручку газа.
Ручка газа
В ручке газа электросамоката установлен элемент холла модели «SS49Е».

Работает система по следующему принципу:
- Ручка оснащена постоянным магнитом. Магнит имеет равноименные полюса.
- Внутри ручки, между постоянным магнитом закреплен аналоговый биполярный датчик Холла.
- При проворачивании ручки, датчик смещается относительно магнитного поля, а значит меняется частота и напряжение электрического поля. Эти данные передаются на блок управления, который на основе выходного напряжения увеличивает или снижает количество оборотов электромотора устройства.

Датчик Холла в ручке газа достаточно надежен. Он представляет собой биполярный элемент с тремя выходами:
- Контакт «1» — «+».
- Контакт «2» — «-».
- Контакт «3» — «выход».
Датчик срабатывает только при воздействии магнитного поля. Проверить его работоспособность можно следующим образом:
- На контакт «+» подать напряжение 5 вольт.
- Подключить красный щуп вольтметра к контакту «выход».
- Черный щуп вольтметра подключить к контакту «-».
- Подвести магнит к датчику.

Исправный элемент должен сработать при воздействии постоянного магнита и показать на выходе напряжение 5 вольт.
Двигатель
Электромотор электрического самоката также оснащен контроллерами Холла. Они установлены в колесе самоката. Всего их три. Электрические велосипеды и самокаты оснащаются датчиками «SS41» или их точными аналогами.

Работают элементы следующим образом:
- В колесо установлен электрический трехфазный двигатель синхронного типа.
- На поверхности статора установлена печатная плата с вмонтированными датчиками Холла.
- Каждый датчик отвечает за одну фазу двигателя.
- При подаче напряжения на обмотки двигателя, создается ЭДС при взаимодействии с постоянным магнитом.
- Колесо начинает вращаться.
- Для удерживания постоянных оборотов, контроллер посылает сигналы определенной частоты именно в момент прохождения ротора через магнитное поле.
- Положение ротора в момент оборота определяется датчиками Холла.
- Каждая обмотка в момент воздействия ротора, становится электрическим магнитом и открывает прохождение тока через датчик Холла.
- Этот сигнал поступает на контроллер, и процесс повторяется.

Работа и вращение колеса осуществляется по правильной комбинации. Всего их 6. Происходит это так:
- Контроллер подает «+» на одну фазу двигателя.
- Минус подается на фазу «2».
- Третья фаза остается без напряжения.
- Вращение создает чередование подачи напряжения. Теперь на фазу «-» поступает «+», а на пустую фазу подается «-».
Именно за эту последовательность чередований и отвечает каждый датчик Холла, открываясь в момент появления магнитного поля на определенной фазе.
Датчики очень чувствительны к воздействию влаги, нагрузки и повышению температуры. В мотор-колесе, могут выйти из строя сразу все элементы или один из трех. Проверить датчики на работоспособность можно ранее описанным способом.
Дополнительное оборудование
По причине высокой скорости, электрические самокаты и велосипеды оснащаются дополнительным элементом Холла. Этот датчик отвечает за контроль скорости вращения колеса. Работает устройство по принципу считывания количества сигналов, поступающих от колеса самоката. Чем больше таких сигналов, тем выше скорость поступления импульсов от контроллера на колесо. Таким образом сохраняется интенсивность поступления сигналов, сохраняется скорость вращения.
Электрические велосипеды оснащаются дополнительной системой «PAS».

Система позволяет взаимодействовать педалям велосипеда с его электродвигателем. Работает механизм следующим образом:
- Датчик Холла цифрового типа устанавливается на «каретку» велосипеда.
- Ось этой «каретки» оснащена постоянными магнитами.
- Вращая педали, владелец приводит в движение постоянные магниты.
- Магниты вращаются вокруг датчика Холла.
- Импульсный сигнал от датчика передается на блок контроля.
- Блок, получив электрический импульс, передает на колесо напряжение заданной величины для запуска электрического двигателя.
- Двигатель запускается и приводит в движение мотор-колесо.
Такая система способна работать без ручек газа, но является не безопасной. Мотор-колесо без дополнительного контроля может самопроизвольно увеличить скорость.
Характеристики и схемы подключения
Элементы Холла в конструкции электрических самокатов имеют разные характеристики. Из-за этого они не могут быть взаимозаменяемыми. Например, элемент Холла в ручке газа нельзя устанавливать на колесо.
Модель «SS41» имеет следующие характеристики:
- Устанавливается только на колесо.
- Относится к биполярному цифровому типу.
- Рабочее напряжение 4.5–24 В.
- Потребляемы ток 15 мА.
- Выходной контакт имеет направление втекания тока.
Эти элементы стоят непосредственно на статоре двигателя.
Модель «SS49Е» для ручки газа. Характеристики:
- Тип линейный.
- 2.Рабочее напряжение 3.0–6.5 В.
- Максимальный выходной ток 20 мА.
- Время отклика 3 мс.
- Аналогичные устройства на рынке — AH49E, SS-49(E), 49E.
Для обоих типов датчиков характерна рабочая температура в пределах 40–110 градусов. При замене неисправных датчиков очень важно обращать внимание, какие элементы используются в качестве аналогов. Они должны полностью совпадать по своим характеристикам с вышедшим из строя элементом.
Заключение
Датчики Холла для электрического транспорта имеют важное значение. Они помогают значительно сократить количество механических деталей и узлов. За счет установки миниатюрных устройств, производители существенно увеличивают рабочие характеристики и постоянную динамику вращения мотор-колеса таких транспортных средств.
Датчики Холла для бесколлекторного двигателя: возвращение квадратурных энкодеров
Это уже третья статья, рассказывающая о квадратурных декодерах, на сей раз с применением к управлению бесколлекторными двигателями.
Ликбез: принцип работы бесколлекторного двигателя
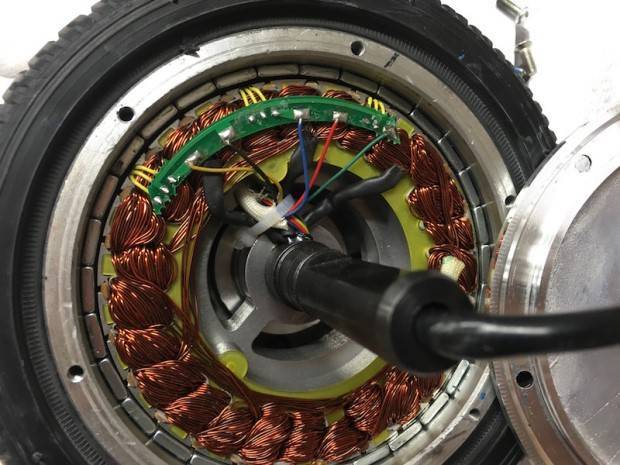
В качестве иллюстрации я возьму очень распространённый двигатель с двенадцатью катушками в статоре и четырнадцатью магнитами в роторе. Вариантов намотки и количества катушек/магнитов довольно много, но суть всегда остаётся одной и той же. Вот фотография моего экземпляра с двух сторон, отлично видны и катушки, и магниты в роторе:

Чтобы было ещё понятнее, я нарисовал его схему, полюса магнитов ротора обозначены цветом, красный для северного и синий для южного:
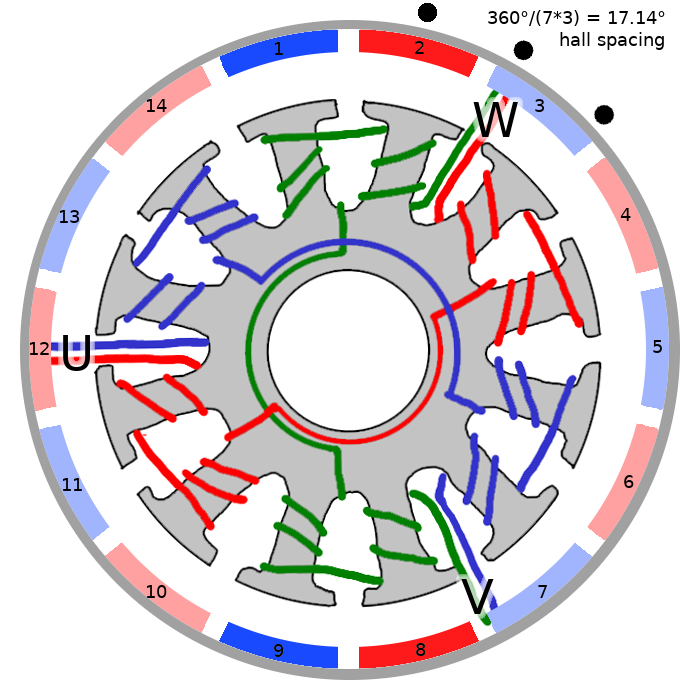
На датчики холла пока не обращайте внимания, их всё равно нет 🙂
Что будет, если подать плюс на вывод V, а минус на вывод W (вывод U не подключаем ни к чему)? Очевидно, будет течь ток в катушках, намотанных зелёным проводом. Катушки намотаны в разном направлении, поэтому верхние две катушки будут притягиваться к магнитам 1 и 2, а нижние две к магнитам 8 и 9. Остальные катушки и магниты в такой конфигурации роли практически не играют, поэтому я выделил именно магниты 1,2,8 и 9. При такой запитке мотора он очевидно крутиться не будет, и будет иметь семь устойчивых положений ротора, равномерно распределённых по всей окружности (левая верхняя зелёная катушка статора может притягивать магниты 1, 3, 5, 7, 9, 11, 13).
Давайте записывать наши действия вот в такую табличку:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
А что будет, если теперь подать плюс на U и минус на W? Красные катушки притянут к себе магниты 3,4,10 и 11, таким образом чуть-чуть повернув ротор (я по-прежнему выделяю магниты, за которые ротор тянет):
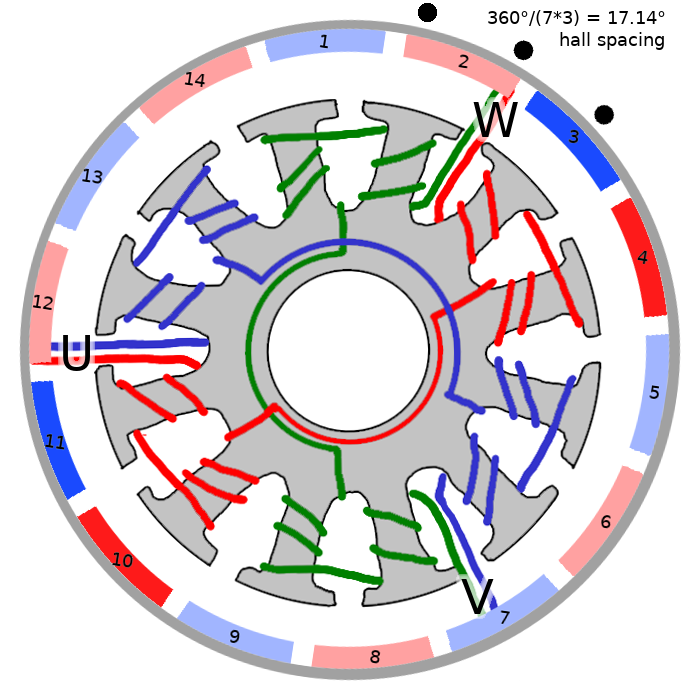
Давайте посчитаем, на сколько повернётся ротор: между щелями магнитов 1-2 и 3-4 у нас 51.43° (=360°*2/7), а между соответствующими щелями в статоре 60° (=360°/12*2). Таким образом, ротор провернётся на 8.57°. Обновим нашу табличку:
| Угол поворота ротора | U | V | W |
| 8.57° | + | n.c. | — |
Теперь сам бог велел подать + на U и — на V!
| Угол поворота ротора | U | V | W |
| 17.14° | + | — | n.c. |
Теперь опять пора выровнять магниты с зелёными катушками, поэтому подаём напряжение на них, но красный и синий магниты поменялись местами, поэтому теперь нужно подать обратное напряжение:
| Угол поворота ротора | U | V | W |
| 25.71° | n.c. | — | + |
C оставшимися двумя конфигурациями всё ровно так же:
| Угол поворота ротора | U | V | W |
| 34.29° | — | n.c. | + |
| Угол поворота ротора | U | V | W |
| 42.85° | — | + | n.c. |
Если мы снова повторим самый первый шаг, то наш ротор провернётся ровно на одну седьмую оборота. Итак, всего у нашего мотора три вывода, мы можем подать напряжение на два из них шестью разными способами 6 = 2*C 2 3, причём мы их все уже перебрали. Если подавать напряжение не хаотично, а в строгом порядке, который зависит от положения ротора, то двигатель будет вращаться.
Запишем ещё раз всю последовательность для нашего двигателя:
| Угол поворота ротора | U | V | W |
| 0° | n.c. | + | — |
| 8.57° | + | n.c. | — |
| 17.14° | + | — | n.c. |
| 25.71° | n.c. | — | + |
| 34.29° | — | n.c. | + |
| 42.86° | — | + | n.c. |
Есть один нюанс: у обычного коллекторного двигателя за переключение обмоток отвечают щётки, а тут нам надо определять положение ротора самим.
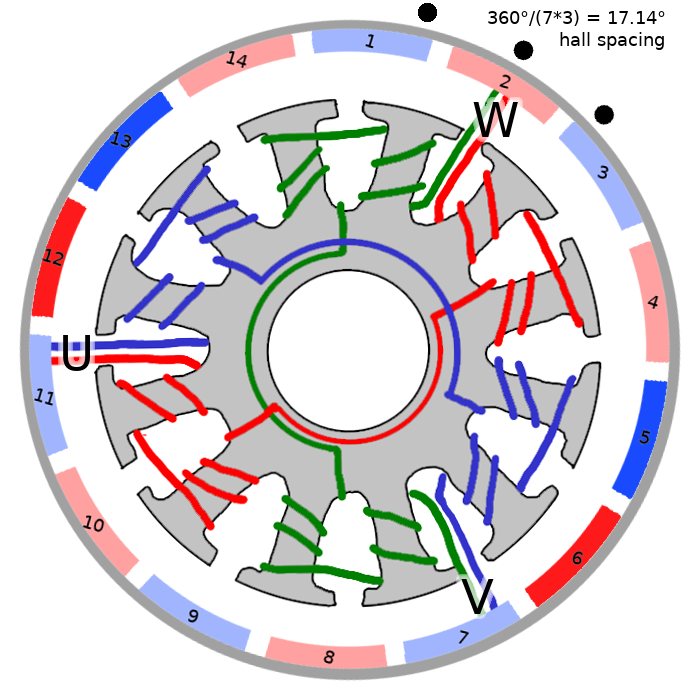
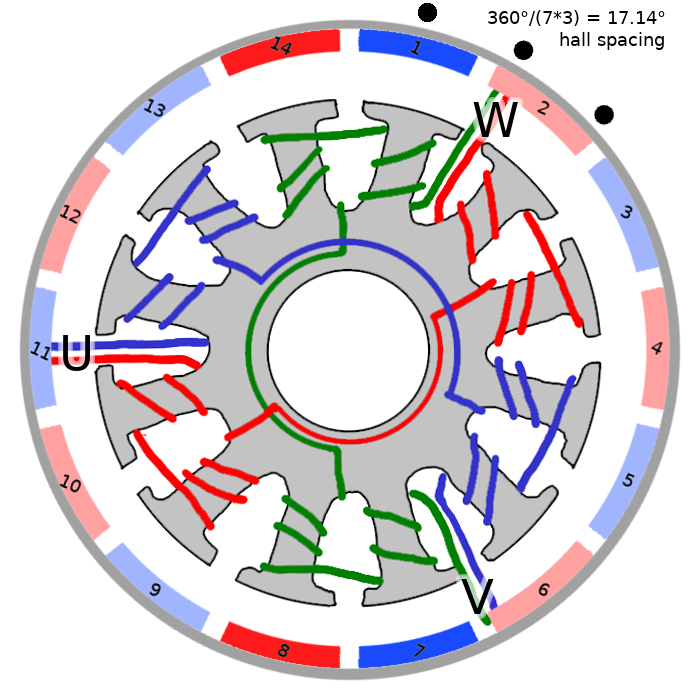
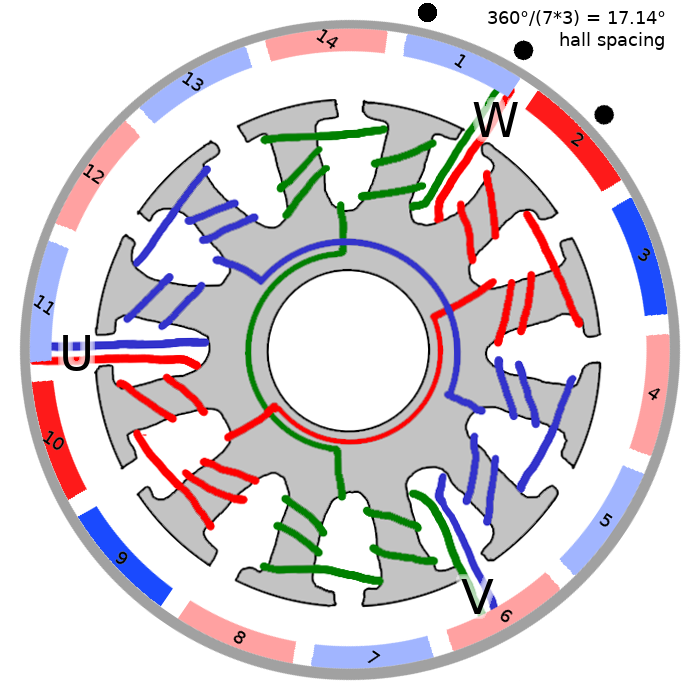
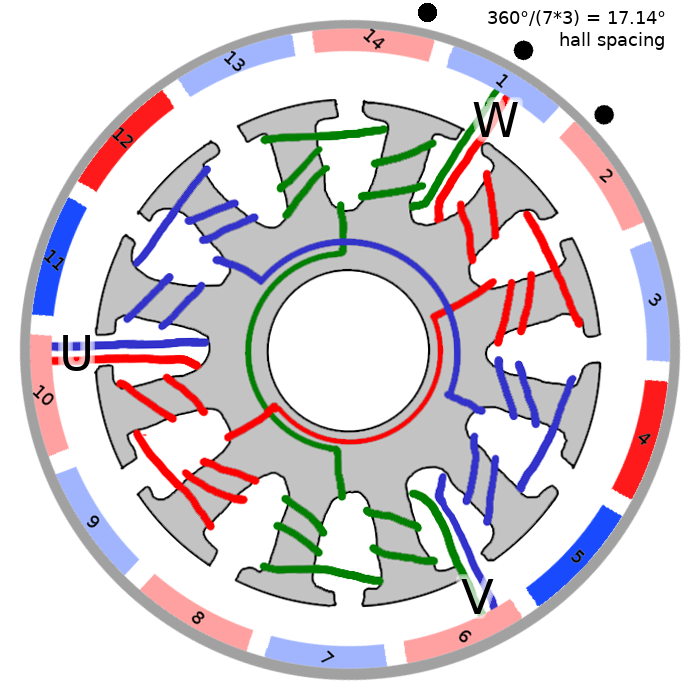
Датчики Холла
Теперь давайте поставим три датчика холла в те чёрные точки, обозначенные на схеме. Давайте договоримся, что датчик выдаёт логическую единицу, когда он находится напротив красного магнита. Всего существует шесть (сюрприз!) возможных состояний трёх датчиков: 2 3 — 2. Всего возможных состояний 8, но в силу расстояния между датчиками они не могут все втроём быть в логическом нуле или в логической единице:

Обратите внимание, что они генерируют три сигнала, сдвинутые друг относительно друга на 1/3 периода. Кстати, электрики используют слово градусы, говоря про 120°, чем окончательно запутывают нубов типа меня. Если мы хотим сделать свой контроллер двигателя, то достаточно читать сигнал с датчиков, и соответственно переключать напряжение на обмотках.
Для размещения датчиков я использовал вот такую платку, дизайн которой взял тут. По ссылке лежит проект eagle, так что я просто заказал у китайцев сразу много подобных платок:
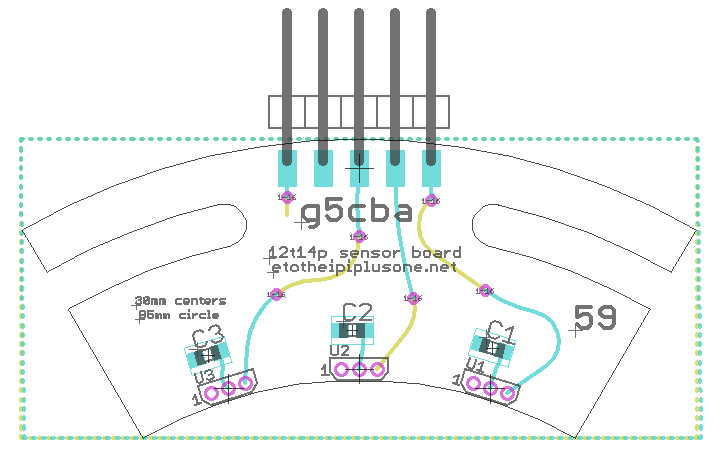
Эти платки несут на себе только три датчика холла, больше ничего. Ну, по вкусу можно поставить конденсаторы, я не стал заморачиваться. Очень удобно сделаны длинные прорези для регулировки положения датчиков относительно статора.
Постойте, но ведь это очень похоже на квадратурный сигнал с обычного инкрементального энкодера!
Ещё бы! Единственная разница, что инкрементальные энкодеры дают два сигнала, сдвинутые друг относительно друга на 90°, а у нас три сигнала, сдвинутые на 120°. Что будет, если завести любые два из них на обычный квадратурный декодер, например, той же самой синей таблетки? Мы получим возможность определять положение вала с точностью до четырёх отсчётов на одну седьмую оборота, или 28 отсчётов на оборот. Если вы не поняли, о чём я, прочтите принцип работы квадратурного декодера в первой статье.
Я долго думал, как же мне использовать все три сигнала, ведь у нас происходит шесть событий на одну седьмую оборота, мы должны иметь возможность получить 42 отсчёта на оборот. В итоге решил пойти грубой силой, так как синяя таблетка имеет кучу аппаратных квадратурных декодеров, поэтому я решил в ней завести три счётчика:
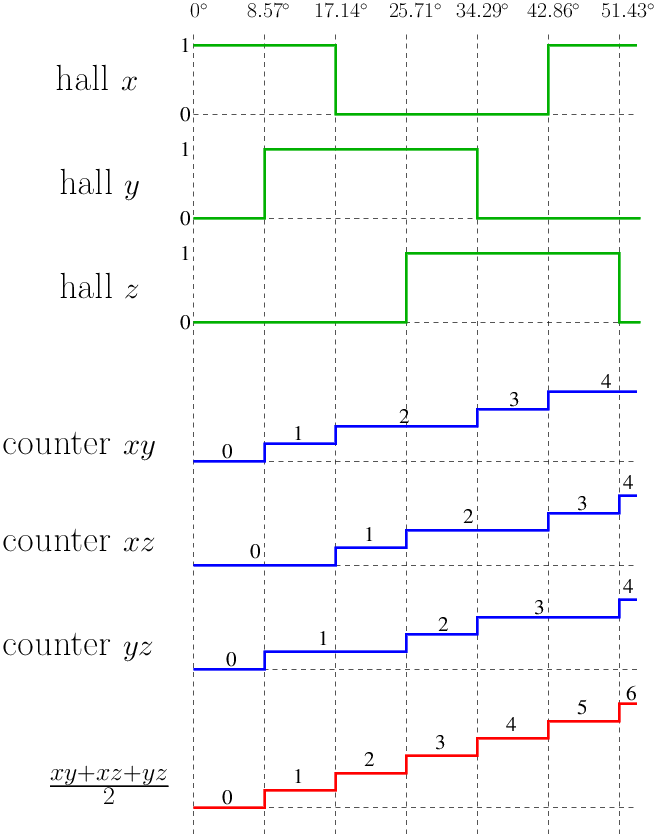
Видно, что при каждом событии у нас увеличиваются два из них, поэтому сложив три счётчика, и поделив на два, мы получим равномерно тикающий определитель положения вала, с точностью до 6*7 = 42 отсчёта на оборот!
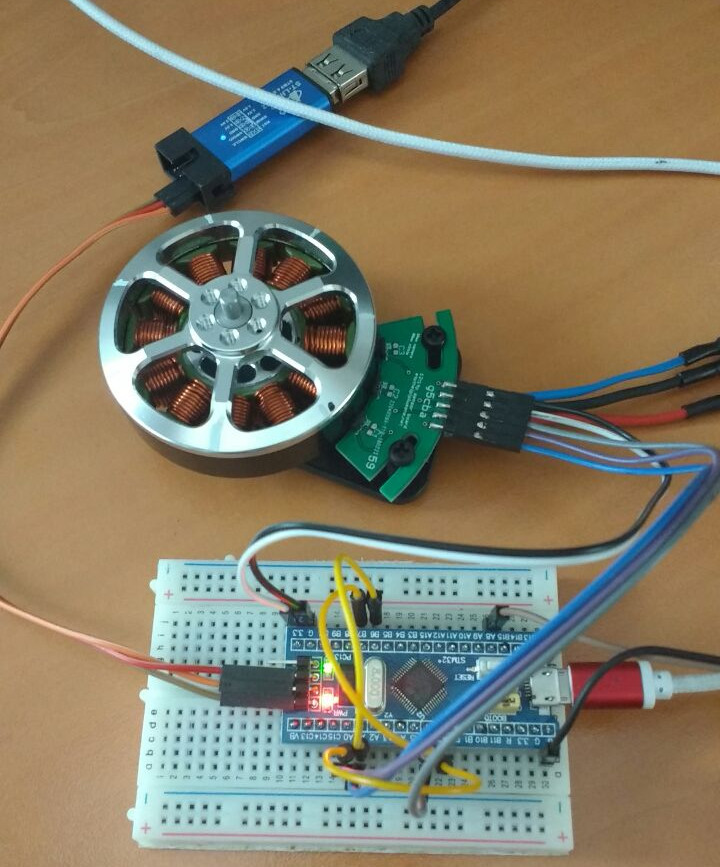
Вот так выглядит макет подключения датчиков Холла к синей таблетке:
А почему на двигателе сразу нет датчиков?
В некоторых приложениях (например, для коптеров) все эти заморочки не нужны. Контроллеры пытаются угадать происходящее с ротором по току в катушках. С одной стороны, это меньше заморочек, но с другой стороны, иногда приводит к проблемам с моментом старта двигателя, поэтому слабоприменимо, например, в робототехнике, где нужны околонулевые скорости. Давайте попробуем запитать наш движок от обычного китайского коптерного ESC (electronic speed controller).
Мой контроллер хочет на вход PPM сигнал: это импульс с частотой 50Гц, длина импульса задаёт обороты: 1мс — останов, 2мс — максимально возможные обороты (считается как KV двигателя * напряжение).
Вот здесь я выложил исходный код и кубовские файлы для синей таблетки. Таймер 1 генерирует PWM для ESC, таймеры 2,3,4 считают соответствующие квадратурные сигналы. Поскольку в прошлой статье я крайне подробно расписал, где и что кликать, то здесь только даю ссылку на исходный код.
На вход моему ESC я даю пилообразное задание скорости, посмотрим, как он его отработает. Вывод синей таблетки лежит тут, а код, который рисует график, тут.
Поскольку у меня двигатель имеет номинал 400KV, а питание я подал 10В, то максимальные обороты должны быть в районе 4000 об/мин = 419 рад/с. Ну а вот и график подоспел:
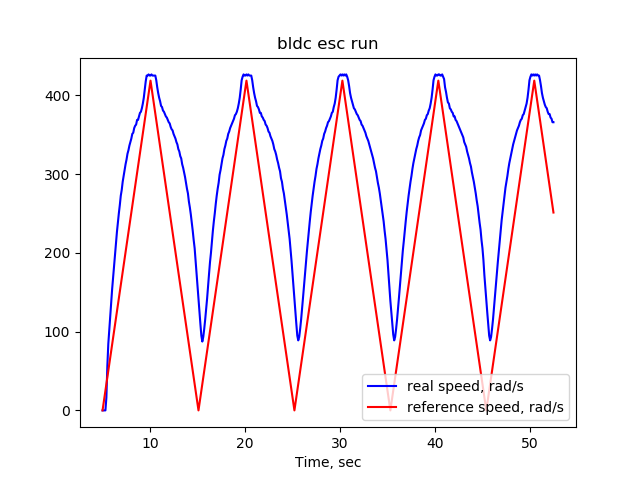
Видно, что реальные обороты соответствуют заданию весьма приблизительно, что терпимо для коптеров, но совершенно неприменимо во многих других ситуациях, почему, собственно, я и хочу использовать более совершенные контроллеры, которым нужны сигналы с датчиков холла. Ну и бонусом я получаю угол поворота ротора, что бывает крайне полезно.
Подводим итог
Я провёл детство в обнимку с этой книжкой, но раскурить принципы работы бесколлекторников довелось только сейчас.
Оказывается, что шаговые моторы и вот такое коптерные моторчики — это (концептуально) одно и то же. Разница лишь в количестве фаз: шаговики (обычно, бывают исключения) управляются двумя фазами, сдвинутыми на 90°, а бесколлекторники (опять же, обычно) тремя фазами, сдвинутыми на 120°.
Разумеется, есть и другие, чисто практические отличия: шаговики рассчитаны на увеличение удерживающего момента и повторяемость шагов, в то время как коптерные движки на скорость и плавность вращения, что сказывается на количестве обмоток, подшипниках и т.п. Но в итоге обычный бесколлекторник можно использовать в шаговом режиме, а шаговик в постоянном вращении, управление у них будет одинаковым.