USB-polygon-20: Мышиный энкодер
Перед тем, как перейти к теме выпуска, хочу упомянуть об исправлении, которое пришлось внести в код, а заодно о проявлении ошибки и поиске причин.
В одном из предыдущих опусов я заметил, что почему-то устройство перестало запускаться после перепрошивки. Возникла необходимость перезапускать питание. А с учетом того, что отдельной кнопки или тумблера для перезапуска питания нету, надо каждый раз выдергивать и вставлять обратно разъем USB-кабеля. Это само по себе неудобно, да и подход неправильный: если есть проблема, надо в ней разобраться, и после прояснения ситуации либо решить, либо плюнуть, но уже хотя бы зная в чем дело.
В общем, нашел ошибку в коде.
В третьем опусе цикла я уже описывал, что сталкивался с подобной проблемой в самом начале работы над проектом, и виноват был сторожевой таймер — «собака». Однако в коде с использованием библиотеки LUFA это вроде бы предусмотрено. В функции SetupHardware() в самом начале есть такой код, отключающий «собаку»:
Сперва предположил, что этот участок не выполняется, потому что макроопределение ARCH не установлено.
Кстати сказать, в makefile переменная ARCH = AVR8 — это совсем другое, она действует только в makefile , и к коду программы отношения не имеет, хотя должна соответствовать одноименному макроопределению в коде, этого требует документация библиотеки LUFA. И в принципе можно бы определить макрос при помощи переменной CC_FLAGS в makefile , прибавив к ней -DARCH=0 ( ARCH_AVR8 определено как 0 ), но это не обязательно. MassStorage.c содержит строчку #include «MassStorage.h» , в данном файле есть #include <LUFA/Drivers/USB/USB.h> , который в свою очередь содержит #include «../../Common/Common.h» , где записано #include «Architectures.h» , а там, наконец, есть такой код:
А так как __DOXYGEN__ у меня нигде не определен, ARCH по умолчанию будет определен как ARCH_AVR8 .
Кстати, анализ файла MassStorage.lss показывает, что таки да, код после условия #if (ARCH == ARCH_AVR8) компилируется. Тогда в чем дело?
А дело банально в том, что перед вызовом SetupHardware() я навставлял кучу кода, связанного с инициализацией экрана от мобильника. И к тому времени, как доходит дело до остановки «собаки», она уже успевает «гавкнуть». И надо всего-навсего поднять вызов SetupHardware() на самый верх функции main() .
Теперь программа запускается после перепрошивки устройства без дополнительных телодвижений кабелем или кнопками. Можно продолжать далее по теме.
Энкодер мыши
Оказалась под рукой неисправная беспроводная оптическая мышь. Не то, чтобы совсем напрочь дохлая, но пользоваться ею уже очень некомфортно: левая кнопка требует усиленного, а порой и неоднократного нажатия, ролик (точнее, резиновая «шина» на нем) проскальзывает. В принципе, это все восстановимо, но мышь не моя, зато я купил в подарок на замену новую, а эту забрал, иначе ей бы путь на мусорку.
Можно будет попробовать починить, можно разобрать на детали и использовать корпус, но это все потом. Сначала хочу побаловаться с энкодером.
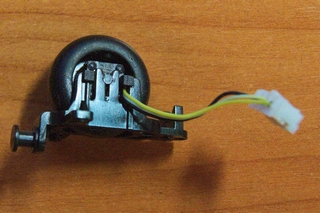
Ролик (или колесико) мыши — съемный узел. В его состав входят:
- «Качелька», которая служит для крепления собственно энкодера, а также давит на кнопки. В моем случае таких кнопок три, так как на ролик можно не только нажимать, но и качать вправо – влево;
- Энкодер с шестигранным отверстием для оси ролика и тремя проводами, которые через разъем подключаются к плате мыши;
- Пластиковый ролик на оси. Так сказать, колесный диск. Ось с краев круглого сечения для нормального вращения в точках крепления «качельки», а по центру шестигранная для зацепа в энкодере;
- Резиновая шина (ну, или покрышка, как хотите).
Из мыши этот узел извлекается необычайно просто: отключается от платы разъем и выщелкивается из единственной точки крепления «качелька». Далее узел также легко разбирается на составные детали.

Энкодер сам по себе (без «качельки» и ролика) использовать неудобно. Поэтому буду применять его в сборе, только резинку сниму, ибо проскальзывает. За «качельку» удобно держать, а за ролик удобно крутить.
Итак, у энкодера имеются три провода: белый, желтый и черный. Можно не сомневаться, что белый и желтый — это фазы A и B (не обязательно именно в этом соответствии), а замыкаются они при вращении на черный. Тестер в режиме омметра подтверждает это предположение. Заодно определяем, что при вращении энкодера тактильно ощущаются 18 щелчков, причем, на каждый щелчок приходится две смены общего состояния выводов: по одному перепаду на каждом выводе.
Хотелось применить энкодер вместо кнопок для изменения картинки на подключенном экране мобильника, как в опусе 18. Там было подготовлено 20 кадров в расчете на энкодер KY-040, который предполагалось заказать на Aliexpress. Но побаловаться с запчастями от полудохлой мыши интереснее, особенно в рамках нищебродского проекта с минимальным бюджетом.
Значит, надо переписать файл для SD-карты на 18 кадров, изменив «стрелочки» на каждом кадре для равномерности. Кроме того, в коде программы заменить cnt20 на cnt18 , cnt20old на cnt18old , и проверку переполнения счетчика делать сравнением не с 19, а с 17.
Подключение энкодера
Энкодер следует подготовить к подключению. Порты контроллера ожидают логические уровни, а энкодер пока что может только замыкать два провода на третий. Стало быть, подключим черный провод к «корпусу», а белые через подтягивающие резисторы — к +3,3 В. Таким образом, разомкнутый белый провод, подключенный к выводу порта, будет показывать логическую единицу, а замкнутый — логический ноль. При вращении энкодера состояние выводов будет последовательно изменяться.
Теперь о том, куда подключать. На порту B остался всего один свободный вывод, а для энкодера нужно два. Можно задействовать порт C, на котором «сидят» кнопки. Нижние две из них используются для переключения «спецрежима», а точнее, флаговой переменной canDo .
Отныне буду для этой цели использовать одну среднюю кнопку. В блоке, отвечающем за опрос кнопок я заменяю код, который четвертой кнопкой включал canDo , а пятой — выключал:
на код, который третьей кнопкой переключает этот флаг:
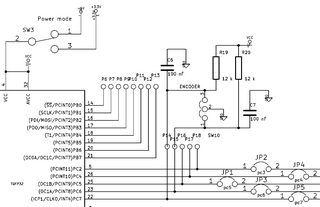
А вот измененный фрагмент схемы:
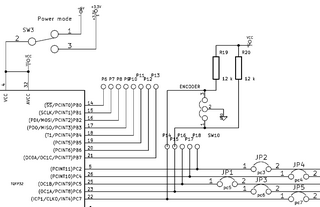
Раз уж эта механическая деталь занимается тем, что замыкает-размыкает два контакта на третий, не буду заморачиваться с поиском специализированного обозначения, а нарисую в виде перемычечного выключателя на три контакта.
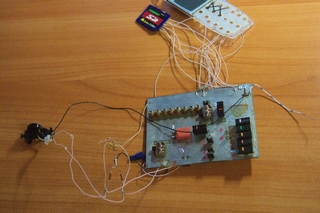
Перемычки JP3 и JP5, соответствующие портам 6 и 7, снимаю, таким образом, порты нижних кнопок освободились, и к их контактным площадкам можно подпаять выводы энкодера. Но не просто так, а с джамперными пинами, которые воткну в разъемчик энкодера. Добавлю кошмара к устройству. Сплошной навесной монтаж, куча проводов. «Пудель», одним словом. Но это ненадолго, скоро все разберу, а для отладочной времянки допустимо. На фото виднеются емкости, о которых расскажу несколько ниже.

Обработка событий энкодера
В таком варианте подключения энкодер при вращении выдает последовательность импульсов. Причем, импульсы на белом проводе смещены относительно импульсов на желтом проводе. А направление смещения зависит от направления вращения.
Допустим, изначально на обоих проводах «0». При вращении сначала изменится состояние одного провода, будет «1» и «0». Потом изменится состояние второго провода, получим «1» и «1». Затем снова будет изменение на первом: «0» и «1». И, наконец, все вернется в исходное: два нолика.
Если рассматривать два провода, как двухразрядное число, получается такое изменение: 0 -> 2 -> 3 -> 1 -> 0 -> … при вращении в одну сторону, или 0 -> 1 -> 3 -> 2 -> 0 -> … в другую.
При обсуждении этого дела на форумах в этом месте обязательно кто-нибудь начинает кричать: «Это же код Грея!» Ну да, код Грея. По определению и исходя из принципа действия энкодера. Это код, в котором последовательно расположенные числа отличаются друг от друга на один разряд. Ну и что? Да, код Грея легко привести к последовательности натуральных чисел. Буквально в пару операций. Но зачем? Совершенно спокойно можно его использовать в прямом виде.
Можно реагировать на событие изменения состояния энкодера по прерываниям. Но я желаю опрашивать энкодер по таймеру. У меня в программе устройства уже есть опрос нажатия кнопок, туда и вставлю. Не вижу смысла задействовать лишние прерывания. Тем более, что энкодер механический, а значит — дребезг, а значит — ложные срабатывания и все такое…
Итак, в произвольный момент времени можно опросить энкодер и узнать состояние его проводов. Но само по себе состояние не интересно, потому что вращение — это процесс, протекающий во времени. Состояние важно в сравнении с предыдущим состоянием. Если оно не изменилось, то скорее всего и вращения не было (хотя, есть возможность, что было ровно на два щелчка, но это вряд ли). А если изменилось, то можно определить не только факт поворота, но и направление.
Составлю табличку зависимости текущего состояния от предыдущего:
| \ | 0 | 2 | 3 | 1 |
|---|---|---|---|---|
| 0 | 0 | + | x | — |
| 2 | — | 0 | + | x |
| 3 | x | — | 0 | + |
| 1 | + | x | — | 0 |
Таблица симметричная, так что можно текущим состоянием считать хоть первую строку, хоть первый столбец, это индифферентно.
«0» означает, что вращения не было. Оно и понятно: если текущее состояние равно предыдущему… «+» означает вращение в прямом направлении, «-» — в обратном. Понятия «прямой» и «обратный» довольно-таки относительны и еще зависят от того, какой провод мы выберем фазой А, а какой — Б. «x» соответствует ошибке: такой переход в нормальной ситуации возникнуть не может, значит, ошибка вызвана либо дребезгом контактов, либо слишком быстрым поворотом вала энкодера, либо сбоем программы (например,вызвавшим аномальную задержку между последовательными опросами), либо метафизическими причинами.
Итого имеется 16 вариантов сочетания последовательно считанных состояний и три варианта действий: бездействие, инкремент счетчика поворота и декремент счетчика. Ошибку можно обрабатывать как-то дополнительно, но я не вижу в этом особого смысла и необходимости.
| старое состояние |
новое состояние |
код (hex) |
действие |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 2 | 2 | + |
| 0 | 3 | 3 | x |
| 0 | 1 | 1 | — |
| 2 | 0 | 8 | — |
| 2 | 2 | A | 0 |
| 2 | 3 | B | + |
| 2 | 1 | 9 | x |
| 3 | 0 | C | x |
| 3 | 2 | E | — |
| 3 | 3 | F | 0 |
| 3 | 1 | D | + |
| 1 | 0 | 4 | + |
| 1 | 2 | 6 | x |
| 1 | 3 | 7 | — |
| 1 | 1 | 5 | 0 |
Добавляю в код обработку энкодера. Сперва перед основным циклом программы добавляю пару переменных:
В первой младшие 4 разряда будут содержать текущее и предыдущее состояние энкодера, а вторая будет реагировать на изменения. Соответственно, первая — беззнаковая, а вторая — знаковая, чтобы нормально реагировать на вращение вперед, назад и в другие стороны.
Далее, сразу после обработки нажатия на третью кнопку (упомянутого чуть выше) добавляю такой код:
Два замечания помимо комментариев в коде: во-первых, код избыточен, достаточно восьми case (четыре плюса и четыре минуса), но так нагляднее; во-вторых, счетчик энкодера переписывается в счетчик cnt18 , вывод которого на экран мобильника в виде «циферблата» уже реализован.
Компилирую, прошиваю, запускаю. На экране мобильника появляется логотип, на светодиодах — счетчик. Нажимаю третью кнопку. Счетчик на светодиодах пропадает, на экране появляется «циферблат» с нулями и «стрелкой» вверху.
Медленно проворачиваю ролик энкодера — «циферблат» изменяется, циферки увеличиваются или уменьшаются, «стрелочка» поворачивается в соответствии с направлением, как в опусе 18. Но есть небольшие сбои: часть щелчков энкодера пропускается, а иногда «стрелочка» дергается назад. На быстрое вращение реакция вообще странная: то «циферблат» не изменяется, то сразу прыгает на несколько значений в произвольном направлении.
Некоторое время думал над кодом. Попробовал увеличить время опроса, перепрограммировав таймер, сначала в 256 раз, потом еще в 8 — не помогло. Попробовал сделать проверку состояния по прерываниям, несколько изменив логику защиты от дребезга — тоже нисколько не улучшилось. Я догадывался, что дело в дребезге, но осциллографа дома нету, а до ближайшего прибора тащить далеко и неудобно. Но все-таки добрался я до средств измерения и малость ужаснулся.
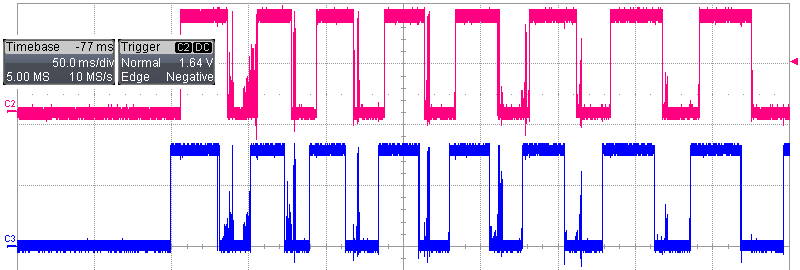
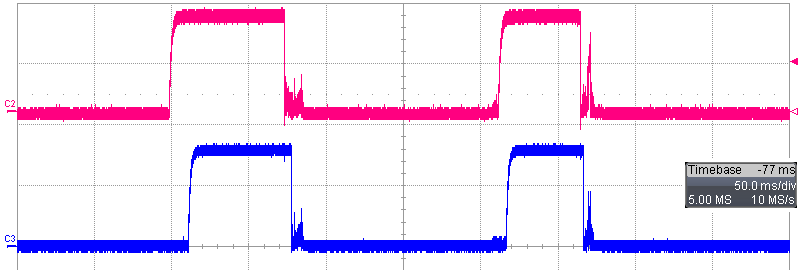
При медленном повороте порой все почти в порядке:
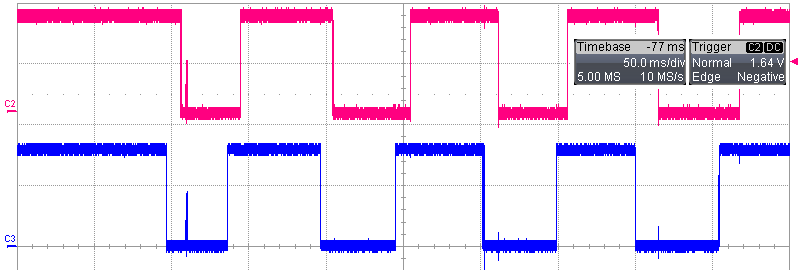
Однако чаще всего даже при медленном вращении есть заметный дребезг, который хорошо отсеивается программой:
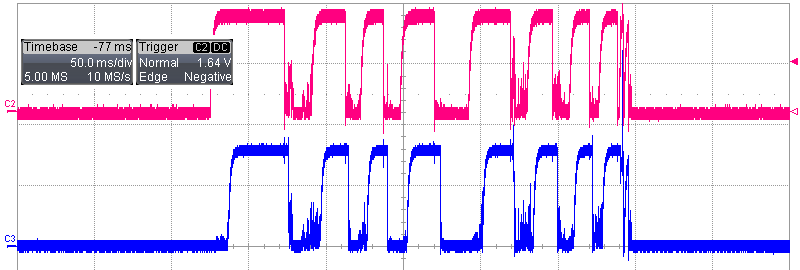
А вот при быстрой прокрутке вообще кошмар:
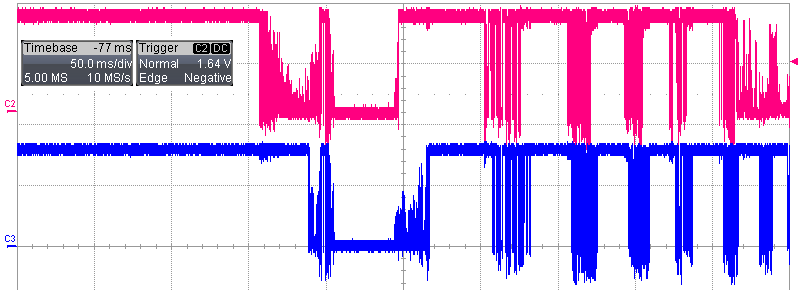
Короткие импульсы сплошняком заполнены дребезгом! Это невозможно обработать программно никаким автоматом. И наверхосытку такая одиночная прокрутка:
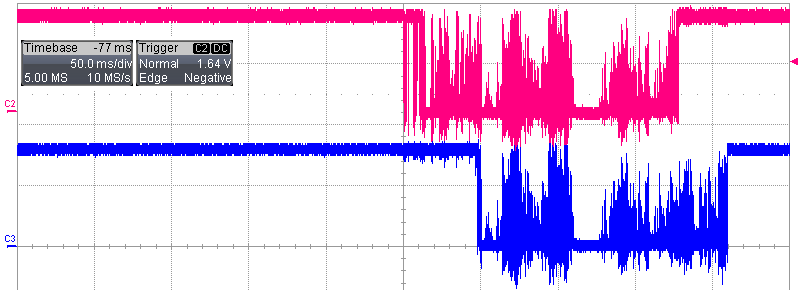
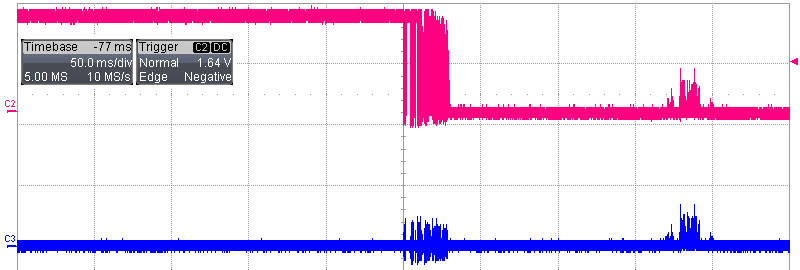
И укрупненно отдельный срез:
В общем, только программными методами это победить нереально. Надо ставить фильтр. Резистор стоит и так — подтягивающий, на 12 килоом, — добавлю емкость, и получится RC-цепочка, «сливающая» короткие импульсы на корпус. Вот измененный фрагмент схемы с добавкой конденсаторов:
Вот только какую емкость поставить? Правильный подход — выяснить длительность самого длинного всплеска дребезга и самого короткого импульса при быстрой прокрутке вала, и рассчитать емкость для такой постоянной времени RC-цепочки, чтобы фильтр как можно меньше портил импульсы и как можно больше портил дребезг.
Но суровая реальность ограничивает мой выбор пары конденсаторов тремя вариантами (если отбросить то, что меньше единиц нанофарад и больше десятков микрофарад, которые не подойдут даже по беглой прикидке). Есть 2,2 мкФ, 10 нФ и 100 нФ. Как настоящий радиолюбитель, буду сначала паять, потом считать.
Начну с номинала побольше и припаяю (на проводах, конечно же) пару электролитических, минусом на землю. Ну что ж, у дребезга нет никаких шансов. При медленной прокрутке вала фронты импульсов дико завалены по красивой экспоненте. При быстрой прокрутке фронты тоже завалены, естественно, поэтому они не успевают вырасти до уровня логической единицы. Так что «циферблат» реагирует только на медленный проворот, зато без сбоев.
Ну, теперь можно и посчитать. 12 kilo * 2.2 micro = 0.0264 За это время (в секундах) фронт импульса достигнет 1 — 1/e от единицы, это около 63%. А в три раза позже, через 0,0792 с, фронт достигнет 95%. То есть, импульсы длительностью 80 мс до напряжения питания дойдут, хоть и некрасивые, а то, что покороче — под вопросом. А при быстрой прокрутке импульсы имеют длительность около 10 мс.
Возьмем самый маленький номинал из трех. 12 kilo * 10 nano * 3 = 0.00036 . Импульсы длительностью 360 мкс будут пропускаться. Да и 100 мкс могут быть замечены выше уровня логической единицы. Практика показала, что дребезг почти весь остается.
Ставлю 100 нФ, постоянная времени 1,2 мс. Картинка на медленном вращении такая:
Дребезг на фронтах отсеен совсем, а на срезе либо подавлен, либо доведен до такого состояния, что программный автомат легко с ним справляется. А вот быстрый проворот:
Картина примерно такая же, дребезг в рамках допустимого, работе не мешает.
Эпилог
Подключить энкодер получилось более-менее успешно. Ни одно животное при этом не пострадало: мышь была восстановлена. Энкодер вернул на место, предварительно вымыв колесный диск и шину с мылом и капнув немного суперклея. Теперь ролик не проскальзывает. И заменил дохлую кнопку на исправную, снятую с каких-то мышиных обломков. В качестве бонуса оказалось, что «новая» кнопка еще и тихая. Короче, мышь снова в строю. И при проверке оказалось, что ее ролик в составе мыши работает даже хуже, чем в составе моего устройства: медленная прокуртка длинных страниц иногда отпрыгивает на шаг назад, а быстрая не работает. Так что не вполне качественная работа энкодера — это не кривой код и не кривые руки. Иногда так бывает — и вправду деталь виновата.
Как устроен энкодер (датчик) колёсика мыши?

там контакты поочередно со сдвигом относительно друг друга и ползунковый контакт.
при вращении замыкаются контакты по очереди: 1-2, 1-2, 1-2 в одну сторону и 2-1, 2-1, 2-1 в другую.
Такие механические энкодеры очень быстро дохнут, так что это нормально.
Просто стирается подвижный контакт-щетка.
Запасайся запасными энкодерами и не брезгуй собирать старые или б/ушные мыши, будут энкодеры на замену запасные.
У Logitech вроде всех сейчас мыши с оптическим энкодером колеса, как в старые добрые времена. Единственный минус — это механизм трещотки не очень хороший.
Энкодеры колесо мыши принцип работы
Кодировщик мыши — это тип механического инкрементального энкодера роторный с данными обратной связи поворотного направления и скорости вращения.
К услугам гостей стандартный интерфейс роща, что сэкономит много работы в проводки и программирования. Кроме того хорошо приспособлен для тяжелых и суровых условиях. Этот продукт может применяться в игрушки, роботов и потребительских устройств ввода.
Примечание
Скорость вращения должна быть меньше 1000 rad/мин (радиан в минуту).
· Универсальность для различных условий.
· Хорошо приспособлены для тяжелых и суровых условиях.
· С фиксацией и приятный.
· Точные и надежные.
Приложения
Это универсальный для различных приложений в суровых условиях, таких как игрушки, робототехника и потребительские устройства ввода.
Прокрутки мыши работает с использованием вращающихся энкодера для определения направления и движение колесо
Но поворотный энкодер имеет свои преимущества и недостатки
как мы увидим в следующих tutorial.s
Ротари кодировщик, также называется осью кодировщика или генератор импульсов, является электро механические устройства, используемый для преобразования угловое положение оси в цифровой код, который делает его класса преобразователя.
Что внутри "безщелчкового" энкодера Mi Portable Mouse. "Допилинг" и замена. Пост о безымянных и "фирменных" китайских энкодерах.

Мышь покупалась как Новогодний подарок любимой доче. Небольшая, беспроводная, удобная. Помню меня тогда сильно озадачил плавный скролл. Что ж, через три года он таки приказал долго жить))) Кому любопытно, что у него внутри и чем это заменить — добро пожаловать под кат.

Интернет подсказывает, что корпоративный слоган Сяоми (Шао-Ми) — «Инновации для каждого!» Значит плавный скролл у этой мышки не брак производства, а инновация! Теперь правда, вместо плавного пролистывания страниц, сплошное дёрганье…
Осмотр

Мышь разбирается очень легко — один винт в отсеке с батарейками, две защелки по бокам корпуса, приподнять и сдвинуть верхнюю часть с кнопками назад. Еще два винта потрачено китайцами на крепление платы. 
Позабавили все три свича))) Из-за малого роста грызуна все три кнопки плоские. Сенсор явно не игровой — PixArt PMW3610DM, на 3200 dpi с шагом 200. За «синий зуб», а точнее за мультипротокол, отвечает видимо N51822 от Nordic Semiconductor. Осмотр энкодера показал, что в его конструкции «посмотреть» не предусмотрено. Верхняя часть, где обычно выглядывает зубчатое колесико и пружинка — закрыта корпусом. Размер энкодера (в моём случае от основания до оси) — 5 мм. Самый младший в линейке.
Вскрытие

Конструкция энкодера почти стандартная. Только пластинка-пружинка, прижимающее зубчатое колёсико, не имеет характерного выштампованного «горба» (сравнение с пружинкой обычного энкодера на последней картинке). С помощью этого «новшества» и достигался плавный скролл. 
За три года не напряженного использования в контактных площадках корпуса протёрлась внушительная колея. Лечение народными средствами, как то: прикладывание подорожника, чистка от грязи, смазывание вазелином, натирание грифелем — в моём случае вряд ли подойдёт.
Заказ
Порыскал по форумам, почитал комментарии и понял, что заказ энкодера с Али или Ебэя — та ещё лотерея. Сразу скажу, что мысль искать сяомишный «безщелчковый» энкодер — не посещала. А вот поставить с закрытым пылезащищённым корпусом (+100 к надёжности) — пожалуй да) Вот, что приметил для себя на Али:
1-1,5$ — 5 000 000 циклов
В основном попадались энкодеры на 7/8/9/10/11/12 мм, в нужном мне размере 5 мм — только нонейм. Срок жизни в расчет не брал, понаписать можно всякого… Сразу понравился Kailh 7 мм в закрытом корпусе, но с ним (судя по картинке) много «допилинга» под 5 мм. «Сделано в Япония» ALPS как то совсем не показался японским. Выбирал между Kailh и ТТС в обычном корпусе. По отзывам оба энкодера вменяемого качества. В итоге взял, где меньше пилить — ТТС на 7 мм.
А поскольку качество китайских энкодеров зависит исключительно от великого и безжалостного китайского рандома, купил ещё десяток нонеймов нужного размера. Разница в цене — почти в 10 раз)))


Сравнение
Моя бабушка говорила: «дешёвая рыбка — поганая юшка». Пока заказ доставлялся, еще была надежда сразу поставить 5 миллиметровый нонейм и ничего не пилить. Но нет, качества отвесили ровно по цене… Макрообъектива у меня нет, но всё же рискну показать разницу на фото.
Напомню, ТТС на один «размер» больше, но все выступающие ненужности будут отпилены под размеры правого собрата. У ТТС — ось почти не имеет люфта, у нонейма — ось ощутимо люфтит. «Щелчок» (не звук, а ощущение от попадания пружинки между зубчиков колеса с контактами) более мягкий у ТТС. 
У ТТС — аккуратная ровная штамповка, тиснение на ножках, есть название и размер.
У нонейма — металлическая часть идёт «волнами», отверстие выштамповано криво, в верхней части не прилегает к валу колёсика. Ножки плоские, из опознавательных знаков — только размер. 
У ТТС — скругление зубцов колёсика с контактами, пружина визуально толще, пластина плотно прилегает к пластиковому корпусу.
У нонейма — пластина плохо прилегает к корпусу, отверстие не соосно валу колеса. За пределами пластикового корпуса верхний край металлической пластины продавлен (штампом при сборке?) в сторону пружины… 
Доработка напильником

Тут всё просто: главное не отхватить лишнего))) При подгонке с 7 на 5 мм крепление и контакты пришлось подпиливать у самого основания корпуса. Помогла бормашинка, надфиль и позаимствованная у жены пилка для ногтей.
В итоге, получилось как то так… 
Я не большой спец по пайке, а навыков работы феном у меня ещё меньше (недавно купил себе Yihua 8858). Здесь же — 5 контактов подряд, между которыми предательски расположился какой то «наномонтаж» из резисторов, которые я даже в лупу плохо вижу)))
Поглядел Ютуб, снял насколько возможно старый припой оплёткой, сходил в магазин за сплавом Розе… И каким то каком, обильно сдабривая всё флюсом Mechanic, энкодер я таки достал. 
Отмывка флюса показала, что «наномонтаж» остался на своём месте, а дорожки уцелели. Впаял новый энодер, собрал мышА, проверил — работает))) Мало того, сразу возникло ощущение, что таким скролл и ДОЛЖЕН был быть изначально! 
Вместо выводов
Увы, чуда как с китайскими ОМРОНами не произошло. С качеством у заказанных нонеймов — просто беда. Ставить такие — не рискнул даже в качестве эксперимента. Хотя и они, наверное, худо-бедно — свою функцию выполняют. Правда и установленный «TTC Мыши декодер чувствовать себя точной точности жизни 5 миллионов раз 7 мм зеленый ядро» — не предел совершенства. Будет забиваться пылью, как и все остальные собратья схожей конструкции. Наверное, оптимальным выбором будет энкодер в корпусе Dust-free, хотя сяомишный даже такая конструкция не спасла)))
PS Всё написанное — чистейшее ИМХО и оценочные суждения. Без претензии на истину в последней инстанции)))
Всем добра!