Генераторы функциональных сигналов для тестирования устройств: недорогие модели с Aliexpress

ШИМ-сигнал (PWM) представляет собой последовательность импульсов, частота которых неизменна, а модулируется длительность импульсов. Большинство микроконтроллеров легко справляются с этой задачей, но что делать если нет желания программировать и использовать такое мощное средство для такой простой задачи? В этом случае можно использовать дискретные элементы.
Для начала необходимо сформировать последовательность пилообразных импульсов и подать ее на вход компаратора. На второй вход компаратора подается модулирующий сигнал, например, напряжение с переменного резистора. Если напряжение генератора выше напряжения на втором входе — на выходе напряжение близко к напряжению питания. Если напряжение генератора ниже — на выходе ноль.
На рисунке Uк — напряжение команды (постоянный уровень, заданный переменным резистором), Uген — напряжение генератора, UPWM — ШИМ-сигнал.


![]()

![]()

![]()



Генераторы функциональных сигналов для тестирования устройств: недорогие модели с Aliexpress
Бюджетные цифровые генераторы для проверки устройств, которые будут не только полезны в качестве хоббийного генератора для радиолюбителя, но и подойдут для профессионального тестирования и разработки компонентов. В подборке будут генераторы тестовых сигналов для проверки оборудования, телевизоров и мониторов, для управления двигателями (ШИМ), а также выскокочастотные генераторы, в том числе для радиосвязи, а также для модули DDS и ВЧ-генераторов для самостоятельной сборки.

С целью тестирования и проверки оборудования применяют различного вида сигналы нужной формы, частоты и скважности, амплитуды и т.п. Пример такого тестирования можно посмотреть в недавнем обзоре осциллографа Rubyster 1C15 с полосой до 110 МГц. Я использовал недорогой генератор JDS-2900 c диапазоном генерации до 60 МГц.

Генератор ШИМ сигналов за $4
Начну, пожалуй, с одного из самых-самых бюджетных вариантов, а именно с генератора PWM (ШИМ) сигналов FNIRSI XY-PWM1, с диапазоном генерации сигналов от 1 Hz до 150 KHz. Скважность, длительность и период повторения импульсов регулируются. Также предусмотрен таймер на отключение генерации. Настраивать удобно кнопками с контролем по дисплею. Устройство реализовано на базе контроллера Nuvoton серии N76, так что вариант интересный.

Генератор сигналов JDS2900-60M
Портативный функциональный генератор от Juntek — модель JDS2900-60М с диапазоном генерации 60 МГц. Представляет собой компактный цифровой двухканальный DDS генератор сигналов с выходом BNC (х2). Есть встроенный частотомер. Можно настроить сигнал под себя либо воспользоваться предустановленными (синус, меандр, пила). Что проверить таким? Да хоть новые модели осциллографов и мультиметров.

Простой DDS генератор сигналов
Простейшая модель для радиолюбителя, представляет собой DDS функциональный генератор сигналов на базе микроконтроллера. Устройство имеет частотный диапазон от 1 Гц- до 65534 Гц. Форму сигнала можно настроить: доступны синусоидальный, прямоугольный, треугольный сигналы на выходе. Фронты сигнала выдаёт чёткие. Большой диапазон регулировок и настроек. Выход — BNC разъемы. Провода и адаптеры для такого генератора можно изготовить самостоятельно. Такой генератор подойдет для тестирования и проверки аудиоустройств.

Генератор сигналов UNI-T UTG962
Отличный функциональный генератор сигналов произвольной формы от UNI-T. В лоте на выбор две модели: UNI-T UTG932 и UNI-T UTG962. Отличаются соответственно предельной частотой генерации: 30 МГц и 60 МГц соответственно. Обе модели двухканальные. Имеет большой экран и серьезный функционал, в том числе и изменение фазы. Внутри установлен прецизионный источник цифрового сигнала 200 Ms/s (14 bit DAC). Предусмотрен встроенный частотомер.

Модуль-генератор сигналов на базе Si5351 I2C до 160 МГц
Если вы ищете совсем недорогой, но высокостабильный и, одновременно, высокочастотный генератор функциональных сигналов, то обратите внимание в сторону готовых модулей CJMCU-5351 на базе генератора Si5351/Si5351A. Представляет собой отдельный модуль для подключения к контроллеру по шине I2C, в зависимости от сигнала устанавливается выход. Тактовая частота микросхемы составляет 25 МГц, но в модуле предусмотрены умножители и делители частоты, реальный сигнал модно получить аж до 160 МГц. Минимальный — от 8 кГц. Подойдет и для Arduino, и для STM32, и для других отладочных плат. Модуль под пайку, в комплекте есть стандартная гребенка с шагом 2.54 мм. Выход ВЧ сделан с разъемами SMA-типа. Это самый бюджетный вариант такого плана.

Простой генератор сигналов на XR2206
Наверное, это самый недорогой генератор сигналов с возможностью получить синус/треугольник/квадратный на выходе. Продается в виде комплекта, который нужно будет собрать. В составе есть акриловый корпус и все необходимое. Микросхема XR2206 дает возможность генерировать тестовый сигнал в пределах 1 Гц-1 МГц. Можно регулировать выходную амплитуду в нужных пределах.

Модуль-генератор ШИМ-сигналов (под пайку)
Удобный и недорогой вариант модуля-генератора импульсных сигналов, аналог такого же, что был в начале подборке. Представляет собой отдельный модуль без корпуса, со встроенным дисплеем и генератор сигналов PWM или импульсным сигналов. Можно устанавливать частоту импульсов, период повторения и скважность импульсов. Рабочий диапазон от 1Hz до 150Khz, пределы выходного напряжения от 3,3 V до 30 V.

Специальный модуль с тестовыми сигналами для VGA мониторов. Представляет собой небольшую плату со специализированой микросхемой. Питается от 7 V до 12 V (работает от любых блоков питания или батарейки типа «Крона» 9 V). Удобно для тестирования ЖК-дисплеев в ремонте или при покупке. Выдает несколько стандартных картинок для проверки матрицы.

DDS генератор сигналов на базе AD9833
Еще один недорогой модуль DDS генератора сигналов на основе AD9833. На этот раз характеристики чуть попроще, цена ниже. Также работает с микроконтроллерами Arduino и STM32. Удобный и недорогой способ собрать дома генератор сигналов с синусоидальным, прямоугольным, треугольным сигналом на выходе. Выход ВЧ сделан с разъемами SMA-типа.

УНИВЕРСАЛЬНЫЙ ГЕНЕРАТОР-ПРИЕМНИК SDR HACKRF
Одна из самых лучших плат-генераторов HackRF с софтовым приемником (SDR). Может не просто принимать любой сигнал в диапазоне от 1 МГц до 6 ГГц, но и генерировать сигнал на антенну. Можно использовать в радиолюбительских целях, для исследований, для студенческого или кандидатского проекта. Фактически, это популярные RTL-SDR, но с расширенным диапазоном и возможностью передачи сигнала. По ссылке несколько вариантов комплектации, это один из самых доступных лотов на Алиэкспресс.












Печатная плата
Все элементы, кроме резистора R3, предназначены для поверхностного монтажа и располагаются на плате с минимальным размером. R3 расположен на обратной стороне платы. Генераторные схемы очень капризны с точки зрения трассировки печатных плат. Если изменить топологию платы нельзя гарантировать ее работоспособность. Первая версия платы генерировала пилообразное напряжение с очень низкой амплитудой и ее было невозможно использовать.
Плата генератора ШИМ-сигнала
Сравнение с ШИМ на NE555
Прямоугольный сигнал конечно может быть получен с использованием популярнейшей микросхемы NE555, плюс два выпрямительных диода, несколько резисторов и конденсаторов. Это естественно гораздо более дешевое решение. И не нужно ничего программировать.
![]()
Но разница в том, что генератор 555 является аналоговым, и вы никогда не знаете точно, какое именно значение скважности установили в данный момент времени. Он также не позволяет точно установить уровень скважности с разрешением 1%.
Аналоговые и цифровые схемы — это два разных мира. У каждого из них есть свои плюсы и минусы, но факты таковы, что цифровой контроль сегодня есть практически везде и за ним будущее схемотехники.
В случае AtTiny программирование может быть выполнено по i2s, последовательно с пульта дистанционного управления или с использованием энкодера. Единственное, что нужно добавить, это дополнительный код. С таймером 555 таких возможностей не будет. Прилагаемый архив содержит схему в Eagle, плату в DipTrace, исходный текст программы и документацию в PDF.
Управление сервоприводом SG90 без микроконтроллера

Попался под руку популярный недорогой сервопривод SG90. И задумалось управлять им, но без микроконтроллера. В этой статье я изложу ход мыслей разработчика при реализации одного из вариантов решения.
Кому интересно, прошу под кат.
Надо управлять сервоприводом, но без микроконтроллера.
Знания
Всем известно, что опыт и знания помогают творить и находить решения. На страницах Гиктаймса немало примеров использования сервопривода с применением контроллеров. В них подробно рассказано про систему управления сервоприводом. Примем этот опыт других разработчиков за знания необходимые нам для решения задачи. Сервопривод SG90 управляется ШИМ сигналом, параметры которого определяют положение ротора. Период ШИМ около 20 мС, длительность сигнала управления от 500 до 2100 мкС.
Задача
Идея и знания порождают задачу, которую необходимо решить. Сформулируем задачу для воплощения идеи. Это что-то вроде Технического Задания. Кажется, все просто, надо взять генератор импульсов с изменяемой скважностью, подключить питание к сервоприводу, а с генератора подать управляющий сигнал. Особо отметим, что в требованиях есть изменения скважности — то есть должны быть органы управления или пользовательский интерфейс.
Базовая комплектация
цифровых генераторов ZET 7060-G

В базовый комплект поставки генераторов входит:
- цифровой генератор ZET 7060-G;
- панель установочная на DIN рейку для пластиковых модулей 71×39;
- комплект эксплуатационной документации.
Цифровые генераторы соответствуют требованиям Директивы 2011/65/EU (ROHS, ROHS II) об ограничении использования опасных веществ (Pb, Hg, Cd, Cr(VI)) в электрическом и электронном оборудовании и изготавливаются по бессвинцовой технологии, в соответствии с требованиями Европейского Сообщества
Контроллер ШИМ своими руками

- Что такое ШИМ?
- Принцип работы ШИМ
- Откуда берётся ШИМ
- Вариант 1 — аналоговый
- Вариант 2 – цифровой
- Как подключить к нагрузке
- Если нужно управлять плюсовым контактом
- Контроллер ШИМ для RGB светодиодной ленты
- Ключи на мосфет-транзисторах
Сегодня разберёмся что такое ШИМ и с чем его едят, а также как сделать контроллер в домашних условиях.
Мощный лабораторный генератор импульсов

Схема 1
Генератор был спроектирован для использования в нем минимального количества общедоступных электронных компонентов, с хорошей повторяемостью и достаточной надежностью. Вариант генератора (схема 1) собран на базе широко распространенного шим-контроллера UC3525 (U1), который управляет мостовой схемой на полевых транзисторах Q4-Q7. Если нижние ключи каждого из полумостов, работающих в противофазе, управляются непосредственно выходами микросхемы 11/14 U2, то в качестве драйверов верхнего плеча применены бустрепные каскады на транзисторах Q2, Q3. Такие каскады широко используются в большинстве современных микросхемных драйверов и достаточно хорошо описаны в литературе, посвященной силовой электронике. Входное напряжение переменное или постоянное (
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Принцип ШИМ – широтно-импульсная модуляция заключается в изменении ширины импульса при постоянстве частоты следования импульса. Амплитуда импульсов при этом неизменна.
Широтно-импульсное регулирование находит применение там, где требуется регулировать подаваемую к нагрузке мощность. Например, в схемах управления электродвигателями постоянного тока, в импульсных преобразователях, для регулирования яркости светодиодных светильников, экранов ЖК-мониторов, дисплеев в смартфонах и планшетах и т.п.
Большинство вторичных источников питания электронных устройств в настоящее время строятся на основе импульсных преобразователей, применяется широтно-импульсная модуляция и в усилителях низкой (звуковой) частоты класса D, сварочных аппаратах, устройствах зарядки автомобильных аккумуляторов, инверторах и пр. ШИМ позволяет повысить коэффициент полезного действия (КПД) вторичных источников питания в сравнении с низким КПД аналоговых устройств.
Широтно-импульсная модуляция бывает аналоговой и цифровой.
Аналоговая широтно-импульсная модуляция
Как уже упоминалось выше, частота сигнала и его амплитуда при ШИМ всегда постоянны. Один из важнейших параметров сигнала ШИМ – это коэффициент заполнения, равный отношению длительности импульса t к периоду импульса T. D = t/T. Так, если имеем сигнал ШИМ с длительностью импульса 300 мкс и периодом импульса 1000 мкс, коэффициент заполнения составит 300/1000 = 0,3. Коэффициент заполнения также выражается в процентах, для чего коэффициент заполнения умножается на 100%. По примеру выше процентный коэффициент заполнения составляет 0,3 х 100% = 30%.
![]()
Скважность импульса – это отношение периода импульсов к их длительности, т.е. величина, обратная коэффициенту заполнения. S = T/t.
Частота сигнала определяется как величина, обратная периоду импульса, и представляет собой количество полных импульсов за 1 секунду. Для примера выше при периоде 1000 мкс = 0,001 с, частота составляет F = 1/0,001 – 1000 (Гц).
Смысл ШИМ заключается в регулировании среднего значения напряжения путем изменения коэффициента заполнения. Среднее значение напряжения равно произведению коэффициента заполнения и амплитуды напряжения. Так, при коэффициенте заполнения 0,3 и амплитуде напряжения 12 В среднее значение напряжения составит 0,3 х 12 = 3,6 (В). При изменении коэффициента заполнения в теоретически возможных пределах от 0% до 100% напряжение будет изменяться от 0 до 12 В, т.е. Широтно-импульсная модуляция позволяет регулировать напряжение в пределах от 0 до амплитуды сигнала. Что и используется для регулирования скорости вращения электродвигателя постоянного тока или яркости свечения светильника.
Сигнал ШИМ формируется микроконтроллером или аналоговой схемой. Этот сигнал обычно управляет мощной нагрузкой, подключаемой к источнику питания через ключевую схему на биполярном или полевом транзисторе. В ключевом режиме полупроводниковый прибор либо разомкнут, либо замкнут, промежуточное состояние исключается. В обоих случаях на ключе рассеивается ничтожная тепловая мощность. Поскольку эта мощность равна произведению тока через ключ на падение напряжения на нем, а в первом случае к нулю близок ток через ключ, а во втором напряжение.
В переходных состояниях на ключе присутствует значительное напряжение с прохождением значительного тока, т.е. значительна и рассеиваемая тепловая мощность. Поэтому в качестве ключа необходимо применение малоинерционных полупроводниковых приборов с быстрым временем переключения, порядка десятков наносекунд.
Если ключевая схема управляет светодиодом, то при малой частоте сигнала светодиод будет мигать в такт с изменением напряжения сигнала ШИМ. При частоте сигнала выше 50 Гц мигания сливаются вследствие инерции человеческого зрения. Общая яркость свечения светодиода начинает зависеть от коэффициента заполнения – чем ниже коэффициент заполнения, тем слабее светится светодиод.
При управлении посредством ШИМ скорости вращения двигателя постоянного тока частота ШИМ должна быть очень высокой, и лежать за пределами слышимых звуковых частот, т.е. превышать 15-20 кГц, в противном случае двигатель будет «звучать», издавая раздражающий слух писк с частотой ШИМ. От частоты зависит и стабильность работы двигателя. Низкочастотный сигнал ШИМ с невысоким коэффициентом заполнения приведет к нестабильной работе двигателя и даже возможной его остановке.
Тем самым, при управлении двигателем желательно повышать частоту сигнала ШИМ, но и здесь существует предел, определяемый инерционными свойствами полупроводникового ключа. Если ключ будет переключаться с запаздываниями, схема управления начнет работать с ошибками. Чтобы избежать потерь энергии и добиться высокого коэффициента полезного действия импульсного преобразователя, полупроводниковый ключ должен обладать высоким быстродействием и низким сопротивлением проводимости.
Сигнал с выхода ШИМ можно также усреднять посредством простейшего фильтра низких частот. Иногда можно обойтись и без этого, поскольку электродвигатель обладает определенной электрической индуктивностью и механической инерцией. Сглаживание сигналов ШИМ происходит естественным путем в том случае, когда частота ШИМ превосходит время реакции регулируемого устройства.
Реализовать ШИМ можно посредством компаратора с двумя входами, на один из которых подается периодический пилообразный или треугольный сигнал от вспомогательного генератора, а на другой модулирующий сигнал управления. Длительность положительной части импульса ШИМ определяется временем, в течение которого уровень управляющего сигнала, подаваемого на один вход компаратора, превышает уровень сигнала вспомогательного генератора, подаваемого на другой вход компаратора.
Принципиальная схема ШИМ генератора XY-PWM
![]()
Теперь становится ясно, что каждый транзистор работает как «буфер», который инвертирует фактический сигнал импульсного выхода микроконтроллера. С резистором нагрузки коллектора 620 Ом можно ожидать выходного сигнала с широтно-импульсной модуляцией уровня 5 В, который может управлять внешней нагрузкой с 8 мА максимального тока на канал.
![]()
Для теста использовался USB-блок питания. Сначала установили оба канала ШИМ на 25 кГц (50%) и наблюдали за выходным сигналом на осциллографе.
![]()
Канал осциллографа 1 (желтый) на PWM1, а канал осциллографа 2 (синий) — на базу Q1 (то есть первый вывод импульсного выхода микроконтроллера).
Возвращаясь к двухканальным сигналам ШИМ заметим, что такое дело будет полезно во многих случаях, таких как управление шаговыми двигателями, управление бесколлекторными двигателями постоянного тока, преобразование постоянного напряжения. Поскольку модуль XY-PWM можно использовать для генерации двух сигналов ШИМ с одинаковой (но переменной) частотой и рабочим циклом, результирующие прямоугольные волны с двухфазным смещением могут сыграть важную роль в чередующихся / фазосдвинутых сигналов.
Согласно описанию, двухканальный ШИМ-модуль даже совместим с серией промышленных двухфазных гибридных шаговых сервоприводов RMCS-111x.
Кстати, разъем встроенного 4-контактного интерфейса напоминает знакомый интерфейс программатора SWIM для микроконтроллеров STM. Чаще всего STM8S003K составляет основу такого двухканального модуля ШИМ.
![]()
Другое испытание проводилось с небольшим вентилятором BLDC на 12 В / 100 мА, просто подключили его к каналу PWM1 (25 кГц) двойного модуля PWM (с питанием от БП) через один модуль МОП IRF530 (не логика), как показано на схеме подключения. Использовали обычный метод «фиксированной частоты и переменного рабочего цикла» для управления скоростью вентилятора, и установка показала отличную производительность.
![]()
Вот выходной сигнал ШИМ 20 кГц (50%) (x2), обработанный двухканальным модулем ШИМ и снятый USB-осциллографом.
![]()
Выходное напряжение ШИМ модуля находится на уровне 5 В, потому что транзисторы драйвера питаются от встроенного стабилизатора напряжения 5 В / 30 мА LDO. И простое вырезание одной дорожки сделает ее готовой к выходам ШИМ более высокого уровня.
![]()
После этого можно подать более высокое напряжение между контактными площадками V + и GND. Если это вход 12 В, то получим выходы ШИМ с уровнем 12 В, но убедитесь что есть 100% изоляция между V + и дорожкой 5 В, иначе схема может сгореть. В общем подобный блок прекрасная основа более сложных приборов и электрических исполнительных механизмов.
Микроконтроллеры с ПНЯ
Рассмотрим состав периферии 8-и битных микроконтроллеров Microchip, предназначенных для построения преобразователей энергии.

Рис. 3. Периферия контроллеров серии PIC16F1769 Контроллеры серии PIC16F176x (см. рис.3) имеют набор периферийных модулей достаточных для реализации многоканальных ШИМ контроллеров импульсного источника питания:
- быстрые компараторы;
- операционные усилители;
- формирователь комплементарных сигналов (COG);
- программируемый формирователь пилообразного напряжения (PRG);
- источник опорного напряжения;
- ЦАП;
- АЦП;
- детектор перехода через ноль (ZCD);
- таймеры с функцией сброса и ограничения, ШИМ;
- модулятор сигналов;
- Конфигурируемые Логические Ячейки (CLC);
- датчик температуры.
Периферийные модули могут соединяться внутри микроконтроллера для выполнения определенных функций. Например, рис.4 иллюстрирует конфигурирование периферии для выполнения функции преобразователя энергии. Причем подобное конфигурированные взаимосвязи периферийных модулей не требуют вмешательства ядра в процессе работы устройства.

Рис. 4. Повышающий преобразователь питания светодиодов со стабилизацией тока и диммирования.
Таким образом, на одной микросхеме/микроконтроллере мы можем реализовать ядро импульсного источника питания и управляющую логику (программу), тем самым мы получаем возможность исключить из схемы специализированный драйвер преобразователя питания. Рассмотрим подробнее различные режимы работы ШИМ-контроллеров и возможность реализации их на периферии микроконтроллеров Microchip.
Генератор с регулируемой частотой и скважностью
. Применить данный регулируемый генератор импульсов возможно при самых различных видах работ по настройке узлов и схем электронной аппаратуры. Проверка схем импульсных источников питания, оценка параметров УНЧ при прохождении прямоугольного сигнала, цифровые схемы. Возможно настраивать электронные музыкальные инструменты, точно задавая частоту нот. Частота задаётся с точностью до 4-х знаков.
Схема регулируемого генератора импульсов
Работа генератора
. В обычном режиме отображается либо частота, либо коэффициент, разряды при этом не мигают, коррекция отключена.
. Если отображена частота, то для отображения коэффициента нужно нажать одну из кнопок Кзап+ или Кзап-. Произойдёт переход к показаниям коэффициента с выводом на пол/секунды подсказки “PULS”. . Если отображается коэффициент, то переход к отображению частоты произойдёт по нажатию одной из кнопок коррекции частоты Fosc+ или Fosc-.
Регулировка частоты выходного сигнала
Регулировка коэффициента заполнения импульсом
(скважности)
. Для коррекции коэффициента заполнения нажимаются кнопки Кзап+ Кзап- в режиме отображения коэффициента. При этом после вывода подсказки “PULS” два разряда коэффициента мигают с частотой 2 герца – доступна коррекция процента заполнения импульсного сигнала. . При нажатии кнопок Fosc+ Fosc- в режиме коррекции коэффициента происходит переход к отображению текущей частоты.
. Если в режиме коррекции ни одна из кнопок не нажимается дольше 10 секунд – происходит автоматический переход к режиму отображения корректируемых показаний – мигание отключается.
. При выставленной нулевой частоте (на индикаторе все нули) генератор отключен, на выходе RB3 выставлен низкий логический уровень.
. Изменение рабочей частоты на выходе прибора во время коррекции происходит после отпускания кнопки. На время пересчёта и смены частоты выходной сигнал обнуляется (примерно на 1 миллисекунду).
. Прошивку микроконтроллера для данной схемы можно приобрести у автора, при условии, что Вы обязуетесь не распространять её через интернет и не передавать кому-либо ещё. Стоимость прошивки 350 рублей. Оплата через Яндекс-деньги.
Автор конструкции Виталий Антонов Челябинск Email указан на схеме
Генерируем ШИМ на микроконтроллере STM32F100 для полумостового преобразователя напряжения.

Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью, подводимой к нагрузке, путём изменения скважности импульсов, при постоянной частоте
В микроконтроллерах stm ШИМ можно генерировать несколькими способами. Один из них программный — подача нуля и единицы на логический вывод в нужное время, и аппаратный — используя один из таймеров контроллера.
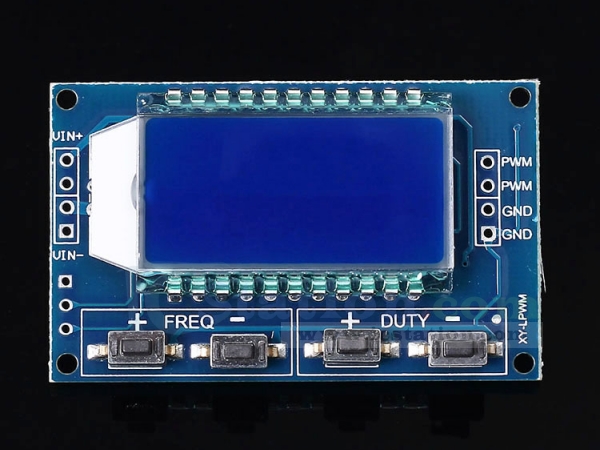
ШИМ генератор с ЖК-индикатором
На дисплей можно вывести только 2 числа по 3 цифры в каждом. В нижней строке отображается скважность ШИМ в процентах, а в верхней – частота. Частота выводится на дисплей по следующим правилам:
- XXX, шаг в 1Гц, в диапазоне 1 – 999Гц;
- X.XX, шаг в 0.01кГц, в диапазоне 1.00 — 9.99кГц;
- XX.X, шаг в 0.1кГц; в диапазоне 10.0 — 99.9кГц;
- X.X.X, шаг в 1 кГц; в диапазоне 100 — 150 кГц.
Дисплей управляется микросхемой HT1621B, дисплей универсальный, на нем имеются символы, необходимые для построения термометра, гигрометра, вольтметра, амперметра и ваттметра, но в нашем случае они не используются. Дисплей имеет яркую синюю подсветку. К слову, замечу, что дисплей на моем генераторе оказался потертым, будто его откуда-то сняли.
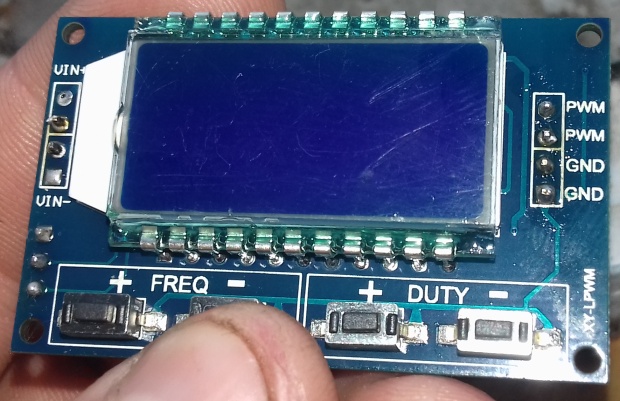
Главной микросхемой генератора является микроконтроллер STM8S003F3P6. И поскольку этот микроконтроллер имеет EEPROM память, то настройки сохраняются при выключении.
Управлять генератором можно двумя способами: кнопками и по UART. С кнопками всё ясно, одна пара кнопок управляет частотой, вторая скважностью. А вот с UART всё намного интереснее. Обмен данными должен происходить со следующими параметрами:
- 9600 bps Data bits: 8
- Stop bit: 1
- Check digit: none
- Flow control: none
Для того, чтобы установить частоту генерации, необходимо отправить частоту так, как она отображается на дисплее прибавив перед значением частоты букву F. Например, для установки частоты в 100 Гц необходимо отправить F100, для 105 кГц — F1.0.5, для 10.5 кГц — F10.5 и так далее.
Для установки скважности необходимо отправить трехзначное число скважности добавив перед ним букву D . Например, D050, D100, D001.
Что бы прочитать установленные параметры, необходимо отправить слово «read».
Если отправлена верная команда, то генератор ответит DOWN, если ошибочная – FALL. Но есть одно НО, я так и не смог настроить работу с генератором через UART.
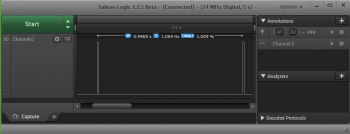
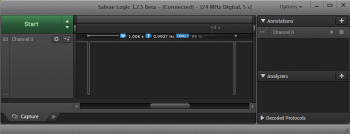
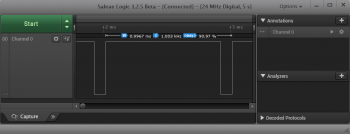
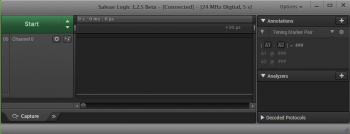
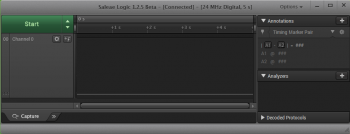
Я решил проверить генератор при помощи логического анализатора. Вот что получилось.
Частота 1 Гц, скважность 1%. Как видим погрешность пока небольшая.
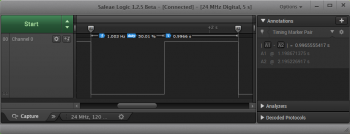
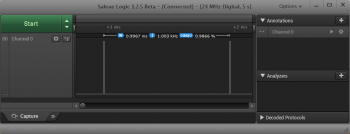
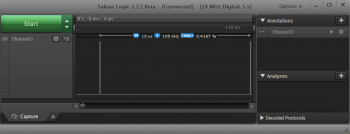
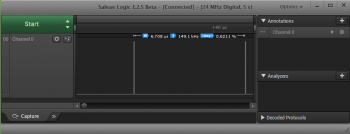
Частота 1 Гц, скважность 50%.
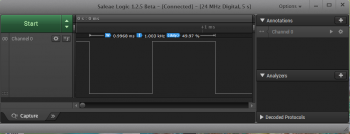
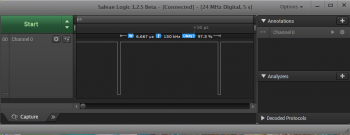
Частота 1 Гц, скважность 99%.
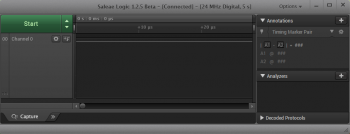
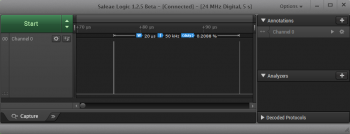
Частота 1 кГц, скважность 1%.
Частота 1 кГц, скважность 50%.
Частота 1 кГц, скважность 99%. Тут мы видим, что при установленных 99% скважности на самом деле заполнение составляет 100%.
Частота 1 кГц, скважность 91%. Я начал снижать скважность, и вплоть до 92% заполнение составляло 100%, и только при 91% ситуация исправляется.
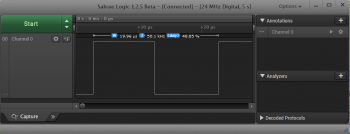
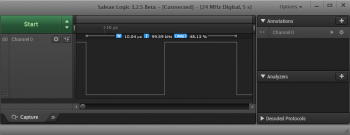
Частота 50 кГц, скважность 1%. Как видим что тут всего 0,2% вместо 1%.
Частота 50 кГц, скважность 50%. Здесь отличается на 1%.
Частота 50 кГц, скважность 99%. И тут снова отклонение -1%.
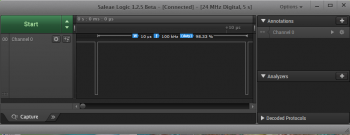
Частота 100 кГц, скважность 1%. А вот тут ещё ничего нет.
Частота 100 кГц, скважность 2%. А при 2% сигнал появляется, но на самом деле заполнение 0,4%.
Частота 100 кГц, скважность 50%. Отклонение почти -2%.
Частота 100 кГц, скважность 99%. И тут почти -1%.
Частота 150 кГц, скважность 1%. Снова нет сигнала.
Частота 150 Гц, скважность 3%. И появляется сигнал только при 3%, но заполнение составляет 0,6%.
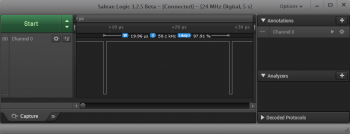
Частота 150 кГц, скважность 50%. Но на самом деле заполнение 46,5%, на -3,5% уже отличие.
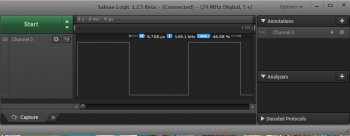
Частота 150 кГц, скважность 99%. И тут погрешность, но всего 1,5%.
Выборка достаточно грубая, но на этом исследования не закончены. Я решил измерить скважность при различном заполнении (шаг 5%) и на различных частотах (шаг 25000 Гц) и занести их в таблицу.
Верхняя строка содержит частоту, я выбрал шаг в 25 кГц, левый столбец – установленная скважность, в остальных ячейках замеренная скважность.
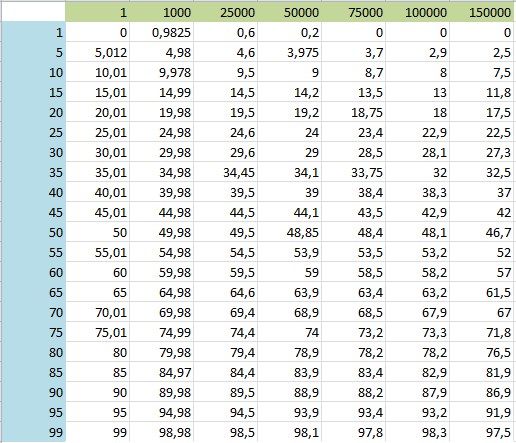
В этой таблице указана разница в установленной и замеренной скважности.
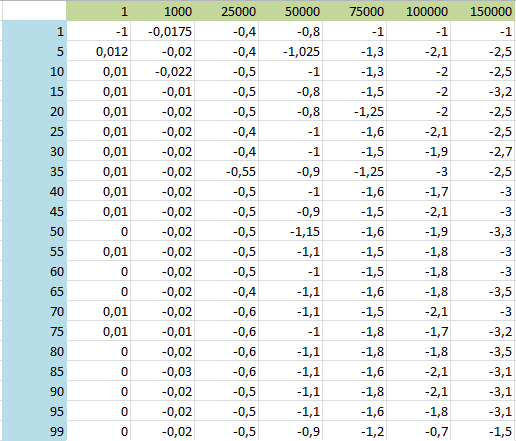
Чем выше частота, тем больше отклонение между установленной и замеренной скважностями. Так же замеренная скважность всегда ниже установленной, но строгой закономерности в отклонении не наблюдается.
Так же я проверил соответствие установленной и замеренной частоты. Результат так же занес в таблицу.

Заявленная точность в 2% от установленной частоты соблюдается.
В итоге, если вам необходимо установить точные значения генерации, то проверяйте установленные параметры перед использованием генератора. Если же необходимо просто управлять яркостью светодиода или скоростью вращения двигателя, то этот генератор без проблем подойдет для этих задач.
 mefi73
mefi73  Опубликована: 03.01.2018
Опубликована: 03.01.2018  0
0  0
0
 Вознаградить Я собрал 0 0
Вознаградить Я собрал 0 0
PWM Generator (Three-phase, Two-level)
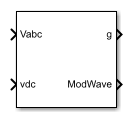
Блок PWM Generator (Three-phase, Two-level) управляет поведением переключения для трехфазного двухуровневого преобразователя степени. Блок:
Вычисляет время включения и выключения на основе блока входов:
Три синусоидальных опорных напряжения, по одному на фазу
Постоянное напряжение канала
Использует время управления ключом, чтобы сгенерировать шесть импульсов управления ключом.
Использует время стробирования, чтобы сгенерировать формы волны модуляции.
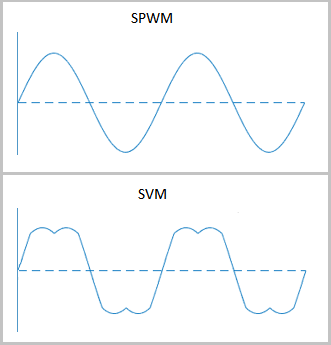
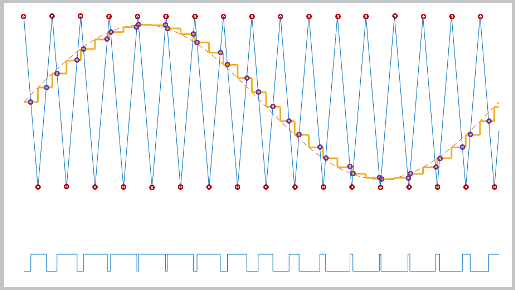
Непрерывный и прерывистый ШИМ
Блок обеспечивает режимы как непрерывной, так и прерывистой модуляции ширины импульса (PWM). Рисунок показывает общее различие между непрерывными синусоидальными формами PWM (SPWM) и непрерывной векторной модуляцией (SVM).
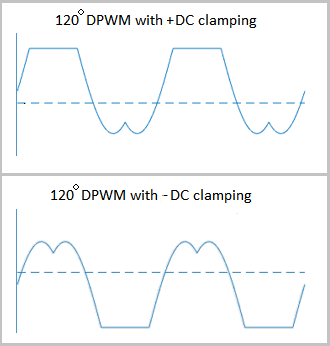
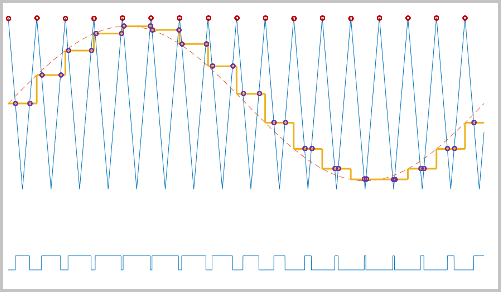
Для прерывистого ШИМ (DPWM) блок зажимает волну модуляции к положительному или отрицательному рельсу постоянного тока в общей сложности на 120 степени в течение каждого основного периода. Во время интервалов зажима модуляция прекращается.
Форма волны с 30-градусным DPWM имеет четыре 30-градусных интервала на основной период.
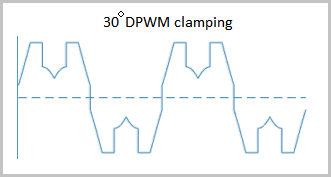
Выбор положительного или отрицательного сдвига фазы на 30 градусов влияет на интервалы зажима для DPWM на 60 градусов.
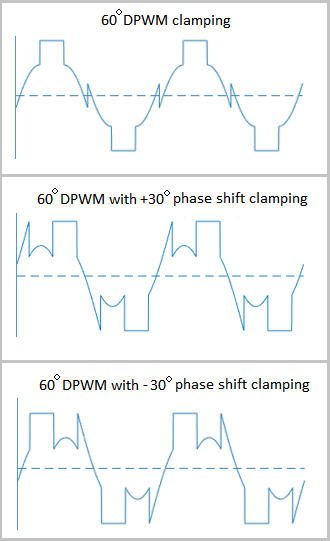
Рисунок показывает формы волны для положительного и отрицательного зажима постоянного тока для 120-градусного DPWM.
Режим дискретизации
Этот блок позволяет вам выбрать естественную, симметричную или асимметричную дискретизацию волны модуляции.
Блок PWM Generator (Three-phase, Two-level) не выполняет ШИМ на основе несущей. Вместо этого блок использует входные сигналы, чтобы вычислить время стробирования, а затем использует время стробирования, чтобы сгенерировать как импульсы управления переключателем, так и формы модуляции, которые он выводит.
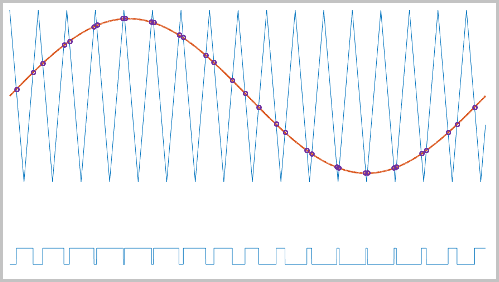
Основанный на несущей ШИМ, однако, полезен для демонстрации того, как выбранный вами режим дискретизации относится к поведению включения и выключения импульсов, которые генерирует блок. Генератор, который использует двухуровневый метод PWM на основе несущей:
Дискретизирует ссылку волну.
Сравнивает выборку с треугольной несущей волной.
Генерирует импульс включения, если выборка выше, чем сигнал несущей, или импульс выключения, если выборка ниже, чем несущая волна.
Чтобы определить поведение импульсов включения и выключения, двухуровневый генератор PWM на основе несущей использует эти методы, чтобы дискретизировать треугольную волну:
Естественно — дискретизация и сравнение происходят в точках пересечения волны модуляции и волны несущей.
Асимметричная — Дискретизация происходит на верхних и нижних контурах несущей волны. Сравнение происходит на пересечении, которое следует за выбором.
Симметричная — Дискретизация происходит только на верхнем контуре несущей волны. Сравнение происходит на пересечении, которое следует за выбором.
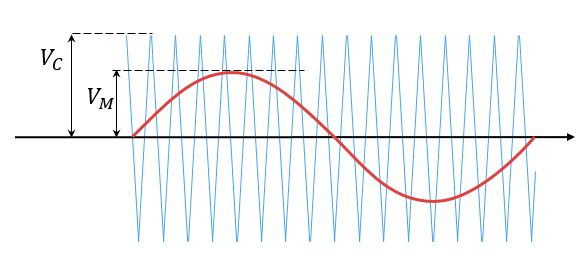
Сверхмодуляция
Индекс модуляции, который измеряет способность преобразователя степени выдавать заданное напряжение, задан как
m — индекс модуляции.
Vm — пиковое значение волны модуляции.
Vc — пиковое значение несущей волны треугольника.
Для трехфазного SPWM,
V p e a k = m v d c 2 ,
Vpeak — пиковое значение основного компонента напряжения «фаза-нейтраль».
vdc — напряжение постоянного тока.
Для трехфазного вектора пространства PWM (SVM) и DPWM,
V p e a k = m v d c 3 .
Для нормальной установившейся операции, 0 <<reservedrangesplaceholder1> ≤ <reservedrangesplaceholder0> . Если переходный процесс, такой как увеличение нагрузки, заставляет амплитуду Vm превышать амплитуду Vc, избыточной модуляции (m > 1 ) происходит.
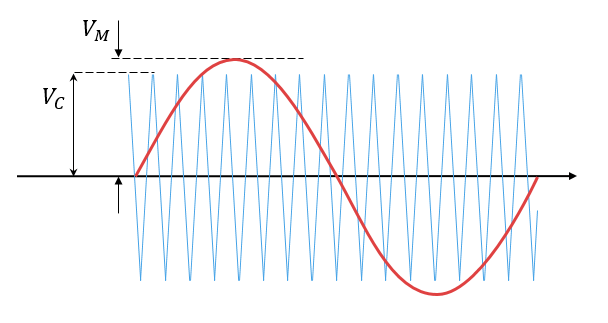
Если происходит перенапряжение, выходное напряжение преобразователя степени зажимается к положительной или отрицательной рейке постоянного тока.
В примере трехфазного двухуровневого PWM-генератора Two-Level Controller подсистема содержит 400-V вход DC-канала и индекс модуляции, m, 0,8. Для SPWM максимальное входное напряжение составляет 400 V/2, то есть 200 В. Чтобы продемонстрировать избыточную модуляцию, в начале симуляции добавляется переходный процесс. Переходный процесс заставляет амплитуды опорных напряжений превышать амплитуду 1/2 напряжения постоянного тока. Чтобы выделить избыточную модуляцию, возможности включают результаты симуляции только для одного из шести выходных импульсов и только a-фазы опорных напряжений, форм волны модуляции и выходных напряжений.
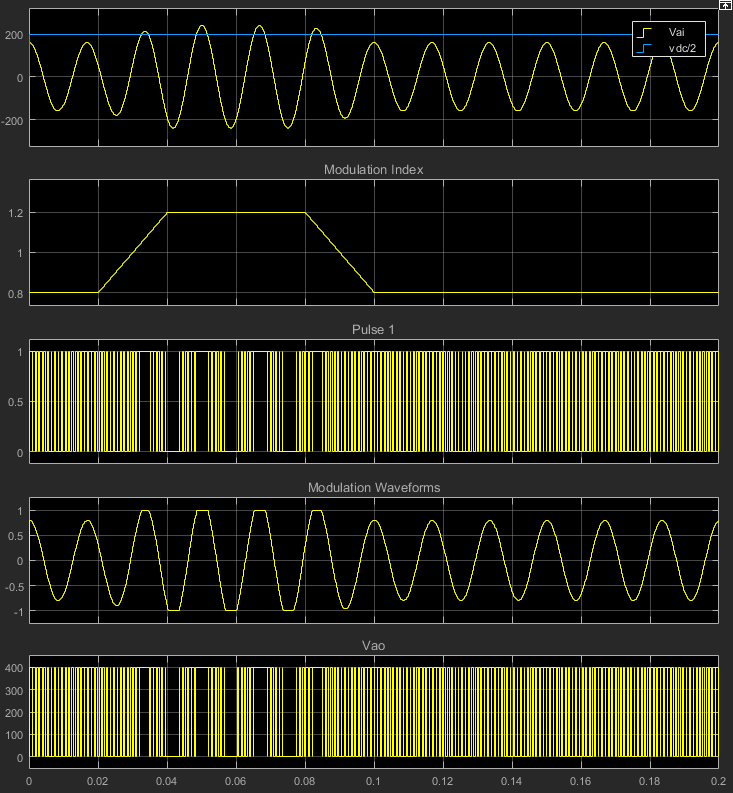
Индекс модуляции больше единицы между 0,03-0,09 секундами. Во время избыточной модуляции:
Импульс остается в положении включения или выключения.
Напряжение выхода, Vao, зажимы к положительному или отрицательному рельсу постоянного тока.
Порты
Vabc — Трехфазный синусоидальный сигнал уставки
вектор
Задайте три синусоидальных напряжения, по одному на фазу, которые вы хотите, чтобы подключенный преобразователь выходил.
vdc — сигнал напряжения постоянного тока
скаляр
Задайте положительное действительное число для напряжения постоянного тока конвертера.
Выход
g — Управление ключами
вектор
Шесть импульсных сигналов, которые определяют поведение переключения в подключенном преобразователе степени.
ModWave — Волна модуляции
вектор
Если вы генерируете код для платформы, которая имеет оборудование с возможностями PWM, можно развернуть волну модуляции на оборудовании. В противном случае эти данные предназначены только для вашей ссылки.
Параметры
PWM mode — Метод модуляции ширины импульса
Continuous PWM (CPWM) (по умолчанию) | Discontinuous PWM (DPWM)
Прерывистый ШИМ зажимает форму волны к рельсу постоянного тока в общей сложности на 120 степени в каждом основном периоде. Непрерывный ШИМ не делает.
Continuous PWM — Непрерывный метод модуляции ширины импульса
SPWM: sinusoidal PWM (по умолчанию) | SVM: space vector modulation
Зависимости
Параметр Continuous PWM доступен только, когда вы задаете параметр PWM mode равным Continuous PWM (CPWM) .
Sampling mode — Метод волновой выборки
Natural (по умолчанию) | Asymmetric | Symmetric
Режим дискретизации определяет, дискретизирует ли блок форму волны модуляции, когда волны пересекаются или когда несущая волна находится в одном или обоих своих граничных условиях.
Switching frequency (Hz) — Скорость переключения
1e3 (по умолчанию) | положительное число
Укажите скорость переключения переключателей в преобразователе степени.
Sample time (s) — Блокируйте шаг расчета
5e-5 (по умолчанию) | положительное число
Задайте временной интервал между последовательными выполнениями блоков (выходные вычисления). Чтобы гарантировать адекватное разрешение в сгенерированном сигнале, установите это значение меньше или равным 1/(50*Fsw) , где F sw — Switching frequency (Hz).
Discontinuous PWM (DPWM) — Метод зажима
60 DPWM: 60 degree discontinuous PWM (по умолчанию)
Задайте метод распределения 120 степеней за период, в течение которого блок зажимает волну модуляции к рельсу постоянного тока. Другие опции:
60 DPWM (+30 degree shift): +30 degree shift from 60 DPWM
60 DPWM (-30 degree shift): -30 degree shift from 60 DPWM
30 DPWM: 30 degree discontinuous PWM
120 DPWM: positive dc component
120 DPWM: negative dc component
Когда волна зажата, модуляция прекращается.
Зависимости
Параметр Discontinuous PWM доступен только, когда вы задаете параметр PWM mode равным Discontinuous PWM (DPWM) .
Примеры моделей

Скаляра асинхронной машины
Управляйте скоростью ротора в приводе асинхронной машины (ASM) с помощью скалярного метода управления V/f. Преобразователь преобразует задающую скорость в ссылку электрическую частоту. Контроллер генерирует ссылку напряжения от частоты ссылки путем поддержания постоянного отношения напряжения к частоте через управление скаляра V/f.

Электрический Engine Dyno
Моделируйте электрический тест транспортного средства динамометра. Тестовое окружение содержит асинхронную машину (ASM) и внутреннюю синхронную машину с постоянными магнитами (IPMSM), соединенную друг с другом через механический вал. Обе машины питаются от высоковольтных батарей через управляемые трехфазные преобразователи. АСМ мощностью 164 кВт создает крутящий момент нагрузки. 35 кВт IPMSM является тестируемой электрической машиной. Тестируемая машина управления (IPMSM) управляет крутящим моментом IPMSM. Контроллер включает в себя многоскоростную основанную на ПИ структуру управления. Скорость регулирования крутящего момента без разомкнутого контура медленнее, чем скорость управления током с обратной связью. Планирование задач для контроллера реализовано как конечный автомат Stateflow ®. Подсистема Control Load Machine (ASM) использует одну скорость для управления скоростью ASM. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Энергетический баланс в генераторе 48V Starter
Синхронная машина с внутренними постоянными магнитами (IPMSM), используемая в качестве стартера/генератора в упрощенной 48V автомобильной системе. Система содержит 48V электрическую сеть и 12V электрическую сеть. Двигатель внутреннего сгорания (ДВС) представлен основными механическими блоками. IPMSM работает как двигатель до тех пор, пока ICE не достигнет скорости холостого хода, а затем работает как генератор. IPMSM подает степень на 48V сеть, которая содержит R3 потребителя степени. Сеть 48V обеспечивает степень 12V сети, которая имеет двух потребителей: R1 и R2. Общее время симуляции (t) составляет 0,5 секунды. На t = 0,05 секунде включается ICE. На t = 0,1 секунде R3 включается. На t = 0,3 секунде R2 включается и увеличивает нагрузку на 12V электрическую сеть. EM Контроллера подсистема включает в себя многоскоростной PI- структуры каскадного регулирования, который имеет внешний контур управления напряжением и два внутренних контура управления током. Планирование задач в Подсистеме управления реализовано как конечный автомат Stateflow ®. Подсистема Контроллера DCDC реализует простое ПИ-контроллер для Понижающего конвертера DC-DC, которая питает 12V сеть. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление крутящим моментом HESM
Управляйте крутящим моментом в тяговом приводе с синхронной машиной гибридного возбуждения (HESM). Постоянные магниты и обмотка возбуждения возбуждают HESM. Высоковольтная батарея подает SM через управляемый трехфазный преобразователь для обмоток статора и через управляемый четырехквадрантный измельчитель для обмотки ротора. Идеальный источник скорости вращения обеспечивает нагрузку. Подсистема управления использует разомкнутый подход для управления крутящим моментом и замкнутый подход для управления током. В каждый момент выборки запрос крутящего момента преобразуется в соответствующие ссылки на токи. Текущее управление основано на ПИ. В симуляции используется несколько шагов крутящего момента как в режиме двигателя, так и в режиме генератора. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление скоростью HESM
Управляйте скоростью вращения ротора в тяговом приводе с синхронной машиной гибридного возбуждения (HESM). Постоянные магниты и обмотка возбуждения возбуждают HESM. Высоковольтная батарея питает HESM через управляемый трехфазный преобразователь для обмоток статора и через управляемый четырехквадрантный измельчитель для обмотки ротора. Идеальный источник крутящего момента обеспечивает нагрузку. Подсистема управления включает многоскоростную основанную на ПИ структуру каскадного регулирования. Структура управления имеет внешний цикл управления угловой скоростью и три внутренних контура управления током. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Стабилизация напряжения IPMSG
Управляйте системой генератора низкого напряжения для гибридного электрического транспортного средства (HEV) на базе синхронного генератора постоянных магнитов (IPMSG). Подсистема управления включает в себя многоскоростную основанную на ПИ структуру каскадного регулирования, которая имеет внешний контур управления напряжением и два внутренних контура управления током. Планирование задач в Подсистеме управления реализовано как конечный автомат Stateflow ®. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции. Идеальный источник скорости вращения, который представляет двигатель внутреннего сгорания, управляет IPMSG. IPMSG подает низковольтную степень на нагрузки R1 и R2. На t = 0,4 секунде переключатель закрывается, увеличивая нагрузку.

Управление крутящим моментом IPMSM в параллельном HEV
Упрощённое параллельное гибридное электрическое транспортное средство (HEV). Синхронная машина с внутренними постоянными магнитами (IPMSM) и двигатель внутреннего сгорания (ICE) обеспечивают движение транспортного средства. IPMSM работает как в моторном, так и в генерирующем режимах. Коробка передач транспортного средства и дифференциал реализованы с помощью модели редукции с фиксированным отношением. Подсистема Контроллер преобразует входы драйвера в команды крутящего момента. Стратегия управления транспортным средством реализована как конечный автомат Stateflow ®. Подсистема Контроллер управляет крутящим моментом двигателя внутреннего сгорания. Подсистема контроллера привода управляет крутящим моментом IPMSM. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление крутящим моментом IPMSM в последовательном HEV
Синхронная машина с внутренними постоянными магнитами (IPMSM), двигающая гибридное электрическое транспортное средство (HEV) упрощенной серии. Идеальный преобразователь DCDC, подключенный к высоковольтной батарее, питает IPMSM через управляемый трехфазный преобразователь. Генератор, приводимый в действие двигателем внутреннего сгорания, заряжает высоковольтную батарею. Коробка передач транспортного средства и дифференциал реализованы с помощью модели редукции с фиксированным отношением. Подсистема контроллера транспортного средства преобразует входы драйвера в соответствующие команды для IPMSM и генератора. Подсистема контроллера привода управляет крутящим моментом IPMSM. Контроллер включает в себя многоскоростную основанную на ПИ структуру управления. Скорость регулирования крутящего момента без разомкнутого контура медленнее, чем скорость управления током с обратной связью. Планирование задач для контроллера реализовано как конечный автомат Stateflow ®. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление крутящим моментом IPMSM в последовательно-параллельном HEV
Упрощённое последовательно-параллельное гибридное электрическое транспортное средство (HEV). Синхронная машина с внутренними постоянными магнитами (IPMSM) и двигатель внутреннего сгорания (ICE) обеспечивают движение транспортного средства. ICE также использует электрогенератор, чтобы подзарядить высоковольтный аккумулятор во время вождения. Коробка передач транспортного средства и дифференциал реализованы с помощью модели редукции с фиксированным отношением. Подсистема Контроллер преобразует входы драйвера в команды крутящего момента. Стратегия управления транспортным средством реализована как конечный автомат Stateflow ®. Подсистема Контроллер управляет крутящим моментом двигателя внутреннего сгорания. Подсистема Контроллера Генератора управляет крутящим моментом электрогенератора. Подсистема контроллера привода управляет крутящим моментом IPMSM. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление крутящим моментом IPMSM в осевом приводе HEV
Синхронная машина с внутренними постоянными магнитами (IPMSM), двигающая упрощенный электропривод с транспортным средством. Высоковольтная батарея питает IPMSM через управляемый трехфазный преобразователь. IPMSM работает как в моторном, так и в генерирующем режимах. Коробка передач транспортного средства и дифференциал реализованы с помощью модели редукции с фиксированным отношением. Подсистема Контроллера Транспортного средства преобразует входы драйвера в соответствующую команду крутящего момента. Подсистема контроллера привода управляет крутящим моментом IPMSM. Контроллер включает в себя многоскоростную основанную на ПИ структуру управления. Скорость регулирования крутящего момента без разомкнутого контура медленнее, чем скорость управления током с обратной связью. Планирование задач для контроллера реализовано как конечный автомат Stateflow ®. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление скоростью IPMSM
Управление скоростью вращения ротора во внутреннем тяговом приводе с синхронной машиной на постоянных магнитах (IPMSM). Высоковольтная батарея питает IPMSM через управляемый трехфазный преобразователь. IPMSM работает как в моторном, так и в генерирующем режимах в соответствии с нагрузкой. Идеальный источник крутящего момента обеспечивает нагрузку. Подсистема Возможностей содержит возможности, которые позволяют вам видеть результаты симуляции. Подсистема управления включает в себя многоскоростную основанную на ПИ структуру каскадного регулирования, которая имеет внешний цикл управления угловой скоростью и двумя внутренними контурами управления током. Планирование задач в Подсистеме управления реализовано как конечный автомат Stateflow ®. Во время симуляции за одну секунду уставка по скорости вращения составляет 0 об/мин, 500 об/мин, 2000 об/мин и затем 3000 об/мин. Выше 1630 об/мин IPMSM входит в режим ослабления поля.

Управление крутящим моментом SM
Управляйте крутящим моментом в тяговом приводе с синхронной машиной (SM). Высоковольтная батарея подает SM через управляемый трехфазный преобразователь для обмоток статора и управляемый четырехквадрантный измельчитель для обмотки ротора. Идеальный источник скорости вращения обеспечивает нагрузку. Подсистема управления использует разомкнутый подход для управления крутящим моментом и замкнутый подход для управления током. В каждый момент выборки запрос крутящего момента преобразуется в соответствующие ссылки на токи. Текущее управление основано на ПИ. В симуляции используется несколько шагов крутящего момента как в режиме двигателя, так и в режиме генератора. Планирование задач реализовано как конечный автомат Stateflow ®. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление скоростью SM
Управляйте скоростью вращения ротора в тяговом приводе с синхронной машиной (SM). Высоковольтная батарея подает SM через управляемый трехфазный преобразователь для обмоток статора и управляемый четырехквадрантный измельчитель для обмотки ротора. Идеальный источник крутящего момента обеспечивает нагрузку. Подсистема управления включает в себя многоскоростную основанную на ПИ структуру каскадного регулирования, которая имеет внешний цикл управления угловой скоростью и тремя внутренними контурами управления током. Планирование задач в Подсистеме управления реализовано как конечный автомат Stateflow ®. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Управление скоростью синхронной реактивной машины
Управляйте скоростью вращения ротора в электроприводе на основе синхронной реактивной машины (SynRM). Высоковольтный аккумулятор питает SynRM через управляемый трехфазный преобразователь. Идеальный источник крутящего момента обеспечивает нагрузку. Подсистема управления включает многоскоростную основанную на ПИ структуру каскадного регулирования. Структура управления имеет внешний цикл управления угловой скоростью и два внутренних контура управления током. Подсистема визуализации содержит возможности, которые позволяют вам видеть результаты симуляции.

Трехфазный асинхронный привод с управлением датчиком
Управление и анализ операции асинхронной машины (ASM) с помощью векторного управления датчиком ротора. Модель показывает основную электрическую цепь с тремя дополнительными подсистемами, содержащими элементы управления, измерения и возможностей. Подсистема Controls содержит два контроллера: один для Grid-Side Converter (AC/DC) и один для Machine-Side Converter (DC/AC). Подсистема Возможностей содержит две временные возможности: один для Grid-Side Converter и один для ASM. Когда модель выполняется, открывается Анализатор Спектра, который отображает частотные данные для Тока Питания A-Фазы.

Трехфазный асинхронный привод с бездатчиковым управлением
Управление и анализ операции асинхронной машины (ASM) с помощью бездатчикового управления полем ротора. Модель показывает основную электрическую цепь с тремя дополнительными подсистемами, содержащими элементы управления, измерения и возможностей. Подсистема Controls содержит два контроллера: один для Grid-Side Converter (AC/DC) и один для Machine-Side Converter (DC/AC). Подсистема Возможностей содержит две временные возможности: один для Grid-Side Converter и один для ASM. Когда модель выполняется, открывается Анализатор Спектра, который отображает частотные данные для Тока Питания A-Фазы.

Трехфазный двухуровневый генератор ШИМ
Используйте Генератор ШИМ (Трехфазный, Двухуровневый), чтобы управлять Конвертером. Входами к генератору PWM являются опорные формы AC и постоянное напряжение 400 В. Существует одна временная возможность для формы контроллера.
Ссылки
[1] Chung, D. W., J. S. Kim, and S. K. Sul. Унифицированный метод модуляции напряжения для трехфазного преобразования степени в реальном времени. Транзакции IEEE по отраслевым приложениям, том 34, № 2, 1998, стр. 374-380.
[2] Hava, A. M., R. J. Kerkman, and T. A. Lipo. «Простые аналитические и графические методы для накопителей PWM-VSI на основе несущей». Транзакции IEEE по степени, том 14, № 1, 1999, стр. 49-61.
Модуль генератора PWM: использование и тест

HW-753 это миниатюрный генератор PWM (ШИМ) с регулируемым рабочим циклом 0-100% и частотой 1 Гц – 150 кГц. Напряжение питания 3,3 В – 30 В, при 5 В потребляемый ток 10 мА. Настройки запоминаются после выключения и включения питания, восстанавливаются последние установленные значения. Когда удерживаем кнопку частоты или заполнения (скважности) в течение более длительного времени, скорость изменения увеличивается.

Насколько точным является значение выходной частоты по отношению к настройке. В описании аппарата информация про 2%, а по результатам тестов это +/- 1 последняя цифра показания. ЖК-дисплей с подсветкой очень удобен для чтения.
- Для диапазона 1–999 Гц число на дисплее — Гц.
- Для 1 кГц – 9,99 кГц это уже 1.00, то есть точка обозначает 1 кГц и сотни и десятки Гц.
- Для 10 кГц – 99,9 кГц имеем показание 10.0 и разрешение показаний падает до 100 Гц.
- Для 100 кГц – 150 кГц чтение 1.0.0 и разрешение 1 кГц.

Выход ШИМ выполнен на транзисторе в цепи ОС, в коллекторной цепи включен резистор 1 кОм подключенный к плюсу питания, так что это типичный управляющий выход с малым выходным/входным током. В модуле есть UART для управления настройками. HT1621B – это драйвер ЖК-дисплея, а затертая микросхема, вероятно, является клоном N76E003AT20 от Nuvoton.

Далее осциллограммы выходных сигналов:

Для чего можно использовать модуль PWM
Иногда пульты управления общаются с управляемым, например приводом вентилятора, посредством цифровой передачи, а иногда это обычный ШИМ с частотой 100 Гц. Контроллер двигателя вентилятора или освещения считывает заполнение и управляет приводом в соответствии с настройками. Если такой сигнал ШИМ передает информацию 20%, инвертор для привода переменного тока или ШИМ с гораздо более высокой рабочей частотой устанавливается на значение 20%. Частота сигнала часто не критична, так как можно рассчитать скважность сигнала, несущего информацию о настройках. Это простое и эффективное решение, которое можем протестировать именно с таким модулем. А благодаря широкому диапазону рабочих напряжений часто возможно питание модуля от самого управляемого устройства.
Еще одно интересное применение — эксперименты с индуктивностями, драйверами и преобразователями, где нужен управляющий сигнал с регулируемой частотой и коэффициентом скважности. Раньше на таком экспериментальном поле были NE555 с потенциометром и переключаемыми конденсаторами, теперь же можем удобно выставлять значения кнопками.
Схожий модуль используется достаточно регулярно, например, для проверки работоспособности тахометра. Также это очень полезный генератор. Тестирование драйверов шаговых двигателей или управление зеркальным двигателем от лазерных принтеров (копировальных аппаратов). Иногда для контроля скорости переключения входов тестируемых драйверов. Иногда даже использовались неизвестные пьезо-преобразователи для определения резонансной частоты.

Аналогичный модуль, но с импульсом, использовался для проверки клапанов автокондиционера. Версия с генератором импульсов более удобна в использовании, для имитации/проверки датчика уровня воды в стиральной машине.

Словом, то, что может пригодиться в любой радиолюбительской мастерской. И особенно большим преимуществом здесь является широкий диапазон питающего напряжения. А если есть желание собрать подобное устройство самому – вот схема на микроконтроллере.