Изготовление головы для самодельного робота, конструкция поворотного механизма
В этой статье описано проектирование и изготовление головы для робота, в которой будут совмещены датчики и устройства вывода информации. Для ее поворотов и наклонов будет использоваться самодельный поворотный механизм с двумя сервоприводами.
Покажу как из подручных средств и материалов можно изготовить вполне годное как для экспериментов решение. Расскажу про внутренности головы самодельного робота, ее сенсоры и устройства отображения, приведу схему соединений электронных компонентов и модулей.
Также будет детально описан процесс проектирования и изготовления двух вариантов поворотных механизмов — на дешевых и более дорогих сервомоторчиках. Все с чертежами и фото.
Для чего роботу нужна голова?
Это вопрос, который стоит себе задать прежде чем двигаться дальше.
Зачастую в самодельных роботах можно и вовсе не увидеть никакой головы, а видеокамеру и разные датчики крепят прямо к шасси. Роботизированная платформа на колесах поворачивается одновременно с видеокамерой и датчиками. Просто и дешево.
Я же решил поступить по другому — наделить робота Zer0 полноценной головой, которая сможет поворачиваться по сторонам и наклоняться вниз и вверх. Так он будет более похож на что-то живое, не станет выглядеть как просто «повозка на колесах» с камерой и клубком торчащих во все стороны проводников.
Простейший макет головы со светодиодами в качестве глаз уже будет смотреться достаточно привлекательно и «живее», а ведь можно пойти и дальше.
Было принято решение интегрировать в голову робота некоторые полезные датчики и устройства, которые раньше планировались к размещению на шасси.
К тому же, собранные в одной коробочке компоненты будут одновременно поворачиваться и наклоняться с помощью специального механизма на основе двух сервоприводов.
Вот что будет в роботизированной голове:
- Видеокамера + микрофон;
- Дисплей для отображения текстовой и графической информации;
- Пироэлектрический датчик движения (пиродатчик, PIR);
- Маломощный фонарик.
С помощью видеокамеры и микрофона можно будет смотреть и слушать все вокруг, снимать видео и делать фотоснимки. Пироэлектрический датчик движения поможет определить что в поле зрения находится живое (теплое) существо, а фонарик будет полезен в темноте и когда нужна подсветка или подача светового сигнала.
У размещенного на голове робота миниатюрного графического дисплея будет намного больше полезных возможностей, чем если бы он был просто прикручен к шасси. Например, можно будет отображать какие-то эмоции (смайлики, глаза), знаки внимания, восклицания и т.д. Это все можно отображать синхронно и в зависимости от наклона головы — будет смотреться как минимум забавно.
Таким образом, это сделает взаимодействие с роботом не только проще, но и приятнее: смотря на голову на дисплее можно будет видеть информацию и эмоции, при этом камера с микрофоном будет направлена прямо к «собеседнику».
Компоненты и их подготовка
В качестве камеры была выбрана Logitech C270 HD. Она позволяет получить достаточно хорошее изображение с разрешением 720p (1280×720 пикселей) при частоте кадров до 30fps, имеет встроенный микрофон и индикатор активности (зеленый светодиод). Стоимость такой камеры — примерно 30$.
Датчик движения (инфракрасного излучения) — PIR HC-SR501, готовый модуль с пироэлектрическим датчиком и схемой сравнения, позволяющей переменными резисторами настроить чувствительность срабатывания.
Для отображения информации будет использован миниатюрный OLED дисплей SSD1306 с разрешением 128×64 пикселей. Я уже описывал его подключение и применение в статьях: OLED дисплей SSD1306 (128х64px) и Raspberry Pi, подключение и эксперименты и Самодельный роутер и мини-сервер на Raspberry Pi.
В качестве подсветки будут выступать шесть сверхъярких светодиодов с отражателем. Донором выступит купленный на базаре за копейки дешевый фонарик, питающийся от двух таблеточных литиевых батареек CR2032.
Рис. 1. Компоненты головы самодельного робота, веб-камера C270, дисплей SSD1306, пиродатчик и фонарик.
Веб-камера — один из самых затратных по цене (после компьютера Raspbery Pi) компонентов в моем самодельном роботе. Можно применить модель и подешевле, но при экспериментах с OpenCV (Open Computer Vision, компьютерное зрение) и видеосъемке картинка будет гораздо хуже, о чем потом можно пожалеть.
Большим плюсом веб-камер от Logitech можно считать их поддержку и встроенные драйвера в разных операционных системах, в том числе в Linux и Raspberry Pi OS.
Теперь нужно разобраться с тем в каком виде все это будет размещено в голове будущего робота. Можно конечно «все вместе примотать скотчем или закрепить на досочке» — но это не наш случай.
Решил разобрать веб-камеру и фонарик для оценки того, сколько места можно сэкономить оставив их без лишних частей.
Внутри корпуса веб-камеры расположена плата с контроллером, чувствительной матрицей и микрофоном, есть свободное место:

Рис. 2. HD веб-камера Logitech C270 в разобранном виде, фото платы с компонентами.
Внутри фонарика все просто: кнопка с резинкой для защитой от влаги, две батарейки на +3В и круглая платка с шестью светодиодами и отражателем:

Рис. 3. Дешевый светодиодный фонарик в разобранном виде, шесть светодиодов, кнопка и две батарейки CR2032.
Из фонарика будет задействована лишь платка со светодиодами и отражателем. От веб-камеры останется электронная плата и часть пластиковой передней панели, поскольку здесь удобно рядом расположены окошко для камеры, отверстие микрофона и часть с просветкой для светодиода:

Рис. 4. Части веб-камеры Logitech C270, которые будут задействованы при изготовлении головы самодельного робота.
Светодиод можно выпаять и припаять проводниками в любом другом месте головы робота (в том числе с обратной стороны), с микрофоном можно поступить также. Тогда можно и вовсе отказаться от применения части передней панели камеры, нужно будет лишь подготовить круглое отверстие для сенсора камеры.
Планирование макета и размеров
С компонентами все ясно, теперь нужно спланировать как они будут размещены в голове у робота, прикинуть ее будущие размеры и толщину.
Берем листочек бумаги в клеточку, ручку или карандаш и начинаем игру в «складалки». 🙂
Суть игры: ищем конфигурацию размещения компонентов (камера, датчик, дисплей и фонарик) при которой они собраны максимально удобно и компактно. Делаем начертание границ прямоугольника полученной конфигурации, потом в его пределах пробуем сделать еще какие-то «оптимизации» по размещению с точки зрения удобства монтажа и эстетики будущего вида.
Когда самое оптимальное расположение найдено и границы начерчены — чертим немного выше на том же или другом листе бумаги точно такой же прямоугольник. В нем делаем примерную разметку размещения модулей и компонентов.
Вот как это выглядело в моем случае:

Рис. 5. Эксперименты по разметке и размещению модулей в самодельной голове для электронного робота.
Дисплей будет размещен над частью платы от веб-камеры, а пиродатчик и фонарик рядом в нижней части. Получается достаточно компактно и удобно.
Теперь на одном из начерченных макетов можно сделать наметки для отверстий, через которые модули будут крепиться к передней или задней стенке корпуса головы:

Рис. 6. План размещения датчиков и компонентов в самодельной голове для робота на основе Raspberry Pi.
Теперь можно переходить к поиску подходящего готового корпуса или же к подбору материалов для его изготовления.
Изготовление корпуса
Корпус должен быть легким, компактным и в тоже время достаточно прочным. Его можно изготовить с нуля (например из пластмассы, дерева) или попробовать найти какой-то готовый каркас или коробку.
Бегло осмотрев то что есть в кладовке первым мне попался какой-то пенал из прозрачного и тонкого пластика. Решил попробовать разместить все компоненты и собрать голову робота в нем.
Уже на этапе сверления первых отверстий стало понятно что этот пластик достаточно хрупкий, к тому же коробка получается прозрачной. в общем решил подыскать что-то другое.
Далее рассматривал в качестве кандидатов и доноров не только пустые пластиковые коробки, но и те в которых уже что-то собрано, например какое-то устройство. Нашлось несколько вариантов с подходящими по размерам корпусами из металла, но они очень тяжелые.
И тут нашлась упаковка с несколькими дешевыми и уже нерабочими китайскими мультиметрами Uni-T, а также запчастями к ним. Покрутив такой мультиметр в руках начал генерировать варианты и идеи применения его корпуса в качестве коробки для головы будущего робота.
Качество некоторых следующих фото будет «не очень» (так уж сложилось), но вполне достаточным для понимания всех процессов.

Рис. 7. Корпус от китайского мультиметра Uni-T M830BUZ — будущая коробка для самодельного устройства.
Этот корпус изготовлен из прочного пластика черного цвета и состоит из двух частей, он легко разбирается. Передняя часть с лицевой панелью и надписями для моей задачи не годится, придется ее заклеить или вообще заменить сплошным куском пластика. Также корпус мультиметра достаточно вытянут, придется его укорачивать.
Используя ранее начерченный на бумаге в клеточку план размещения компонентов прикинул примерные размеры корпуса — получается практически квадрат.
Отрезал верхнюю часть передней панели мультиметра, также убрал все что внутри получившейся крышки — оставил только боковушки:

Рис. 8. Вырезаем части коробки от неисправного мультиметра Uni-T для сборки корпуса самодельного устройства.
Работы выполнял с помощью лобзика и пилочки по дереву. Все делалось аккуратно, чтобы не надломить края. Но даже если и случится надлом — не критично, потом можно быстренько все склеить обратно.
Отмерял сколько у полученной буквы «П» не хватает до нужного мне размера корпуса и отрезал недостающий кусочек уже с нижней части остатка от передней панели мультиметра.
В нижней части решил не вырезать всю панель чтобы вышла буква П, а оставить небольшой кусочек. НИжняя часть будет более монолитная, к ней будет прикручиваться крепление, а также там не будет никаких отверстий под внешние компоненты (камера, фонарик, дисплей, датчик).
Получилось вот так:

Рис. 9. Подготовка каркаса самодельной коробки из пластиковых частей от дешевого мультиметра.
Пришло время склеить вместе получившиеся две части. Для этого использовал дихлорэтан, можно также использовать растворитель. Склеивание нужно выполнять в хорошо проветриваем помещении с вытяжкой или же на улице.
Дихлорэтан достаточно токсичное и легко выветривающееся вещество, я даже использовал его как тестовый токсин в эксперименте с датчиком газов MQ-135, а также в детекторе уровня опасных газов на Raspberry Pi и с OLED дисплеем SSD1306.
С помощью спички наносил капельки на склеиваемые поверхности, растирал их для достижения некоторого уровня растворения пластмассы и потом склеивал вместе.

Рис. 10. Склейка двух вырезанных частей пластикового корпуса от мультиметра Uni-T, самодельная коробка.
Получился каркас будущего корпуса для головы робота. Еще раз прикинул как в нем будут размещены все компоненты, убедился что все хорошо подходит.
Теперь из остатков коробки от мультиметра вырезал по размеру получившегося каркаса две части для задней крышки:

Рис. 11. Две части, вырезанные из задней крышки пластикового корпуса от мультиметра Uni-T.
Склеил части для формирования задней крышки, проверил удается ли собрать коробку до кучи:

Рис. 12. Практически готовая коробка корпуса из частей пластикового корпуса от мультиметра Uni-T.
Осталось заполнить пустое окошко спереди, куда будут крепиться все компоненты.
Для этой цели нашел кусок достаточно толстой листовой пластмассы черного цвета. К тому же мне понравилась ее поверхностная волнистая текстура — будет смотреться интересно.
Сделал разметку прямоугольника для вырезания, оставив при этом по всему периметру запас в один-полтора миллиметра. Этот запас пригодится для точной подгонки заготовки под окошко внутри коробки.
Резку пластмассы по размеченным линиям выполнял с помощью самодельного резачка, изготовленного на точильном станке из куска полотна от пилы по металлу.
Такой же резак можно применять для резки стеклотекстолита при изготовлении самодельной печатной платы методом ЛУТ. В статье про изготовление самодельного роутера на Raspberry Pi я использовал аналогичный резак для резки органического стекла.

Рис. 13. Самодельный резак для разрезания листовой пластмассы по ровным линиям, изготовлен из полотна пилки по металлу.
С помощью наждачной шкурки и надфилей вырезанная пластина была точно подогнана под окошко в получившемся корпусе.

Рис. 14. Пластмассовая вставка для передней панели самодельной коробки, изготовленной из частей от корпуса дешевого мультиметра.
Дальше последовала клейка тем же дихлорэтаном и коробку-заготовку для головы будущего робота фактически готова.
Установка и подключение компонентов
Расставил на ней сверху компоненты в соответствии с ранее проделанной планировкой:

Рис. 15. План размещения компонентов в корпусе самодельного корпуса для головы робота.
Первым делом решил сделать овальное отверстие под веб-камеру. Выполнил разметку контура для вырезания с небольшим запасом. Для черчения удобно использовать циркуль и линейку, но можно воспользоваться методом «обводки и выдавливания» (назову его так).
Я уже не раз использовал этот метод, например при креплении КПЕ в самодельном одноламповом радиоприемнике, для крепления радиатора при доработке системы охлаждения лабораторного блока питания.
Суть такого метода проста: чтобы получить точный контур определенной детали, кладем на нее лист бумаги и обводим по всему периметру и отверстиям простым карандашом, иногда бывает достаточно просто обвести пальцами с некоторым усилием.
В данном случае получилось вот так:

Рис. 16. Обводим контур фигурной детали приложив на нее бумагу, получаем точный трафарет.
Осталось вырезать получившийся трафарет, который можно приклеить на заготовку для вырезания отверстия или же использовать для сверки при разметке отверстия с помощью циркуля и линейки.
После разметки высверлил сверлом 3мм внутри овала отверстие и запустил туда пилочку от лобзика. С помощью надфилей подогнал размеры вырезанного отверстия, теперь корпус от камеры точно в него вписывается.

Рис. 17. Отверстие для крепления веб-камеры в самодельном корпусе головы робота.
Но есть проблема: высота овального выступа на отрезке из корпуса камеры всего лишь 1 мм, а глубина отверстия в изготовленном корпусе (пластина которую клеили на передней части) где-то 3мм — будет смотреться не красиво.
Чтобы это исправить, решил с помощью скальпеля и резцов убрать часть пластмассы с обратной стороны панели (внутри корпуса) так, чтобы овальная часть корпуса от камеры при установке была на одном уровне с поверхностью передней панели.

Рис. 18. Подгонка толщины корпуса в отверстии для крепления передней части от веб-камеры.
Приклеил корпус камеры на место. Дальше просверлил отверстия для пиродатчика и фонарика. В случае с последним, стекло фонарика будет приклеено спереди корпуса, поэтому вокруг отверстия выбрал еще небольшую канавку чтобы это стекло после клейки было наравне с поверхностью корпуса.

Рис. 19. Подготовка отверстий для установки пиродатчика и фонарика в голову самодельного робота.
Разместил компоненты внутри передней части корпуса для оценки того что получается:

Рис. 20. Размещение модуля веб-камеры, пироэлектрического датчика, фонарика и дисплея в голове робота.
Все складывается и устанавливается отлично, можно двигаться дальше.
Прямоугольное отверстие для дисплея было вырезано лобзиком и потом подогнано с помощью надфилей. Перед дисплеем будет установлено еще тонкое прозрачное оргстекло.
Чтобы это стекло не было сильно углублено если смотреть на корпус спереди, решил с помощью резца выбрать небольшую канавку с внутренней стороны.
Чтобы при вырезании пластмассы опилки не разлетались по всему столу — сделал из листа формата А4 небольшое корытце с бортиками.

Рис. 21. Подготовка отверстия для крепления OLED-дисплея в самодельной голове для будущего робота на Raspberry Pi.
Приклеил изнутри к корпусу органическое стекло, сверху на нем разместил дисплей и приклеил его по краям каплями силикона.

Рис. 22. Установка OLED-дисплея SSD1306 в корпус головы самодельного робота.
Пришло время для установки всего на свои места и для выполнения соединений.
Вот такая получилась схема:

Рис. 23. Схема соединений веб-камеры, OLED-дисплея, пиродатчика, фонарика и электронных силовых ключей в голове робота.
К веб-камере будет подключен экранированный USB-кабель с коннектором. Через этот кабель будет браться напряжение +5В для питания OLED дисплея и двух силовых ключей, которые в свою очередь будут управлять подачей питания на пиродатчик и светодиодный фонарик.
Для чего сделано управление подачей питания на пиродатчик? — для экономии энергии, поскольку он постоянно потребляет примерно 50мА.
Чтобы фонарик из 6-ти светодиодов при достаточной яркости потреблял меньше тока, его модуль будет подключен через гасящий резистор (на схеме не показан), сопротивление которого подбирается экспериментально с помощью переменного резистора на 470 Ом.
Силовые ключи представляют собой небольшую схему из маломощного кремниевого и мощного полевого транзисторов, о них я подробно рассказывал в предыдущей статье.
На каждый из таких ключей подаем питание, на выход подключаем нагрузку (в данном случае пиродатчик и светодиоды), а управление выполняется установкой высокого или низкого уровня на отдельном входе.
Таким образом, кроме 4х-жильного экранированного USB-кабеля понадобится еще 5 проводников. Не найдя ничего подходящего для данной цели решил использовать кусок экранированного 4х-жильного кабеля.
Оплетку его экрана можно использовать как дополнительный сигнальный вывод. В данном случае кабель будет достаточно коротким, по его проводникам будут течь маленькие токи, поэтому за помехоустойчивость линий SDA/SCL для OLED-дисплея можно не переживать.
Оба кабеля закреплены на задней крышке головы робота. Чтобы обеспечить гибкость и кабели при изгибах не повредились — для одного из них использована резиновая муфточка, я для второго два слоя термоусадок. Фиксация изнутри выполнена с помощью силикона.

Рис. 24. Передняя и задняя части корпуса самодельной головы для робота на основе Raspberry Pi.
Осталось выполнить все соединения внутри:

Рис. 25. Процесс соединения компонентов и датчиков внутри головы робота.
Дальше будут описаны два варианта поворотных механизмов, которые можно использовать как для вращения головы самодельного робота, так и для позиционирования отдельной веб-камеры, роботизированной руки, игрушечной «ракетной» пусковой установки и т.д.
Поворотный механизм на основе дешевых сервоприводов
Поворотный механизм должен позволять выполнять управляемое вращение прикрепленного к нему узла вокруг вертикальной и горизонтальной осей. Таким образом, голова самодельного робота сможет поворачиваться вокруг, а также наклоняться вверх и вниз.
В этом варианте конструкции будут использованы не дорогие (примерно 1,5$) и миниатюрные сервоприводы Tower Pro 9g SG90.

Рис. 26. Сервопривод Tower Pro 9g SG90, назначение проводников для подключения.
- Номинальное напряжение питания: от 3В до 5В;
- Угол поворота: 0° — 180°;
- Усилие на валу: 1.2кг/см (при 4.8В); 1.6кг/см (при 6.0В);
- Мертвая ширина импульса: 2мс;
- Шестеренки редуктора изготовлены из нейлона;
- Размеры: 22 x 11.5 x 27 (мм);
- Вес: 9 грамм без проводов, 13 грамм с проводами;
- Температурный режим: от -30° до +60° (по Цельсию).
Несмотря на свои размеры и вес такой сервопривод достаточно сильный. Но следует учитывать то, что его вал и шестеренки изготовлены из пластика.
Вал такого сервопривода нельзя сильно нагружать (прикладывать длинное плечо), иначе он может просто поломаться или же нарушить свою позицию внутри механизма.
На листике бумаги в клеточку я сделал наброски нескольких простейших вариантов механизма с применением двух сервоприводов. Размеры приводов рисовал в натуральную величину, просто приложив к бумаге и обведя их контур.

Рис. 27. Несколько вариантов построения поворотного механизма на основе двух сервоприводов SG90.
Вариант «A» (по середине) предполагает использование двух П-образных пластик, к каждой из которых крепится по сервоприводу. Это первый набросок, который сделан для понимания того, от чего нужно отталкиваться и куда дальше двигаться.
В варианте «B» (справа) показана упрощенная и уже более более компактная модификация варианта «A».
Вариант «C» (слева) выполнен с использованием лишь одной П-образной пластины, сервоприводы соединяются вместе с использованием широкого блока. Свободное ушко второго привода крепится к стенке с помощью Г-образного винта, который будет выполнять роль шарнира.
В варианте «D» (сверху) используется минимум деталей, сервоприводы соединяются с помощью простейшего миниатюрного блока прямоугольной формы, аналогичное решение используется для шарнира с обратной стороны П-образной пластинки.
Цель к которой я шел — уменьшить дистанцию «P» между осью первого привода и вершиной второго привода (куда будет крепиться поворачиваемый объект).
Таким образом, наиболее сбалансированным по нагрузке вариантом является схема «D«. Из-за отсутствия второй пластины, к которой крепится второй привод, она немного уступает по прочности варианту «B«, но не сильно и это вполне компенсируется простотой решения. К тому же оба эти варианта можно совместить, но реализация окажется сложнее.
Используя размеры схемы в натуральную величину можно приступать к изготовлению пластинки. Для облегчения общего веса конструкции можно использовать алюминий и дюраль.
Прямоугольное отверстие под серво-движок в алюминиевой пластине можно несколькими методами, например: 1) вырезать с помощью лобзика 2) с помощью дрели насверлить отверстий по периметру внутри, а потом убрать остатки с помощью напильника и надфилей.

Рис. 28. Изготовление основы простого поворотного механизма на сервоприводах.
Блок, которым будут соединены оба сервопривода (ось первого с корпусом второго), решил выполнить также из алюминиевой бляхи. Пластинку согнул под углом 90 градусов, сделал отверстие и усики для прикручивания к ушку второго сервопривода.
Сперва для крепления пластикового рычажка сервопривода к пластине думал использовать маленькие винтики, но потом понял что придется рассверливать отверстия в самой пластике, площадь которого итак не велика — получится не надежно.
Учитывая небольшую планируемую нагрузку, решил что вполне достаточно будет соединить пластиковую насадку с пластиной используя толстую медную проволоку.

Рис. 29. Изготовление соединяющего блока для простейшего поворотного механизма на основе серво-движков SG90.
Прикрутив первый сервопривод к пластине, а корпус второго к валу первого с помощью самодельного блока получил следующую картину:

Рис. 30. Крепление сервоприводов к основе поворотного механизма и между собою.
Теперь необходимо изготовить блок с шарниром, который будет крепить ушко второго сервопривода к алюминиевой пластине. После этого нужно будет загнуть пластинку основы к виду буквы П, точно отмерив необходимую длину с учетом размеров и крепления у получившегося блока.
Исходя из деталей и запчастей в наличии начал искать решения.
Изготовил небольшую пластинку из алюминия, к ней будет крепиться пластиковый цилиндр с отверстием, а в последнем будет вращаться металлический стержень, прикрепленный к стенке П-образной основы.

Рис. 31. Попавшиеся под руку детали для изготовления блока с шарниром к поворотному механизму на сервоприводах.
В общем, что-то из этого можно было придумать, но нашелся стержень из металла с ограничителем и резьбой внутри. Также решил упростить крепление пластикового цилиндра к ушку, поскольку выяснилось что если его прикрутить непосредственно (без алюминиевой пластины) то ось внутри совпадает с осью вала первого сервопривода.

Рис. 32. Еще один вариант крепления блока с шарниром для системы с сервомоторами SG90.
Отмерил где нужно сделать изгиб пластины, просверлил в ней отверстие для винта, собрал все вместе и вот что вышло:

Рис. 33. Готовый самодельный поворотный механизм на движках SG90.
Осталось придумать как закрепить голову робота на таком механизме. Тут обязательно понадобится какая-то пружина для страховки, иначе крепление к вала сервопривода от нагрузки просто отломается.
Нашлась стальная гибкая пластина, потом придумал более удачное решение на основе прочной пружины:

Рис. 34. Подбор гибкой пластины, пружины для крепления к поворотному механизму.
Решение с пружиной более предпочтительно, так как в случае если прикрепленную голову робота зацепить рукой или каким-то предметом, то это обезопасит весь механизм от его выламывания. Минусом является покачивание головы когда робот будет перемещаться, картинка через веб-камеру будет не стабильной.
Экспериментируя с креплением ранее изготовленной головы, стало очевидно что держаться и поворачиваться она на таком механизме будет, но очень не надежно (сила удерживания движков не достаточна при таком плече) и серво-механизмы быстро выйдут из строя (чрезмерная нагрузка на пластиковые валы и шестеренки).
Хотелось собрать поворотный механизм именно на этих движках, поскольку они были в наличии в количестве 6-ти штук. что называется «сэкономил».
В итоге решил оставить этот механизм для какой-нибудь другой самоделки. Для управления головой моего робота нужен более прочный и надежный механизм с более крепкими сервоприводами.
Надежный поворотный механизм с качественными сервоприводами
Итак, на очереди новая конструкция с более мощными движками. Прикупил два качественных сервопривода от Sparkfun с металлическими шестернями внутри. Стоимость одного такого движка — примерно 12$.
Корпус изготовлен из прочного пластика черного цвета, в комплекте идет хороший набор разных насадок и деталей для крепления:

Рис. 35. Сервопривод S05NF (micro) от компании Sparkfun.
Характеристики сервопривода S05NF:
- Напряжение питания: 4.8 — 6.0 (В);
- Угол поворота: 0° — 160°;
- Усилие на валу: 2.8 кг/см (при 4.8В), 3.2 кг/см (при 6.0 В);
- Быстродействие: 0.20/0.18 sec / 60 ° (при 4.8 / 6.0 В);
- Шестеренки редуктора изготовлены из металла;
- Размеры: 28.8 x 13.8 x 30.2 (мм);
- Вес: 20 грамм.
В данном случае цветное назначении проводников у S05NF совпадает с SG90. Если применять другой сервопривод, то цветная схема назначения выводов может быть другая — всегда сверяйтесь с даташитом!
Вот таблица с разными схемами цветового обозначения выводов:
| Номер пина |
Название | Схема 1 (Futaba) |
Схема 2 (JR) |
Схема 3 (Hitec) |
| 1 | Земля (GND) | Черный | Коричневый | Черный |
| 2 | Питание | Красный | Красный | Красный , Коричневый |
| 3 | Сигнал управления |
Белый | Оранжевый | Желтый , Белый |
План поворотного механизма с новыми движками получился следующий:

Рис. 36. Конструкция поворотного механизма для головы робота, собрана на сервоприводах S05NF.
Детали на схеме:
- 1 — основная рама;
- 2 — цилиндр со сквозным отверстием, подшипник;
- 3 — стержни с резьбой для крепления;
- 4 — пластина крепления к подшипнику;
- 5 — блок для крепления сервопривода » B » к пластине с подшипником;
- 6 — насадка для крепления к валу сервопривода » A «;
- 7 — пластина для соединения двух сервоприводов » A » и » B «;
- 8 — блок для крепления сервопривода » A » к пластине 7;
- 9 — насадка для крепления к валу сервопривода » B «.
Принцип работы механизма аналогичный тому что и в предыдущем варианте: к валу сервопривода » A » (через насадку » 6 «) крепится голова робота, а сам сервопривод » A » вращается вокруг оси, которая проходит через подшипник с одной стороны и через вал сервопривода » B » с другой.
Как можно заметить, сервопривод » A » опущен достаточно низко относительно горизонтальной оси вращения. Это нужно для лучшей балансировки и распределения нагрузки.
Здесь мы как бы получаем «качели» относительно основной оси вращения, в которых на одном «сидении» на насадке » 6 » закреплен наш объект (голова робота), а с другой — сервопривод массой 20 грамм. Таким образом получаем небольшой противовес, который при вращении относительно горизонтальной оси уменьшит нагрузку на сервопривод » B «.
Вот как это все воплощалось в реальности.
Изготовление деталей выполнялось в натуральную величину, как на схеме. Но поскольку не всегда удавалось найти подходящие заготовки и материалы, то приходилось вносить небольшие корректировки.
Первым делом взялся за изготовление пластины » 7 » и блока » 8 «, которые через насадку » 9 » соединят корпус сервопривода » A » с валом сервопривода » B «.
В качестве заготовки был использована круглая пластинка из алюминия. Для изготовления блока применен кусочек дюралюминия. Пластинку вырезал лобзиком, а блок — ножовкой по металлу, с доводкой напильником.
Крепление блока » 8 » к корпусу сервопривода » A » будет выполнено винтиком с резьбой на 3мм, а для крепления блока к пластинке » 7 » использованы два миниатюрных винтика на 2мм (как показано на схеме).

Рис. 37. Изготовление пластины и блока для соединения корпуса одного сервопривода с валом второго.
Вот как выглядит собранный вместе узел из пластины » 7 » и блока » 8 «, прикрученный к насадке » 9 «:

Рис. 38. Скрепляющий два сервопривода поворотного механизма узел в сборе.
Обратите внимание на то, как размещены в металлическом блоке все отверстия: два отверстия под винт 2,5мм нужно стараться высверливать перпендикулярно третьему отверстию под винт на 3мм так, чтобы их туннели не пересекались.
Соединив оба сервопривода с помощью недавно собранной детали получилась следующая картина:

Рис. 39. Вал одного сервопривода S05NF соединен с корпусом второго серводвижка с помощью самодельной детали.
Дальше взялся за изготовление основания » 1 «, которое представляет из себя согнутую П-образную пластинку.
В хламе нашлась коробочку из алюминиевой бляхи толщиной 1,5мм. Думал использовать боковушку от нее в качестве заготовки, но полоска оказалась не достаточной по ширине. Решил аккуратно отрезать боковушки и для вырезания пластинки использовать днище коробки.
Но как разогнуть такую металлическую коробку с минимальными деформациями и повреждениями? — тут решил поступить так: зажав коробочку в тиски, спилил напильником все ее углы со стороны дна по всему периметру, потом еще слегка надпилил швы ножовкой и все боковушки красиво и аккуратно загнулись/отломились.

Рис. 40. Как аккуратно распилить металлическую коробку без повреждения и деформаций.

Рис. 41. Разметка алюминиевой заготовки для изготовления основы поворотного механизма на сервоприводах.
Для крепления сервопривода » B » в пластинке было вырезано прямоугольное отверстие и просверлены два отверстия под винтики на 3мм. После этого примерно 5см (как на схеме) пластины было загнуто буквой «Г».
Также нашел в крепеже подходящие вал (компонент » 3 «) кончающийся винтом с одной стороны и отверстием с другой (обе с резьбой) , гайку на 3мм и пластиковый цилиндр (» 2 «) для изготовления шарнира.
Взвесив гибкость/прочность пружины, которая будет использоваться для крепления головы робота к насадке » 6 «, укоротил ее до 3,5 витков.
Считаю нужно более подробно объяснить для чего тут нужна эта пружина:
- При перемещении робота и покачивании его корпуса, она будет гасить инерцию головы, что снизит нагрузку на вал сервопривода » A » по вертикальной оси
- Детишки (и даже взрослые), игривый кот, песик. забавляясь с роботом могут зацепить его голову. Пружина сохранит механизм от перегрузки и повреждения, можно сказать что это «защита от неожиданностей».
Как определить достаточный размер для такой пружины? — временно примотал ее к голове робота, прижал оставшуюся часть к столу и оценил сколько усилия нужно для покачивания по сторонам и в то же время чтобы при небольших колебаниях основы голова не качалась как маятник. Выбрал золотую серединку экспериментально — понемногу откусывая лишние витки и проверяя результат.

Рис. 42. Основание поворотного механизма на сервоприводах, детали для подшипника и защитная пружина.
Для изготовления двух частей » 3 » шарнира, вал был разделен пополам, получилось что: у одной части винт, а у второй отверстие под винт. Отверстие в пластиковом цилиндре » 2 » было рассверлено под диаметр частей » 3 «.

Рис. 43. Блок для крепления сервопривода и детали самодельного пластик-металлического шарнира.
Закрепил систему с сервоприводами на основании, а также изготовил блок » 5 «, который аналогичен по конструкции блоку » 8 «.

Рис. 44. Изготовление поворотного механизма для головы самодельного робота, движки закреплены к основе.
Закрепив блок » 5 » к сервоприводу » A » пришло время заняться поиском заготовки для изготовления пластинки » 4 «. Решил использовать оставшийся кусочек алюминия из которого ранее вырезалась пластина » 7 «, не выбрасывать же его в мусор. 🙂

Рис. 45. Крепление второго блока к сервоприводу, материал для изготовления второй пластины.
Тем временем, уже можно оценить получившиеся размеры основы и изогнуть ее в виде буквы «П» так, чтобы сторона с подшипником была точно подогнана под получившиеся размеры деталей и узлов.
После этого можно просверлить отверстие и закрепить одну из частей » 3 » будущего подшипника.

Рис. 46. П-робразная алюминиевая основа поворотного механизма, подготовка к сборке самодельного подшипника.
Прикрутил к основанию серводвижок » B «. Из оставшегося кусочка алюминиевого круга вырезал пластинку » 4 «, получилась она в виде дуги.
Подготовку и разметку такой пластинки нужно выполнять с учетом того, чтобы крепящаяся к ней часть » 3 » подшипника получилась расположенной на одной оси с валом сервопривода » B «.
Можно временно собрать все части, а вместо пластинки подобрать и изготовить из картона точно подогнанный шаблон. Не исключено что с первого раза может и не получиться — не страшно, берем еще кусок картона и повторяем. Используя получившийся проверенный шаблон можно будет выполнить разметку на заготовке из алюминия.
Вот что получилось у меня:

Рис. 47. Пластина для крепления корпуса миниатюрного сервопривода к самодельному подшипнику.
Собрал все изготовленные ранее детали вместе — поворотный механизм с двумя сервоприводами готов!
Теперь необходимо прикрепить голову робота к насадке » 6 «, используя для этого ранее подготовленную прочную пружину. Стоит отметить что в пластиковой насадке изначально присутствует не малое количество готовых отверстий для крепления.
Сперва думал поступить так: подготовить крестообразную пластинку из алюминия, просверлить на каждом из ее полюсов по отверстию и потом прижать ею пружину к насадке, используя миниатюрные винтики.
Еще одним вариантом соединения является использование клея для резины, но я поступил еще проще — использовал капроновую нить. Я просто примотал пружину к насадке » 6 » в четырех противоположных точках и это при предельной простоте решения обеспечило достаточную прочность и надежность.

Рис. 48. Поворотный механизм для головы робота в сборе, подготовка крепления на основе пружины.
Осталось прикрепить пружину к корпусу головы робота. Для этой задачи была изготовлена небольшая планка из дюралюминия. В ее торцах просверлены отверстия для пропускания через них части витка пружины:

Рис. 49. Планка из дюралюминия для крепления к пружине в поворотном механизме.
В верхней части планки были просверлены еще два отверстия — через них к ней теперь можно прикрутить веб-камеру, голову робота или другое устройство, которое нужно поворачивать по двум осям.
Чтобы в просверленные отверстия удалось запустить круглый виток прочной пружины, их выходы по бокам нужно немножко по стачивать. Делается это с помощью надфиля или другого инструмента.

Рис. 50. Самодельный поворотный механизм на основе двух мощных серводвигателей.
Прикрутив голову робота к планке двумя винтами получилась следующая картина:

Рис. 51. Голова самодельного робота закреплена на поворотном механизме с двумя сервоприводами.
Крепление для поворотного механизма
Для крепления поворотного механизма с головой робота на ранее изготовленном самодельном шасси с силовой электроникой решил собрать дополнительное крепление в виде перекрещенных между собою металлических полосок.
В качестве материала для изготовления использовал оставшийся кусок алюминиевой бляхи, полоску из которой использовал для изготовления основы поворотного механизма.
Получившийся узел будет крепиться к шасси робота с помощью четырех прямоугольных переходников, которые я изготовил из полосок гибкой металлической бляхи (не алюминий), ранее служащей в какой-то конструкции для прижимания кабеля к корпусу.

Рис. 52. Крестообразный узел из металлической бляхи для крепления поворотного механизма с головой к шасси робота.
Все в сборе выглядит вот так:

Рис. 53. Готовая голова самодельного робота с прикрепленным поворотным механизмом и узлом крепления к шасси.

Рис. 54. Как выглядит поворотный механизм с головой самодельного робота сзади.
В завершение
Старался изготовить все побыстрее, поэтому получилось далеко не в лучшем варианте, где-то немного напартачил и промахнулся. Тем не менее, для экспериментального робота такого не сложного решения будет вполне достаточно.
Схему приведенного самодельного поворотного механизма можно с легкостью переделать под другие типы и размеры сервоприводов, не только под S05NF.
Вариант со слабенькими и дешевыми сервомоторчиками SG90 подойдет для вращения каких-то легких и небольших объектов, например для веб-камеры.
roboforum.ru
народ, что вы паритесь? чтоб гироскоп сделать надо всего ничего. Моторчки от плеера, какой-нить маховик и немного пластика и проволоки. Тут же не нужна точность как у баллистических ракет, тут даже самый сопливый гироскоп справится.
Делаем рамку в плоскости диска, по вертикальной оси одеваем ее на ось переменного резистора из сервы, а кочалкой сервы крепим это к шасси. Все, дело в шляпе, эта штука будет держать заданый азимут, как ее ни крути. Если ездить по пересеченке — делаем рамку в рамке (карданный подвес) и 2 сервы. В данном случае погрешность зависит от равномерности трения в переменном резисторе. Чтоб этого избежать — заменяем серву на мотор + контроллер + оптический енкодер. 😉
=DeaD= » 20 окт 2006, 23:04
Vovan » 20 окт 2006, 23:04
-= Александр =- » 20 окт 2006, 23:16
Я строил так, чтоб попробовать. И в целом работало, довести до ума можно! Для девайса сделаного за час из хлама — работал очень даже неплохо! 😉
Синхронизация возможна если знать на какой угол повернулась платформа относительно земли. Тогда можно крутить голову относительно платформы. Но первого значения мы не знаем и знать не можем без какой-то привязки к внешнему миру. Только в теории, кторая сильно храмает от неровноти и материалов под колесами.
Даже енкодеры не спасут от проскальзывания колеса, потому что они привязываются к колесам, а не к земле. Все равно будет ошибка.
А альтернатива есть всегда: пьезогироскоп. Правда стоит он очень уж дико, зато в паре с акселерометром будет готовая инерциалка для навигации.
Еще альтернатива — дальномер в голове. повернули голову — запомнили знчение. Начали рулить — значение поменялось — пошарили вокруг и снова нашли. Не думаю что роботу придется разворачиваться в центре зала, где до стены не достать.
Еще — направленные фотодиоды видимого диапазона. Направили — запомнили освещенность. Рулим и в случае сбоя находим точку.
Находить точку надо в теоретическом ее положении или где-то рядом. если будет работать быстро — сильно сбиться не успеет.
А можно вместе с головой поворачивать ведущие колеса. 🙄
В общем все равно нужен либо круговой локатор, либо гироскоп, чтоб можно было адекватно позиционировать машину. Локатор точнее, а гироскоп универсальнее, но на нем набегает ошибка и время от времени надо его калибровать.
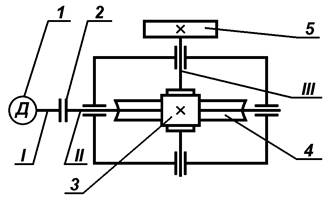
Механизм поворота руки робота с зубчатой передачeй
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-6. Зубчатые передачи.
7. Платформа для крепления руки
Исходные данные
Предлагаемый аналог конструкции [1. кн. 3, с. 208, рис. 5. 2].
Мощность Р, снимаемая с выходного вала IV, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Тип зубчатой передачи 3,4 и 5,6: прямо- или косозубая.
Варианты задания
| N | ||||
| P | ||||
| n | ||||
| L | ||||
| 3-4 | Прямозубая | Косозубая | Прямозубая | Косозубая |
| 5-6 | Косозубая | Прямозубая | Косозубая | Прямозубая |
| Производство единичное | Производство серийное |
Задание № 5
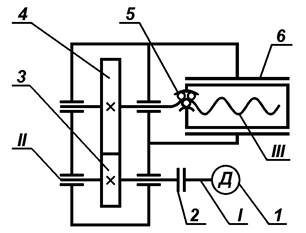
МЕХАНИЗМ ПОВОРОТА РУКИ РОБОТА С ЧЕРВЯЧНОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-4. Червячная передача.
5. Платформа для крепления
Исходные данные
Предлагаемый аналог конструкции [1, кн. 3, с. 208, рис.5. 2].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Варианты задания
| N | |
| P | |
| n | |
| L | |
| Производство единичное | Производство серийное |
Задание № 6
МЕХАНИЗМ ПОВОРОТА РУКИ РОБОТА С КОНИЧЕСКОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-4. Коническая передача.
5. Платформа для крепления
Исходные данные
Предлагаемый аналог конструкции [1, кн. 3, с. 208, рис. 5.2].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Варианты задания
| N | |
| P | |
| n | |
| L | |
| Производство единичное | Производство серийное |
Задание № 7
МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ РУКИ РОБОТА С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
2. Соединительная муфта.
3-4. Зубчатая передача.
5. Шариковинтовая передача.
Исходные данные
Предлагаемый аналог конструкции [l, кн. 3, с. 46, рис. 5.34; 2, с. 46, рис.3. 7].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения вала III, об/мин.
Срок службы L, часов.
Тип зубчатой передачи 3,4: прямо- или косозубая.
Варианты задания
| N | ||||
| P | ||||
| n | ||||
| L | ||||
| 3-4 | Прямозубая | Косозубая | Прямозубая | Косозубая |
| Производство единичное | Производство серийное |
Задание № 8
ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА С ЧЕРВЯЧНОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-5. Червячные передачи.
Исходные данные
Предлагаемый аналог конструкции [З, с. 319, рис. 8.13].
Мощность Р, снимаемая с выходного вала III (IV), Вт.
Скорость n вращения валов III, IV, об/мин.
Срок службы L, часов.
Варианты задания
| N | |
| P | |
| n | |
| L | |
| Производство единичное | Производство серийное |
СОДЕРЖАНИЕ ИНДИВИДУАЛЬНЫХ РАБОТ
1. Описание работы механизма.
2. Предварительный выбор двигателя.
2.1. Расчет требуемой мощности двигателя.
3. Расчет редуктора.
3.1. Кинематический расчет.
3.2. Расчет геометрических размеров.
3.3. Расчет шариковинтовой передачи (для заданий 1,2,3,7)
4.Проверочный расчет требуемой мощности двигателя.
5.Предварительный расчет валов.
6.Расчет момента инерции редуктора.
7.Расчет мертвого ходa.
8.Подбор и расчет подшипников выходного вала.
9.Обоснование применяемых материалов и типа смазки.
3. Методические указания на выполнение индивидуальной работы
3.1.1. Задание на индивидуальную работу
Задание должно содержать номер, вариант и название, кинематическую схему механизма и исходные данные по своему варианту, например: скорость вращения вала III nIII=550 об/мин.
Описание работы механизма
В расчетно-пояснительной записке необходимо представить исходную кинематическую схему и описать работу механизма в составе промышленного робота, в котором механизм может быть применен. Также нужно указать предполагаемые условия эксплуатации и их влияние на характеристики устройства.
РУКА-МАНИПУЛЯТОР ДЛЯ РОБОТА
Сейчас вы узнаете как создать руку-манипулятор для робота, изготовленную на базе обычных серво, пары шестеренок и из пластин алюминия. Хотя можно купить готовые комплекты роботов-манипуляторов, они, как правило, дороги и довольно слабы. В общем сейчас выясним, можно ли в домашних условиях сделать качественный манипулятор 6-степеней свободы.

Механическая конструкция рычага основана на 2-х универсальных конструкциях кронштейнов и нескольких меньших блоках. Поворотные части изготовлены из стандартных сервоприводов и небольших фланцевых подшипников, чтобы максимально упростить конструкцию. Все части проекта были разработаны в libreCAD – пакет 2D САПР с открытым исходным кодом. В качестве примера приведено изображение конструкции сервоблока:

Построение руки робота
Сборка кронштейна сервопривода
Кронштейн для сервопривода изготовлен из листа алюминия 2 мм. Поскольку понадобится 5 этих скоб, хорошей идеей будет создать шаблон или программу под ЧПУ, чтобы сделать сверление проще и согласованнее.

Теперь нужно разрезать кусок алюминия толщиной 2 мм по размеру (для этого использовал комбинацию торцовочной пилы, лобзика и пилы). Поместите алюминий в тиски с шаблоном сверху и начните с точечной штамповки маркеров и линий сгиба, показанных на шаблоне. После этого делайте сверление направляющих отверстий для остальной части кронштейна.
Выньте алюминий из тисков и просверлите направляющие отверстия до нужного размера, как показано на чертеже CAD. Чтобы упростить складывание, использовал квадратную линейку для разметки линий сгиба в соответствии с пунктирными линиями: Перед тем, как согнуть алюминий, сначала нужно будет увидеть две линии в верхней части кронштейна. Чтобы согнуть кронштейн, поместите его в тиски:

Выровняйте линию сгиба и затем поместите кусок дерева по скобе. Сложите его назад, нажав на дерево. Это помогает поддерживать давление даже на кронштейне и сгибать его, не искажая форму. Вы можете использовать края дерева, чтобы согнуть меньшие части аналогичным образом. Закончив сгибание кронштейна используйте шаблон и линейку, чтобы отметить линию разреза на передней части кронштейна, а затем отпилите ненужный материал: Когда скоба полностью обрезана и готова, рекомендуется напильником сгладить все острые или неровные края. Скобка должна выглядеть примерно так:
Сборка С-кронштейна
С-образная скоба выполнена практически идентично кронштейну для сервопривода. Здесь использовались алюминиевые полоски 25 мм x 1000 мм x 2 мм как для шаблона, так и для самих кронштейнов. Так же, как кронштейн для сервопривода, сначала режете алюминий по размеру, а затем склеиваете CAD-шаблон поверху. Готовый шаблон и шаблон должны выглядеть примерно так:

После того как кронштейн просверлен, выньте деталь и заново просверлите отверстия до правильных размеров, как показано на чертежах CAD. При сгибании кронштейна соблюдайте осторожность – надо убедиться, что сгибаете всё одинаково. Нужно будет сделать как минимум три из этих скоб для руки робота:
Сборка L-кронштейнов
Рука робота имеет 3 разных L-образных кронштейна для средней части руки, запястья и концевого крепления. Поскольку все эти скобки имеют разные размеры, нет необходимости создавать шаблон. Просто нарежьте алюминий по размеру (полоски 25 мм х 1000 мм х 2 мм) и наклейте чертежи САПР на полосы разреза. Сделайте точный удар по шаблону, а затем просверлите детали.

Сборка манипулятора
Так как манипулятор робота относительно тяжелый, нижний сервопривод нуждается в достаточной поддержке для плавного вращения. Для этого рычаг монтируется на поворотном столе, который поддерживается четырьмя роликами, которые снимают сервопривод с веса, размещенного в поперечном направлении через сервопривод (он без поддержки может легко скрутить сервопривод и повредить его).

Основание поворотного стола выполнено аналогично кронштейнам. Напечатанный шаблон САПР помещается поверх листа алюминия и удерживается на месте с помощью скотча. Образец резания и сверления затем точечно накернивается в материале. После удаления бумаги используйте стальную линейку, чтобы выделить линии разреза:
Полученную форму затем вырезаем из алюминия, а затем собираем в форму. Обратите внимание на прямоугольный рисунок в центре детали – это схема сверления для вырезания алюминия, чтобы можно было установить сервопривод. Эту часть просверливают, а затем вырезают с помощью Дремеля, прежде чем подать в форму, чтобы сервопривод легко помещался в посадочное место.
Для поддержки верхней вращающейся части поворотного стола вокруг внешней части детали расположены четыре небольших колесика для мебели. Это довольно распространенные вещи, которые можно купить в большинстве мебельных магазинов. Ролики крепятся к основанию с помощью винтов M4 и гаек. После установки сервопривода и роликов нижний поворотный стол должен выглядеть следующим образом:

Затем основание поворотного стола прикрепляется к четырем алюминиевым пластинам, вырезанным из прутка 40 мм х 1000 мм х 2,5 мм. Опять же размеры и схема сверления включены в чертежи САПР.
Для прикрепления поворотного стола к ножке робота предусмотрены 4 алюминиевые трубки (8 мм диаметром и толщиной 1 мм), нарезанные по 30 мм. Они удерживаются на месте резьбовым стержнем M3, который обрезается по длине и затем крепится болтами с обоих концов. Обратите внимание, что стопы недостаточно для удержания руки робота, когда она полностью выдвинута в одну сторону (это приведет к перебалансировке). Пластины должны быть закреплены на более тяжелой плоской поверхности, однако хотел иметь возможность поднять руку во время работы над сборкой. Основание и ножка поворотного стола показаны на следующем рисунке:

Верхняя часть манипулятора выполнена аналогично основанию. Перед установкой верхней части поворотного стола на основание один из кронштейнов сервопривода крепится к верхней части. Обратите внимание, что двойной кронштейн с сервоприводом слегка приподнят (на 4-х гайках M3), чтобы обеспечить свободное пространство для руки робота над основанием при вращении плечевого сустава руки. Нужно будет высверлить основание крепления сервопривода, чтобы винт с сервоприводной головкой хорошо прилегал (чтоб могли удерживать верхнюю часть поворотного стола на месте). Необходимо убедиться, что высота поворотного стола соответствует используемому сервоприводу. При необходимости можете поднять ролики, просто подкладывая шайбы под них.

На следующем рисунке показана конструкция кронштейна с двумя сервоприводами и крепления. Кронштейн состоит из элемента с двумя сервоприводами, на котором в свою очередь закреплены 2 других кронштейна с серво. Обратите внимание, что передний кронштейн имеет заднюю часть, которая позволяет установить кронштейн C на задний сервопривод перед установкой переднего сервопривода:
Сборка руки робота
Чтобы начать сборку рычажного механизма, начните с закрепления болтами всех сервоприводов с помощью винтов M3. Поскольку рычаг требует большого крутящего момента, чтобы справиться с весом рычага использовались металлические редукторы с высоким крутящим моментом. Нижние 5 сервоприводов (поворотный стол, плечо (x2), локоть и запястье) представляют собой сервоприводы SAVOX SC-0252MG, которые создают крутящий момент 10,5 кг / см при 6 вольтах. Сервопривод на запястье – стандартные сервоприводы Fubata S3003, которые производят около 3,5 кг / см. Все серво (кроме поворота запястья) имеют металлическую шестерню и двойной металлический подшипник, что обеспечивает их физическую прочность, так как рычаг будет оказывать на них большое давление.
После установки в кронштейны сервоприводов их затем соединяются с кронштейнами C. На одной стороне установлена крестообразная сервоголовка, поставляемой с сервоприводом. Они обрезаются по размеру, а затем привинчиваются болтами на места. С другой стороны кронштейна фланцевый подшипник крепится к 8-миллиметровому отверстию, которое затем прикручивается болтами через кронштейн с помощью винта М3 и нейлоновой гайки, чтобы предотвратить отвинчивание гайки при вращении. Если винт М3 немного длиннее, то можете использовать 2-3 шайбы М3 на внешней стороне кронштейна чтобы убедиться, что он не врезается в заднюю часть сервопривода.

Подшипники имеют внутренний диаметр 4 мм, наружный 8 мм и толщину 3 мм. Подшипники эти фланцевые, они имеют небольшую металлическую кромку на одной стороне, которая предотвращает их проталкивание через кронштейн. Этот тип подшипников довольно распространен в моделях автомобилей с дистанционным управлением и может быть приобретен либо в специальном магазине, либо на Алиэкспрессе. Всего имеется 4 подшипника, 3 в кронштейне и один в концевом захвате.
Построение захвата
Конструкция концевого захвата основана на двух вращающихся в противоположных направлениях зубчатых колесах, которые используют рычаги, чтобы открывать и закрывать захваты в поперечном направлении. Это позволяет использовать в конструкции относительно небольшие детали, но при этом открытое отверстие составляет около 65 мм, а значит рука может поднимать довольно широкие предметы. Самая большая проблема – это шестерни. Довольно трудно найти подходящие механизмы. В конце концов решено было использовать 20-мм шестерни Лего конструктора, который можно легко найти в любом магазине игрушек.
- Первый шаг – просверлить два отверстия диаметром 3 мм с каждой стороны детали. На шестеренках этих были две удобные маркировки пресс-формы.
- Далее надо использовать небольшие боковые ножи, чтобы снять внутреннюю ступицу детали. Это дело должно быть удалено чтобы позволить шестерне быть прикрепленной к конечному прихвату на более позднем этапе.
- Затем, чтобы закрепить зубчатое колесо на сервоприводе и на втором креплении зубчатого колеса, необходимо просверлить две сервоголовки, чтобы размеры соответствовали деталям от Лего. Позже они прикрепляются болтами.
Для создания прихвата нужно будет распечатать CAD-шаблон для деталей и вырезать их из алюминия. Для деталей использовался пруток размером 60 мм x 1000 мм x 4 мм и вырезались куски, используя комбинацию торцовочной пилы, лобзика и напильника для придания им формы. Как только части нарезаны, распечатайте шаблон САПР и приклейте их к деталям (так же, как при изготовлении скоб). Затем детали подвергаются кернению и сверлению.

Начните с обрезки кронштейна сервопривода. Для данного серво использовался DGServo S05NF, который небольшой и легкий, но все же имеет металлическую шестереночную передачу и высокий крутящий момент. Сервопривод крепится к кронштейну с помощью 2-х винтов М3:

Далее отрежьте верхний кронштейн. Он должен иметь фланцевый подшипник протянутый через нижнюю сторону и два винта М3. Для каждого винта требуются 3 гайки, которые выступают в роли распорок для поднятия кронштейна от сервопривода:

Теперь соберите серво головку. Она состоит из шестерни, одной из просверленных ранее серво-головок и длинной рычажной части:

Далее идет другая передача и рычаг. Эта часть похожа на сервопривод, но имеет длинный болт М3, который служит в качестве оси. Чтобы предотвратить его проскальзывание в подшипнике (внутренний диаметр подшипника составляет 4 мм, а винт М3 – 3 мм), на винт длиной 3 мм надевается небольшое уплотнение:

Теперь прикрепите поворотную шестерню к верхнему кронштейну с помощью нейлоновой гайки, затем прикрепите верхний кронштейн к сервоприводу с помощью дополнительных 2-х гаек M3:

Соберите два коротких рычага, сервомеханизм и захватные рычаги, как показано на следующем рисунке. Обратите внимание, что тут добавлены две термоусадочные трубки к захватным рычагам, чтобы немного увеличить захват (они режутся и затем нагреваются на месте). Используйте нейлоновые гайки на точках поворота, полностью затяните их, а затем поверните винт назад на четверть или половину оборота, чтобы детали могли свободно перемещаться друг над другом:

Чтобы закончить захват, соедините верхние рычаги с нижними. Поскольку между ними есть промежуток, то можете использовать 5 или около того шайб. После этого прикрепите короткий L-образный кронштейн к задней части сборки. Теперь можете прикрепить концевой захват к робо-руке. Не забудьте прикрутить его к сервоприводу вращения запястья. Кронштейн уже достаточно поднят, чтобы могли вставить отвертку в головку сервопривода.
Управляющая роботом электроника
Чтобы максимально упростить сборку электронной части, была разработана схема управления на основе Arduino Leonardo (т.е. в качестве экрана, совместимого с Uno R3). Плата оснащена микроконтроллером ATmega32U4 AVR со встроенным USB. Это позволяет создать полностью USB-совместимое устройство без необходимости пайки дополнительных компонентов для монтажа.

Поскольку хотелось подать 6 В на сервоприводы (чтобы получить максимальный крутящий момент), пользовательский шилд просто подает Vin на серво. Регулятор LDO на Ардуино гарантирует, что остальная часть схемы получает постоянные 5 В. Проблема с сервоприводами для поделок (особенно сервомоторами с высоким крутящим моментом) заключается в том, что под нагрузкой потребление тока может быть довольно высоким. Тесты показывают максимальное потребление около 400 мА на сервопривод. Если учесть небольшой запас мощности (то есть 500 мА на сервопривод) и тот факт, что у нас 6 сервоприводов, то для выполнения этой работы источник питания должен иметь ток более 3 А. Здесь использовался регулируемый блок питания, который может выдавать 5 А при напряжении 6 Вольт, что более чем достаточно для работы манипулятора. Этот БП напрямую подключен к разъему питания Ардуино.
Поскольку сервоприводы напрямую подключены к Vin на Ардуино, вы не должны использовать блок питания расчитаный на напряжение выше 6 вольт. Это повредит серво!
Чтобы сделать проект как можно более универсальным, разместил на плате 7 разъемов серво выходов (по одному на каждый выход ШИМ Ардуино). то есть вы можете использовать плату для любого проекта, требующего от 1 до 7 сервоприводов. Кроме того, добавлен один светодиод для индикации состояния и заголовок JTAG (он позволяет более гибко программировать и отлаживать прошивку, если у вас есть JTAG-программатор).
Сборка шилда сервоуправления
На следующем рисунке показана нижняя сторона печатной платы до того, как она была просверлена и заполнена деталями:

Поскольку сервоприводы могут быть очень шумными в плане питания, на силовых шинах стоят конденсаторы 10 мкФ, чтобы помочь справиться с пиковыми нагрузками серво при запуске. Также имеется конденсатор емкостью 100 нФ на разъеме JTAG, для облегчения разъединения силовых шин.
Вот изображение готового блока, подключенного к 7-ми тестовым сервоприводам во время разработки программы:

В итоге проверялась механика руки робота используя стандартную систему радиоуправления RC, чтобы убедиться что все движется правильно и сервоприводы могут справиться с нагрузкой руки. Как показали испытания, полностью работает сервоуправление, и оно достаточное для того, чтобы действительно управлять рукой. Программа сервопривода работает с контролем скорости вращения – увеличение и уменьшение скорости вращения сервопривода, которое необходимо будет для работы манипулятора.
Схема и дизайн печатной платы доступны для скачивания всем пользователям сайта Электрические Схемы.