Скалярное управление электродвигателем
Отношение В/Гц вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения В/Гц мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.

На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
В применении к асинхронным двигателям
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.

При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения [2].

Когда используется
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
СДПМ со скалярным методом управления может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для контроля СДПМ на низких оборотах для приложений, требующих высокую динамику [1].
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
AVR495: Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и векторного ШИМ-управления
В предыдущих рекомендациях по применению [AVR494] описывалась реализация устройства управления асинхронным электродвигателем с обратной связью по скорости на основе микроконтроллера AT90PWM3 с использованием принципа постоянства отношения напряжение-частота (правило Костенко) и обычной широтно-импульсной модуляции (ШИМ). Использование метода векторного ШИМ-управления вместо обычного ШИМ-управления позволяет более экономично расходовать энергию и улучшить переходные процессы. Целью данных рекомендаций по применению является демонстрация возможности реализации данного более требовательного к вычислительным способностям способа управления на основе того же микроконтроллера AT90PWM3.
3. Ключевые особенности AT90PWM3
Алгоритмы управления реализованы на микроконтроллере AT90PWM3, представляющий собой недорогой и экономичный однокристальный микроконтроллер, достигающий производительности до 16 миллионов инструкций в секунду. Он предназначен для выполнения функций управления в понижающих/повышающих преобразователях постоянного напряжения, синхронными электрическими машинами на основе постоянных магнитов, трехфазными асинхронными электродвигателями и бесколлекторными электродвигателями постоянного тока. Микроконтроллер интегрирует:
- Микроконтроллер на основе 8-разрядного ядра AVR с прогрессивной архитектурой RISC (ядро похоже на ATmega 88)
- 8 кбайт внутрисистемно-программируемой флэш-памяти
- 512 байт статического ОЗУ для хранения переменных и таблиц соответствия, используемых прикладной программой
- 512 байт ЭСППЗУ для хранения конфигурационных данных и таблиц соответствия
- Один 8-разрядный таймер и один 16-разрядный таймер
- 6 ШИМ-каналов, оптимизированные под полумостовую топологию силовой схемы управления
- 11-канальный 10-разрядный АЦП и 10-разрядный ЦАП
- 3 встроенных компаратора
- Программируемый сторожевой таймер со встроенным генератором
4. Принцип действия
4.1 Принцип пространственно-векторной модуляции
Рисунок 4.1 — Типичная структура инверторного асинхронного привода
На рисунке 4.1 показана типичная структура трехфазного асинхронного электродвигателя, подключенного к инвертору напряжения. Поскольку электродвигатель рассматривается как равномерная нагрузка с изолированной нейтралью, то Vn=(Va+Vb+Vc)/3, Van=Va-Vn=(Vab-Vca)/3, Vbn=Vb-Vn=(Vbc-Vab)/3, а Vcn=Vc-Vn=(Vca-Vbc)/3. Поскольку верхние силовые ключи могут находиться только во включенном или отключенном состоянии и, при этом, соответствующие нижние ключи могут находиться только в противоположном состоянии (паузами неперекрытия в данном случае пренебрегаем), то всего возможно восемь состояний силовой схемы управления, как показано на рисунке 4.2. Шесть из них приводят к формированию ненулевых фазных напряжений, а два смениваемых состояния приводят к формированию нулевых фазных напряжений. Если применить преобразование Concordia [1,2], то шесть ненулевых фазных напряжений будут представлять вершины шестиугольника (см. рисунок 4.3).
Как показано на рисунке 4.3, угол между ненулевыми напряжениями всегда равен 60 градусов. В комплексной форме данные ненулевые фазные напряжения могут быть записаны в виде Vk=Ee j(k-1)n/3 , где k = 1..6 и V0= V7=0В. В таблице 4.1 представлены линейные и фазные напряжения для каждой из 8 возможных конфигураций инвертора.
Рисунок 4.3 — Представление восьми возможных конфигураций инвертора в системе координат Concordia
Таблица 4.1. Состояния ключей инвертора и его выходные напряжения
Таблица 4.2. Выражения коэффициентов заполнения импульсов для каждого сектора
В системе координат Concordia любое статорное напряжение Vs=V a +j·V b = Vsm cos( q )+j·Vsm sin( q ) попадает вовнутрь одного из секторов шестиугольника и может быть выражено как линейное сочетание двух ненулевых фазных напряжений, которые определяют границы данного сектора: Vs=dk· Vk+dk+1·Vk+1. Приравнивая dk ·Vk+dk+1 ·Vk+1 к Vsm cos( q )+j·Vsm sin( q ) получаем выражения коэффициентов заполнения импульсов для каждого сектора, которые представлены в таблице 4.2. Поскольку инвертор не может мгновенно генерировать напряжение Vs, то принцип векторного ШИМ-управления заключается в генерации напряжения с периодичностью Ts, среднее значение которого равно Vs, что достигается путем генерации напряжения Vk в течение Tk= dk·T s и Vk+1 в течение Tk+1= dk+1·Ts. Поскольку dk+ dk+1 1 данные напряжения должны завершиться в течение периода коммутации Ts напряжением V0 и/или V7. Возможно несколько вариантов решений [3,4], у которых минимизация общих гармонических искажений статорного тока выполняется за счет приложения напряжений V0 и V7 одинаковой длительности T0= T7= (1 — dk — dk+1)Ts/2. Напряжение V0 эквивалентно приложенному напряжению в начале и в конце периода коммутации, а V7 — прикладывается по середине периода коммутации. В верхней части рисунка 4.4 приведены осциллограммы для сектора 1.
4.2 Эффективность реализации векторного ШИМ-управления
В таблице 4.2 показано, что выражения для коэффициентов заполнения импульсов имеют различный вид в каждом секторе. При внимательном изучении данных выражений можно прийти к выводу, что, т.к. sin(x)= sin( p -x), то все коэффициенты заполнения импульсов могут быть записаны унифицированным способом: dk=2·Vsm ·sin( q «)/E· и dk+1=2· Vsm· sin( q ‘)/E·, где q «= p /3- q ‘ , а q ‘= q -(k-1) p /3. Поскольку данные выражения не зависят от номера сектора, то их можно обозначить da и db. Поскольку область значений q ‘ всегда находится в пределах 0… p /3, то при вычислении da и db необходима таблица синусов только для указанного интервала. Это существенно снижает объем памяти, требуемый для хранения таблицы синусов. AT90PWM3 содержит 3 контроллера силового каскада (PSC) для генерации импульсных сигналов, сформированных алгоритмом векторного управления.
Счетчики выполняют счет от нуля то значения, соответствующего половине периода коммутации (как показано в нижней части рисунка 4.4), а затем считает обратно до 0. Значения, которые необходимо сохранить в трех регистрах сравнения, показаны в таблице 4.3.
Рисунок 4.4 — Осциллограммы сигналов управления инвертором и соответствующие значения регистров сравнения
Таблица 4.3. Значения регистров сравнения в зависимости от номера сектора
4.3 Алгоритм определения сектора
Для определения сектора, к которому относится заданное напряжение статора Vs, в литературе предлагаются различные алгоритмы. Они, как правило, требуют множества арифметических операций и основаны на координатах напряжения Vs на плоскости Concordia или фазовом пространстве a-b-c. Когда данные значения определяются по принципу управления V/f модули напряжений статора Vsm вычисляются по правилу постоянства V/f, рассмотренного в предыдущих рекомендациях по применению, а фаза этих напряжений q определяется w s с помощью дискретно-временного интегратора. Для эффективной реализации данного алгоритма определения сектора необходимо манипулировать q ‘ и k, вместо q , в специальном интеграторе, как показано на рисунке 4.6. Номер сектора k является выходом счетчика по модулю 6, который активизируется при каждом достижении q ‘ значения p /3. При этом также выполняется ограничение области значений q ‘ в диапазоне между 0 и p /3 (см. рисунок 4.7).
Рисунок 4.5 — Алгоритм определения сектора
Рисунок 4.6 — Определение сектора
Результирующая блок-схема, представленная на рисунке 4.8, может использоваться для построения контура управления (рисунок 4.8), в котором разность между желаемой и измеренной скоростью поступает на вход ПИ-регулятора, в котором определяется частота статорного напряжения. Для снижения сложности контроллера в качестве исходных данных для вычисления правила V/f и алгоритма векторного ШИМ-управления используются абсолютные значения частоты статорного напряжения. Если на выходе ПИ-регулятора присутствует отрицательное значение, то содержимое двух переменных управления силовыми транзисторами инвертора обмениваются местами.
Рисунок 4.7 — Блок-схема векторного ШИМ-управления
Рисунок 4.8 — Блок-схема завершенной системы управления
5. Описание аппаратной части (ATAVRMC200)
Данные рекомендации по применению реализованы в составе оценочной платы ATAVRMC200. Данная плата может использоваться в качестве отправной точки для проектирования и проверки устройств управления асинхронными двигателями.
Основные особенности ATAVRMC200:
- Микроконтроллер AT90PWM3
- Управление асинхронным электродвигателем 110-230В
- Интеллектуальный силовой модуль (230В/400Вт)
- Интерфейс внутрисистемного программирования эмулятора
- Интерфейс RS232
- Изолированный ввод-вывод для датчиков
- Вход 0-10В для команд и датчика
6. Описание программы
Все алгоритмы написаны на языке Си, при этом, в качестве инструментальных средств для проектирования использовались IAR Embedded Workbench и AVR Studio. В алгоритме векторного ШИМ-управления используется таблица ближайших значений 127sin(2?k/480) для k= 0. 80. Размер этой таблицы (81 байт) является наилучшим соотношением между доступной внутренней памятью и частотой оцифровки скорости вращения ротора. При двунаправленном управлении скоростью при изменении направления вращения на обратное на выходе ПИ-регулятора устанавливается отрицательное значение. В этом случае необходимо обменять местами значения, сохраненные в двух компараторах (см. рисунок 4.8).
6.1 Описание проекта
Программное обеспечение доступно в виде присоединенного проекта с Вэб-сайта компании Atmel. Название проекта — Project_Vector. Проект с названием Project_Natural относится к рекомендациям по применению AVR494.
Таблица 6.1. Перечень файлов, используемых в проекте «Project_Vector» в среде для проектирования IAR
| Файл | Описание |
| main_space_vector_PWM.c | Основной верхний уровень приложения |
| space_vector_PWM2.c | Определение сектора и угла тетта |
| controlVF.c | Вычисление постоянного отношения V/F |
| mc_control.c | Контур управления (ПИ) |
| read_acquisitionADC.c | Возврат результата АЦП |
| init.c | Инициализация ЦПУ (порты ввода-вывода, таймеры) |
| psc_initialisation2.c | Инициализация PSC |
| adc.c | Функции АЦП |
| dac.c | Функции ЦАП |
6.2 Экспериментальная проверка
На рисунке 6.1 представлен переходной процесс изменения скорости и статорных напряжений, полученных при управлении микроконтроллером со скачкообразным изменением заданной скорости между значениями +700 и -700 об./мин. Данные экспериментальные результаты были получены при управлении асинхронным двигателем мощностью 750 Вт. Из рисунка следует, что желаемая скорость достигается по завершении переходного процесса длительностью 1.2 секунды, а затем, когда частота статора на выходе ПИ-регулятора приблизится к нулю, амплитуда статорного напряжения будет равна пороговому напряжению. Данный рисунок также демонстрирует, что при использовании векторного ШИМ-управления переходной процесс получается более гладкий, но и более длительный.
Рисунок 6.1 — Результаты измерения частоты вращения (об/мин) и фазного напряжения статора (В) при управлении микроконтроллером и скачкообразном изменении заданной частоты вращения
7. Задействованные ресурсы
Размер программного кода: 2584 байт Размер ОЗУ: 217 байт Загрузка ЦПУ: 33% на частоте 8 МГц
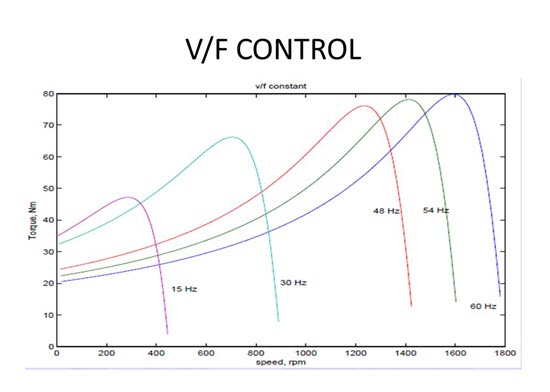
Overview about V/F Control Solution
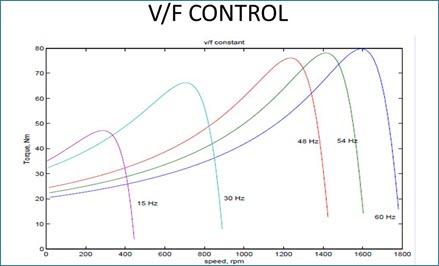
When it refers to electric motor control modes, V/F control algorithm is one of the basic control modes which is widely used in pump and fan system. In this post, we will introduce the control principle, application and more about VF control method.
1. Introduction about V/F Control
V/F is abbreviated from voltage/frequency. V/F control is an induction motor control method which ensures the output voltage proportional with the frequency, so it maintains a constant motor flux, preventing weak magnetic and magnetic saturation phenomenon from happening.
2. Control Principle
V/F control principle is to produce a circuit called voltage-controller oscillator with oscillator frequency. It is a voltage-dependent capacitance, when subjected to a change in voltage, its capacity will change, and then the change in capacity will cause changes in the oscillation frequency, resulting in variable frequency. This controlled frequency is used to control the frequency of the output voltage, in order to achieve speed changes of the controlled electric motors.
3. Applications of V/F Control
Asynchronous electric motor torque is a result of the interaction of flux and rotor flux. At a rated frequency, if voltage is set to a certain value and only reduce the frequency, then there will be large magnetic flux and magnetic circuit saturation (severely, it will burn motor). Therefore, the frequency and voltage must be changed proportionally. When changing the frequency, we should control the output voltage of AC drive, in order to keep constant flux and avoid weak magnetic and magnetic saturation phenomenon. This control method is commonly applied for fans and pumps.
4. Pros and Cons of V/F Control
Currently, most of the general purpose are using the V/F control method. The VFDs which are of V/F control usually features simple structure. But this kind of VFD adopts open-loop control, so it is difficult to achieve high control performance, moreover, at low frequency, it requires for torque compensation in order to change the low frequency torque characteristics.
The below image shows the motor control modes supported by Veichi AC70: V/F control and vector motor control mode:
V f control что это
This video describes the functioning of VFD or variable frequency drive. Other names for this are frequency converter, AC drive converter, etc. From the content:
Block diagramm of its main componentes and their function
Building the output signal by Pulse Width Modulation PWM
Building a 3 phase signal
Controlling torque and speed
Parameter Boost and ramp
Technical implementation of the DC/AC converter
The frequency converter allows both synchronous and asynchronous motors to be controlled steplessly in speed and torque.
The operating principle of the frequency converter is simple: First the AC voltage of the local power supply has to be rectified, This is followed by a smoothing of the pulsating DC voltage. After this you can convert this DC voltage into an AC of desired frequency and level:
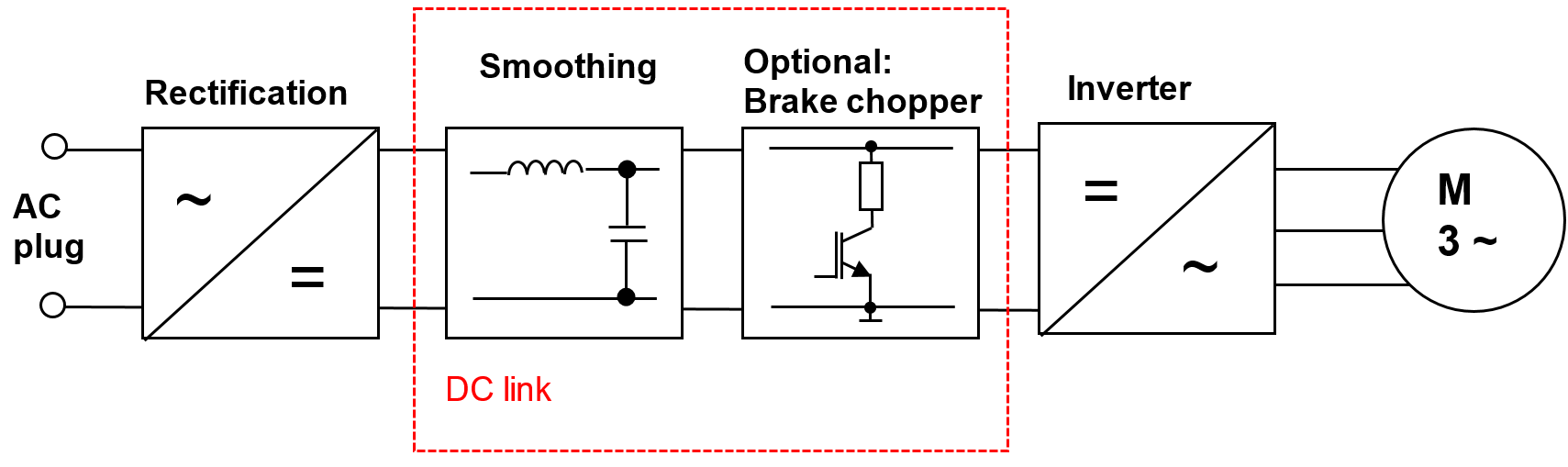
Structure of a VFD
Rectifier
Smaller frequency converters for less power can also be powered by a single-phase AC voltage. It is rectified by a bridge circuit. If the braking energy of the motor should be fed back into the power supply (keyword: regenerative braking), a fully controlled bridge rectifier B6C is used here.
Smoothing
The pulsating DC voltage is smoothed within the DC link by a buffer capacitor, also an inductance coil throttles strong current fluctuations.
Brake chopper
This module is optional and serves to dissipate the braking energy of the connected motor via a resistor.
Inverter
Furthermore, the already smoothed voltage from the DC link is converted into a three-phase voltage by an DC/AC inverter. More and more IGBTs are used for this function today.
INSTRUCTIONS FOR MAINTENANCE AND SERVICE
Due to the capacitors within the DC Link you still have high voltage after switching off the VFD. Qualified personnel must wait at least ten minutes before opening this device and check that the VFD is discharged.
Parameterization VFD
V/f control (vector control)
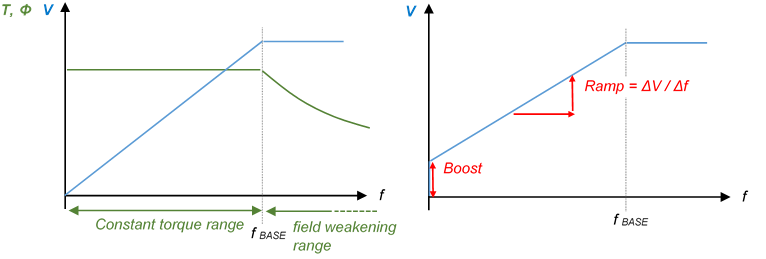
V/f control is the simplest method to control of a 3 phase asynchronous machine and is applied for drives with few dynamic drive requirements (such as belt drives, pumps, fans).
The purpose is to keep the engine torque constant. This is achieved with the parameter called «Ramp«: With increasing frequency, the impedance of the motor winding also increases. As a result, the motor current would decrease and thus also the magnetic flux Φ leading to less torque. To counteract this, the stator voltage is increased in proportion to the frequency.
The parameter «Boost» is to compensate the ohmic resistance of the motor winding especially at low frequencies, as well as to overcome the static friction:
87-Hz-operation with VFD:
To get higher speeds with constant torque the 87 Hz characteristic can be used. Smaller motors up to approx. 3 kW are usually switched to star on a 400 V supply voltage. The field weakening range starts at 50 Hz and the motor torque drops. If these motors are now connected to delta, the base frequency can be set to 87 Hz. Thereby the motor torque can be kept constant up to 87 Hz.
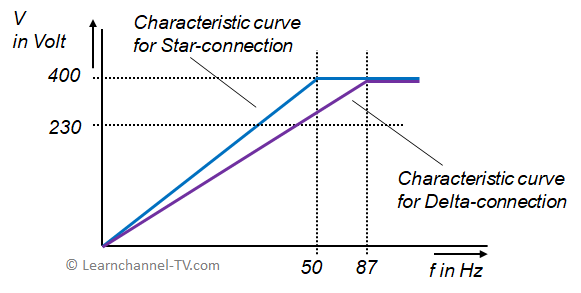
fig.: VFD operating in 87-Hz
What you can see: The characteristic curve for delta connection thus is flatter and reaches the maximum output voltage of 400 V of the inverter at 87 Hz. With this trick you can increase the output power, since the motor still delivers its rated torque at 87 Hz. However, the windings of the motor are under greater strain concerning insulation and the motor heats up more.