Как подключить частотный преобразователь
Параметр, определяющий значение частоты, при котором начинается вращение двигателя. Повышенная минимальная частота во многих случаях позволяет уменьшить нагрев двигателя при разгоне.
Нижний предел выходной частоты.
Этот параметр ограничивает частоту на выходе преобразователя. Нижний предел не может быть меньше минимальной выходной частоты. Данная настройка необходима для обеспечения защиты двигателя и механизмов в случае ошибочной установки минимальной рабочей частоты.
Максимальная выходная частота.
Параметр ограничивает выходную частоту сверху. Причем заданное (номинальное) значение частоты может быть меньше, либо равным максимальной выходной частоте. Данное значение используется для расчета теоретического времени разгона, а также привязывается к максимальному значению управляющих сигналов на аналоговых входах.
Частота максимального напряжения
(номинальная частота двигателя). Этот параметр задается в соответствии со значением, указанным на шильдике электродвигателя. Как правило, оно равно 50 Гц. При такой частоте на двигателе действует максимально возможное для данного преобразователя напряжение. Если данный параметр выставить меньше необходимого, то двигатель будет работать с перегрузкой и никогда не разгонится до номинальной частоты.
Время разгона.
Основной параметр, определяющий расчетное время, за которое электродвигатель разгонится от нулевой до максимальной выходной частоты. Темп нарастания, как правило, линейный, если не задано квадратичное изменение частоты. В случае, если нарастание задается в промежуточном диапазоне (не от нулевой и не до максимальной частоты), реальное время будет меньше заданного. Это обстоятельство нужно учитывать при проектировании оборудования.
Например, если минимальная выходная частота равна нулю, а максимальная – 50 Гц, то при установке времени разгона 10 сек и максимальной выходной частоте 25 Гц фактическое время разгона будет в 2 раза меньше, т.е. 5 сек. То же относится и к торможению.
Задача настройки
Настройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.

На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
Советуем изучить — Фазоповоротные трансформаторы и их использование
А вот и приемлемые кривые:

Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Далее поговорим о том, как подобрать коэффициенты для достижения оптимального регулирования. Рекомендуется настраивать коэффициенты в том же порядке, в котором это описано.
Инерция нагрузки
На реальное время разгона и замедления также влияют различные механические и электрические параметры системы электропривода. Например, при установке очень малого времени разгона или торможения фактическое время может быть больше из-за инерции нагрузки на валу двигателя.
Инерция нагрузки при разгоне может привести к перегрузке по току, при этом преобразователь частоты выходит в ошибку. Чтобы такого не произошло, время разгона нужно выбирать по нескольким критериям. Если данный параметр не принципиален, можно выставить автоматический разгон. В этом случае преобразователь будет выбирать максимальный скоростной режим разгона или замедления, чтобы избежать ошибки перегрузки по току (разгон) или перенапряжению на звене постоянного тока (замедление).
Когда время торможения должно быть минимальным, применяют тормозные резисторы для выделения «лишней» энергии, полученной в результате торможения.
Дополнительная инерция при разгоне и торможении может проявляться также при аналоговом способе задания выходной частоты. Это происходит, когда на аналоговом входе устанавливается низкочастотный фильтр для уменьшения помех, либо в настройках выставлена большая инерционность задающего аналогового сигнала.
Производители рекомендуют ограничить число пусков/остановов двигателя в единицу времени, поскольку при разгоне и торможении происходит наибольшая тепловая нагрузка на частотный преобразователь.
Во многих ПЧ имеется несколько вариантов времени разгона и торможения, которые можно применить для различных этапов технологического процесса. Переключение производится посредством подачи сигнала на соответственно запрограммированный дискретный вход.
Настройка, создание программы и установка преобразователя
Настройка механизма
Эта процедура включает в себя настройки значений:
- Источник команд управления.
- Команда задания частоты от источника.
Другие настройки даны в подробном описании к документам на частотный преобразователь.
Настройка: источник команд управления
Под этими командами считают:
- Пуск (RUN).
- Стоп (STOP).
- Вперед (FWD).
- Назад (REV).
Управляющие данные из источников (по настройкам значения 2.01):
- 2.01= 0 – Панель управляющая в корпусе (клавиатура) частотника (по умолчанию).
- 2.01= 1 — Наружные сигналы, имеющие разрешение встроенной кнопки «STOP».
- 2.01= 2 — Наружные сигналы, запрещающие встроенной кнопки «STOP».
- 2.01= 3 – Вид программы передающих RS-485, разрешающий кнопки «STOP».
- 2.01= 4 – Вид программы передающих RS-485, запрещающий кнопки «STOP».
У многих видов частотников имеются источники команд, переключающиеся по программируемому дискретному входу. В серии VFD-VE источник команд управления изменяется клавишей PU, у серии VFD-C2000 клавишей HAND на встроенной панели управления.
Для первоначальной настройки нужно определить основной источник сообщения управляющих команд. Если это будет встроенная управляющая панель, то настройка закончена.
Для подсоединения наружных сигналов сообщения можно выбирать два варианта: активная или неактивная клавиша STOP на панели.
Параметры на примере преобразователя Prostar PR6100
В частотном преобразователе Prostar PR6100 параметры настройки разгона/торможения находятся в меню и имеют следующие обозначения:
- Р0.06 – верхний предел частоты
- Р0.07 – нижний предел частоты
- Р0.14 – время разгона
- Р0.15 – время торможения
- Р1.03 – номинальная частота двигателя
Другие полезные материалы:
Использование тормозных резисторов с ПЧ Назначение сетевых и моторных дросселей Настройка преобразователя частоты для работы на несколько двигателей Назначение и виды энкодеров











Примеры использования PID-регуляторов
Преобразователь частоты HVAC
Пример использования как внутренних, так и внешних PID-регуляторов для системы подготовки воздуха:

Управление кондиционированием воздуха с помощью встроенных PID-регуляторов частотника AS3 Toshiba
На представленной схеме вентилирования помещения показан процесс охлаждения воздуха с помощью водовоздушного теплообменника. Водяной контур служит для циркуляции холодной воды через теплообменник с помощью насоса.
PID-регуляторы PID1 и PID2 управляют вентилятором для обеспечения заданного расхода и, в критических случаях, для обеспечения заданной температуры воздуха. Например, при больших отрицательных температурах воздуха расходом можно пренебречь, достигая вторым регулятором улучшенного прогрева воздуха за счет более медленного его движения через нагреватель.
PID-регулятор PID3 по аналоговому каналу управляет насосом водяного контура для поддержания заданного давления. PID-регулятор PID4 может управлять другими вспомогательными системами (на схеме не показаны).
Компания СПИК СЗМА, как единственный официальный дилер Toshiba, предлагает купить для решения задач управление насосами, вентиляторами и станками частотники серии VF-AS3 по доступной цене. Вы получаете максимально качественную техническую поддержку и гарантию долгой работы преобразователя частоты.
Как подсоединить управляющие сигналы (клавиши, выключатели, клеммы)?
Рабочим сигнальным положением является Земля. Когда мы включаем Землю на дискретный вход, то команда активируется. Это контакты, подсоединяем ее выключателю, клеммы наружных реле, клавиши с фиксированием в 2-проводном управлении, или обычные клавиши без фиксирования в трехпроводном управлении.
Бывает нужно иметь уровень активности управляющего сигнала, который закреплен не к Земле, а к положительной клемме питания двигателя, для активирования команды можно не нулем, а уровнем команды логики. Это получается перестраиванием режимов при помощи сообщения переключателя малого размера, который встроен в управляющую плату частотника. Расположение микропереключателя выясняется в документации к частотнику. Сигнал Sink говорит нам, что сигналом активности выходит Земля, а сигнал Source, что положительная клемма сети. У всех видов частотников имеется встроенный источник напряжения задания управляющих команд входами, с контактами.
Всякая коммутация может происходить только при отсоединенном двигателе напряжении питания сети 220в частотника.
Подключение наружных клавишей для управления:
Управление с двумя проводами SINK.
Управление с тремя проводами SINK.
У некоторых видов преобразователей с 2021 года название контактов управления для команд изменены. Уточненную схему подсоединения для вариантов с двумя или тремя проводами частотника можно увидеть в документации к оборудованию.
Остается сделать настройку при определении управляющих команд двигателя сообщения: указать частотнику вид схемы для управления мы будем коммутировать.
В частотниках VFD-EL или VFD-Е настраиваются значения 04.04. — выбираем 2-х или 3-х проводную схему управления для входов MI1, MI2. Его параметры следующие:
- 04. 04 = 0 2-х проводная схема: FWD/STOP, REV/STOP (заводские режимы настройки).
- 04. 04 = 1 2-х проводная схема: FWD/REV, RUN/STOP.
- 04. 04 = 2 3-х проводная схема: (кнопки RUN и STOP без фиксирования).
Для VFD-G, VFD-F, VFD-B за настройку отвечает значение 2.05 в конце кода с такими же параметрами.
VFD-C2000 – за опцию значение 2.00 с теми же параметрами.
VFD-VE – настраивается значение 2.00 в конце кода, его величина другая, добавлены виды с блокированием автоматического старта.
Во время настраивания выполните сначала физические подсоединения (при выключенном напряжении сети 220в), затем можно производить режим настройки значений. Можно производить эти манипуляции в обратной последовательности. Не надо забывать про безопасные приемы, какие действия произойдут после пуска.
БЫСТРЫЙ СТАРТ! ПОПУЛЯРНЫЕ ВАРИАНТЫ НАСТРОЙКИ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ M-DRIVER!
Данная статья предназначена для быстрой настройки и запуска частотных преобразователей M-Driver в различных режимах управления. Прежде всего, в данном обзоре мы рассмотрим простые и более востребованные варианты конфигурации частотных преобразователей M-Driver. В описании режимов управления будут кратко описаны параметры и необходимые значения для правильной работы частотных преобразователей в заданному режиме. Если Вам необходимо более детально изучить представленные в статье параметры, то Вы всегда можете скачать подробное руководство пользователя. Для описания режимов работы частотных преобразователей мы будем использовать серию M300, так как она более простая и обладает меньшим функционалом по сравнению с серией M500 (при этом решения из данной статьи применимы к серии M500).
 Первым действием Вам необходимо подключить силовые кабельные линии к частотному преобразователю:
Первым действием Вам необходимо подключить силовые кабельные линии к частотному преобразователю:
- если артикул ЧП заканчивается на G1, то питание преобразователя 220В Вам необходимо подключить на клеммы R и T, фазировка в данном случае не играет роли;
- если артикул ЧП заканчивается на G3, то питание преобразователя 380В (3 фазы) Вам необходимо подключить на клеммы R,S,T;
- кабельные линии от двигателя подключаем к клеммам U,V,W частотного преобразователя.
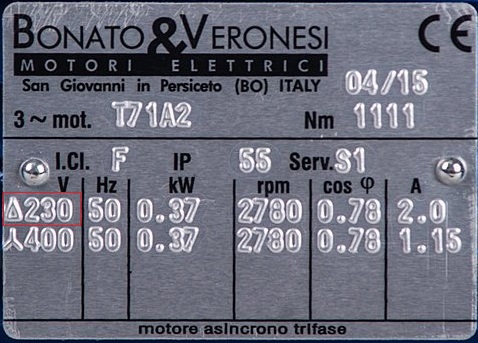
Необходимо понимать, что частотные преобразователи с входным напряжением 220В (1 фаза) возможно подключать только к двигателям, у которых имеется возможность подключение в Δ 220В. Данный параметр можно посмотреть на шильдике двигателя.
После подключения и подачи напряжения на частотный преобразователь M-Driver загорается панель управления, и Вам необходимо произвести настройку частотного преобразователя. Обязательно первым этапом настройки Вам нужно ввести параметры двигателя в частотный преобразователь. Для это нажимаем кнопку PRGM и стрелочками верх/вниз выбираем группу параметров P1 и нажимаем кнопку ENT. После этого мы попадаем в подменю группы P1, где требуется внести изменения параметров двигателя (смотрим их на шильдике двигателя):
- P1-01 указываем мощность двигателя, кВт;
- P1-02 указывает номинальное напряжение двигателя, В (как правило это 220В или 380В);
- P1-03 номинальный ток двигателя, Ампер;
- P1-04 номинальная частота двигателя, Гц (как правило 50Гц);
- P1-05 скорость вращения двигателя, об/мин.
Эти параметры вводятся ОБЯЗАТЕЛЬНО в любой конфигурации управления частотным преобразователем! При игнорировании ввода данных параметров, частотный преобразователь может выйти из строя.
Далее рассмотрим настройки и схемы подключений различных режимов управления частотного преобразователя.
1. Заводской режим . После ввода пяти параметров (P1-01 — P1-05) частотный преобразователь готов к работе в ручном режиме. Нажимая кнопку RUN (Пуск) на панели управления, частотный преобразователь будет разгонять двигатель до выбранной Вами частоты. Частота двигателя в данном случае задается с встроенного потенциометра на панели (черное колесико), тем самым Вы регулируете скорость вращения двигателя вращая потенциометр. При нажатии кнопки STOP частотный преобразователь плавно остановит двигатель. В заводской настройки время разгона и останова двигателя составляет 20 секунд. Если Вам нужно ускорить время разгона или останова, то Вам необходимо изменить параметры P0-17 (время разгона) и P0-18 (время останова).
2. Запуск двигателя вперед или назад с помощью переключателя (с фиксацией), управление частотой с внешнего потенциометра. Для настройки данного режима управления нам понадобиться:
- установить характеристики двигателя в параметры P1-01 — P1-05 частотного преобразователя;
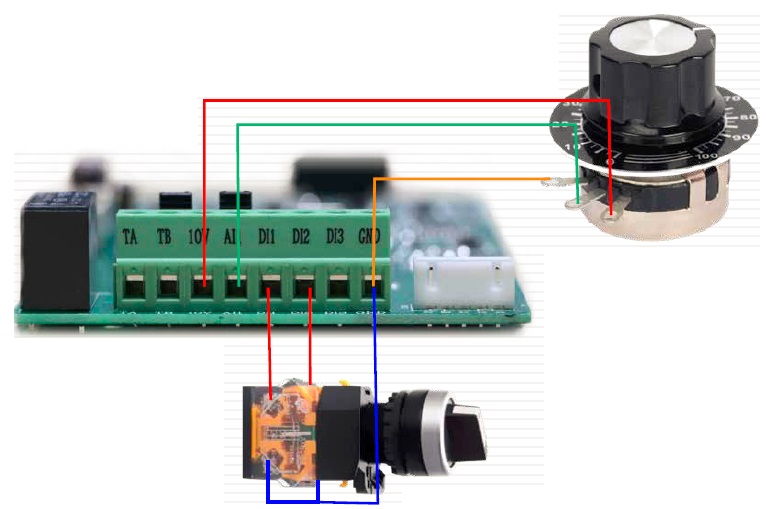
- выбрать в параметре P0-02 = 1 (управление с клемм ЧП);
- выбрать в параметре P4-11 = 0 (двухпроводное управление, заводское значение);
- выбрать в параметре P4-00 = 1 (движение вперед, клемма DI1);
- выбрать в параметре P4-01 = 2 (движение назад, клемма DI2);
- при необходимости отрегулировать время разгона и торможение в параметрах P0-17 и P0-18 соответственно;
- в параметре P0-03 указываем значение источника задания частоты. Если хотим задавать частоту с потенциометра на панели частотного преобразователя, то оставляем значение 4, если хотим устанавливать частоту с внешнего потенциометра, то указываем значение 2.
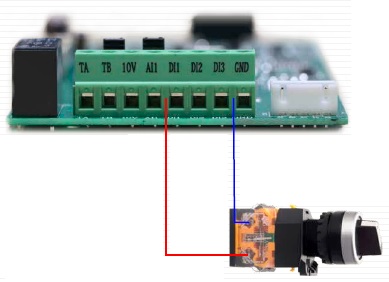
В таком случае нужно подключить провод с клеммы COM на переключатель и в зависимости от поворота переключателя сигнал будет подаваться на клемму DI1 или DI2. Переключатель желательно использовать на 3 положения, когда нейтральное положение, контакты переключателя не замыкаются и соответственно двигатель не работает. Если Вы подключаете внешний потенциометр для задания частоты, то необходимо производить подключение на клеммы 10V AI1 GND как показано на рисунке.
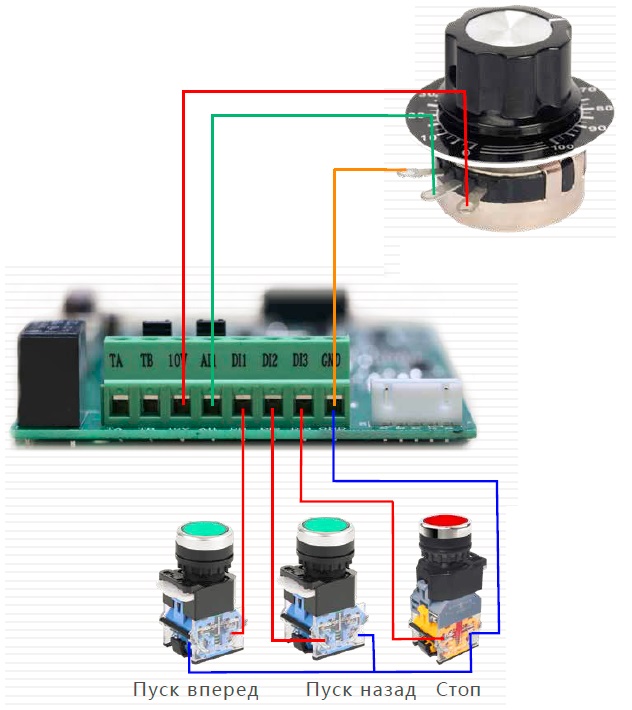 3. Запуск двигателя вперед или назад с помощью кнопок (без фиксации), управление частотой с внешнего потенциометра. Для настройки данного режима управления нам понадобиться:
3. Запуск двигателя вперед или назад с помощью кнопок (без фиксации), управление частотой с внешнего потенциометра. Для настройки данного режима управления нам понадобиться:
- установить характеристики двигателя в параметры P1-01 — P1-05 частотного преобразователя;
- выбрать в параметре P0-02 = 1 (управление с клемм ЧП);
- выбрать в параметре P4-11 = 2 (трехпроводное управление);
- выбрать в параметре P4-00 = 1 (движение вперед, клемма DI1);
- выбрать в параметре P4-01 = 2 (движение назад, клемма DI2);
- выбрать в параметре P4-02 = 3 (трехпроводное управление);
- при необходимости отрегулировать время разгона и торможение в параметрах P0-17 и P0-18 соответственно;
- в параметре P0-03 указываем значение источника задания частоты. Если хотим задавать частоту с потенциометра на панели частотного преобразователя, то оставляем значение 4, если хотим устанавливать частоту с внешнего потенциометра, то указываем значение 2.
В таком случае нужно подключить провод с клеммы COM на кнопки с нормально разомкнутым контактом и в зависимости от нажатия одной из кнопок (без фиксации) подключенных к входам DI1 и DI2, двигатель будет двигаться вперед или назад. При этом нужно понимать, что кнопка СТОП должна иметь нормально закрытый контакт и должна быть подключена к входу DI3. Также сигнал DI3 можно задействовать на аварийный останов двигателя или для реле сухого хода.
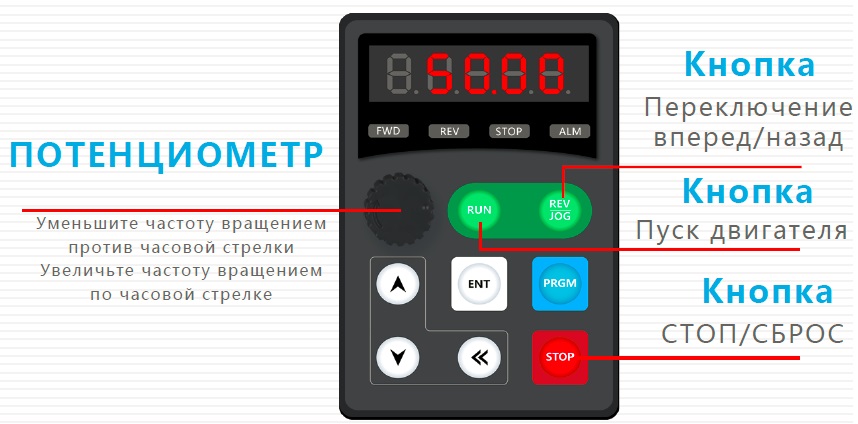
4. Запуск двигателя вперед или назад с панели управления, регулирование частоты с внутреннего потенциометра. Для настройки данного режима управления нам понадобиться:
- установить характеристики двигателя в параметры P1-01 — P1-05 частотного преобразователя;
- выбрать в параметре P7-01 = 2 (переключение вращения двигателя вперед/назад по кнопке REV/JOG на панели управления);
- при необходимости отрегулировать время разгона и торможение в параметрах P0-17 и P0-18 соответственно.
В таком режиме управление двигателем происходит с панели управления ЧП, нажимая кнопку RUN происходит запуск двигателя. При нажатии кнопки REV/JOG происходит переключение вращения двигателя. Кнопка STOP отвечает за останов двигателя. С помощью встроенного потенциометра происходит регулирование скорости двигателем.
5. Запуск двигателя вперед с помощью переключателя или кнопки с фиксацией , регулирование частоты с внутреннего или внешнего потенциометра. Для настройки данного режима управления нам понадобиться:
 установить характеристики двигателя в параметры P1-01 — P1-05 частотного преобразователя;
установить характеристики двигателя в параметры P1-01 — P1-05 частотного преобразователя;- выбрать в параметре P0-02 = 1 (управление с клемм ЧП);
- выбрать в параметре P4-00 = 1 (движение вперед, клемма DI1, заводское значение);
- при необходимости отрегулировать время разгона и торможение в параметрах P0-17 и P0-18 соответственно;
- в параметре P0-03 указываем значение источника задания частоты. Если хотим задавать частоту с потенциометра на панели частотного преобразователя, то оставляем значение 4, если хотим устанавливать частоту с внешнего потенциометра, то указываем значение 2.
В таком случае нужно подключить провод с клеммы COM на переключатель и в зависимости от поворота переключателя сигнал будет подаваться на клемму DI1. Переключатель желательно использовать на 2 положения с нормально открытым контактом. Если Вы подключаете внешний потенциометр для задания частоты, то необходимо производить подключение на клеммы 10V AI1 GND как показано на рисунке.
Настройка частотного преобразователя
В статье рассмотрим параметры для программирования преобразователя частоты, дадим пошаговую инструкцию по его настройке.

Настройка частотного преобразователя – это важная задача, которую необходимо произвести правильно, для обеспечения оптимальной работы электродвигателя и четкого внедрения в технологический процесс. При этом масштаб программирования зависит как от самого электропривода, так и от функций, которые он выполняет.
Для чего нужна настройка частотного преобразователя
После того как все электрические подключения выполнены, для ввода в эксплуатацию требуется настроить преобразователь частоты. Процесс заключается в четырех основных пунктах, это:
- Настройка параметров электродвигателя – необходима для того, чтобы ПЧ адаптировался к конкретному двигателю.
- Внесение параметров для пуска и останова двигателя – от этих настроек зависит время пуска и останова двигателя, а также режим управления.
- Ввод защитных и ограничивающих уставок – на этом этапе определяется граничные значения различных параметров для защиты двигателя и самого частотника от выхода их из строя.
- Программирование дополнительных функций – это самый объемный и непостоянный пункт, так как в каждой конкретной задаче будут использоваться свои функции.
Правильное выполнение всех этапов программирования ПЧ позволит электродвигателю функционировать в оптимальном и безопасном режиме, защитит его от выхода из строя.
Интернет-магазин приводной техники
Программируемые параметры частотника
Каждая конкретная модель частотника имеет свой функционал, который напрямую влияет на количество настроек устройства. При этом не все параметры требуют программирования, а часто являются лишь дополнительной функцией.
Используя вышеописанную классификацию, опишем основные настраиваемые параметры ПЧ:
- Номинальные характеристики электродвигателя – находятся на шильдике мотора:
- Напряжение;
- Частота;
- Скорость;
- Мощность;
- Значение cos φ – не является обязательным;
- Крутящий момент – не является обязательным.
- Команда пуска/останова – откуда будет происходить запуск ПЧ;
- Время разгона или кривая разгона – за какое время двигатель должен выйти на заданную скорость вращения;
- Время торможения или кривая торможения – за какое время на двигатель должна прекратиться подача питающего напряжения.
- Минимальные и максимальные значения частоты, скорости, крутящего момента, тока;
- Тепловая защита двигателя;
- Время работы при увеличенном или уменьшенном напряжении;
- Защита от обратного пуска.
- ПИД регуляторы;
- Передача данных;
- Настройка аналоговых и дискретных выходов;
- Различные режимы работы.
Этапы программирования и настройки частотного преобразователя
Выделим минимальный набор действий по настройке параметров преобразователя частоты:
- Ввод паспортных данных электродвигателя в ПЧ;
- Ввод принципа регулирования:
- Постоянная частота;
- Переменная частота – если выбран этот вариант, то требуется указать источник задания скорости вращения.
- Задать канал управления – то есть источник, откуда будет приходить команда запуска и останова.
После выполнения данных действий двигатель можно запустить, при этом следует убедиться в правильности вращения. Если вращение осуществляется неправильно, это можно изменить переключением фазных проводов или с помощью настройки частотного преобразователя.
Программирование частотных преобразователей на примере Innovert
Разберем пример настройки частотного преобразователя на примере устройства от Innovert. У рассматриваемого частотника имеются следующие группы настраиваемых параметров:
№ Группа Функции 1 A (Рr.A) для текущего контроля 2 B (Pr.B) основные функции 3 C (Рr.C) для основных применений 4 D (Pr.d) параметры входов и выходов 5 E (Рr.E) вспомогательные настройки 6 F(Pr.F) для прикладного использования 7 G (Рr.G) для ПИД-регулятора 8 H (Pr.H) настройки последовательного канала связи 9 i (Рr.i) для усложнённого применения Чтобы осуществить базовое программирование преобразователя частоты, необходимо произвести следующее действия:
1. В п. Pr.b.00 (уставка рабочей частоты) указываем нужное нам значение характеристики. По умолчанию стоит 50 Гц. В данном случае оставляем его без изменения.
2. В п. Pr.b.01 (способ установки заданной скорости вращения) выставляем величину 4. При этом увеличение и уменьшение характеристики будет происходить с помощью внешних контактов «Up» и «Down».
3. В п. Pr.b.02 (способ пуска) вводим показатель 1. При этом пуск будет происходить с помощью управляемого входа.
4. В п. Pr.b.03 (режим доступа к кнопке «стоп» на панели частотника) указываем значение 1. Это позволит останавливать частотный преобразователь с его панели управления.
5. В п. Pr.b.04 (блокировка обратного вращения) вводим величину 1. То есть разрешаем обратное вращение.
6. В п. Pr.b.05 (максимальная рабочая частота) указываем номинальное значение электродвигателя 50 Гц. Это не позволит увеличить скорость вращения двигателя выше 50 Гц.
7. Далее необходимо настроить:
- Минимальную рабочую частоту Рr.b.06 – сохраняем по умолчанию 0 Гц;
- Время ускорения Pr.b.07 – указываем нужное значение, например 3 секунда;
- Время замедления Рr.b.08 – выставляем необходимое значение, например 3 секунда;
- V/F кривая: Максимальное напряжение Pr.b.09 – вводим 220 В;
- V/F кривая: Опорную частоту Pr.b.10 – оставляем 50 Гц;
- V/F кривая: Промежуточное напряжение Pr.b.11 – вводим величину 17;
- V/F кривая: Промежуточная скорость вращения Рr.b.12 – сохраняем значение 2.5;
- V/F кривая: Минимальное напряжение Pr.b.13 – вводим величину 15;
- V/F кривая: Минимальная частота Рr.b.14 – оставляем заводское значение;
- Несущая частота Pr.b.15 – указываем величину 9.
8. Остальные показатели мы оставляем с заводскими уставками.
В итоге получаем частотник, запускающий двигатель от дистанционных кнопок «пуск» и «стоп», которые коммутируют соответствующие цепи управления устройства. Управление скоростью вращения происходит с помощью кнопок «быстрее» и «медленнее», которые коммутируют контакты «Up» и «Down» преобразователя. При этом значение частоты не может быть поднято выше 50 Гц.
Для того чтобы наглядно увидеть процесс настройки и запуска электродвигателя от ПЧ Innovert, вы можете посмотреть видео:
Настройка частотного преобразователя
Программирование – технологическая операция, предшествующая вводу в эксплуатацию любого частотника, вне зависимости от того, для выполнения каких процессов он используется, какие системы и устройства обслуживает. Из-за сложности комплекса его не удастся применять по стандартной схеме “подключил-забыл”. Посредством корректных настроек удается достичь эффективного функционирования асинхронных двигателей. Своевременных и правильных реакций на отклонения от нормативных рабочих показателей, аварийные, потенциально опасные ситуации.
Да, некоторые модели частотников изначально почти на 100% подготовлены к установке в силовую систему, однако, речь идет, в большей степени, о бытовых версиях невысокой производительности, ориентированных, к примеру, на одиночные насосные, вентиляционные модули. Более того, даже в такой ситуации пользователю придется вручную зафиксировать паспортные характеристики электродвигателя, характеристики обратной связи, например, объем теплоносителя в резервуаре-накопителе или скорость воздушных потоков в вентиляционных шахтах.
Для частотных преобразователей промышленного типа настройка – важнейшая операция при вводе в строй, причем она должна выполняться с максимальной точностью. Даже небольшие отклонения приведут к тому, что комплекс будет функционировать с просадками по производительности, не удастся достичь желаемого КПД, сильно увеличится риск аварии.

Программирование частотного преобразователя: когда оно необходимо?
Без настройки не обойтись в следующих ситуациях:
- Монтаж нового электромотора, находящегося под управлением преобразователя. Технологические манипуляции проводятся перед первым стартом привода, а также при финальных корректировках.
- Замена электропривода или его капитальное восстановление. Режим работы оборудования в таком случае меняются, вероятны отклонения обновленных параметров от тех, что указаны в техническом паспорте. Соответственно, скорректировать характеристики преобразователя необходимо с учетом этой информации.
- Изменения структуры комплекса, главным модулем которого является частотник. Под структурными изменениями понимаются и корректировки технологических показателей, и добавление новой техники.

Настраиваемые характеристики
В первую очередь, необходимо настроить и обозначить следующие показатели:
- Эксплуатационные режимы электромотора (среднее число активаций и деактиваций, запусков на реверсивном ходу в течение определенного временного промежутка).
- Оптимальное время разгона, динамического торможения мотора.
- Предельная эксплуатационная частота привода.
- Лимит силы тока. Эта характеристика указывается в процентном соотношении от номинала.
- Условия старта привода при поступлении сетевого напряжения.
- Автоматизированный управляющий алгоритм, являющийся базой в работе регулирующей системы.
- Особенности устранения ошибок, из-за которых электропривод может быть остановлен.
Обязательно фиксируются функции дискретных и аналоговых входов частотников. Особенности этих модулей следующие:
- Дискретные используются для установления надежной связи с реле, станциями клавишного управления и иным двухпозиционным оборудованием. При определении конфигурации допустимо присвоение каждой клавише определенного частотного показателя.
- Аналоговые блоки классифицируются по показателю сигнала, от 0 до 10 В и от 4 до 20 мА. В первом случае, они необходимы для того, чтобы наладить стабильную связь с потенциометрами, задача которых – плавная корректировка частотного значения. Токовые разъемы ориентированы на установку скоростных датчиков, электроники, фиксирующей позицию приводного вала и определенные рабочие характеристики.
Стадии и особенности настройки частотного преобразователя
Перед тем, как начать настройку частотных преобразователей, нужно проверить, что все подключения корректны и выполнены в соответствии со схемой. Дальнейший этап – подача питания, сброс устройства до базовых заводских характеристик. Выполнить эту манипуляцию можно определенной командой или нажатие кнопки сброса, которая перезагрузит преобразователь. В дальнейшем, при настройке частотника нужно скорректировать все имеющиеся разделы:
- Set. Здесь нужно обозначить допустимые рабочие частотные диапазоны, временные показатели разгона и торможения, характеристики срабатывания интегрированных защит.
- drC. Паспортные параметры электрического привода, обозначение регулировочных показателей.
- I-O. Обозначение выходных и входных контактных групп. В процессе настройки следует зафиксировать значения, оптимальные для синхронизации с датчиками.
- CtL. Корректировка каналов управления, фиксация уровней доступа.
- FUn. Этот раздел позволяет обозначить действия частотного преобразователя в соответствии с определенными событиями. Фиксация характеристик ПИД-регулирования, определение позиции приводного вала, активации электромагнитных блоков торможения, скоростных интервалов.
- FLt. Пункт, определяющий действия частотного преобразователя в аварийных ситуациях, при отклонениях от нормативных рабочих значений.
- COM. Здесь нужно определить наиболее эффективные и быстрые протоколы информационного обмена с удаленным управляющим, контролирующим оборудованием.
- SUP. Пункт, отображающий внутренние показатели преобразователя и закрепленные в памяти параметры.

Пример программирования частотных преобразователей
В целом, при изменении настроек действуют универсальные схемы. Небольшие отличия в алгоритмах присутствуют, они зависят от конкретной модификации техники. Общий алгоритм выглядит следующим образом:
- Указание паспортных показателей электропривода, активация функции автоматической подстройки показателей под необходимые значения.
- Задействование режима “Hand On”, запуск мотора, проверка корректности вращения приводного вала.
- Активация режима корректировки частоты. Нужно убедиться, что скорость вращения вала меняется вместе с частотой.
- Обозначение скоростного диапазона электропривода на основе его показателей и особенностей всей техники, подключенной к нему.
- Обозначение схемы управления, чтобы сигналы от вспомогательных модулей и датчиков своевременно обрабатывались системой.
- Указание настроек регулировки ПИД.
- Окончательное внесение настроек в память ПЧ.
Современные преобразователи реагируют на некорректные действия пользователя. При указании неправильных параметров, электромотор попросту не запускается, на табло выводится предупреждающее оповещение. Аналогично, техника предупреждает о некорректности подключений, в таком случае нужно провести проверку, убедиться, что плотность контакта достаточна, на контактных группах нет загрязнений или повреждений, препятствующих нормальному прохождению сигналов.
При небольших отклонениях настроек, например, когда не удается добиться точной и оперативной отзывчивости привода на изменение частоты, рекомендовано провести все операции повторно, до достижения оптимального результата.