2.4 Определение времени переходного процесса
Одной из задач анализа электронной схемы может быть расчёт времени переходного процесса, т.е. времени, в течение которого схема входит в установившийся режим при разовом или периодическом возмущении входным сигналом.
Под установившимся процессом понимается такое состояние схемы, при котором токи и напряжения в её ветвях либо неизменны, либо меняются периодически. Любое другое состояние схемы называется переходным. Если входное (возмущающее) воздействие исследуемой схемы периодическое (с периодом T = 2 π ω 0 ), то установившийся процесс будет характеризоваться периодиче-
ским изменением токов и напряжений. Условие периодичности записывается так:
где Х — вектор переменных состояния (или любых других величин).
Т.о., определение времени переходного процесса сводится к нахождению минимального значения времени t , которое бы удовлетворяло условию (40).
© А. Кудинов, 2006, ТГУ, каф.ПЭ
Это и будет время переходного процесса. Имея массив вычисленных значений Х i в заданные моменты времени t i , искать время переходного процесса будем по схеме:
Шаг 1. Зададимся погрешностью ε , положим i = 0. Шаг 2. Положим j = i .
Шаг 3. Пока t j < t i + T , увеличиваем j на единицу.
Шаг 4. Если X j − X i ≤ ε , закончить ( t i — искомое время).
Шаг 5. Положим i = i + 1 и перейдём к шагу 2.
Некоторое неудобство этой схемы заключается в том, что период Т может оказаться не кратным шагу интегрирования (особенно при автоматическом его выборе), поэтому добиться равенства t j = t i + T не удаётся. В этих случаях, в
программной реализации описанной выше схемы необходимо предусмотреть процедуру интерполяции X j пред его сравнением с X i (между шагом 3 и 4).
2.5 Гармонический анализ сигналов
Известно, что периодическую функцию f ( t ) с периодом Т точно или приближённо можно представить тригонометрической суммой
Перерегулирование и время переходного процесса
В режиме просмотра графика необходимо щелкнуть на режим "=" для показа на графике перерегулирования и времени переходного процесса. При подведении к линии графика дополнительно выводится в числовом виде значение перерегулирования (O, %) и времени переходного процесса (Tp, с).

Определение перерегулирования и времени переходного процесса в продукте MATLAB Simulink
В MATLAB Simulink необходимо задать вход и выход исследуемой системы и запустить инструмент линейного анализа. Эта процедура подробно рассмотрена на странице "Анализ: годограф Найквиста и Михайлова, ЛАЧХ и ЛФЧХ".
После запуска линеаризации выбирается режим графика "Step" и далее на рисунке вызывается меню путем нажатия правой кнопки мыши. В меню "Characteristics" выбираются подпункты меню "Peak Response" и "Setting Time".

Для вывода текстовой информации о значениях показателей необходимо щелкнуть левой кнопкой мыши по отмеченным на графике точкам.
Показатели, определяемые по виду переходной характеристики
Показатели качества имеет смысл изучать только для работоспособных, т. е. устойчивых систем. Для сравнения качества функционирования разных систем или разных вариантов одной системы разработаны числовые показатели, характеризующие системы с той или иной точки зрения. Показатели качества линейных непрерывных систем подразделяются на две группы:
1. Показатели, характеризующие динамику переходного процесса. К ним относят показатели запасов устойчивости и быстродействия систем.
2. Показатели, характеризующие, точность системы. Чаще всего к ним относят характеристики регулярных и случайных составляющих ошибок в установившемся режиме работы системы.
Переходная характеристика – это реакция системы на единичный скачок (см. (2.20)).
Она характеризует качество переходного процесса и позволяет определить прямые показатели качества системы. Основными показателями, определяемыми по ее виду (см. рис.2.28), являются:
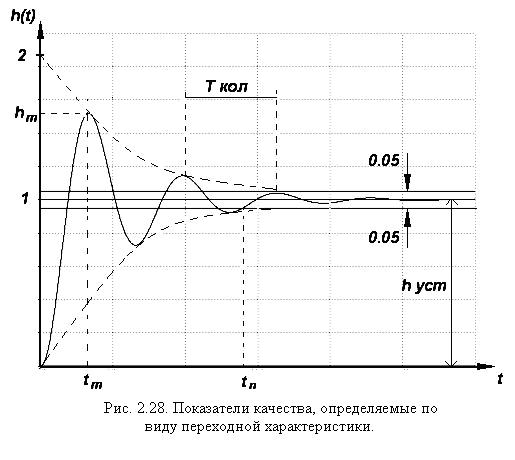
a). Время переходного процесса t п ( или время регулирования). Это важнейший показатель, характеризующий быстродействие системы. Для его определения на графике характеристики проводят две прямые, параллельные оси 0 t, отстоящие от установившегося значения h уст на величину 0,05 h уст в ту и другую сторону (трубка 5%). t п – это момент времени, когда переходная характеристика входит в трубку 5% и больше из нее не выходит.
b). Перерегулирование
Переходный процесс имеет апериодический или колебательный характер. Для систем радиоавтоматики он в большей степени имеет колебательный характер. Для инерционных систем уровень колебательности ограничивают, для электронных систем радиоавтоматики колебательность допускается, но ее приходится ограничивать, так как она является косвенной характеристикой запаса устойчивости системы. По переходной характеристике колебательность определяется по величине перерегулирования σ (см. формулу (2.77)).
Перерегулирование σ характеризует степень удаления системы от колебательной границы устойчивости (в случае нахождения системы на колебательной границы устойчивости в системе наблюдаются незатухающие колебания и σ = 100%). Запас устойчивости считается достаточным, если . Иногда допускается перерегулирование до 70%, а в ряде случаев не допускается вообще (для инерционных систем).
c). Число колебаний r за время переходного процесса. Этот показатель колебательности исключительно легко определяется по виду переходной характеристики. Допустимое число колебаний обычно не более ,для слабо колебательных систем – меньше одного колебания. Зная период колебаний переходной характеристики по величине r нетрудно (хотя и приближенно) определить время переходного процесса .
Таким образом, по виду переходной характеристики можно определить следующие показатели качества системы:
· Время переходного процесса tп;
· Перерегулирование ;
· Число колебаний r за время переходного процесса.
2.7.2. Показатели, определяемые по виду частотных характеристик
Косвенные методы анализа динамики линейных непрерывных систем основаны на применении частотных характеристик. Для определения показателей качества системы в замкнутом состоянии используется амплитудно – частотная характеристика системы в замкнутом состоянии и две частотные характеристики комплексного коэффициента передачи системы в разомкнутом состоянии (подробно эти характеристики описаны в разделе 2.3.3).
· Амплитудно – частотная характеристика системы в замкнутом состоянии .
· Амплитудно – фазовая характеристика (АФХ).
· Логарифмические частотные характеристики (ЛАХ).
2.7.2.1. Показатели качества, определяемые по виду амплитудно – частотной характеристики системы в замкнутом состоянии .
Передаточная функция системы в замкнутом состоянии представляется формулой (2.61)
Следовательно, комплексный коэффициент передачи системы в замкнутом состоянии имеет вид
Модуль этого комплексного коэффициента и естьамплитудно – частотная характеристика системы в замкнутом состоянии (рис. 2.29).
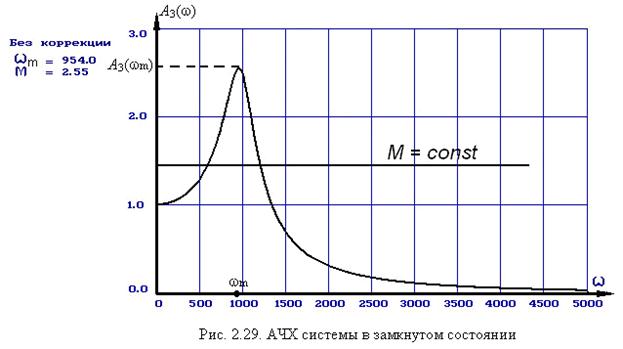
Если переходная характеристика системы имеет апериодический характер, то . – невозрастающая функция частоты ω, если колебательный – то функция . имеет максимум. В том случае, когда система находится на колебательной границе устойчивости (незатухающие колебания переходной характеристики постоянной амплитуды) величина этого максимума стремится к бесконечности, а функция . имеет разрыв. Таким образом, чем больше максимальное значение , тем меньше запас устойчивости системы.
Косвенной характеристикой запаса устойчивости и уровня колебательности системы служит показатель колебательности
представляющего собой отношение максимального значения амплитудно-частотной характеристики системы в замкнутом состоянии к значению этой характеристики при ω = 0. Для астатических систем A з(0)=1, для статических A з (0) = , при . Таким образом, = .
Используя рассматриваемую характеристику, быстродействие системы можно оценить по величине полосы пропускания ∆ω. Это — значение частоты ω, когда = 0,7. Чем шире полоса пропускания ∆ω, тем выше быстродействие системы.
При M >> 1 резонансная частота ωm приближается к частоте колебаний переходной характеристики, таким образом, период колебаний переходной характеристики равен . По величине показателя колебательности M можно определить число колебаний r переходного процесса и оценить время переходного процесса .
Приближенные соотношения, определяющие зависимость между параметрами систем не выше четвертого порядка приведены в табл. 2.4.
| σ | M | r | |
| Слабоколебательная система | <15% | <1,2 | <1 |
| Среднеколебательная система | 1530% | 1,21,7 | 12 |
| Сильноколебательная система | 3050% | 1,72,5 | 34 |
Итак, по виду амплитудно – частотной характеристики системы в замкнутом состоянии можно определить следующие показатели динамики системы:
· показатель колебательности M;
· полосу пропускания ∆ω;
· резонансную частоту ω m
· период колебаний переходной характеристики ;
· число колебаний r переходного процесса;
· оценить время переходного процесса .
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Длительность переходного процесса
Практически считается, что переходный процесс заканчивается за четыре постоянных времени (4 ), .
Через время равное :
| Рис 1.25 |
Свободная функция через время равное составляет 1.8% от первоначального значения, т.е. уменьшается в .
Определяемая ею переходная функция, будет составлять от установившейся величины.
Поэтому считают, что время переходного процесса равно: .
5.В цепи порядка постоянные времени различны для каждой экспоненты. Длительность переходного процесса оценивается по наибольшей постоянной времени. Для комплексно-сопряженных корней характеристического уравнения постоянная времени определяется по действительной их части .
Переходный процесс в цепи первого порядка
1.Если цепь описывается уравнением первого порядка, то свободная составляющая имеет одну слагаемую экспоненту, и полное решение:
Для определения единственной постоянной интегрирования нужны только начальные значения функций .
2.Определим постоянную интегрирования в общем виде.Для этого в решение подставим начальные условия :
отсюда следует, что:
Постоянная интегрирования для любой функции в цепи первого порядка равна начальному значению ее свободной составляющей.
3.Содержание расчета переходного процесса в цепи первого порядка.
Для составления решения рассматривается ряд задач, в результате чего определяются все компоненты искомой функции.
| Рис.1.26 |
4.Для иллюстрации характера переходного процесса в цепи первого порядка рассмотрим два элементарных примера с одноконтурными схемами при постоянном и синусоидальном источниках.
Пример 1: Включение цепи на постоянное напряжение .
Конденсатор предварительно зарядим до напряжения .
| Рис. 1.27 |
Характеристическое уравнение и его корень:
Полное решение для напряжения :
Ток из дифференциальной связи :
Анализ решения: Деформация процесса в зависимости от начальных условий (рис. 1.28).
| Рис. 1.28 |
| Рис. 1.29 |
В цепи с постоянными источниками , а для — экспонента. Значит, переходная функция представляет собой кривую, которая от значения монотонно и асимптотически приближается к новому установившемуся режиму . Это обстоятельство позволяет качественно представить переходный процесс, для чего необходимо рассчитать только старый установившийся режим, начальные условия и новый установившийся режим (рис. 1.29).
Пример 2: Включение нагрузки на синусоидальное напряжение.
Характеристическое уравнение и его корень: ; .
Напряжение на индуктивности найдем из дифференциальной связи:
Анализ решения: Деформация процесса в зависимости от момента включения источника и соотношения параметров.
| Рис. 1.31 |
На синусоидальный ток нового установившегося режима накладывается свободная экспонента (рис. 1.31), начальное значение которой определяется двумя независящими друг от друга факторами. С одной стороны это начальная фаза , зависящая от момента включения. Это случайный фактор. С другой стороны это угол сдвига фаз нового установившегося режима, зависящим от соотношения параметров схемы. Теми же параметрами определяется и постоянная времени , от которой зависит скорость установления принужденного режима. В какие-то моменты максимальное значение тока может превышать амплитуду . Его называют ударным значением .
Два крайних случая (рис. 1.32).
В одном крайнем случае, когда и , постоянная интегрирования превращается в нуль, переходный процесс будет отсутствовать и сразу после включения наступит новый установившийся режим: .
На левом рисунке сохранены параметры, угол сдвига остался тем же, что и в первом варианте, где рассматривался общий случай. Изменен только момент включения.
На правом рисунке представлен вариант, приближенный к другому крайнему случаю. Соотношение параметров таково, что
угол приближен к , что затягивает затухание свободной функции вследствие увеличения постоянной времени . Момент включения подобран так, чтобы и . Тогда максимально возможное начальное значение свободной функции за полпериода практически не затухает и ударное значение тока приближается к двойному амплитудному значению. Таким образом: .
Среднестатистическое отношение наблюдается в пределах от 1,3 в низковольтовых до 1,8 в высоковольтовых цепях.
| Рис. 1.32 |
5.Далее изложенный материал иллюстрируется решением нескольких задач по расчету переходного процесса в цепи первого порядка.
Примеры решения задач в цепи
Первого порядка.
Задача 1. Цепь с постоянным источником ЭДС (рис.1.33).
| Рис. 1.33 |
Определить мгновенные значения токов, напряжение на катушке и сопротивлении .