I²C — Inter-Integrated Circuit, краткое руководсто
I²C (и-квадрат-це, ай-ту-си, ай-сквэрд-си), Inter-Integrated Circuit — последовательная шина обмена данными между интегральными схемами. Изобретена и в начале 80-х компанией Philips Semiconductor (теперь NXP), передача данных осуществляется по двум проводам в обе стороны. Ведущий и ведомый могут выполнять как роль приёмника, так и передатчика. Для возможности соединения более двух устройств используются адресация. Опрашивать адреса шины может только ведущий. Адрес последовательно выводится на линию SDA сразу после сигнала Start. В этой статье речь пойдёт только о 7-ми битной адресации, так же не будет затронута тема нескольких ведущих. На каждом устройстве, поддерживающем I²C обычно обозначены два вывода: SDA и SCL. SDA (serial data) — означает последовательные данные, SCL (serial clock) — последовательное тактирование. Эти выводы являются выводами открытого коллектора или открытого стока, это означает что ведущий и ведомый могут только притягивать электрический потенциал к земле, поэтому на каждой линии должны быть подтягивающие резисторы. Сопротивление резисторов рассчитывается в зависимости от паразитной ёмкости линии.
Подключение:
Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины.
I²C на Arduino
Arduino UNO R3/Piranha UNO
На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset.
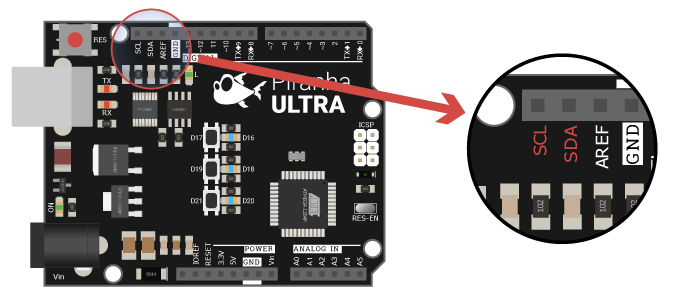
Piranha ULTRA
На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL
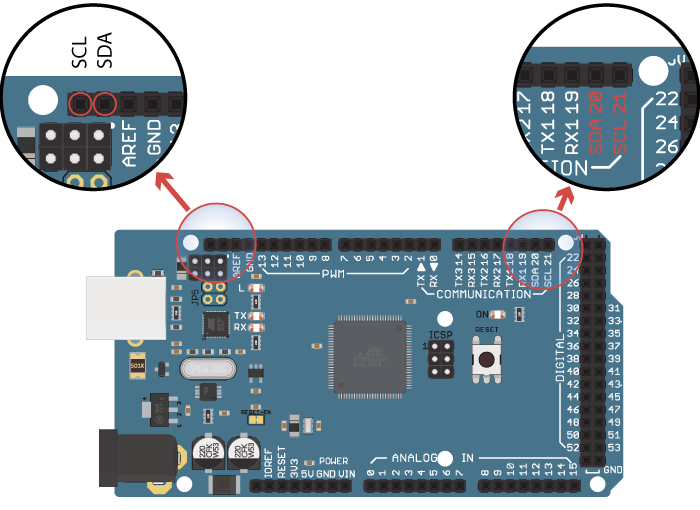
Arduino MEGA R3
На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены.
Примеры для Arduino
Работа с шиной с использованием встроенной библиотеки Wire Arduino IDE на примере Trema-модуля LED Матрицы 8×8 — i2c
В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке.
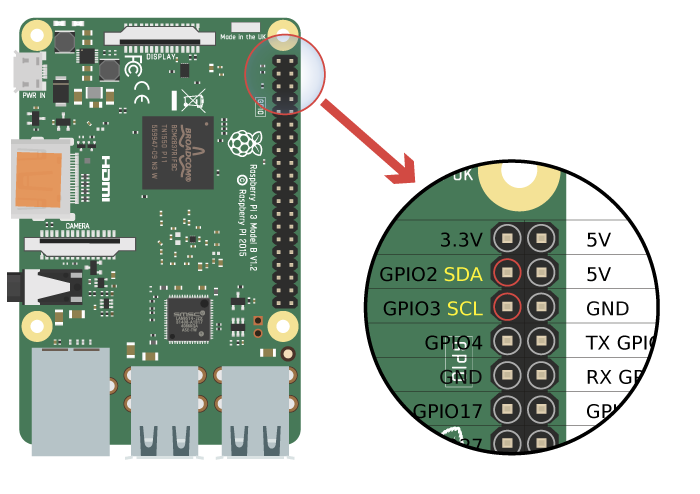
I²C на Raspberry Pi
На Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi.
Примеры для Raspberry
Работа с шиной с использованием модуля smbus для Python на примере Trema-модуля Матрицы 8×8 — i2c. Для работы с шиной её необходимо включить в настройках Raspberry при помощи утилиты raspi-config . Ссылка на подробное описание как это сделать.
Так же как и в примере с Arduino, в этом примере на матрицу выводится изображение стрелки. Стоит заметить, к Trema-модулю LED Матрица 8×8 — i2c написана библиотека с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке
Подробнее о шине I²C:
Резисторы, ёмкость и длина линий шины
В официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий.
При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях.
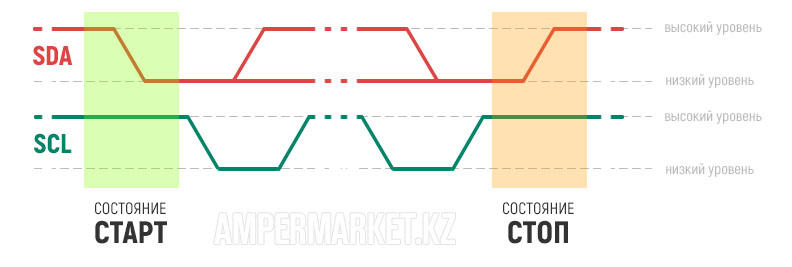
Сигналы и специальные биты шины
В состоянии покоя линии шины находятся на верхнем потенциале (обычно 3,3 В или 5 В, но могут быть и другие напряжения). Бездействие устройства, по умолчанию, воспринимается как логическая 1. Для простоты понимания можно рассмотреть аналогию: Вообразим верхний потенциал как уровень воды, а нижний как дно. Представьте, что Вы на рыбалке — попловок в состоянии покоя остаётся на поверхности, когда клюёт — идёт ко дну. Так же и в здесь, при обмене данными линии прижимаются в нулевому потециалу. Далее рассмотрим поочереди сингалы и специальные биты.
Устанавливаемые только ведущим
- Start — сигнал начала обмена данными. Линия тактирования SCL отпущена (логическая 1), ведущий пижимает линию данных SDA (переход из логической 1 в логический 0). После этого обмен данными происходит побайтово. Первый байт — семь бит адреса ведомого и бит направления (запись или чтение). Последующие байты — данные. после этого сигнала шина считается занятой.
Краткое обозначание сигнала S — заглавная буква S латинского алфавита.
- Бит Read — Если ведущий желает получить данные, он устанавливает логическую 1 сразу после адреса, информируя ведомого о том, что данные будут считываться (управление линией данных передаётся ведомому).
Краткое обозначание R — заглавная буква R латинского алфавита.
- Бит Write — Если ведущий желает записать данные, он устанавливает логический 0 сразу после адреса для информирования ведомого о том что данные будут записываться (управление линией данных остаётся у ведущего).
Краткое обозначение W̅ — заглавная буква W латинского алфавита с чертой сверху.
- Stop — сигнал окончания обмена данными. Ведущий прекращат тактирование, линия тактирования SCL отпущена (логическая 1), линия данных SDA переведена ведущим из логического 0 в логическую 1. После этого сигнала шина считается свободной.
Краткое обозначение P — заглавная буква P латинского алфавита.
- Restart — сигнал продолжения обмена данными (используется взамен сигналу Stop с последующим Start для продолжения опрашивания шины ). Используется в основном при наличии нескольких ведущих на шине, чтобы управление не перешло другому ведущему после сигнала Stop. Линия тактирования SCL отпущена ведущим, линия данных SDA переведена ведущим из логической 1 в логический 0.
Обозначается Sr — заглавная буква S и строчная буква r латинского алфавита.
Устанавливаемые ведущим и ведомым
Данные биты может устанавливат как ведущий, так и ведомый. В такой ситуации устанавливающее устройство или модуль (ведущий или ведомый) называют передатчиком, а считывающее устройство — приёмником.
- Бит ACK — (сокращ. англ. acknowledged — подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была прижата приёмником (логический 0) — принятые данные верны, передача может быть продолжена или закончена.
Обозначается A — заглавная буква A латинского алфавита
- Бит NACK — (сокращ. англ. not acknowledged — не подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была отпущена принимающим или принимающего нет на шине (логическая 1) — принятые данные неверны, произошла ошибка, передача не может быть продолжена. Обозначается A̅ — заглавная буква A латинского алфавита с чертой сверху.
Обмен данными
При обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования.
Рассмотрим пример простого обмена данными:
Запись в регистры ведомого. Данные взяты из примеров, приведённых выше.
После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый.
Вот так сигналы этого примера выглядят на осциллографе:
- Канал 1 — тактирование (SCL)
- Канал 3 — данные (SDA)
- Линия B1 — декодирование данных осциллографом
Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13.
После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop.
Скорость
Первоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости.
Inter-Integrated Circuits — I2C Basics (Part 1)
![]()
In this post, we will discuss all the theoretical concepts that you need to know regarding I2C before programming/testing it on real devices.
This will be a 3 part series Inter-Integrated Circuits — I2C Basics and Inter-Integrated Circuits — I2C Basics (Part 2) and Inter-Integrated Circuits — I2C Basics (Part 3)
Inter-Integrated Circuit (I2C)
As the name suggests, Inter-IC (or the Inter-Integrated Circuit), often shortened as I2C (pronounced eye-two-see), I2C (pronounced eye-squared-see), or IIC, was developed as a communication protocol to interact between different ICs on a motherboard, a simple internal bus system. It is a revolutionary technology developed by Philips Semiconductor (now NXP Semiconductors) in 1982, and is used to connect low speed peripherals (like keyboard, mouse, memory, IO/serial/parallel ports, etc.) to the motherboard (containing the CPU) operating at much higher speed.
These days you can find a lot of devices which are I2C compatible manufactured by a variety of companies (like Intel, TI, Freescale, STMicroelectronics, etc). Somewhere around the mid-1990s, Intel devised the SMBus protocol, a subset of I2C with strict protocols. Most modern day I2C devices support both, I2C and SMBus with little reconfiguration.
I2C Bus Interface
The most compelling thing about the I2C interface is that the devices are hooked up to the I2C bus with just two pins (and hence it is sometimes referred to as Two Wire Interface, or the TWI). Well of course, we do need two more pins for Vcc and ground, but that goes without saying.
As you can see in the above diagram (taken from eeweb.com), all the devices are hooked up to the same I2C bus with just two pins. These devices could be the CPU, or IO devices, or ADC, or any other device which supports the I2C protocol. All the devices connected to the bus are classified as either being Master or Slave (just like SPI). We will discuss about it in a little while.
For now, let’s get to know more about the bus itself. The I2C bus consists of two bidirectional “open-drain” lines — SDA and SCL — pulled up with resistors as shown below.
Serial Data Line (SDA)
The Serial Data Line (SDA) is the data line (of course!). All the data transfer among the devices takes place through this line.
Serial Clock Line (SCL)
The Serial Clock Line (SCL) is the serial clock (obviously!). I2C is a synchronous protocol, and hence, SCL is used to synchronize all the devices and the data transfer together. We’ll learn how it works a little later in this post.
Open-Drain Lines
A little while ago (just above the previous image), I mentioned that SDA and SCL are open-drain (also called open-collector) lines pulled up with resistors. What does that mean? It means that the devices connected to the I2C bus are capable of pulling any of these two lines low, but they cannot drive them high. If any of the devices would ever want to drive the lines high, they would simply need to let go of that line, and it would be driven high by the pull up resistors (R1 and R2 in the previous image, or Rp in the next image).
For those who are interested, let’s have a closer look. Others, please skip this section and go to the next to next section (voltage levels and resistor values).
In the above image, you can clearly see the NMOS transistors inside the devices. In order for the device to pull any of the two lines low, it needs to provide a high voltage to the gate of the transistor (that’s how an NMOS transistor operates, right?). If the gate voltage is low, the NMOS transistor is not activated and the corresponding line is driven high.
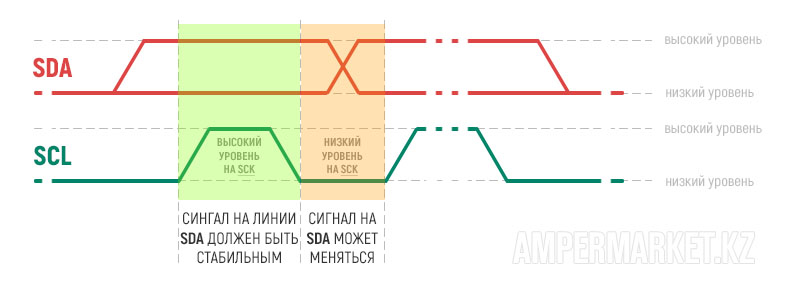
I2C Data Validity
For the data to be valid on the SDA line, it must not change while the SCL is high. The data on the SDA line should change only and only when the SCL line goes low. If this standard is not followed, the data transfer becomes flawed, in which case it becomes a start/stop sequence (discussed later in this post). The following image illustrates the same.
Voltage Levels and Resistor Values
I2C supports a wide range of voltage levels, hence you can provide +5 volts, or +3.3 volts as Vcc easily, and other lower/higher voltages as well. This gives us a wide range of choices for the values of the pull-up resistors (R1 and R2). Anything within the range of 1k to 47k should be fine, however values lower than 10k are usually preferred.
Master and Slave
The concept of Master and Slave in I2C is quite similar to that of SPI. Just like SPI, all the devices are either Master or Slave. Master is the device which initiates the transfer and drives the clock line SCL. On a single I2C bus, there are usually multiple Slaves connected to a single Master.
However, just like SPI, we can also have multiple Masters connected to the same I2C bus. Since we want our lives to be a little simpler, we usually avoid such cases, but however I2C supports multi-bus master collision detection and arbitration for such cases (doesn’t make sense? Let’s forget about it for now!).
Speed
I2C supports serial 8-bit bi-directional data transfers up to a speed of 100 kbps, which is the standard clock speed of SCL. However, I2C can also operate at higher speeds — Fast Mode (400 kbps) and High Speed Mode (3.4 Mbps). Most of the devices are built to operate up to speeds of 100 kbps (remember that we discussed that I2C is used to connect low-speed devices?).
I2C Bus Transaction
Alright, now that we are familiar with the I2C bus interface, let’s look into how the data transfer actually takes place through that interface. I2C supports unidirectional as well as bidirectional data transfer as mentioned below. We will discuss about them in detail towards the end of the post.
- Unidirectional Data Transfer
- Master-transmitter to Slave-receiver (Case 1)
- Slave-transmitter to Master-receiver (Case 2)
- Bidirectional Data Transfer
- Master to Slave and Slave to Master (Case 3)
Start/Stop Sequence
In order for the Master to start talking to the Slave(s), it must notify the Slave(s) about it. This is done using a special start sequence. Remember a little while ago we discussed about I2C data validity — that the SDA should not change while the SCL is high? Well, it doesn’t hold good for the start/stop sequence, which is why it makes them special sequences!
When the SCL is high and SDA goes from high to low (as shown in the following diagram), it marks the beginning of the transaction of Master with the Slave(s).
And when the SDA goes from low to high while the SCL is still high (as shown in the following diagram), it marks the end of the transaction of that Masterwith the Slave(s).
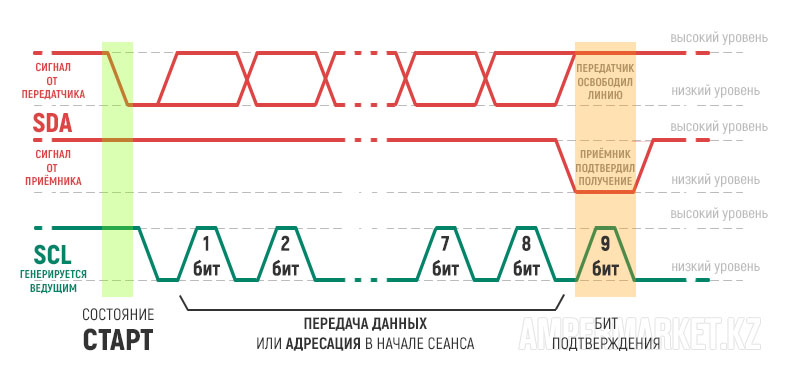
Acknowledge Scheme
As mentioned earlier, I2C transfers 8 bits (1 byte) of data at a time. After the transfer of each byte is complete, the receiver must acknowledge it. To acknowledge, the receiver sends an ACK bit back to the transmitter. Here’s how it goes–
- The transmitter (could be either Master or Slave) transmits 1 byte of data (MSB first) to the receiver during 8 clock pulses of SCL, after which it releases the SDA line i.e. the SDA line becomes HIGH for the ACK clock pulse.
- The receiver (could be either Master or Slave, it depends) is obliged to generate an acknowledge after each byte sent by the transmitter by pulling the SDA line LOW for the ACK clock pulse (9th clock pulse) of SCL.
- So overall, there are 9 SCL clock pulses required to transmit a byte of data. This is shown in the diagram below with the assumption that Master is the transmitter.
So far so good. But what if the receiver does not (or could not) acknowledge the data sent to it? What happens then? Does the entire system break down?
Well, there are two cases to that situation.
See these 2 cases here
Check out about author’s life in (My story right now) section at the end of each post from Jan 2020.
My story right now section is at the end of Part 3 of this series.
Интерфейс i2c Ардуино, сканер i2c шины (scl sda)
I2C Arduino (i2c — Inter-Integrated Circuits) — это протокол последовательной связи по двум линиям связи. Эти линии также называются: шина SDA (последовательные данные) и шина SCL (последовательный тактовый генератор). Порты SDA и SCL Ардуино подтягиваются к шине питания через резисторы. Рассмотрим, что такое шина i2c Arduino Nano и как подключить к плате несколько устройств по интерфейсу i2c.
Необходимые компоненты:
- Arduino Uno / Arduino Nano / Arduino Mega
- lcd 1602 i2c дисплей
- модуль rtc ds1307 i2c
- коннекторы
- библиотека LiquidCrystal_I2C.h и iarduino_RTC.h
Микроконтроллеры Arduino используют два контакта для работы i2c. В Arduino Uno и Nano линия SDA соответствует аналоговому порту A4, а SCL — аналоговому порту A5. В Ardunio Mega линия SDA — это 20 вывод, а линия SCL — 21 вывод. Чтобы облегчить работу с шиной i2c и обмен данными между устройствами, для IDE Arduino написана стандартная библиотека Wire (скачивать и устанавливать ее не нужно).
Протокол интерфейс i2c Ардуино: описание

Каждому устройству при подключении к микроконтроллеру по протоколу i2c присваивается уникальный адрес (можно подключить до 127 устройств). Изменить адрес устройства на шине невозможно, так как он встроен в микросхему. Часто производители предлагают возможность изменения адреса устройства в небольшом диапазоне, что позволяет подключить к шине iic несколько одинаковых устройств.
I2C scanner Arduino (сканер шины i2c)

| LCD 1602 i2c | Arduino Uno | Arduino Nano | Arduino Mega |
| GND | GND | GND | GND |
| VCC | 5V | 5V | 5V |
| SDA | A4 | A4 | 20 |
| SCL | A5 | A5 | 21 |
Следующая программа позволяет узнать адреса всех устройств, подключенных к шине i2c. Если устройство не было подключено или подключено неправильно, на мониторе порта появится сообщение о том, что устройство не найдено. Вместо дисплея можно подключить любое устройство, поддерживающее связь по протоколу iic — модуль часов реального времени DS1302, датчик давления BMP180 и т.д.
Скетч для сканирования шины I2C Arduino
Подключение несколько устройств к шине i2c Ардуино

| DS1307 i2c | Arduino Uno | Arduino Nano | Arduino Mega |
| GND | GND | GND | GND |
| VCC | 5V | 5V | 5V |
| SDA | A4 | A4 | 20 |
| SCL | A5 | A5 | 21 |
В следующем примере два устройства: дисплей 1602 и модуль часов времени будут подключены к шине IIC. После сборки схемы можно провести предварительное сканирование шины, используя программу, размещенную выше. Адреса всех устройств различны, и можно изменить только iic адрес дисплея. Для остальных устройств адреса «жестко привязаны» и используются в библиотеках по умолчанию.
Скетч несколько устройств на i2c, scanner i2c шины
Заключение. Мы исследовали возможность подключения нескольких i2c устройств к плате Ардуино, что будет полезно знать при разработке различных DIY проектов. Например, метеостанции на Ардуино с дисплеем и датчиком давления. Если у вас остались вопросы о сканере шины i2c или о подключении переферийных устройств по этому протоколу, не стесняйтесь оставлять их в комментариях к этой статье.
Интерфейс I2C (IIC)
Каждое устройство определяется как ведущее или ведомое, а также обладает уникальным (в пределах шины) адресом. Максимальное допустимое количество элементов, подсоединённых к одной шине, ограничивается максимальной емкостью шины — 400 пФ.
- Ведущее устройство — устройство, которое инициирует передачу данных и генерирует сигналы синхронизации, а также завершает передачу данных; может отправлять данные, либо запрашивать их
- Ведомое устройство — любое адресуемое устройство по отношение к ведущему устройству; может принимать данные или отправлять их по запросу ведущего
- Передатчик — устройство, передающее данные по шине
- Приемник — устройство, принимающее данные с шины.
Отношения ведущий-ведомый и приемник-передатчик не постоянны и зависят лишь от направления передачи данных в текущий момент времени. Обычно стандарт I2C подразумевает наличие в один момент времени только одного ведущего устройства, однако также допускается и наличие нескольких ведущих устройств в шине без нарушения работы системы. В этом случае для предотвращения возникновения ошибок и хаоса применяется процедура арбитража.
Принцип работы
Начало и завершение обмена данными
Обмен данными
Подтверждение приема данных
Адресация
- низкий уровень («0») означает, что ведущий будет отправлять информацию ведомому
- высокий («1») означает, что ведущий будет получать информацию от ведомого.
Из спецификации шины следует, что допускаются не только простые форматы обмена, но и комбинированные, когда в промежутке от состояния СТАРТ до состояния СТОП ведущий и ведомый могут выступать и как приемник и как передатчик данных. Комбинированные форматы могут быть использованы, например, для управления последовательной памятью.
Типичный сеанс обмена данными по шине I2C проиллюстрирован на следующем изображении: