Как программировать на codesys 2.3 новичку? Легко
Перед тем, как программировать ПЛК в среде разработки CoDeSyS 2.3 новички часто задаются вопросом: А какие системы требуется установить для корректной работы с аппаратом?? А как конфигурировать входы и выходы контроллера?? А каким образом связать устройство с ПК?? И снова, а как, а как?? Все мы с вами понимаем, устройства сложные и алгоритмы объёмные, и на изучение потребуется время. Я вот думаю, может написать небольшую книжку и назвать codesys для чайников? А вы согласны?
Из этой статьи вы узнаете:
Здравствуйте уважаемые коллеги и гости. Пишет вам автор блога kip-world.ru, Гридин Семён, и в этой статье я вам расскажу, как правильно программировать контроллер. Тема достаточно актуальная, я надеюсь после прочтения статьи, некоторые вопросы отпадут самим собой. =)
Как работает ПЛК?
ПЛК(программируемый логический контроллер) — это устройства полностью автоматизирующие работу аппаратов, различных агрегатов и станков. Фактически, это некий блок, который содержит входы и выходы, для подключения датчиков и исполнительных органов. Внутри прописывается логика.
Вычисления в устройстве выполняются циклически. То есть одни и те же действия выполнения программы выполняются в короткий промежуток времени.
В один цикл осуществляемый прибором выполняются следующие операции:
- Начало цикла;
- Чтение состояния входа;
- Выполнение кода пользователя;
- Запись состояния выходов;
- Обслуживание аппаратных ресурсов;
- Монитор системы исполнения;
- Контроль времени цикла;
- Переход на начало цикла;
Не буду больше разглагольствовать по теории. Давайте сразу перейдём к практике.
Из чего состоит программный комплекс для полноценной работы с ПЛК
Конечно вам поначалу покажется, что слишком много нужно знать, чтобы связать друг с другом основное приложение и утилитки, а потом соединить устройство. Я хочу вам сказать, что ничего сложного в процессе установки и связей — нет. В этом поможет моя статья.
Для начала нам нужно установить основной дистрибутив CoDeSyS 2.3 c официального сайта ОВЕН . А, я предлагаю во многих постах, касающихся программирования, использовать устройство ОВЕН ПЛК63 . Так как это универсальное устройство с экраном. У него на борту есть и дискретные входы, и аналоговые входы, и релейные выходы.
Итак, скачиваем программу:
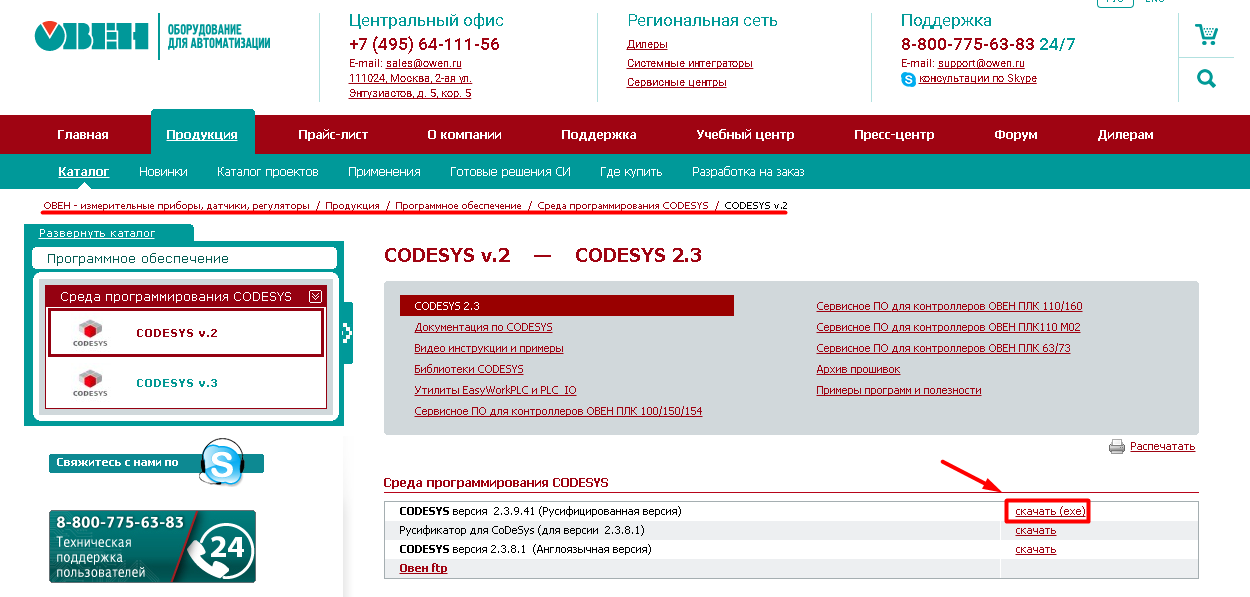
Затем следует стандартная процедура установки. Указываем путь и все время жмём “Далее”, “Далее”.
Следующим этапом будет установка таргетов для плк. Таргет — это некое описание о конфигурации ПЛК. Инструкция подсказывает CoDeSyS 2.3, какое количество и какие входы/выходы имеет устройство.
Скачиваем также с сайта ОВЕН . Рекомендую установить все таргеты, которые там есть. Чтобы потом не искать и не думать об этом, если придется писать алгоритм на другой ПЛК.
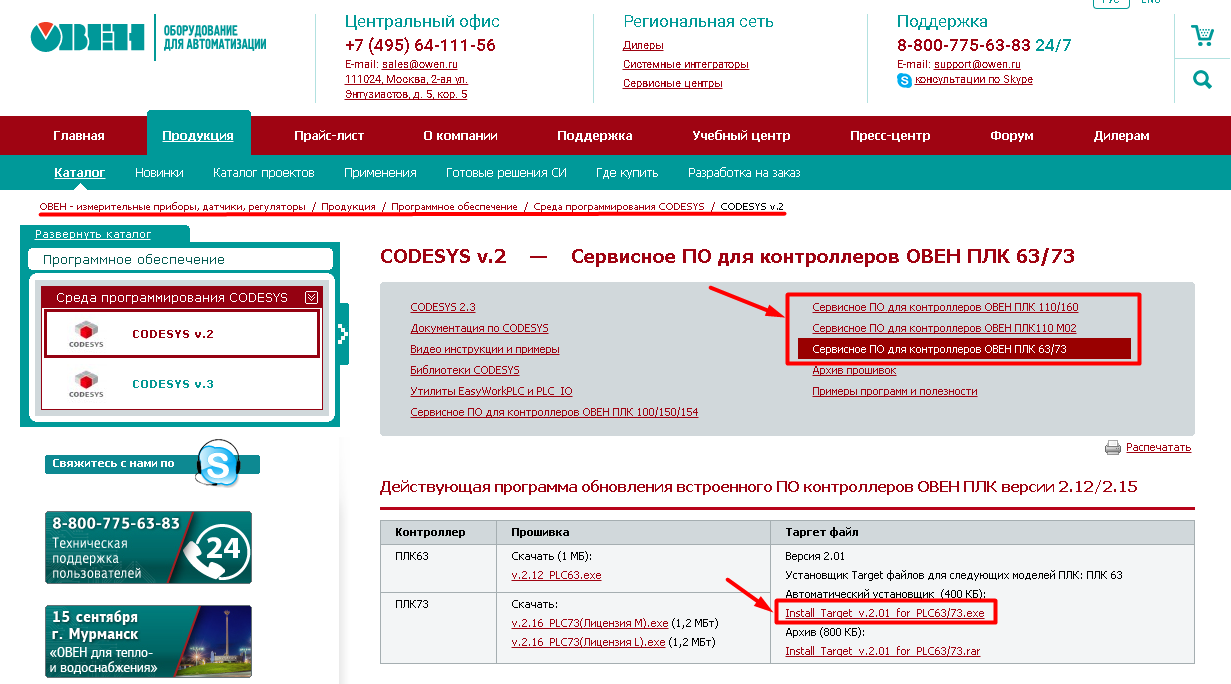
Запускаем автоматический установщик, устанавливаем инструкции. Всё, половину пути мы с вами уже сделали в этой работе! После этих всех процедур можно устанавливать библиотеки, но о них позже. Переходим к следующему пункту.
Рабочее окно программы
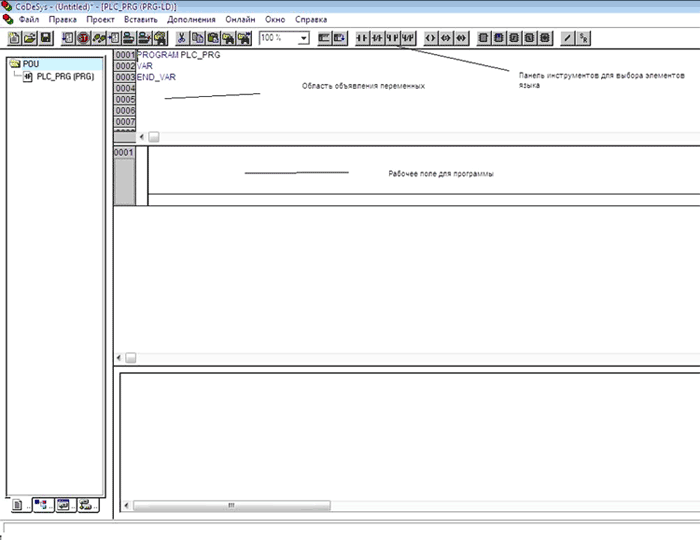
Дистрибутив мы с вами установили, таргеты тоже. Давайте мы с вами рассмотрим рабочее окно среды разработки, элементы меню и основные вкладки.
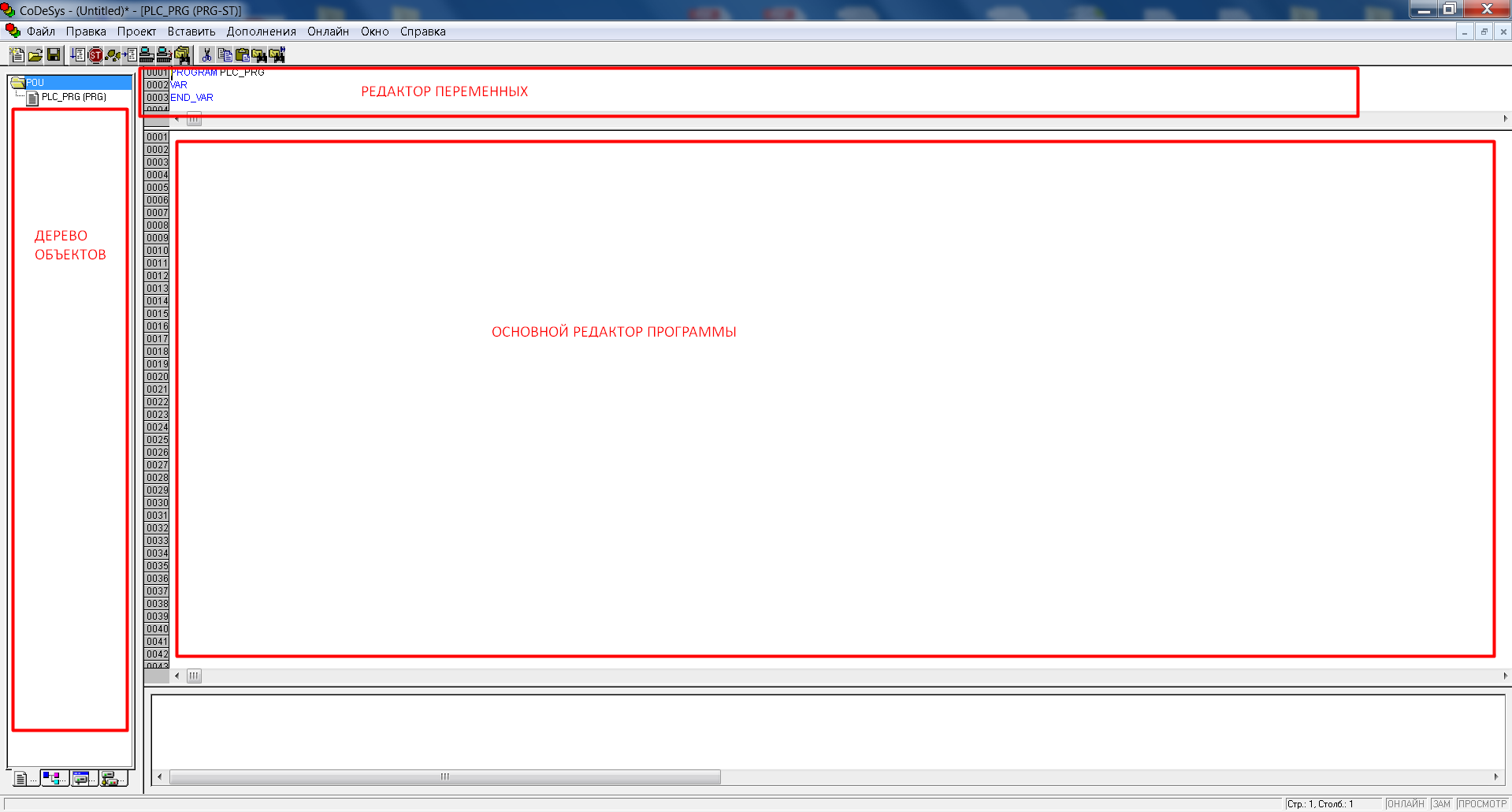
Основное поле на рисунке выше делится на три области:
- Редактор переменных и их типов;
- Дерево объектов;
- Редактор основного алгоритма программы;
Редактор переменных — здесь мы с вами вводим переменные и присваиваем им типы данных. Для тех, кто не знает, переменная — это имя, к которому будет обращаться программа и возвращать результат. А тип данных определяет род информации, диапазон представления чисел и множество других операций.
Дерево объектов — в этом окне располагаются такие объекты, как функции, функциональные блоки, подпрограммы, конфигурация ПЛК, библиотеки. Об этом я расскажу позже.
Редактор программы — тут мы с вами описываем основной алгоритм программы работы контроллера. Пишется на любом языке стандарта МЭК. Более подробно, можете прочитать статью .
Простой пример на ST
Для удобства восприятия информации я постарался структурировать. Поэтапно расписал последовательность действий. Если возникнут вопросы или пожелания, обязательно пишите в комментариях.
Изначально я размещу в статье код на языке ST. Логика работы заключается в следующем: на дискретный вход прибора подаётся сигнал и через задержку времени включается выход. В принципе задача простая, и мы с вами её решим.
Программирование ПЛК
Как и было описано, в первой статье, ПЛК осуществляет циклическое чтение входов, выполнение прикладной программы и запись выходов. Потому написание программы для ПЛК отличается от традиционного написания программы для микроконтроллеров и ПК. К программам для ПЛК предъявляются жесткие требования по надежности, одно дело зависает текстовый редактор, а другое дело программа, управляющая ядерным реактором. Другое не менее важное требование – это своевременное реагирование на событие. А что значит, во время не прореагировать на событие в промышленности? Это значит потерять контроль над технологическим процессом. Что в некоторых случаях, примером с реактором, приведет к непоправимым последствиям.
Рассмотрим отличия написания программы для ПЛК и микроконтроллера. Для примера возьмем простейшую задачку для МК — мигающий светодиод. Подозреваю, что все начинали знакомство с МК именно с этой задачи. Алгоритм будет следующим
- Записать в порт лог. 1.
- Временная задержка
- Записать в порт лог.0.
- Временная задержка
- Переход по метке на начало программы.
По данному алгоритму программа на ПЛК работать не будет, она содержит бесконечный цикл. А в ПЛК вся прикладная программа выполняется от начала до конца в каждом рабочем цикле, и любая программа должна отдавать управление системной программе. Поэтому при такой организации алгоритма наш ПЛК зависнет. Даже если и убрать, переход по метке на начало, программа не будет работать, так как нам хочется. Порт всегда будет в состоянии лог.0, так как физическая установка выходов производиться только после выполнения всей прикладной программы. И поэтому промежуточные состояния это всего лишь программные переменные в памяти, и на аппаратной части она ни как не отображаются.
В дополнение задержку времени тоже хорошо бы организовать с помощью таймера, периодически проверяя его значение, а не ожидать в пустую пока это время пройдет, наверняка для контроллера найдется другая более важная работа.
С учетом выше сказанного, правильный алгоритм будет выглядеть следующим образом:
1. Проверить таймер, если время паузы вышло, то
а) инвертировать выход
б) начать новый отсчет
2. Конец программы
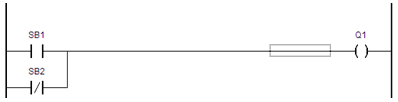
Реализуем данный алгоритм на практике ниже, а теперь рассмотрим основные особенности LAD (Ladder Diagram) языка.
Релейная схема представляет собой две вертикальные шины, между ними расположены горизонтальные цепи образованные контактами и обмотками реле. Пример на рисунке:
 — нормально разомкнутый контакт
— нормально разомкнутый контакт
 — нормально замкнутый(инверсный) контакт
— нормально замкнутый(инверсный) контакт
 — обмотка реле
— обмотка реле
Количество контактов цепи может быть разным, а обмотка одна.
Любому контакту ставится в соответствие логическая переменная, определяющая его состояние. Если нормально замкнутый контакт замкнут, то ИСТИНА, если размокнут – Ложь, для инверсного наоборот, он замкнут когда переменная имеет значение ЛОЖЬ. Имя переменной пишется над контактом и служит его названием.
Последовательно соединенные контакты равносильны логической операции И, а параллельно-монтажное ИЛИ. Инверсный контакт равносилен операции НЕ. Параллельное соединение обмоток допускается, а последовательное нет. Обмотка реле также может быть инверсной, тогда она копирует в соответствующую логическую переменную инверсное состояние цепи.
Идея релейных схем, такова, что все цепи работают параллельно, т.е. ток во все цепи подается одновременно. Но мы знаем, что программу процессор выполняет последовательно, и мы не можем это сделать одновременно. Так и в LAD программа выполняется последовательно слева направо, сверху вниз. Но цикл процессора мал, поэтому и получается эффект параллельности.
Любая переменная в рамках одной цепи имеет одно и то же значение. Если даже реле в цепи изменит переменную, то новое значение поступит на контакты только в следующем цикле. Цепи расположенные выше получают новое значение переменной сразу, а цепи расположенные ниже – только в следующем цикле. Строгий порядок выполнения очень важен, и благодаря ним LAD- диаграмма сохраняет устойчивость при наличии обратных связей.
Хоть это и противоречит аналогии LAD с релейными схемами, порядок выполнения LAD- программы можно нарушить с помощью меток и переходов. Это ухудшает читаемость программе, и в них бывает сложно разобраться, но как говориться если очень хочется, то можно. Для этого желательно разбить программу на модули, и делать переходы между модулями.
Возможности LAD программы можно расширить, вставляя функциональные блоки. Вставлять можно все стандартные функциональные блоки, которые содержаться в МЭК. Описание для функциональных блоков можно найти в справке.
Давайте составим нашу первую программу на LAD в среде CoDeSys. CoDeSys можно скачать в интернете, достаточно воспользоваться поисковиком
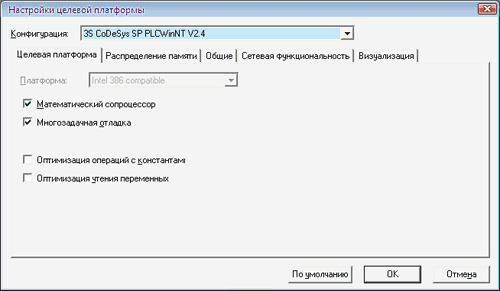
После установки, выбираем создать новый проект, и CoDeSys попросит выбрать целевую платформу для ПЛК. Указание целевой платформы необходимо, чтобы среда знала, для какого типа контроллера пишется программа. Выбираем 3S CodeSyS Sp PLCWinNT V2.4 и жмем OK.
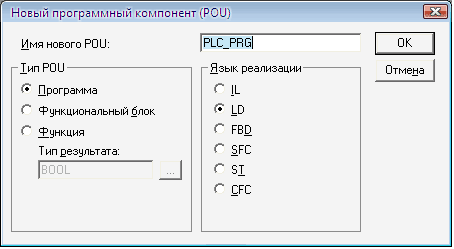
Имя проекта оставляем по умолчанию, язык выбираем LD
Интерфейс программы на русском языке, и интуитивно понятен. При наведении на элемент всплывает имя. Советую рассмотреть все элементы, а также пункты главного меню.
Для добавления элемента в программу необходимо левой кнопкой мыши кликнуть в рабочее поле программы и потом ЛКМ кликнуть на элемент, который вы хотите поместить в программу. Например, нормально разомкнутый контакт, у вас должно получиться следующее.

Вместо вопросительных знаков пишем имя нашей переменной, например SB, и нажимаем Enter, выходит окно объявление переменной, выбираем Bool и нажимаем OК.
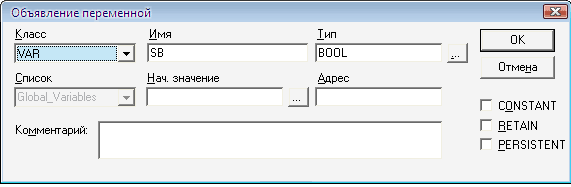
Рассмотрите, какие типы можно выбрать, а также какие классы переменных.
Давайте, реализуем программы для мигания светодиодом, а если говорить в общем, то программа для генератора одиночных импульсов
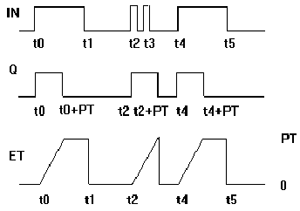
Для реализации программы используем функциональные блок таймер TP. Таймер TP – этой таймер одиночного импульса с заданной по входу PT длительностью.
Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. При переходе IN в TRUE выход Q устанавливается в TRUE и таймер начинает отсчет времени на выходе ET до достижения длительности, заданной PT. Далее счетчик не увеличивается. Таким образом, выход Q генерирует импульс длительностью PT по фронту входа IN.
Временная диаграмма работы TP:
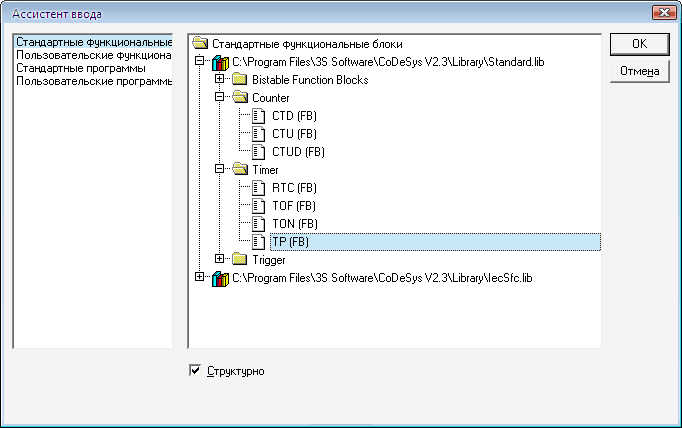
Для вставки TP, на панели элементов выбираем:

И у нас всплывает ассистент выбора функционального блока.
Скачайте файл проекта, и давайте рассмотрим как он работает.
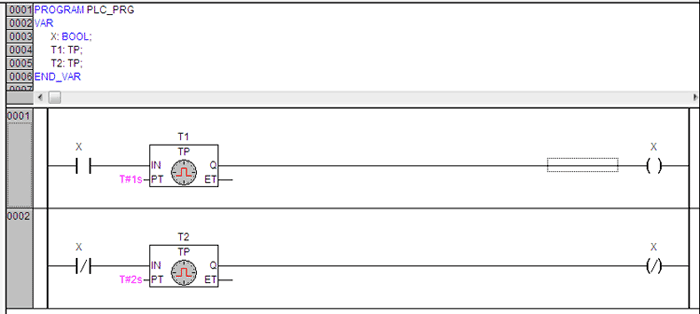
В начальный момент X= False , поэтому инверсный контакт X замкнут и таймер T2 запущен, выход Q= True, поэтому цепь включена. А так как обмотка в цепи инверсная, значит она копирует инверсное состояние цепи в X , и X остается False, после переполнения таймера Q = False , и инверсная обмотка переводит X в True. После этого запускается T1, после переполнения скидывает X в False и все повторяется. Переменная X является выходом генератора. Таймер T2 устанавливает паузу, а T1 длительность импульса.
Компилируем проект Проект -> Компилировать
В пункте онлайн выбираем Режим эмуляции , а затем Подключение и Старт. И видим, наша схема начинает переключаться, цепь где «протекает ток» выделяется синим цветом. Также в области объявления переменных видим текущее значение переменных.
Выход генератора можно поглядеть с помощью цифрового трассировщика, для этого переходим на вкладку Ресурсы в нижнем левом углу
Выбираем Цифровой трассировщик -> Дополнение -> Настройка трассировки, выйдет следующее окно
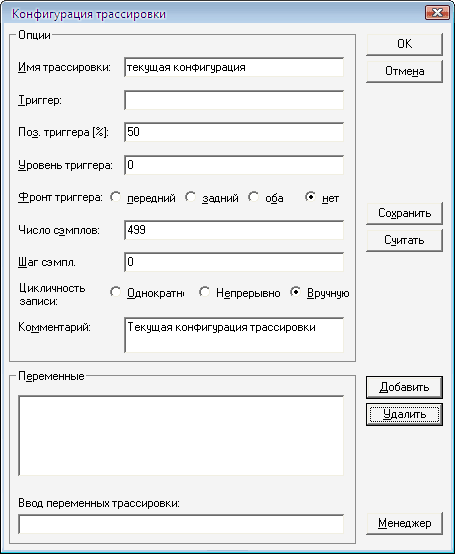
Цикличность записи поставим Вручную, нажимаем на менеджер и выбираем переменные X(Bool)
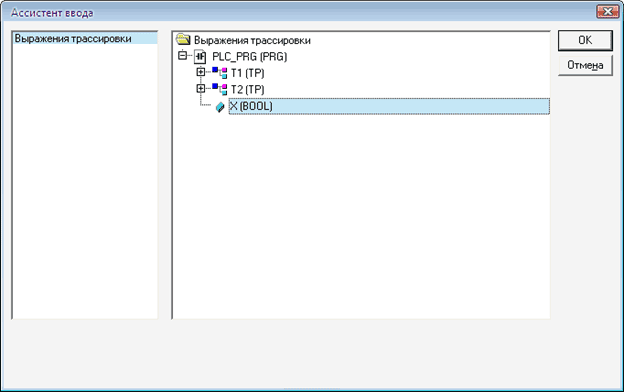
Нажимаем Ok . Выбираем перо для нашей переменной
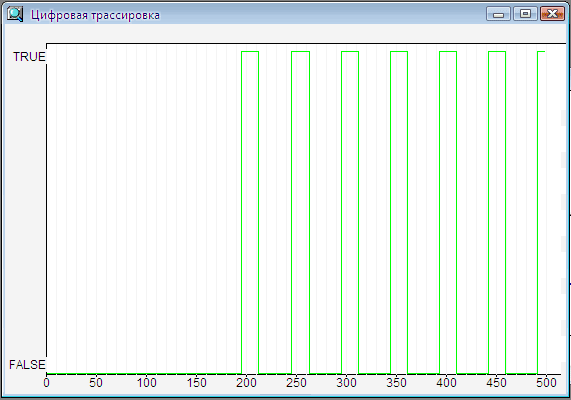
Выбираем в онлайн Подключение, нажимаем Старт , далее Дополнительно -> Начать трассировку, также выберите пункт Автоматическая трассировка
Рассмотрим еще один пример управление двигателем с электронной коммутацией обмоток статора
Саму программу представлять не буду, скачайте проект. А об алгоритме работы расскажу.
Все таймеры запускаются по сигналу старт. Каждый таймер отмеряет момент окончания фазы. Переменные Y1-Y3 являются выводами соответствующей фазы управления. Каждый выход включается в том случае, если таймер еще не переполнен и выключен предыдущий выход. Последняя цепь, является цепью автоматического перезапуска.
Технология автоматного программирования для ПЛК на языке LD
В предыдущих статьях мы фрагментарно описали практику автоматного программирования для ПЛК. Здесь мы сведем все в одном месте и кое-что добавим. Ответы на вопросы, которые все же могут возникнуть после прочтения данного материала, можно найти в ранее написанных статьях автора. Перечень базовых статей следующий:
Задание на проектирование программы
В предшествующей статье мы уже рассматривали штабелер. Здесь будет более сложный его вариант. Это узкое «крыло», которое, находясь в исходном состоянии, с паузой после старта проката подхватывает лист металла и поддерживает его в процессе движения. После останова проката и отсечения листа оно выполняет «отскок» вперед, освобождая конец листа, который падает на приемное устройство — гидростол. После этого «крыло» возвращается в исходное состояние. Во время этих движений прокат должен быть остановлен. После исполнения задания (формирования нужного числа листов заданной длины) «крыло» перемещается в заключительную позицию за пределы гидростола. Возврат в исходное состояние происходит после нажатия кнопки «Штабелер». Выполнение самого задания начинается с нажатия кнопки «Прокат», а длина отдельного листа и общее их количество указывается на панели оператора.
После нажатия кнопки «Сброс» (прокат останавливается, переходя в режим паузы) штабелер должен войти в режим паузы. Повторное нажатие кнопки выполняет реальный сброс системы управления. Продолжить прокат, находясь в ситуации паузы, можно с помощью кнопки «Прокат». Штабелер, находясь в режиме «Автомат», может входить в тот же режим паузы, но после формирования текущего листа. Работа штабелера в режиме системы «Полуавтомат» несколько отличается от работы в режиме «Автомат». В первом случае он останавливается после выполнения проката и ожидает срабатывания гильотины (в режиме «Полуавтомат» она запускается вручную). Дождавшись, он сбрасывает лист и перемещается в заключительную позицию. Из нее нажатием кнопки Штабелер «крыло» возвращается в исходное состояние. В режиме «Автомат» перемещение в заключительную позицию происходит только после выполнения задания.
Алгоритм управления штабелером в форме двух взаимодействующих конечных автоматов (КА) представлен на рис. 1. Более простой автомат представляет алгоритм работы с датчиками, другой — алгоритм управления штабелером. Реакцию на сигнал паузы, на кнопку «Штабелер», а также на сигнал запуска реализуется обычными средствами языка LD и вынесено за рамки нашего обсуждения.
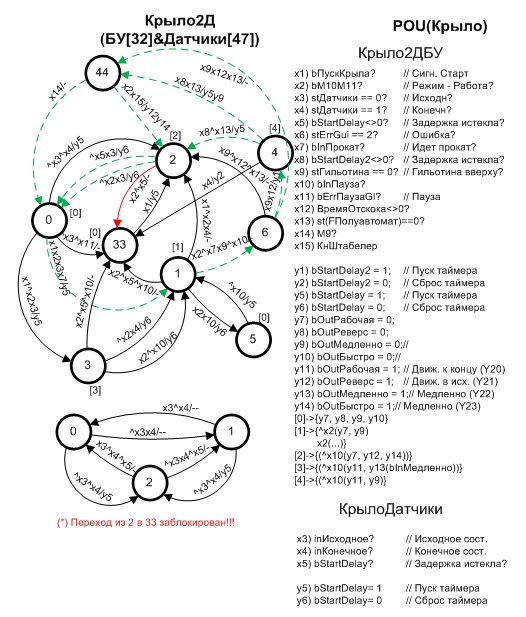
Рис. 1. Алгоритм работы «Штабелера-крыло»
Процесс создания модели программы
Программирование начинается с модели программы. В нашем случае это будет модель в форме конечного автомата. Ее (модель) можно «держать в голове», рисовать на листе бумаги, но настоятельный совет – используйте графический редактор. У нас это редактор Microsoft Office Visio. Он обладает всем, что помогает нарисовать граф, подобный графу автомата на рис. 1. Причем, чем сложнее автомат, тем больше выгоды будет от его применения. Далее, например, путем обычного копирования элементов имеющегося графа можно создавать графы уже любой сложности.
В нашем случае от графического редактора нужно не так уж много. Рисовать, во-первых, состояния в форме кружков с пометками внутри – именами состояний (у нас это будут только номера). Во-вторых, соединять состояния направленными дугами и помечать их условиями переходов и выдаваемых сигналов. Кроме этого, Visio позволяет легко изменять вид графа, перемещая вершины, что ведет к автоматическим изменениям соединяющих их дуг.
Вершинам графа можно поставить в соответствие то или иное действие, ассоциировать с ним некую предысторию работы алгоритма и т.д. и т.п. Например (см. рис.1), вершина 0 – это начальное состояние алгоритма. Вершина с номером 33 – состояние ошибки. В состоянии 1 выдаются сигналы управления движением крыла. В состоянии 4 – лист сброшен и выполняется «отскок», при котором крыло попадает в состояние 2. Из него модель может продолжить работу или, выполнив задание, перейти в состояние 44 и т.д. и т.п.
Фактически каждое состояние алгоритма имеет тот или ной смысл, а потому, наблюдая за ними (а мы такую уникальную возможность имеем!), можно понять, что происходит с алгоритмом в любой момент времени. Возможность наблюдения за состояниями превращает тестируемый алгоритм из «черного ящика» в «белый ящик».
Автоматная модель позволяет объективно оценить сложность будущей программы. Она зависит от числа состояний автомата, количества входных/выходных каналов, связности графа, т.е. множества и разнообразия переходов, и сложности предикатов и действий. Предикаты и действия в случае ПЛК достаточно просты. Обычно это: прочитать вход ПЛК в случае предиката и/или установить выходной сигнал в случае действия. А вот логика алгоритма, особенно при взаимодействии с другими функциональными блоками, способна доставить массу хлопот.
Так что программирование для ПЛК не столь уж простое, как это может показаться на первый взгляд.
Процесс кодирования
Создав модель, мы переходим к ее реализации. Перейдя в дерево проекта, в папке функциональных блоков (ФБ), создаем заготовку — функциональный блок. Он должна иметь элементы, соответствующие конструкции автомата на языке LD. Как минимум, это два входа и один выход. Входные каналы – это канал сигнала сброса и канал с присвоенным автомату элементом массива текущих состояний автомата. Выходной канал – элемент массива теневых состояний с индексом равным индексу текущих состояний.
Код вызова ФБ для штабелера представлен на рис. 2. Данный функциональный блок имеет описанные выше каналы. Остальные каналы задаются локальными переменными соответствующего типа. Так, переменные типа VAR_INPUT создают входные каналы, VAR_OUTPUT – выходные, VAR_IN_OUT – совмещенные входные/выходные каналы, а тип VAR – это обычные локальные переменные.
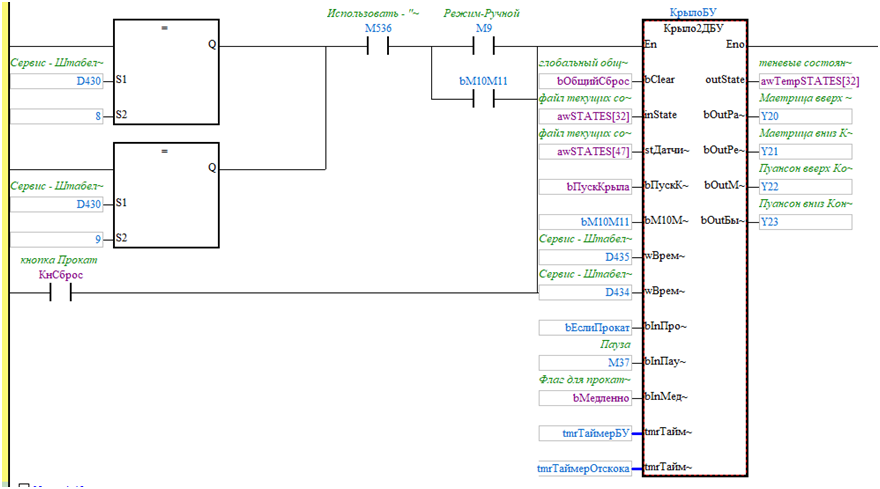
Рис.2. Функциональный блок управления штабелером
Рис.3 дает полное представление о локальных переменных. Переменные с именами bClear, inState, outState соответствуют упомянутым выше каналам. На рис. 4 приведен код инициализации ФБ и код работы с таймерами. Инициализация при включении ПЛК и/или получении сигнала сброса устанавливает автомат в начальное состояние.
Создав заготовку, можно приступить к кодированию автомата. Код каждого перехода автомата имеет единый вид: сначала идет проверка текущего состояния автомата и входных условий, затем, если это необходимо (для автоматов Мили), — выполнение действий и в завершение изменение текущего состояния. Если текущее состояние не изменяется, то последнюю операцию можно опустить. Образец кодирования переходов, исходящих из начального состояния 0 (см. рис.1) дан на рис. 5.
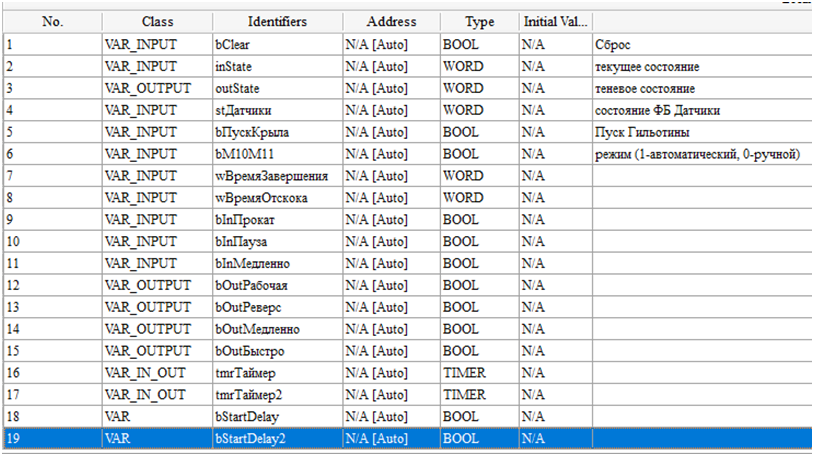 Рис.3. Локальные переменные ФБ Крыло2ДБУ
Рис.3. Локальные переменные ФБ Крыло2ДБУ  Рис.4. Инициализация ФБ и управление таймерами
Рис.4. Инициализация ФБ и управление таймерами 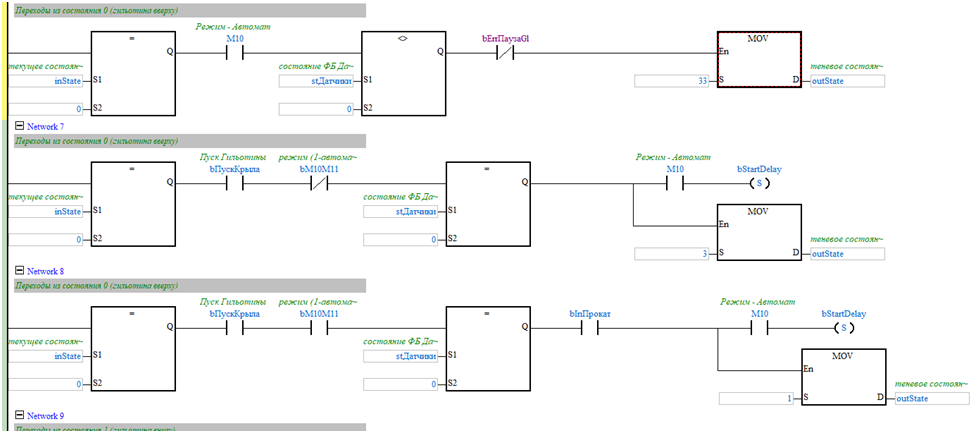 Рис.5. Пример кодирования переходов автомата
Рис.5. Пример кодирования переходов автомата
Реверс-инжиниринг
Не секрет, что программисты не любят документировать программы. От этого часто страдают они же сами, т.к. часто спустя уже какое-то время даже сам автор программы с трудом может разобраться в своем творении. Но, даже понимая это, рисование блок-схем, графов, детальное описание алгоритма и т.п. – это не про программистов. Достаточно кратко, весьма ярко и доходчиво процесс документирования программ описан в статье [1]. Полемизируя с ней, можно утверждать, что в рамках технологии автоматного программирования программы все же обладают свойством самодокументирования и это совсем не чушь.
Безусловно, разобраться с алгоритмом программы по ее коду весьма проблематично. На рис. 6 приведен код программы, созданный для модели на рис.1, в режиме просмотра для последующей распечатки. Это восемь убористо заполненных листов на языке LD. Сравните его с графом автомата. Что из них нагляднее и понятнее, думаю, вопрос риторический.
Но, с другой стороны, зная принцип кодирования автоматной программы, вы можете по коду программы легко восстановить граф автомата. Так, во-первых, сразу ясно, сколько состояний имеет программа. Во-вторых, легко восстановить переходы между состояниями, т.к. каждой цепи соответствует, как правило, ровно один переход, а действия программы привязаны или к состояниям программы, или представлены на соответствующих переходах. Останется только добавить смысловую интерпретацию условий и действий, в чем может помочь уже комментарий. Конечно, если их нет (совсем уж, видимо, «гениальный» программист создавал программу или комментарии просто не доступны), то придется все интерпретировать самому.
Тестирование программы
Тестирование, наверное, самый важный этап во всем процессе разработки программы. Программа, работающая с ошибками, ни кому не нужна, будь она трижды автоматной или какой-то там еще. Но автоматы и здесь предоставляют возможность, которой нет у программ, спроектированных обычным способом. Только автоматная программа позволяет автоматически отслеживать текущее состояние программы. А это может сказать о многом, т.к. отражает поведение программы в динамике.
Конечно, в программу можно ввести флаги, отражающие ее поведение. Но, во-первых, флаги нужно придумать, правильно расставить и предусмотреть код для их установки и сброса. Т.е. то, что на уровне автомата формируется естественным образом, в случае использования флагов требует определенных усилий и сосредоточенности. В конце концов, использование флагов просто ненадежно, за что их не критиковал разве что только ленивый.
Но у ПЛК есть одна неприятная особенность – отсутствие пошаговой отладки. Присуще ли это только ПЛК фирмы DELTA или и другим – не знаю, но в данном случае, как говорится, что есть, то есть. Для программистов, привыкших к возможностям современных отладчиков, это будет, скорее всего, если не шоком, то определенной «новостью» (как это было для автора). Но и здесь состояния автомата более чем кстати.
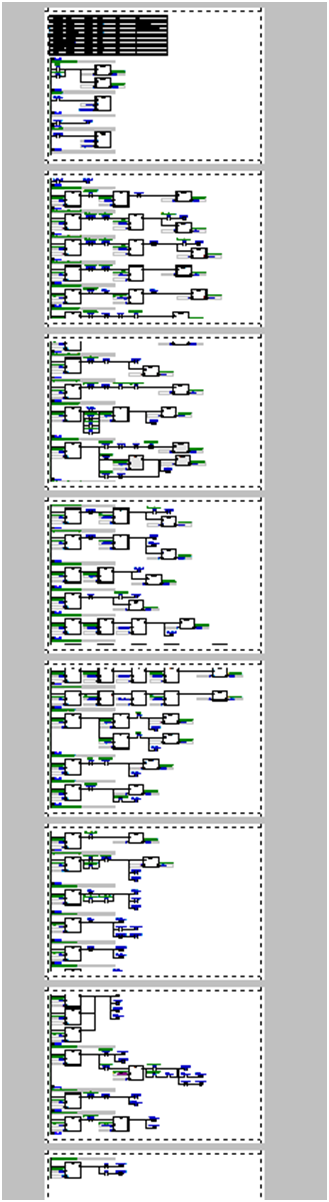
Рис.6. Код ФБ на языке LD (режиме просмотра печати)
Рис. 7 демонстрирует процесс отладки. Из него следует: штабелер находится в состоянии 1 и идет процесс проката, т.к. флаг проката bЕслиПрокат = true. «Крыло» находится в движении, о чем говорят установленные сигналы управления двигателем – Y20 и Y22. При этом оно явно сошло с исходной позиции, т.к. awState[47] = 2 (см. автомат датчиков на рис.1). Режим работы выбран автоматический – bM10M11 = true, т.е. это режим «Полуавтомат» или «Автомат». Нам остается только крутить энкодер и отслеживать состояние проката на панели оператора, где отображается текущая длина листа в поле «Исполнено» (см. рис.8).

Рис.7. Процесс отладки программы

Рис.8. Пульт оператора
Заключение
Существует просто огромный пласт информации, обсуждающий этапы проектирования программ (см., например, [2]). Но среди этой информации мало такой, которая бы за базу брала модель программы. А от нее зависит многое, если не все. В основе технологии автоматного программирования лежит сетевая конечно-автоматная алгоритмическая модель. Это позволяет охватить и параллельные процессы, без которых современное проектирование просто немыслимо. И если обычное программирование только-только осваивает параллелизм, то в ПЛК в той или иной мере его используют давно. Здесь он может быть представлен модулями POU, которые содержать разнообразные функциональные блоки, работающие параллельно.
Но параллельно работающие ФБ, взаимодействуя друг с другом, порождают достаточно сложные процессы, поведение которых необходимо анализировать. Анализ этого — весьма сложная и трудоемкая задача. Для модели штабелера это еще выполнимо и сводится к построению для сети из двух автоматов эквивалентного однокомпонентного автомата. Это будет автомат, имеющий 27 состояний. Уже одно их количество (а, ведь, нужно еще найти все переходы между состояниями) способно подавить любое желание строить подобные планы.
Поэтому дальнейший анализ на уровне параллельных процессов, как правило, делается на основании интуитивных предположений. Например, если нет сомнений в правильности созданных автоматов, то не так уж много причин беспокоиться и по поводу их совместной работы. Хотя в этом случае только полноценное тестирование способно рассеять все сомнения на этот счет.
И все же основной вывод, к которому пришел лично я, как программист, уже довольно давно: только следование технологии — необходимая основа качественного программирования. Нынешнее программирование, если и является, как принято считать, искусством, то искусством кустарным. Все в нем сделано как-то — «на коленке». Чтобы искусство превратилось в мастерство, нужна технология, опирающаяся на теорию. Я выбрал и выбираю автоматную технологию, которую описал в своих статьях.
Если бы была технология, которой бы я доверял больше, чем своим автоматам, то я бы использовал ее. И, казалось бы, есть из чего выбирать. Тот же UML или Simulink, на память приходят автоматы в Qt, SWITCH- технология, в конце концов, и т.д. и т.п. Но на поверку оказывается, что это или вовсе не автоматы, а только их названия, или весьма ограниченные версии автоматов. Поэтому я выбираю те автоматы, где . правильно работает модель RS-триггера. Почему он? Потому что объективные доказательства правильности его работы доказывают корректность параллельных свойств среды исполнения параллельных процессов. Ведь, все так просто!
Ну, вы понимаете о чем я. Лично у меня-то выбора уже нет, а у вас . на одну испытанную технологию больше. Везет же! Но только кому.
Принцип работы и основы программирования ПЛК
До появления твердотельных логических схем разработка систем логического управления основывались на электромеханических реле. По сей день реле не устарели в своем предназначении, но все же в некоторых своих прежних функциях они заменены контроллером.
В современной промышленности существует большое количество различных систем и процессов, требующих автоматизации, но теперь такие системы редко проектируются из реле. Современные производственные процессы нуждаются в устройстве, которое запрограммировано на выполнение различных логических функций.
В конце 1960-х годов американская компания «Bedford Associates» разработала компьютерное устройство, названное MODICON (Modular Digital Controller). Позже название устройства стало названием подразделения компании, спроектировавшей, сделавшей и продавшей его.
Другие компании разработали собственные версии этого устройства, и, в конце концов, оно стало известно как ПЛК, или программируемый логический контроллер. Целью программируемого контроллера, способного имитировать работу большого количества реле, была замена электромеханических реле на логические элементы.

ПЛК имеет набор входных клемм, с помощью которых можно контролировать состояние датчиков и выключателей. Также имеются выходные клеммы, которые сообщают «высокий» или «низкий» сигнал индикаторам питания, электромагнитным клапанам, контакторам, небольшим двигателям и другим самоконтролируемым устройствам.
ПЛК легки в программировании, так как их программный язык напоминает логику работы реле. Так обычный промышленный электрик или инженер-электрик, привыкший читать схемы релейной логики, будет чувствовать себя комфортно и при программировании ПЛК на выполнение тех же функций.
Подключение сигналов и стандартное программирование несколько отличаются у разных моделей ПЛК, но они достаточно схожи, что позволяет разместить здесь «общее» введение в программирование этого устройства.
Следующая иллюстрация показывает простой ПЛК, а точнее то, как он может выглядеть спереди. Две винтовые клеммы, обеспечивающие подключение для внутренних цепей ПЛК напряженим до 120 В переменного тока, помечены L1 и L2.
Шесть винтовых клемм, расположенных с левой стороны, обеспечивают подключение для входных устройств. Каждая клемма представляет свой входной канал (Х). Винтовая клемма («общее» подключение ) расположенная в левом нижнем углу обычно подключается к L2 (нейтральная) источника тока напряжением 120 В переменного тока.
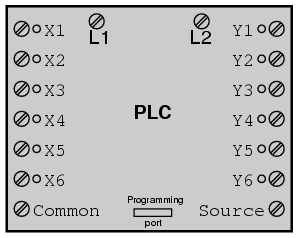
Внутри корпуса ПЛК, связывающего каждую входную клемму с общей клеммой, находится оптоизолятор устройства (светодиод), который обеспечивает электрически изолированный «высокий» сигнал для схемы компьютера ( фототранзистор интерпретирует свет светодиода), когда 120-тивольтный переменный ток устанавливается между соответствующей входной клеммой и общей клеммой. Светодиод на передней панели ПЛК дает возможность понять, какой вход находится под напряжением:
Выходные сигналы генерируются компьютерной схемотехникой ПЛК, активируя переключающее устройство (транзистор, тиристор или даже электромеханическое реле) и связывая клемму «Источник» (правый нижний угол) с любым помеченным буквой Y выходом. Клемма «Источник» обычно связывается с L1. Так же, как и каждый вход, каждый выход, находящий под напряжением, отмечается с помощью светодиода:
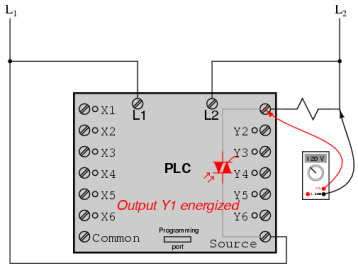
Таким образом, ПЛК может подключаться к любым устройствам, таким как переключатели и электромагниты.
Основы программирования ПЛК
Современная логика системы управления установлена в ПЛК посредством компьютерной программы. Эта программа определяет, какие выходы находятся под напряжением и при каких входных условиях. Хотя сама программа напоминают схему логики реле, в ней не существует никаких контактов переключателя или катушек реле, действующих внутри ПЛК для создания связей между входом и выходом. Эти контакты и катушки мнимые. Программа пишется и просматривается с помощью персонального компьютера, подключенного к порту программирования ПЛК.
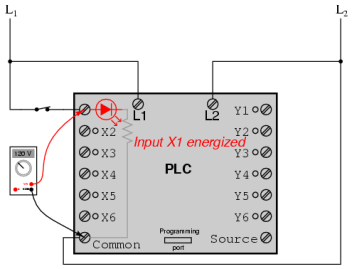
Рассмотрим следующую схему и программу ПЛК:
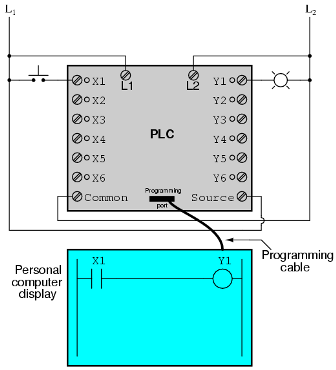
Когда кнопочный переключатель не задействован (находится в не нажатом состоянии), сигнал не посылается на вход Х1. В соответствие с программой, которая показывает «открытый» вход Х1, сигнал не будет посылаться и на выход Y1. Таким образом, выход Y1 останется обесточенным, а индикатор, подключенный к нему, погасшим.
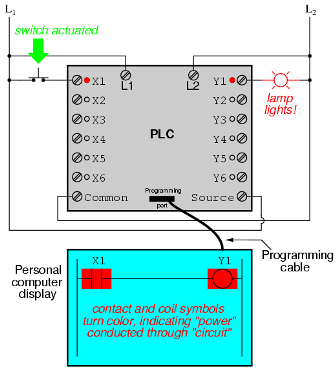
Если кнопочный переключатель нажат, сигнал будет отправлен к входу Х1. Все контакты Х1 в программе примут активированное состояние, как будто они являются контактами реле, активированными посредством подачи напряжения катушке реле, названной Х1. В этом случае открытый контакт Х1 будет «закрыт» и отправит сигнал к катушке Y1. Когда катушка Y1 будет находиться под напряжением, выход Y1 осветится лампочкой, подключенной к нему.
Следует понимать, что контакт Х1 и катушка Y1 соединены с помощью проводов, а «сигнал», появляющийся на мониторе компьютера, виртуальный. Они не существуют как реальные электрические компоненты. Они присутствуют только в компьютерной программе — часть программного обеспечения — и всего лишь напоминают то, что происходит в схеме реле.
Не менее важно понять, что компьютер, используемый для написания и редактирования программы, не нужен для дальнейшего использования ПЛК. После того, как программа была загружена в программируемый контроллер, компьютер можно отключить, и ПЛК самостоятельно будет выполнять программные команды. Мы включаем монитор персонального компьютера в иллюстрации для того, чтобы вы поняли связь между реальными условиями (замыкание переключателя и статусы лампы) и статусы программы (сигналы через виртуальные контакты и виртуальные катушки).
Истинная мощь и универсальность ПЛК раскрывается, когда мы хотим изменить поведение системы управления. Поскольку ПЛК является программируемым устройством, мы можем изменить, команды, которые мы задали, без перенастройки компонентов, подключенных к нему. Предположим, что мы решили функцию «переключатель – лампочка» перепрограммировать наоборот: нажать кнопку, чтобы выключить лампочку, и отпустить ее, чтобы включить.
Решение такой задачи в реальных условиях заключается в том, что выключатель, «открытый» при нормальных условиях, заменяется на «закрытый». Программное ее решение – это изменение программы так, чтобы контакт Х1 при нормальных условиях был «закрыт», а не «открыт».
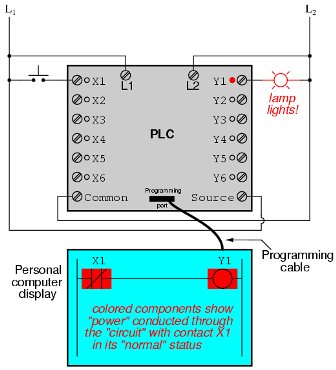
На следующем изображении вы увидите уже измененную программу, при не активизированном переключателе:
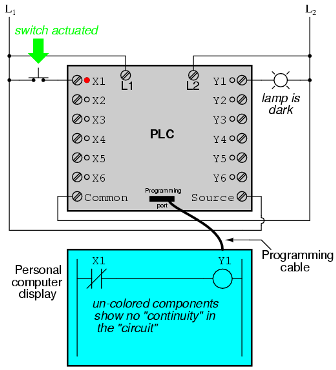
А здесь переключатель активизирован:
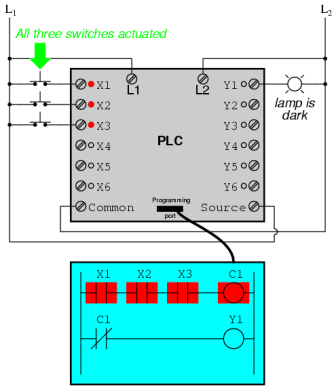
Одним из преимуществ реализации логического контроля в программном обеспечении, в отличие от контроля с помощью оборудования, является то, что входные сигналы могут быть использованы такое количество раз, какое потребуется. Например, рассмотрим схему и программу, разработанной для включения лампочки, если хотя бы два из трех переключателей активизированы одновременно:
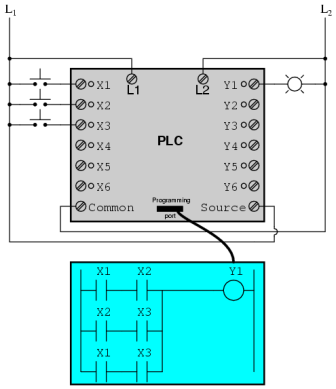
Чтобы построить аналогичную схему, используя реле, потребуются три реле с двумя открытыми контактами при нормальных условиях, каждый из которых должен быть использован. Однако используя ПЛК, мы можем без добавления дополнительного оборудования запрограммировать столько контактов для каждого «Х» входа, сколько нам хотелось бы (каждый вход и выход должен занимать не больше, чем 1 бит в цифровой памяти ПЛК) и вызывать их столько раз, сколько необходимо.
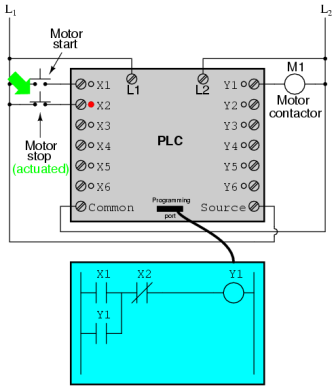
Кроме того, так как каждый выход ПЛК занимает не более одного бита в его памяти, мы можем вносить контакты в программу, приводя Y выход в не активизированное состояние. Для примера возьмем схему двигателя с системой контроля начала движения и остановки:
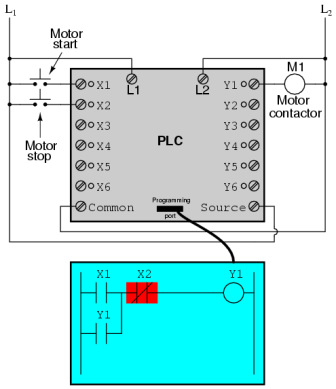
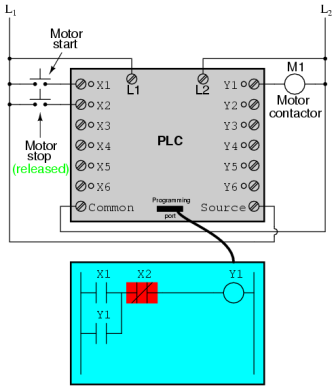
Переключатель, подключенный к входу Х1, служит кнопкой «Старт», в то время как переключатель, подключенный к входу Х2 — кнопкой «Стоп». Другой контакт, названный Y1, подобно печати в контакте, позволяет контактору двигателя оставаться под напряжением, даже если отпустить кнопку «Старт». При этом вы можете увидеть, как контакт Х2, «закрытый» при нормальных условиях, появится в цветном блоке, показывая тем самым, что он находится в «закрытом» («электропроводящем») состоянии.
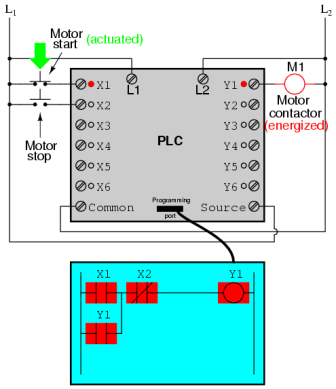
Если нажать кнопку «Старт», то по «закрытому» контакту Х1 пройдет ток ток и он отправит 120 В переменного токак к контактору двигателя. Параллельный контакт Y1 также «закроется», тем самым замкнув цепь:
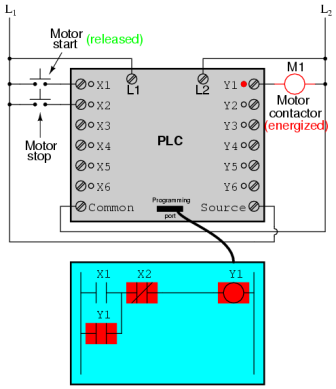
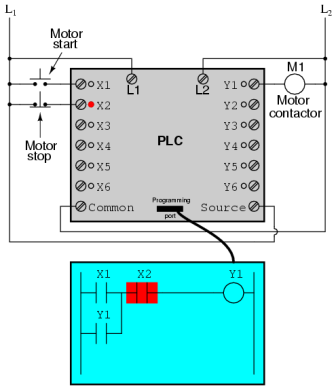
Если мы теперь нажмем кнопку «Старт», контакт Х1 перейдет в «открытое» состояние, но двигатель будет продолжать работать, потому что замкнутый контакт Y1 все еще будет держать катушку под напряжением:
Чтобы остановить двигатель, нужно быстро нажать кнопку «Стоп», которая сообщит напряжение входу Х1 и «открытому» контакту, что приведет к прекращению подачи напряжения к катушке Y1:
Когда вы нажали кнопку «Стоп», вход Х1 остался без напряжения, вернув тем самым контакт Х1 в его нормальное «закрытое» состояние. Двигатель ни при каких условиях не станет работать снова, пока вы снова не нажмете кнопку «Старт», потому что печать в контакте Y1 была потеряна:
Очень важна отказоустойчивая модель устройств контроля ПЛК, так же, как и в устройствах контроля электромеханического реле. Нужно всегда учитывать влияние ошибочно «открытого» контакта на работу системы. Так, например, в нашем случае, если контакт Х2 будет ошибочно «открыт», то не будет никакой возможности остановить двигатель!
Решением этой проблемы является перепрограммирование контакта Х2 внутри ПЛК и фактическое нажатие кнопки «Стоп»:
Когда кнопка «Стоп» не нажата, вход ПЛК Х2 находится под напряжением, т.е. контакт Х2 «закрыт». Это позволяет двигателю начать работу, когда контакту Х1 сообщается ток, и продолжать работу, когда кнопка «Старт» отпущена. Когда вы нажимаете кнопку «Стоп», контакт Х2 переходит в «открытое» состояние и двигатель прекращает работу. Таким образом, вы можете увидеть, что функциональной разницы между этой и предыдущей моделью нет.
Тем не менее, если входной контакт Х2 был ошибочно «открыт», вход Х2 может быть остановлен нажатием кнопки «Стоп». В результате двигатель немедленно отключается. Эта модель безопаснее, чем предыдущая, где нажатие кнопки «Стоп» сделает невозможным остановку двигателя.
В дополнение к входам (Х) и выходам (Y) в ПЛК есть возможность использовать «внутренние контакты и катушки. Они используются так же, как и промежуточные реле, применяемые в стандартных релейных схемах.
Чтобы понять принцип работы «внутренних» схем и контактов, рассмотрим следующую схему и программу, разработанную по принципу трех входов логической функции AND:
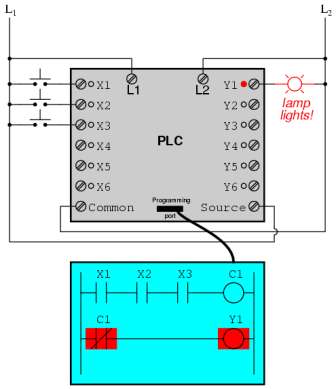
В данной схеме, лампа горит, до тех пора пока какая-либо из кнопок не нажата. Для того чтобы выключить лампу следует нажать все три кнопки:
В этой статье, посвященной программируемым логическим контроллерам, иллюстрирована лишь небольшая выборка их возможностей. Как компьютер ПЛК может выполнять и другие расширенные функции с гораздо большей точностью и надежностью, чем при использовании электромеханических логических устройств. Большинство ПЛК имеют больше шести входов и выходов. Следующая иллюстрация показывает один из ПЛК компании Allen-Bradley:

С модулями, каждый из которых имеет 16 входов и выходов, этот ПЛК имеет возможность управлять десятком устройств. Помещенный в шкаф управления ПЛК занимает мало места (для электромеханических реле, выполняющих те же функции, понадобилось бы гораздо больше свободного пространства).

Одно из преимуществ ПЛК, которое просто не может быть продублировано электромеханическим реле, является удаленный мониторинг и управление через цифровые сети компьютера. Поскольку ПЛК – это ничего больше, чем специализированный цифровой компьютер, он может легко «общаться» с другими компьютерами. Следующая фотография — графическое изображение процесса заполнения жидкостью (насосная станция для муниципальной очистки сточных вод), контролируемого ПЛК. При этом сама станция расположена в нескольких километрах от монитора компьютера.
Перевод с английского — Юлия Сурта.
Structured Text
Представляем книгу по Structured Text (ST) МЭК 61131-3. Автор — Сергей Романов
Книга «Изучаем Structured Text МЭК 61131-3»: Ссылка на книгу
Надеюсь, что эта статья была для вас полезной. Смотрите также другие статьи в категории Электрическая энергия в быту и на производстве » Устройства автоматики