Как работает бесколлекторный двигатель постоянного тока
Если вы работаете над проектом, в котором есть движущаяся часть, вы, вероятно, будете искать двигатель, чтобы сделать это движение возможным. В этой серии статей мы рассмотрим наиболее популярные типы двигателей, которые используют разработчики. Сначала мы рассмотрели коллекторные двигатели постоянного тока. Теперь давайте посмотрим на их ближайший аналог: бесколлекторный двигатель постоянного тока.
Чтобы узнать, для каких проектов лучше всего подходят бесколлекторные двигатели постоянного тока, ознакомьтесь с обзором:
Обзор бесколлекторных двигателей постоянного тока
Бесколлекторные двигатели – это новая технология двигателей, быстро внедряемая в высокотехнологичных приборах и электромобилях (например, Tesla Model S) в качестве замены коллекторных двигателей постоянного тока. Они также чрезвычайно распространены в любительских летательных аппаратах, включая многомоторные. Поскольку бесколлекторные двигатели постоянного тока не имеют коллектора и щеток (что очевидно), они работают без многих ограничений коллекторных двигателей постоянного тока.
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности
Как они работают?
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности.
 Оценка характеристик бесколлекторных двигателей
Оценка характеристик бесколлекторных двигателей
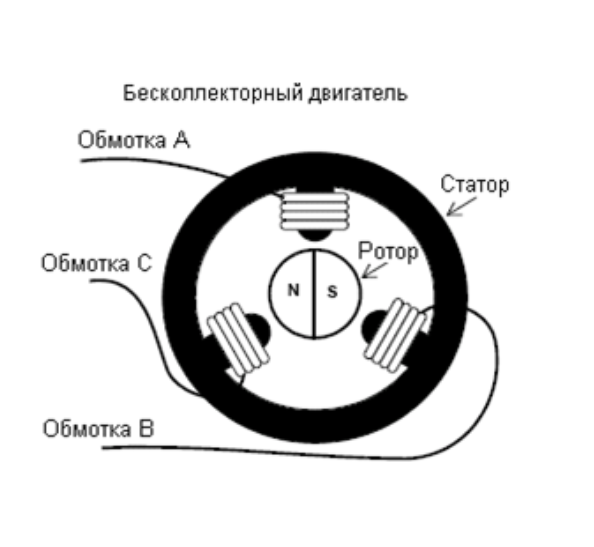
Как и коллекторные двигатели постоянного тока, бесколлекторные двигатели работают путем изменения полярности обмоток внутри двигателя. Магнитные поля, создаваемые при возбуждении обмоток, оказывают толкающее воздействие на постоянные магниты, расположенные вокруг внешнего корпуса.
На бесколлекторном двигателе постоянного тока вращается не вал двигателя, а внешний корпус. Поскольку центральный вал, к которому прикреплены обмотки, является неподвижным, питание может подаваться непосредственно на обмотки, что устраняет необходимость в щетках и коллекторе.
Без щеток бесколлекторные двигатели изнашиваются намного менее быстро, чем коллекторные двигатели постоянного тока. Они работают с гораздо меньшим звуковым и электрическим шумом и способны работать на гораздо более высоких скоростях.
 Из чего состоит бесколлекторный двигатель постоянного тока
Из чего состоит бесколлекторный двигатель постоянного тока
Бесколлекторные двигатели постоянного тока только недавно начали использоваться в потребительских товарах и любительских проектах, потому что их сложно контролировать.
В то время как коллекторные двигатели постоянного тока для изменения полярности обмоток используют просто вращение самого двигателя, бесколлекторные двигатели постоянного тока управляются активно и требуют сложной схемы управления обмоткой, которая также должна масштабироваться при увеличении скорости.
Только благодаря тому, что микроконтроллеры стали дешевле и доступнее, стало возможным, чтобы недорогие системы могли удерживать правильную частоту вращения, необходимую для работы двигателя.
Достоинства бесколлекторных двигателей постоянного тока
Низкий износ
Единственным физическим интерфейсом между вращающейся внешней стороной корпуса двигателя и стационарными обмотками внутри являются шарикоподшипники, что означает, что бесколлекторные двигатели постоянного тока изнашиваются очень медленно.
Высокая скорость
Бесколлекторные двигатели имеют намного меньшее трение, чем коллекторные двигатели постоянного тока, поэтому они могут работать на более высоких скоростях.
Высокая эффективность
По сравнению с другими типами двигателей бесколлекторные двигатели обладают очень высокой эффективностью работы, что означает более низкое энергопотребление при той же выходной мощности по сравнению с коллекторными двигателями постоянного тока.
Недостатки бесколлекторных двигателей постоянного тока
Очень высокая сложность управления
Бесколлекторные двигатели постоянного тока для правильной работы требуют специализированных контроллеров и сложных алгоритмов управления.
Высокая цена
Стоимость самих двигателей не слишком высока, но когда добавляется стоимость контроллера, общая стоимость использования бесколлекторного двигателя постоянного тока в проекте становится относительно высокой.
Необходимость специализированных передач
В таких приложениях, как вакуумные пылесосы Dyson, бесколлекторные двигатели постоянного тока должны быть снабжены передачей для преобразования высоких скоростей до нужной скорости.
Создание и тестирование бесколлекторного мотора
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.

На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.
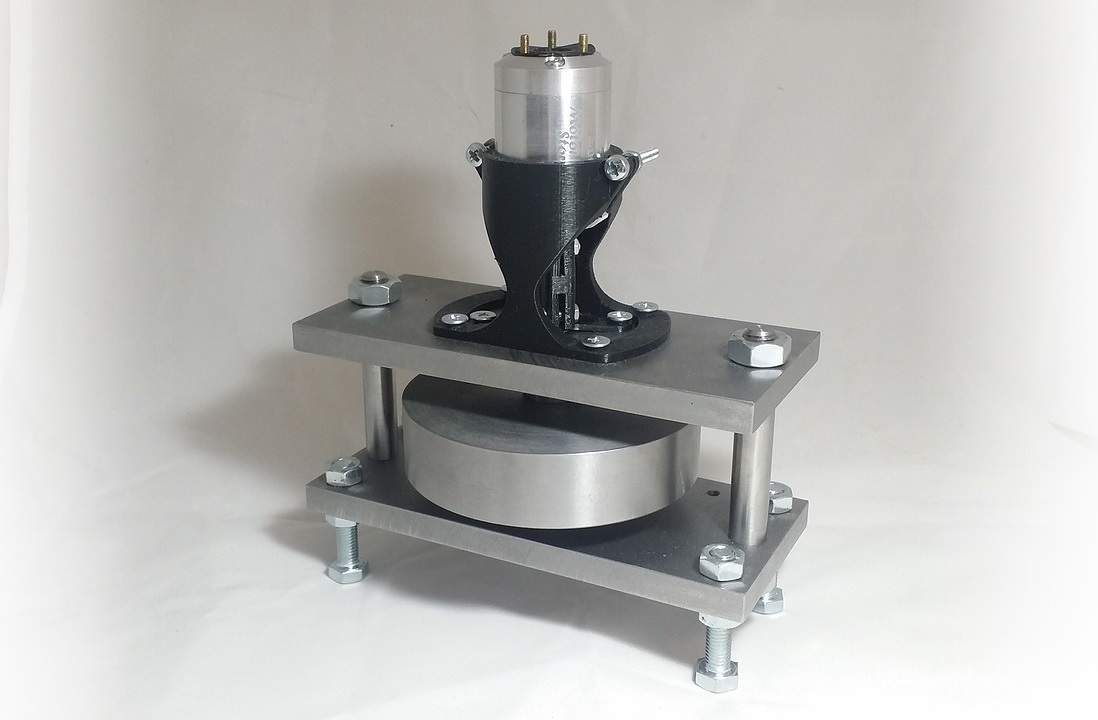
Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
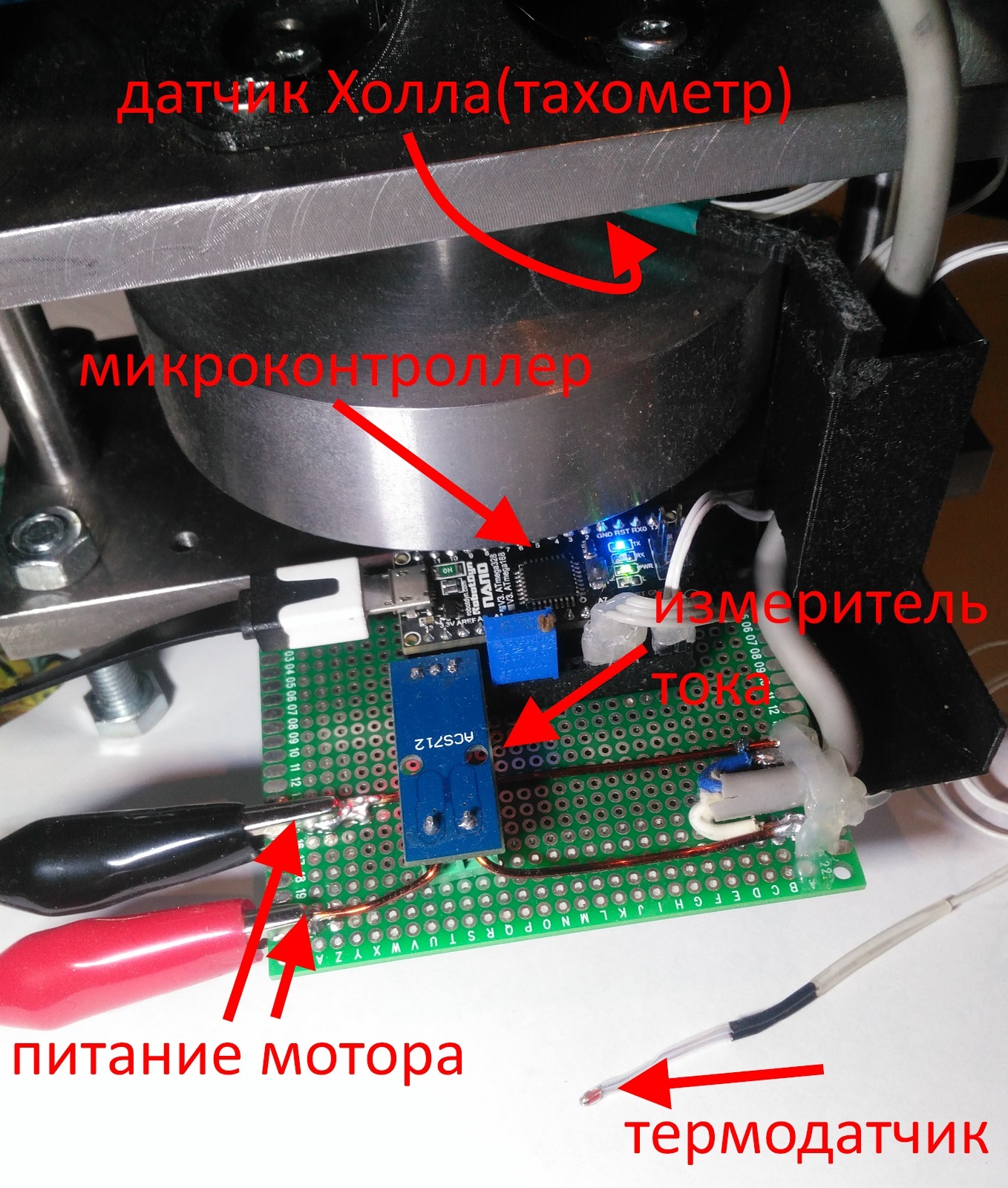
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
Бесколлекторный двигатель постоянного тока
Бесколлекторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.

Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). Большинство бесколлекторных двигателей постоянно тока — трехфазные , поэтому на статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
 |
 |
 |
 |
 |
 |
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла . Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя . Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
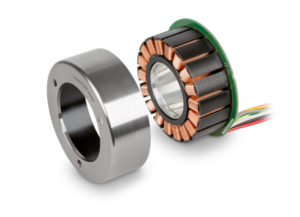
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.

Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).

Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).

Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.

Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.

Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.

Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).

Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.

Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.