Хочу стать инженером и собрать робота. У меня получится?
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу. Вместе с благотворительным фондом Олега Дерипаски «Вольное дело», реализующим программу по робототехнике для школьников, подростков и студентов, мы сделали простой гид для начинающих инженеров (впрочем, взрослым он тоже вполне может пригодиться). Объясняем, как собрать своего первого робота.
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.
Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Участники программы «Робототехника», которую поддерживает фонд Олега Дерипаски «Вольное дело», уже через несколько лет обучения могут создавать куда более сложные проекты и придумывают инженерные решения для самых разных задач. Например, разрабатывают системы для автоматической сортировки мусора. Если вам кажется, что всё это очень сложно, вы правы, но научиться этому может каждый.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка. Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.
Перед первой попыткой написать программу для робота достаточно разобраться, что такое цикл и условный оператор . Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Меня случайно не убьет током?
Нет. Если, конечно, вы не собираетесь начать сразу с постройки огромных промышленных роботов. Пока речь идет о небольших игрушках, сила тока и напряжение настолько малы, что даже если вас и ударит, то вы ничего не почувствуете. Самое страшное, что можно сотворить, конструируя маленького робота, — небольшой взрыв на столе. Но это случится, только если вы перепутаете «плюс» с «минусом» во время работы с электролитическим конденсатором.
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда. Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Самый первый — вряд ли. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой цель попроще. Например, на базе того же Arduino можно собрать самых разных движущихся роботов: они могут ездить просто вперед-назад, по сложной заданной траектории или по нарисованной линии. Робот, который самостоятельно объезжает препятствия или как-то еще меняет свое поведение при приближении к разным объектам, тоже посильная задача. Еще первый робот вполне сможет включать и выключать что-нибудь, ориентируясь на уровень освещенности, совершать какие-то действия в определенный момент, заданный таймером, или по нажатию кнопки.
Ну а в будущем, если продолжите заниматься робототехникой, сможете сделать и робота-помощника, и робота-охранника, который умеет стрелять. Еще можно собрать робот-пылесос собственной модели. В России и в мире постоянно проводятся соревнования по робототехнике, на которых роботы-участники сражаются, играют в футбол, участвуют в гонках и просто демонстрируют свои выдающиеся способности. Например, на «РобоФесте», который ежегодно организует фонд «Вольное дело», можно увидеть сотни разных роботов.
Умение собирать роботов как-то пригодится мне в жизни?
Да, еще как. Вы неизбежно научитесь программировать. Причем будете в состоянии не просто писать код, который что-то как-то делает, но и понимать всю цепочку, по которой набранные вами на клавиатуре символы преобразуются в действия целого механизма. Уметь программировать в наше время почти так же полезно, как знать английский язык: пригодится, даже если вы маркетолог или продавец мороженого.
Знание робототехники при желании позволит вам здорово усовершенствовать быт и даже сделать свое жилище «умным», не покупая дорогих готовых решений. Световой будильник? Запросто. Лампы с датчиками движения? Да легко. Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
А если мне понравится и я захочу сделать это своей профессией? Куда податься?
Самое очевидное решение — в программисты. Причем не обязательно туда, где работают непосредственно с «железом»: навыки, полученные во время занятий робототехникой, пригодятся в любой сфере — от промышленного до веб-программирования.
Если возникнет желание связать свою дальнейшую судьбу именно с роботами, придется получить соответствующее высшее образование. Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Как создать Боевого робота. Краткое руководство

Привет, Пикабу! На связи Лига Боевых Роботов. Сегодня у меня для вас краткое руководство по созданию боевых ботов. Этот материал написан на основе статьи от наших зарубежных коллег, написанной на английском языке. С оригиналом можно ознакомиться по этой ссылке.
Это не точный перевод. Мы убрали откровенную «воду» и добавили полезную информацию по теме. В данной статье основное внимание уделяется именно основам создания роботов, а не их устройству.
Выбор типа робота
О существующих типах боевых роботов и о весовых категориях можно прочесть в нашей статье «Боевые роботы. Типы и весовые категории». Там содержится вся информация, необходимая для выбора типа вашего первого робота. Настоятельно рекомендуем ознакомиться с ней перед прочтением этой статьи. Так же присоединяйтесь в нашему сообществу в ВК. Мы добавили несколько альбомов с фотографиями роботов в разных весовых категориях в качестве примеров.
Процесс проектирования
Теперь, когда вы выбрали тип робота, вы готовы начать проектирование и сборку!
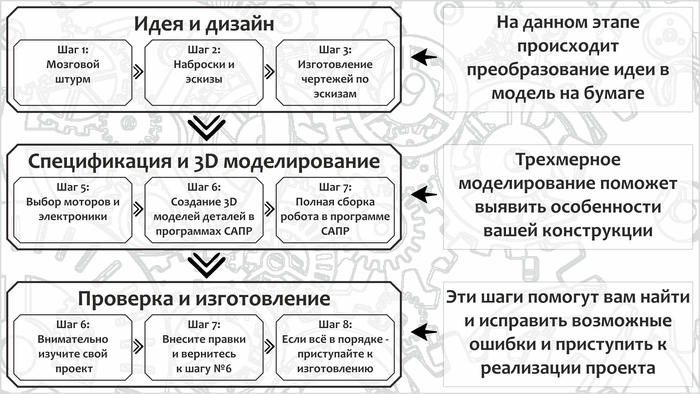
Залог создания хорошего робота – это серьёзный подход и проектирование. Многие хотели бы сразу взяться за инструмент и начать что -то строить. Но если попытаться обойтись без создания проекта робота в программе САПР, то итоговый результат вряд ли будет достойным. Такой робот наверняка получиться неэффективным, особенно, если это ваш первый опыт в таком деле. Программа САПР позволяет создать 3D модели всех деталей и создать т.н. сборку – полностью собранный проект робота в виртуальной среде. Это позволит не только получить 3D модели всех деталей со всеми размерами, которые будут идеально подходить друг к другу, но и произвести анализ напряжений, например, и вычислить объём и вес каждой детали, что очень важно, т.к. каждый робот должен вписываться в определённую весовую категорию. Потому создание робота нужно начинать именно с проектирования, хотя это может быть и не так увлекательно, как работа с материалами и сборка. Всё время, которое будет потрачено на проектирование, окупится с лихвой, в этом можете не сомневаться.
Шаг 1: Мозговой штурм
Процесс проектирования зачастую начинается с мозгового штурма. Первым делом, нужно определиться с типом оружия и весовой категорией робота. Далее нужно сделать следующие шаги:
· Найти и изучить все известные примеры таких роботов.
· Рассмотрите роботов с различными подвидами оружия, с разной бронёй и с различными системами привода.
· Попробуйте найти несколько видео, где можно будет посмотреть, как эти роботы показывают себя в бою.
· Обратите внимание на то, какие решения работают, а какие — нет.
После того, как вы достаточно разбираетесь в конструкциях интересующих вас роботов, начните объединять вашу идею в концепцию. Сделайте черновые наброски, на которых будут отображены желаемая форма шасси, оружия и т.д.
Вещи, на которых нужно сосредоточиться во время мозгового штурма:
3. Система привода
4. Общая форма корпуса
Во время мозгового штурма нужно записывать абсолютно все идеи, которые приходят вам в голову, просто для того, чтобы их не забыть. Возможно, большинство из этих идей вы не сможете применить при создании одного единственного робота, к тому же, некоторые идеи могут конфликтовать с другими. Но вполне возможно, что вы сможете реализовать эти идеи позже, когда решите собирать следующего бота, либо когда будете работать в команде над большим проектом. Кстати об этом. Создание действительно хорошего и эффективного робота – это, чаще всего, именно командная работа. В особенности это относится к средним и тяжёлым весовым категориям.
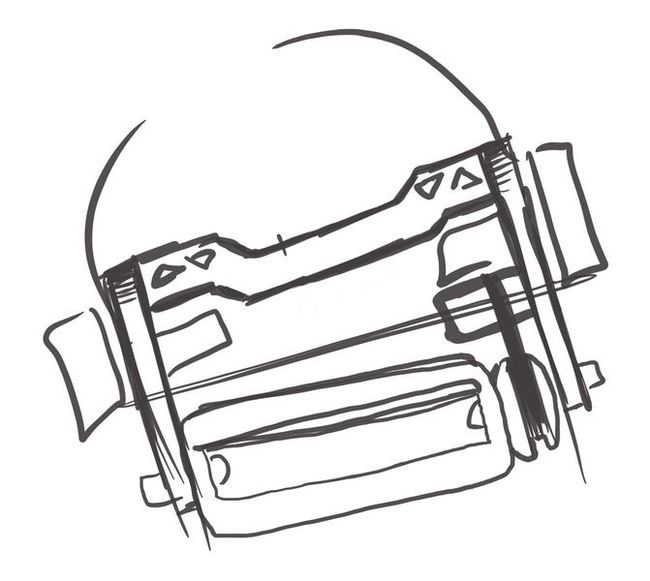
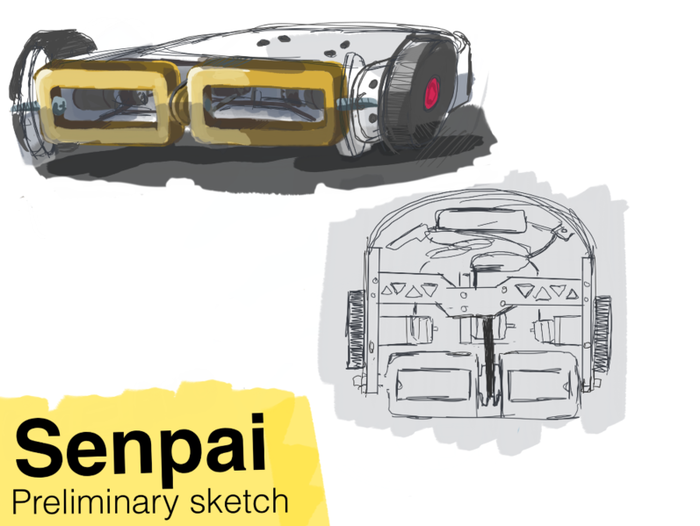
Шаг 2: Эскиз
С этого шага уже начинается проектирование робота. Первым делом можно прикинуть примерные размеры корпуса. Здесь можно отталкиваться от уже существующих роботов того же типа, и находящихся в той же весовой категории. Делаем первый эскиз:
После этого нужно создать ещё несколько, постепенно добавляя детали, такие как расположение колёс, моторов, оружия, предполагаемый тип привода, примерное расположение электроники и аккумуляторов, расположение внутренних структурных элементов и крепежа для электроники. Начинать нужно с самых важных узлов.
После того, как вы создали эскиз вашего бота, пора переходить к следующему этапу.
Шаг 3: Чертёж
Пора создать более подробные эскизы, или даже чертежи. Чтобы не создавать бота, в которого вы потом не сможете запихнуть желаемую начинку, на этом этапе желательно уже иметь на руках все основные комплектующие, такие как моторы, регуляторы и аккумуляторы, или хотя бы знать их размеры и вес. Тут всё взаимосвязано. К сожалению, мы ограничены стандартными моторами, редукторами и аккумуляторами. Да, их выпускается множество видов, самых разных размеров и форм, но очень часто, для определённой весовой категории, используется всего несколько типов моторов т.к. они подходят лучше всего. А производители аккумуляторов, например, не станут подстраиваться под нас, и делать на заказ несколько единиц аккумуляторной батареи нужного нам размера и веса. Это нам нужно отталкиваться от размеров и веса стандартных комплектующих.
На этом же этапе нужно определиться с материалами, из которых мы будем собирать робота. Как я уже говорил, каждый робот должен вписываться в выбранную весовую категорию, это основное требование. При создании роботов в различных весовых категориях используются множество различных материалов. В лёгких весовых категория, таких как «Жук» (1,5 кг.) и «Хобби» (5,4 кг.), часто используются алюминий, карбон, нейлон и пластиковые детали, напечатанные на 3D принтере. А в более тяжёлых категориях в основном используются износостойкие стали и титан. Подробнее о материалах мы будем рассказывать в наших статьях, посвящённых определённым весовым категориям.
Здесь я могу предложить использовать таблицу, которую я составил, основываясь на книге по созданию боевых роботов. Эта книга написана командой RioBotz в далёком 2009 году, создателями робота Минотавр, которого вы могли видеть на шоу «BattleBots». Книга доступна только на английском языке, но зато она распространяется бесплатно и её может скачать любой желающий. В этой книге просто уйма полезной информации. К сожалению, у нас пока нет ресурсов, чтобы перевести её на русский. Если вы владеете английским, или сможете осилить машинный перевод (который, к слову, вполне читабелен) то обязательно прочтите эту книгу. Книгу в оригинале можно скачать в нашей группе в разделе документы, или скачать с официального сайта.
Так вот, по поводу таблицы. Здесь представлены все основные весовые категории, ограничения по весу в каждой из них, а так же распределение веса по всем основным узлам. В книге это называется правилом «30,30,25,15». Подобное распределение веса между узлами позволяет собрать достаточно эффективного и сбалансированного бота. Обратите внимание, что в США и Англии максимальный вес для некоторых категорий отличается.
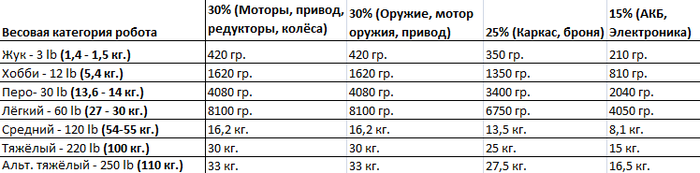
Безусловно, это не Аксиома, но это то, от чего можно отталкиваться. Например, зная вес моторов, аккумуляторов и регуляторов, которые вы хотите использовать, вы сможете узнать, сколько свободного веса у вас осталось на оружие и броню. Прикинув вес оружия, вы узнаете, сколько будет весить каркас и броня вашего робота. А это, в свою очередь, приведёт вас к выбору материалов и к толщине брони, которую вы сможете себе позволить. Да и в целом, знание веса, который вы сможете распределить на шасси, определённо внесёт коррективы в дизайн и размеры робота. Как я уже говорил – здесь всё взаимосвязано, на всех этапах создания робота.
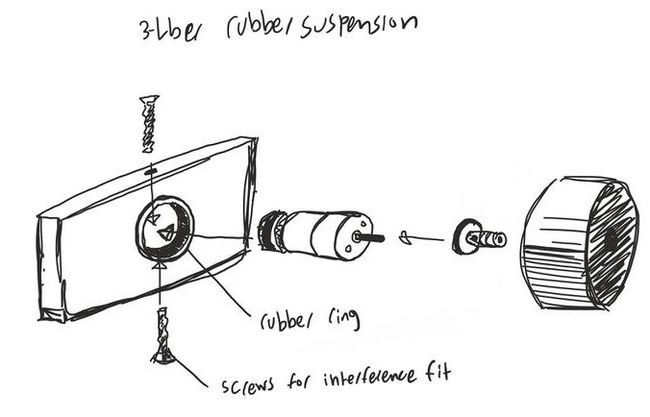
Для облегчения дальнейшего проектирования можно сделать наброски, на которых будут изображены отдельные узлы, конструкцию которых нужно продумать заранее.
Так же на общем чертеже можно прикинуть расположение структурных элементов и крепёжных отверстий в деталях. Нужно подумать над тем, из каких отдельных деталей и узлов будет состоять бот, и как всё это будет собираться в единое целое.
Шаг 4: Выбор моторов
При выборе мотора нужно учитывать 3 момента:
Характеристики мотора (ТТХ двигателя, которые заложены производителем, и которые нельзя изменить).
Дизайн вашего робота (форма и размеры вашего бота, которые вы можете изменить)
Желаемые характеристики (ТТХ собранного робота, такие как мощность оружия, скорость и маневренность).
Свойства мотора, от которых нужно отталкиваться:
KV (оборот \ вольт) — Это значение нужно умножить на напряжение аккумулятора, чтобы узнать максимальные обороты в минуту.
Мощность (W) — Это значение нужно знать, чтобы вычислить время раскрутки оружия до максимальных оборотов.
Максимальный ток (A) — От потребляемого тока зависит выбор регулятора. Чем больше потребляет двигатель, тем более мощный и тяжёлый регулятор оборотов потребуется для него.
Максимальное напряжение (V) — Максимальное напряжение, которое двигатель может выдержать, от него зависит выбор регуляторов и аккумулятора.
Размеры двигателя – это тоже важный момент. Чем больше размеры моторов, которые вы используете, тем больше будет корпус робота, который сможет их вместить. А чем больше корпус – тем тоньше будет броня, которую вы сможете себе позволить, ведь робот должен вписываться в ограничения по весу для своей категории.
Вес. Здесь всё аналогично предыдущему пункту. Чем тяжелее моторы, тем меньше веса вы сможете выделить на остальные части робота.
Обратите внимание, что некоторые продавцы указывают вес упаковки с мотором, а не самого мотора.
Кроме того, имейте ввиду, что большинство (если не все) характеристик мотора, которые указывает продавец или производитель, являются теоретическим максимумом. Скорее всего, на деле все характеристики будут ниже заявленных, но их всё ещё можно использовать для предварительных расчётов.
Характеристики вашего бота, которые вы можете изменять:
Передаточное число – это соотношение межу диаметром шкива (шестерни, звёздочки и т.д.) установленного на двигатель, и диаметром шкива, установленного на оружие, к примеру.
Для привода оружия и колёс, как правило, устанавливаются понижающие редукторы. Чем больше разница в диаметрах, тем выше коэффициент редукции. От коэффициента редукции зависит максимальная скорость вращения оружия, и максимальная скорость, с которой робот сможет передвигаться.
Момент инерции (J): Эта величина нужна для расчёта времени, которое понадобится для раскручивания оружия до заданных оборотов, а так же для вычисления силы удара этого оружия.
Итоговые характеристики, которые вам нужно знать:
Скорость вращения оружия (об\мин.).
Этот параметр является одним из основных для создания разрушительного оружия. Для вращающегося оружия сравнительно небольшого диаметра, например такого, как барабан, желательно использовать высокие обороты — от 8000 об\мин. и выше. Для более крупного и тяжёлого оружия, например такого, как вращающееся лезвие горизонтального Спиннера, обороты должны лежать в диапазоне от 2000 до 5000 об\мин. Тут всё зависит от массы и размеров оружия – чем больше скорость вращения тяжёлого оружия с большим радиусом, тем большую отдачу получит ваш робот при ударе. Это может повлечь за собой серьёзные структурные повреждения вашего робота. Разорвать вражеского бота пополам одним ударом – это здорово. Но какой в этом смысл, если от такого удара и ваш собственный робот разлетится на части.
Время разгона.
Это значение показывает, насколько быстро оружие раскручивается с нуля до максимальных оборотов. Первый удар в бою часто имеет решающее значение. Если вражеский бот столкнётся с вашим оружием до того, как оно наберёт максимальные обороты, то вы не нанесёте максимально возможный урон, а оружие будет снова раскручиваться с нуля, что даёт вражескому роботу время для манёвра. Потому очень важно, чтобы оружие раскручивалось до максимальных оборотов как можно быстрее. Для роботов в лёгких весовых категория, например, выход на максимальные обороты за 1 секунду считается хорошим результатом. Для ботов в более тяжёлых весовых категориях это могут быть 2 секунды. 3 секунды – это уже средний результат.
Кинетическая энергия (Дж)
Это значение представляет собой фактическую энергию, которую ваше вращающееся оружие будет производить и, следовательно, передавать другому роботу при ударе.
Вам потребуется вычислить ещё несколько значений, подробнее об этом мы напишем в отдельных статьях о расчётах силы удара оружия робота, и о подборе моторов.
Так же для примерных расчётов силы удара оружия можно использовать вот этот простой калькулятор.
Шаг 5: Создание 3D моделей в программе САПР
Этот шаг нужно выполнять одновременно с подбором моторов и других комплектующих.
Помните, что большинство деталей для роботов, особенно тяжёлых, часто изготавливаются на заказ. Если вы создали деталь, которую можно изготовить из большого бруска алюминия, например, но большая часть материала ( 50% и более) при этом будет превращена ЧПУ фрезером в стружку, то такие детали будут обходиться довольно дорого. Иногда лучше пересмотреть подход и попробовать оптимизировать процесс изготовления или упростить саму деталь, чтобы для её изготовления требовалось как можно меньше материала.
Вот несколько советов по созданию 3D моделей:
Расставляйте размеры таким образом, чтобы в любой момент можно было вернуться к самым первым шагам и изменить их. Для этого все размеры должны быть расставлены вручную, и не должны зависеть друг от друга там, где этого не требуется.
Используйте готовые 3D модели стандартных частей, таких как моторы, регуляторы и прочее, для своих сборок. Модели типовых деталей, которые используются чаще всего, можно найти в сети и таким образом сэкономить время.
Не забудьте указывать в свойствах детали материал, из которого она должна быть изготовлена, и его плотность. Это поможет легко вычислить точный вес детали ещё на этапе проектирования. Если этого не делать, то при постройке робота можно обнаружить, что вы едва собрали его наполовину, а его вес уже превышает максимально допустимый. Зная вес каждой детали в процессе проектирования, вы можете изменить её размеры, или вырезать окна облегчения, чтобы снизить вес, если это потребуется. Таким образом, даже не имея на руках основных деталей, таких как моторы, регуляторы и аккумуляторы, но зная их размеры и вес (указанные производителем) вы уже можете приступать к проектированию корпуса для вашего робота. Когда вы закончите сборку робота в программе, вам останется дождаться доставки всех деталей, проверить их размеры и вес и, если всё сходится, то можно будет приступать к изготовлению.
Шаг 6: Сборка проекта в программе САПР
Как только 3D модели всех деталей созданы, пора переходить к их сборке в единое целое. Важно создать полную сборку со всеми деталями, чтобы убедиться, что всё собирается и работает так, как и задумано. Далее небольшой список советов:
· Удостоверьтесь, что вес всех деталей, необходимых для сборки робота ниже, чем максимально возможный в той весовой категории, в которой будет выступать ваш бот.
· Учитывайте вес деталей, которые могут отсутствовать в сборке. Это могут быть провода, разъёмы, винты и прочие мелочи.
· Создайте сборки отдельных узлов робота, чтобы вы могли работать над несколькими из них параллельно.
· Не назначайте деталям случайные цвета и текстуры. Это может усложнить восприятие цельного проекта. Например, если деталь должна быть изготовлена из стали, то у неё должен быть соответствующий цвет и фактура.
· Не стоит недооценивать время, которое придётся потратить на сборку. Очень часто проблемы возникают уже после того, как всё собрано в единое целое, и на их устранение тоже может потребоваться время.
· Не вносите все поправки в одну единственную сборку, лучше сохраните несколько вариантов. Это позволит вернуться к старым версиям при необходимости.
После создания (или даже во время) сборки можно начать составлять список материалов и комплектующих. В такой список могут входить следующие пункты:
· Размеры стандартных листов материалов, которые можно купить, и размеры листов, которые необходимы вам для изготовления тех или иных деталей.
· Список и количество всех типовых деталей необходимых для сборки (помимо электроники), которые можно купить, такие как винты, подшипники, ремни и прочее.
· Ссылки на источники, где можно приобрести все необходимые материалы.
· Все необходимые замечания, связанные с деталями и материалами, просто чтобы не забыть.
Наличие такого списка позволит вам как можно быстрее приступить к созданию робота, сразу после завершения проектирования.
Шаг 7: Обзор проекта
Если вы создаёте робота в команде, а не в одиночку, то вероятно вам нужно будет продемонстрировать свой проект остальным товарищам, особенно, если вы новичок, а для создания бота будут использоваться материалы и оборудование, которые принадлежат всей команде. Ваши коллеги и наиболее опытные члены команды будут задавать вам вопросы по поводу вашего проекта, укажут на недостатки в конструкции и посоветуют, как их можно исправить. Критика вашего первого проекта может показаться излишне суровой, но не забывайте о том, что эти люди просто пытаются помочь вам создать лучшего бота. Проекты тяжёлых роботов обычно проходят 3-5 проверок до того, как они будут одобрены, т.к. тяжёлые роботы – самые дорогие в производстве, и любые ошибки в проектировании могут обойтись очень дорого. Так же важно делать заметки и записи во время таких проверок, просто чтобы не забыть все советы по устранению проблем.
Шаг 8: Постройка
Вот и всё, теперь вы готовы воплощать ваш проект «в металле». Во время сборки настоящего робота у вас может возникнуть необходимость внести небольшие изменения в конструкцию по тем или иным причинам. Очень сложно учесть все нюансы при моделировании на компьютере. Не забудьте внести эти изменения в вашу сборку в программе САПР, когда робот будет закончен.

9 постов 224 подписчика
Правила сообщества
Запрещено хамство и оскорбления, уважайте чужой опыт и труд.
@KorvinWorkshop привет! Я с деловым предложением
У нас на Пикабу есть Лига роботов. Лига роботов посты в нее регулярно падают, но админ неактивен с 2017 года. Не хочешь ли ты либо взять себе это сообщество, либо слить с твоим и тогда несколько расширить тематику?
а высоковольтное оружие запрещено? шокеры, тазеры и тому подобное
Куда как интереснее создать не боевого робота, «боевые качества » которого могут только рассмешить, а создать робота для общения с клиентами.
На стойку, бара, например.
Чтобы развлекал и завлекал клиентов. Может быть и наливал.
Боевые роботы. Типы и весовые категории
Всем привет! Сегодня хотелось бы поговорить о типах боевых роботов и о весовых категориях.
Если эта тема Вам интересна, то советую прочесть и другие посты в нашем сообществе Лига Боевых Роботов.
Итак. Существует множество основных типов вооружения боевых ботов. Перечислим основные и самые популярные из них.
Борец\ Хвататель (Grappler). Задача такого бота — схватить оппонента. Затем либо толкать на оружие, которое расположено внутри арены, либо сбросить в яму, если таковая имеется.

На фото: Робот «Overhaul» (США).
Крушитель (Crusher). Такой робот оборудован клювом из высокопрочной стали, который, чаще всего, приводится в действие гидравликой. Обычно это медленное, но мощное оружие, которое направлено на то, чтобы продавить броню вражеского бота и повредить начинку.

На фото: Робот «Quantum» (Англия)
Огнемётчик (Flamethrower). Тут всё просто – к роботу прикручен ГАЗОВЫЙ огнемёт (напалм использовать нельзя). Чаще всего огнемёт используется как дополнительное оружие.

На фото: Робот «Blacksmith» (США) . Основное оружие – молот. Дополнительное – огнемёт (встроен в молот).
Молот (Hammer). Робот с молотом. Либо с лёгким и быстрым, либо с медленным, но тяжёлым.

На фото: Робот «Shatter!» (США)
Поднимала\Подъёмник (Lifter). Такой робот оборудован подъёмным механизмом, которым он может приподнять и перевернуть вражеского бота (Зачастую и себя самого, при необходимости).
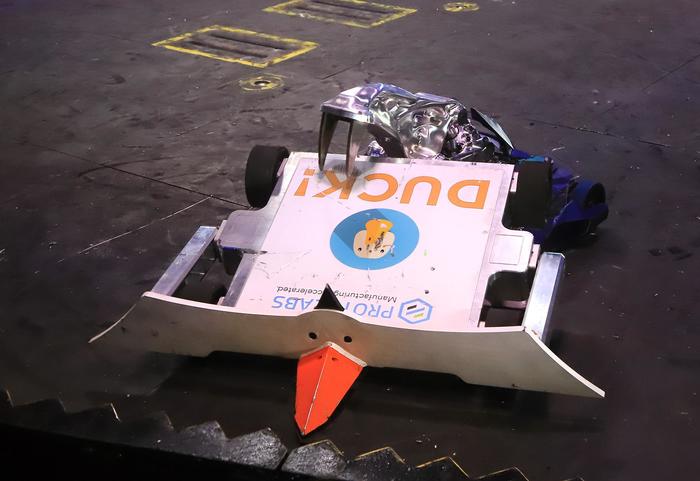
На фото: Робот «DUCK!» (США)
Опрокидыватель (Flipper). Робот оборудован пневматической (реже гидравлической) системой, которая выстреливает опрокидывающий ковш (или клин) вверх, что позволяет перевернуть противника.

На фото: Робот «Hydra» с гидравлической системой (США)
Существует разновидность «Опрокидывателя» под названием «Запускатель» (Launcher) – Это настолько мощный «опрокидыватель», что он может не только перевернуть противника, но и подбросить его в воздух. Хотя, то же самое могут сделать и многие «флипперы».

На фото: Робот «Bronco» с пневматической системой (США)
И вот здесь не всё понятно. И «Бронко» и «Гидра» могут подбросить противника, но относятся создателями шоу «Battlebots» к разным типам. Вероятно, это одно и то же, просто разные участники используют разные названия. Хотя, возможно, это именно современные «Опрокидыватели» стали настолько мощными, что превратились в «Запускателей».
Мультибот. Это участник, на стороне которого сражаются сразу несколько лёгких роботов, суммарный вес которых не должен превышать максимальный в этой весовой категории.

На фото: Роботы «The Four Horsemen» (Англия)
Пила (Sawbot). Робот, оборудованный пилой. Такие роботы редко наносят серьёзные повреждения противнику, но зато часто высекают гигантские снопы искр, которые могут впечатлить судей.

На фото: Робот «Skorpios» (США)
Барабанный спиннер (Spinner – Drum). Один из самых разрушительных видов оружия. Чаще всего вес барабана – это примерно треть от веса всего бота. Невероятно мощная штука.

На фото: Робот «Minotaur» (Бразилия)
Спиннер с вертикальным брусом (Spinner – Bar Vertical). Очень популярный сегодня тип вооружения. Напоминает робота – пилу. Но вместо диска по металлу или бетону, здесь устанавливается небольшая пластина (даже скорее длинный брусок металла) из высокопрочной стали. Формы и размеры пластин существенно различаются.

На фото: Робот «Bite Force» (США) Чемпион 2015, 2018 и 2019 годов.
Спиннер с горизонтальным брусом (Spinner – Bar Horizontal). В умелых руках это, наверное, самое разрушительное оружие из существующих. Как и в случае с барабаном, чаще всего вес его вращающейся рельсы составляет значительную часть от веса всего бота.

На фото: Робот «Rainbow» (Россия) Участник Battlebots 2019.
Цельнометаллический спиннер (Spinner – Full Body). Это спиннер, оружием которого является его собственный корпус. Его броня – это и есть оружие. Снаружи выглядит как диск, вращающийся вокруг вертикальной оси.

На фото: Робот «Gigabyte» (США)
Самыми распространёнными видами оружия сейчас являются: Барабан, спиннер с вертикальной рельсой, спиннер с горизонтальной рельсой и опрокидыватель. Чуть менее распространёнными являются: молот, цельнометаллический спиннер, подъёмник и крушитель.
У каждого типа есть свои плюсы и минусы, ботов с идеальным оружием пока не существует. Какой из них выбрать – зависит от навыков, имеющегося в наличии инструмента и, конечно же, от бюджета. Если вы ещё не смотрели шоу Battlebots — настоятельно советую посмотреть. Хотя бы сезоны 15,16,18 и 19 годов (В 2017 шоу не проводилось). Это даст вам представление о том, на что способен тот или иной тип оружия.
Теперь о весовых категориях. В США и Европе (в Англии, если точнее) есть своя организация, регламентирующая изготовление ботов и проведение соревнований. В США это «SPARC», а в Англии – «FRA». Если знаете английский, то сможете найти на сайтах этих организаций очень много полезной информации.
Начнём с США. Весовые категории, одобренные организацией «SPARC»:
Fairyweight (Фея) – 0.15 кг. (0,33 lb)
Antweight (Муравей) — 0.45 кг. (1 lb)
Beetleweight (Жук) – 1.4 кг. (3 lb)
Mantisweight (Богомол) – 2.7 кг. (6 lb)
Hobbyweight (Хобби) – 5.4 кг. (12 lb)
Dogeweight (Пёс\Собака) – 6.8 кг. (15 lb)
Featherweight (Перо\Пушинка) – 14 кг. (30 lb)
Lightweight (Лёгкий) – 27 кг. (60 lb)
Middleweight (Средний) – 54 кг. (120 lb)
Heavyweight (Тяжёлый) – 100 кг. (220 lb)
Alt Heavyweight Class (Альтернативный тяжёлый) – 110 кг. (250 lb)
На шоу «Battlebots» в США и на «Битвах роботов» в России сражаются именно роботы в категории до 110 кг.
Теперь весовые категории, одобренные Английской ассоциацией «FRA» (Fighting Robots Association):
Antweight (Муравей) — 0.15 кг.
Beetleweight (Жук) – 1.5 кг.
Featherweight (Перо\Пушинка) – 13.6 кг.
Lightweight (Лёгкий) – 30 кг.
Middleweight (Средний) – 55 кг.
Heavyweight (Тяжёлый) – 110 кг.
Как видите, в Англии весовых категорий почти вдвое меньше. Вес немного отличается и есть отличия в определении класса «Antweight».
Сейчас, когда наше сообщество только зарождается, нам, первым делом, нужно будет сформировать свой свод правил по изготовлению боевых роботов. Там будут определены весовые категории, разрешённые типы оружия и материалы, из которых можно изготовить бота. Так же всегда существуют и запреты на некоторые виды оружия и материалов, использовать которые не безопасно для окружающих (даже в рамках боёв роботов, внутри коробки из поликарбоната с толстыми стенками).
Вскоре мы переведём и опубликуем правила обеих Ассоциаций. Всё же опыт коллег нам сейчас просто необходим. Я думаю, что самый простой вариант – это внести необходимые поправки (если таковые потребуются) и просто принять на вооружение один из регламентов. Тот регламент, что существует для «Битвы роботов», которая ежегодно проводится в России, не совсем подходит. Просто потому, что это регламент конкретного мероприятия, а не Ассоциации создателей боевых ботов, которой у нас пока нет. К тому же, в существующем регламенте «Битвы роботов» обговорены только общие моменты, и он касается только тяжёлых ботов весом до 110 кг. Нам же нужен регламент, по которому можно будет создавать роботов во всех весовых категориях. Человек, который захочет создать робота должен быть уверен, что если он собрал робота по всем правилам, то его примут на любом чемпионате.
Позволю себе высказать свою точку зрения. Думаю, что нам будет ближе именно Английский регламент. Во -первых – по географическим причинам. Никто не поедет с карманным роботом на соревнования в США. А вот взять лёгкого робота и поехать на соревнования в Англию – это возможно (по крайней мере, для некоторых из нас).
К тому же мне нравится, что в Английском регламенте не так много весовых категорий. Сейчас – это хорошо для нас. Пока наше дело не столь популярно, нам не стоит распыляться. К слову, именно по этой причине в Английском регламенте не так много весовых категорий, как в Американском. Что лучше: 30 роботов в 8 -10 весовых категориях (по 3 в каждой)? Или те же 30 ботов в 3-х основных? Уже по десятку в каждой – можно проводить турнир. В Англии, например, наибольшей популярностью пользуются категории 150 гр., 1.5 кг, 13.6 кг и 110 кг.
Единственное, я бы добавил в наш список категорию Hobbyweight (Хобби) – 5,4 кг.
В Английском регламенте есть огромный провал между категориями 1.5 кг и 13.6 кг. Нужно что -то среднее. Тем более, что 13.6 кг робот – это уже довольно серьёзная и не дешёвая машина. Категория 5.4 кг. может быть переходным звеном – всё ещё не дорого, но уже и не игрушка. К тому же, робот в категории 5.4 кг. всё ещё достаточно прост и компактен, чтобы даже один человек смог его собрать и привезти на соревнования в одном чемодане, со всеми запчастями и инструментом для ремонта.
Думаю, что для начала нужно сосредоточиться именно на лёгких классах – 1.5 кг, 5.4 кг. и 13.6 кг. Ну и 150 грамм, конечно же. Первым делом новичку желательно собрать робота именно в этой весовой категории. Обходится он очень дёшево, и собрать такого миниатюрного бота можно буквально за день – два, особенно если под рукой есть 3D принтер.
В одной из следующих статей я постараюсь сделать небольшой обзор ботов в некоторых весовых категориях. Из чего они сделаны, какие комплектующие используются чаще всего и во сколько всё это обходится.
Спасибо, что дочитали до конца =) Обязательно напишите — что Вы думаете по поводу регламентов и весовых категорий. А так же о том, стоит ли переводить названия весовых категорий дословно. Или, может быть, их стоит адаптировать? Или просто использовать для обозначения вес?
Как сделать робота на ROS своими руками. Часть 1: шасси и бортовая электроника
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS. Это будет наш первый простой робот со своей операционной системой и первый опыт работы с ROS.
Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись.
Содержание
Введение
Создание свеого робота — это не самая сложная, но и не тривиальная задача. Она требует опредёленных навыков хотя бы на минимальном уровне:
- Работа с OS Linux.
- Твердотельное 3D-моделирование.
- Программирование на С++ или Python.
- Навыки 3D-печати.
Также вам понадобится персональный компьютер под управлением OS Linux, Windows и локальная сеть Wi-Fi.
Все исходники — как конструкторские САПР-файлы, так и исходный код — мы разместили в GitHub-репозитории https://github.com/amperka/abot.
Цель робота
Постройка робота начинается с идеи. Прежде чем бежать собирать своего робота, вам нужно ответить для себя на следующие вопросы:
- Как должен выглядеть мой робот?
- Из каких частей/сегментов будет состоять мой робот?
- Что должен делать мой робот и как?
Все промышленные роботы создаются с какой-либо целью. Люди стремится облегчить себе жизнь, переложив часть своих задач на роботов. Машины могут выполнять тяжелую физическую работу: например, как сварочные роботы-манипуляторы или транспортные роботы на автоматизированных складах-хранилищах. Или же роботы могут взяться за опасные для человека задачи: например, обезвредить бомбу вместо сапёра, работать в завалах или токсичных и ядовитых средах. А такие вещи, как робот-пылесос и беспилотный транспорт избавляют человека от рутинных задач для экономии времени.
Назначение робота практически полностью определяет его внешний вид, конструкцию и программу. Обычно робот, созданный для конкнретных задач в одной области, не способен работать в какой-либо другой. Цель создания нашего робота будет скорее обучающей и развлекательной, нежели практической.
Мы попробуем создать «офисного питомца» — робота, который будет жить с нами в офисе и передвигаться туда, куда мы ему скажем. При этом робот должен будет самостоятельно ориентироваться в помещении. Кажется, что навигация в офисе — это лёгкая задача, однако это совсем не так. Мы планируем постепенно добавлять нашему роботу новые функции, но начнём именно с этой конкретной задачи.
Поскольку мы решили, что наш робот не стационарный (как робот-манипулятор), а мобильный, то ему сперва понадобится какое-то подвижное шасси.
Привод робота
Типы приводов
Рассмотрим разные типы приводов мобильных роботов и выясним, какую механику они используют. Затем, сравнивая все плюсы и минусы, выберем привод для нашего робота.
Роботы могут передвигаться в 2D- или 3D-пространстве. Очевидно, что только летающие роботы способны маневрировать во всех плоскостях, и они чрезвычано сложны. Например, летающие дроны ориентируются в помещении или на местности, используя трёхмерные камеры глубины. Постройка такого робота потребует сложнейшего железа и программного обеспечения, поэтому летающего дрона мы не рассматриваем.
Если роботу нужно передвигаться только в двухмерном пространстве, всё становится уже проще. Мы можем рассмотреть движение робота как движение материальной точки в плоскости (X, Y) в прямоугольной или Декартовой системе координат (X, Y, Z).
Движение робота в плоскости может быть голономным (Holonomic) или неголономным (Non-holonomic). Что это значит? При голономном движении робот способен свободно двигаться по любому вектору XY, не меняя при этом своей ориентации. При неголономном движении робот может передвигаться только в нескольких ограниченных направлениях.

Например, обычный автомобиль не может взять и подвинуться строго вправо или влево с места — значит, его движение неголономно. С другой стороны, если бы у автомобиля вместо обычных колёс стояли всенаправленные, то он смог бы двигаться голономно.
Вы, наверное, спрашиваете себя: «Зачем мне всё это нужно знать?» Понимание того, каким именно образом движется робот, и понимание принципов получения проекций его скоростей в системе координат чрезвычайно важно при создании управляющей программы. Чем больше направлений движения и вращения имеет робот, тем сложнее сконструировать его механику и контролировать его движение.
Ещё одиним важным фактором при выборе привода робота является сложность получения одометрии и её точность.
Одометрия — это использование данных с установленных на роботе сенсоров и датчиков для расчёта его текущего положения и ориентации в пространстве. С некоторых приводов получить качественную одометрию очень легко — например, с двухколёсного дифференциального привода (2WD differential drive). Для этого достаточно парочки колёсных энкодеров. С других же приводов получить точную одометрию невероятно трудно: например, для шагающей робо-собаки или робота-гуманоида вам понадобятся десятки различных 2D/3D-сенсоров и сложнейший софт.
Мы попробовали собрать самые популярные способы передвижения для хобби-роботов.
Дифференциальный привод двумя ведущими колёсами с пассивными опорами
Двухколёсный дифференциальный привод — самый простой и распространённый тип привода в любительской робототехнике. Именно он используется в домашних роботах-пылесосах.
Двухколёсное дифференциальное шасси состоит из двух ведущих колёс, которые установлены на противоположных сторонах корпуса, и одного или нескольких всенаправленных (пассивных) колёс или опор. Каждое ведущее колесо приводится в движение собственным мотором и управляется независимо друг от друга. Пассивные колёса-опоры устанавливаются на такое шасси для достижения равновесия всей платформы.
К слову, именно такой тип привода имеют наши Робоняша и Драгстер.
Движение двухколёсного дифференциального привода неголономно. Перемещение робота здесь задаётся линейной скоростью по оси Х (вперёд или назад) и угловой скоростью вокруг оси Z (вращение на месте). Синтез этих двух скоростей заставляет робота поворачивать во время движения.
Вот основные типы движения такого робота:




- Легко сконструировать.
- Легко программировать контроллер движения.
- Легко получить относительно качественную одометрию всего двумя датчиками вращения колёс.
- Шасси не предназначено для движения по бездорожью. Любая значительная преграда на пути может вывести двухколёсную платформу из равновесия. Чаще всего это шасси используется в помещении и для движения по ровной поверхности.

Turtlebot3 от Robotis


Мобильный робот MP-500 от Neobotix
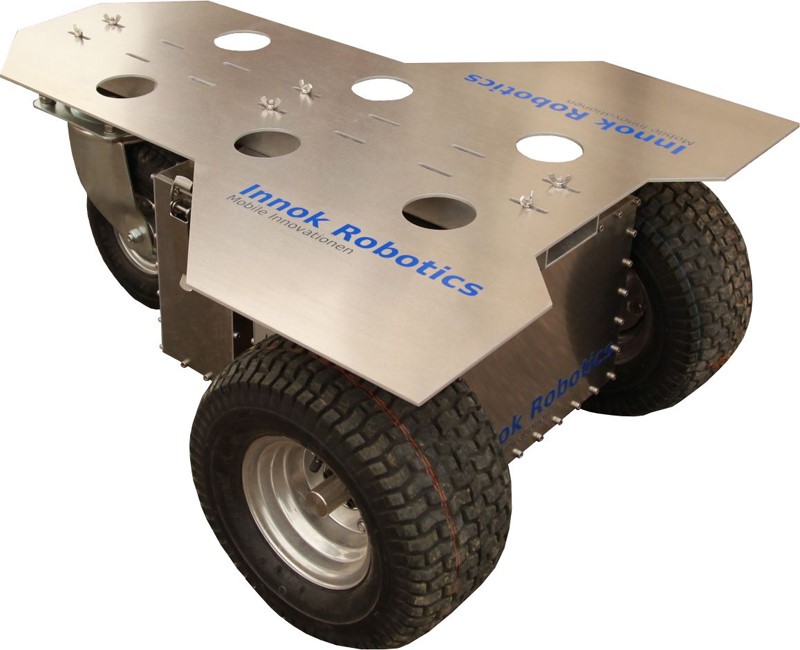
The Innok Robotics
Дифференциальный привод Skid-steer
Привод skid-steer — это расширенная версия простого двухколёсного дифференциального привода. В этом приводе равновесие платформы достигается не пассивными колесами, как в двухколёсном варианте, а дополнительными ведущими. На каждой стороне робота может быть четыре, пять, шесть и более колёс, которые управляются общим мотором через передачи и вращаются с одинаковой скоростью. Обычно в этом шасси используются два двигателя (по одному на сторону), но бывают плафтормы, где каждое колесо управляется собственным мотором.
Движение привода skid-steer неголономно. Принцип движения такой же, как и у двухколёсного дифференциального привода.
Пример задания скоростей робота:

- В сравнении с двухколёсной платформой skid-steer обладает повышенной проходимостью. Это достигается благодаря множеству колёс и отсутствию пассивных опор. Робот с большими колесами может быть очень эффективен на пересечённой местности.
- Одометрию так же легко получить, используя датчики вращения колёс. Однако каждое колесо шасси skid-steer нуждается в собственном сенсоре. Точность одометрии в сравенении с двухколёсной платформой заметно ниже. При поворотах робота колёса шасси проскальзывают. При движении такого шасси по ровной местности моменты заноса и скольжения можно определить и исправить программно. Но для получения одометрии при движении платформы skid-steer по пересечённой местности одних только датчиков вращения колёс может быть уже не достаточно.


Wild Thumper 6WD от DAGU Electronics

The Innok Robotics
Дифференциальный привод с гусеницами
Дифференциальный привод с гусеницами (танковое шасси) — версия привода skid-steer с гусеницами вместо дополнительных колёс. Как и ранее, каждая гусеница и сторона робота контролируется одним мотором.
Можно интерпретировать этот привод как двухколёсный дифференциальный, где колесо имеет некруглую форму и увеличенную длину окружности. Или как привод skid-steer с бесконечным количеством колёс на определённой длине.
Движение привода с гусеницами неголономно. Принцип движения тут такой же, как и у привода skid-steer. Только для обработки перемещения робота используются не угловые скорости колёс, а скорости гусениц.
- Танковое шасси обладает самыми высокими эксплуатационными характеристиками на пересечённой местности благодаря форме гусениц и сцеплению с землёй.
- Усложнённая механика. В конструкции танкового шасси множество непростых деталей: части трака, натяжители, опорные ролики и т. д.
- Получить одометрию ещё сложнее, чем при использовании привода skid-steer. При движении танкового шасси тоже происходят проскальзывания гусениц и заносы (особенно это заметно, когда робот-танк вращается на месте на ровной поверхности). Однако ввиду наличия всего двух датчиков вращения программно компенсировать ошибки одометрии очень тяжело. При движении по ровной поверхности одометрия неточная, а на пересечённой местности датчики вращения становятся практически бесполезны, и для одометрии понадобятся другие источники.


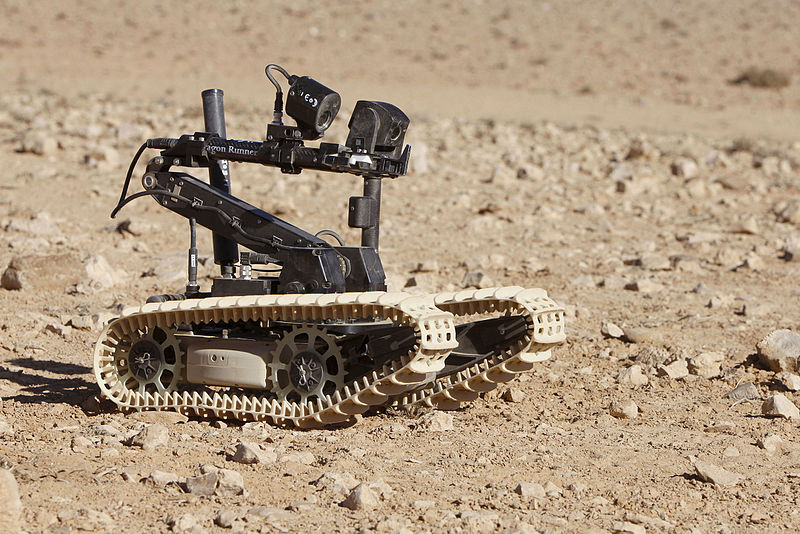
Dragon Runner Bomb Disposal Robot
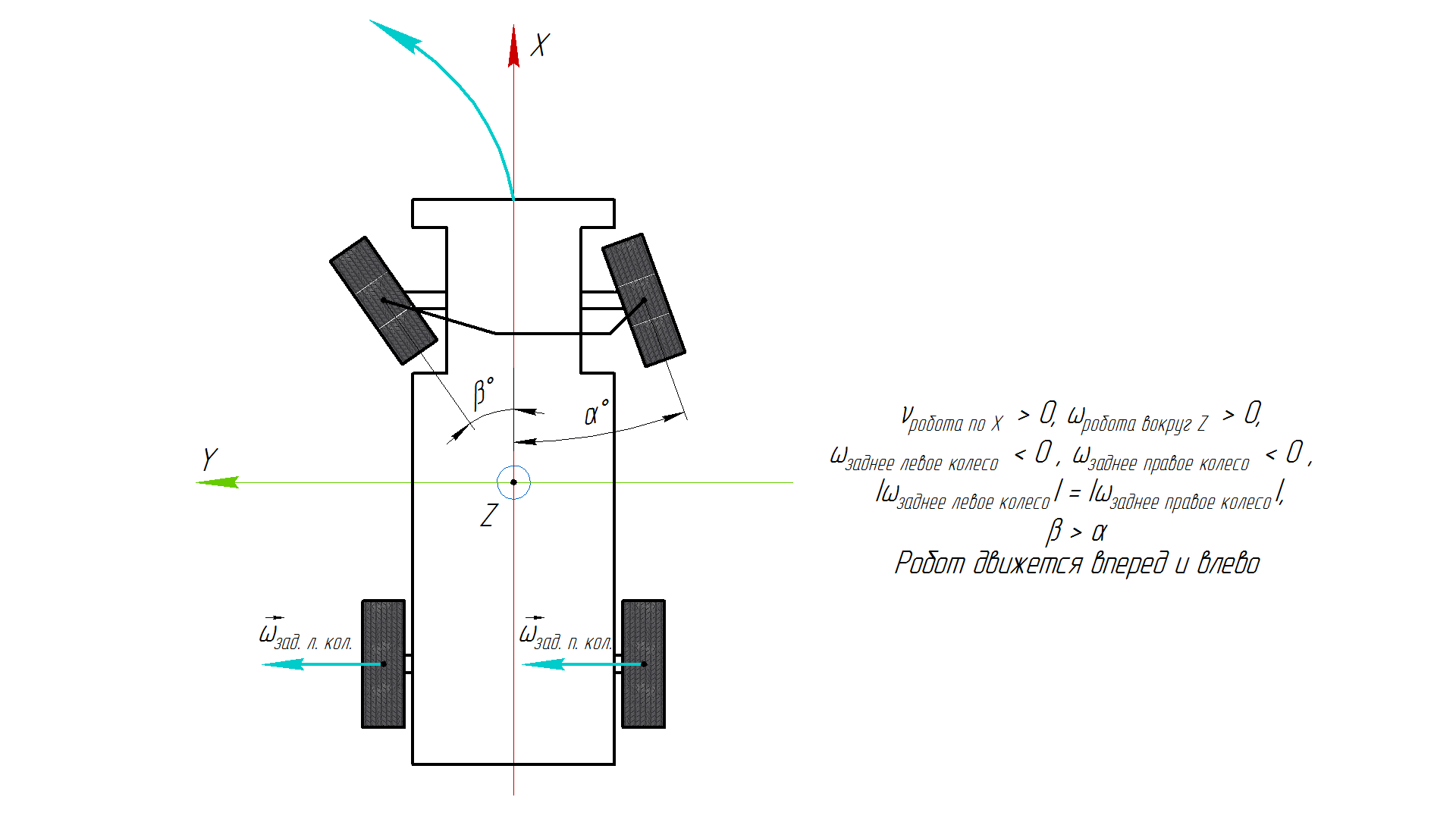
Рулевой привод Аккермана
Привод Ackermann steering — самый распространённый в мире, так как используется в каждом автомобиле. Привод Аккермана состоит из двух ведущих и двух рулевых колёс. Ведущая пара колёс отвечает за движение робота, а рулевые колёса отвечают за повороты. Чтобы избежать заноса и скольжения, рулевое управление Аккермана спроектировано таким образом, что при повороте внутреннее колесо поворачивается на больший угол, чем внешнее. Для каждого колеса угол поворота рассчитывается на основе желаемого диапазона углов поворота робота.
Рулевой привод Аккермана имеет неголономное движение. Этот привод управляется линейной скоростью вдоль оси X и угловой скоростью по оси Z. Но в отличие от дифференциальных приводов, при ненулевой угловой скорости вокруг оси Z линейная скорость по X не может быть равна нулю. Как и автомобиль, робот не сможет развернуться, стоя на месте.
- Рулевое управление Аккермана обычно используют на ровной поверхности для быстродвижущихся роботов, которые нуждаются в большом дорожном просвете и сцеплении с землёй.
- Наличие вращающихся рулевых колёс усложняет конструкцию робота и требует дополнительных двигателей и приводов.
- Отличный пример использования этого привода в робототехнике — настоящие беспилотные автомобили. Кроме того, этот привод используется в хобби-робототехнике, если робот построен на базе радиоуправляемой игрушечной машинки.


RB-CAR от Robotnik
Привод с Omni-колёсами
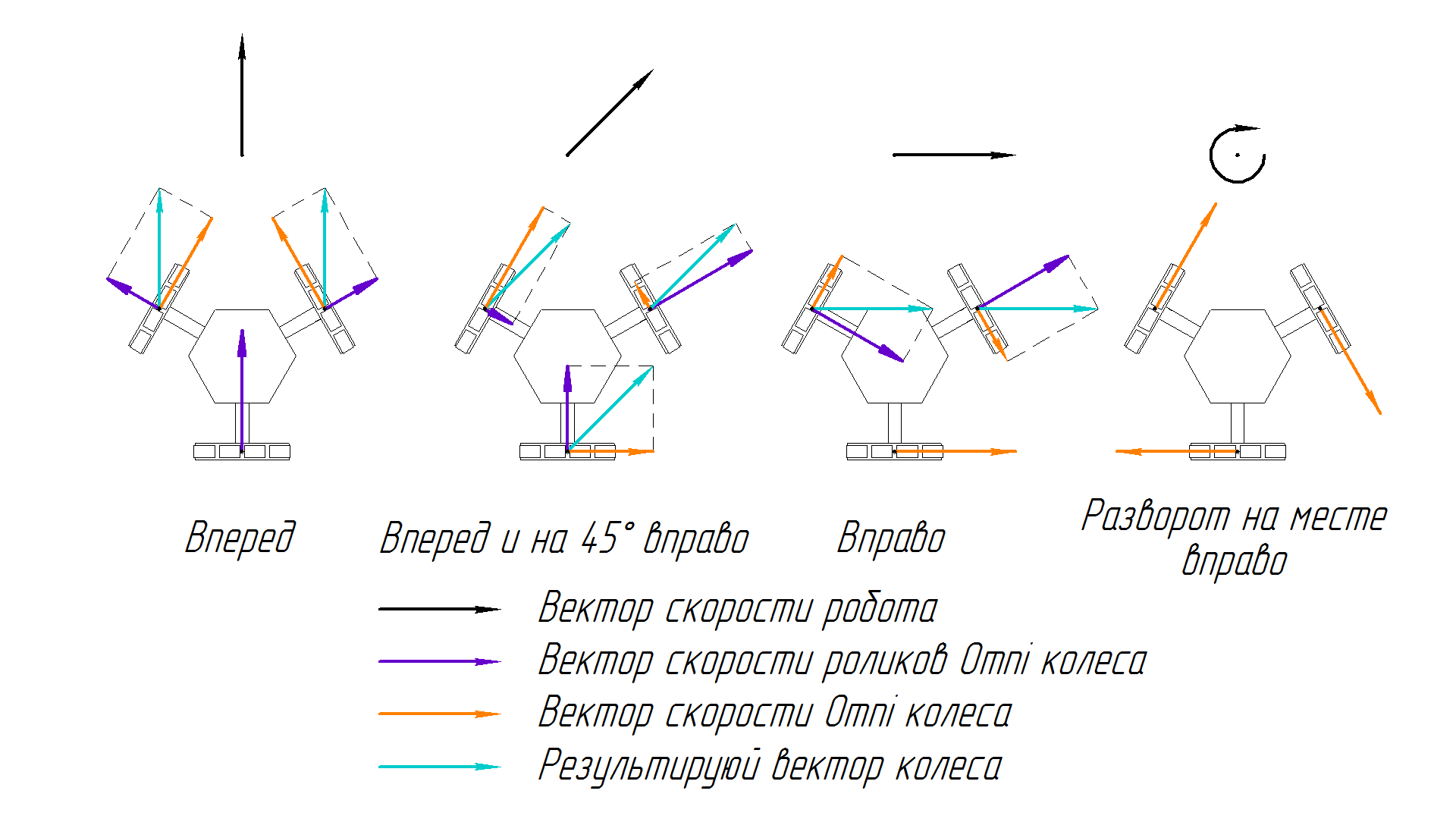
Этот тип привода использует особые Omni-колёса или поликолеса вместо обычных. Поликолесо — это всенаправленное колесо с небольшими роликами, расположенными по окружности. Оси роликов перпендикулярны оси вращения колеса. Контролируя скорость и направление вращения поликолёс, вы можете заставить робота двигаться в любом направлении — другими словами, сделать его движение голономным.
Обычно шасси с Omni-колёсами насчитывает ровно 3 или 4 колеса. Шасси с тремя колёсами обеспечивает большую тягу, поскольку любая реактивная сила распределяется только через три точки, и робот хорошо сбалансирован даже на неровной местности. Всенаправленные колёса имеют высокую стоимость, поэтому трёхколёсное шасси обходится заметно дешевле варианта с четырьмя.
Чаще всего для трёхколёсного шасси выбирают угол установки 120°. Иногда два колеса параллельны друг другу, а третье ставится перпендикулярно к ним. Последняя конструкция может быть более эффективной, потому что когда колёса расположены под углом 120°, только одно из них является ведущим, а два других по сути тормозят его, снижая общую скорость.
Поскольку колёса на таком шасси не выровнены по осям, каждое из них требует индивидуального расчёта скорости.
Пример определения векторов скоростей колёс для трёхколёсного шасси:
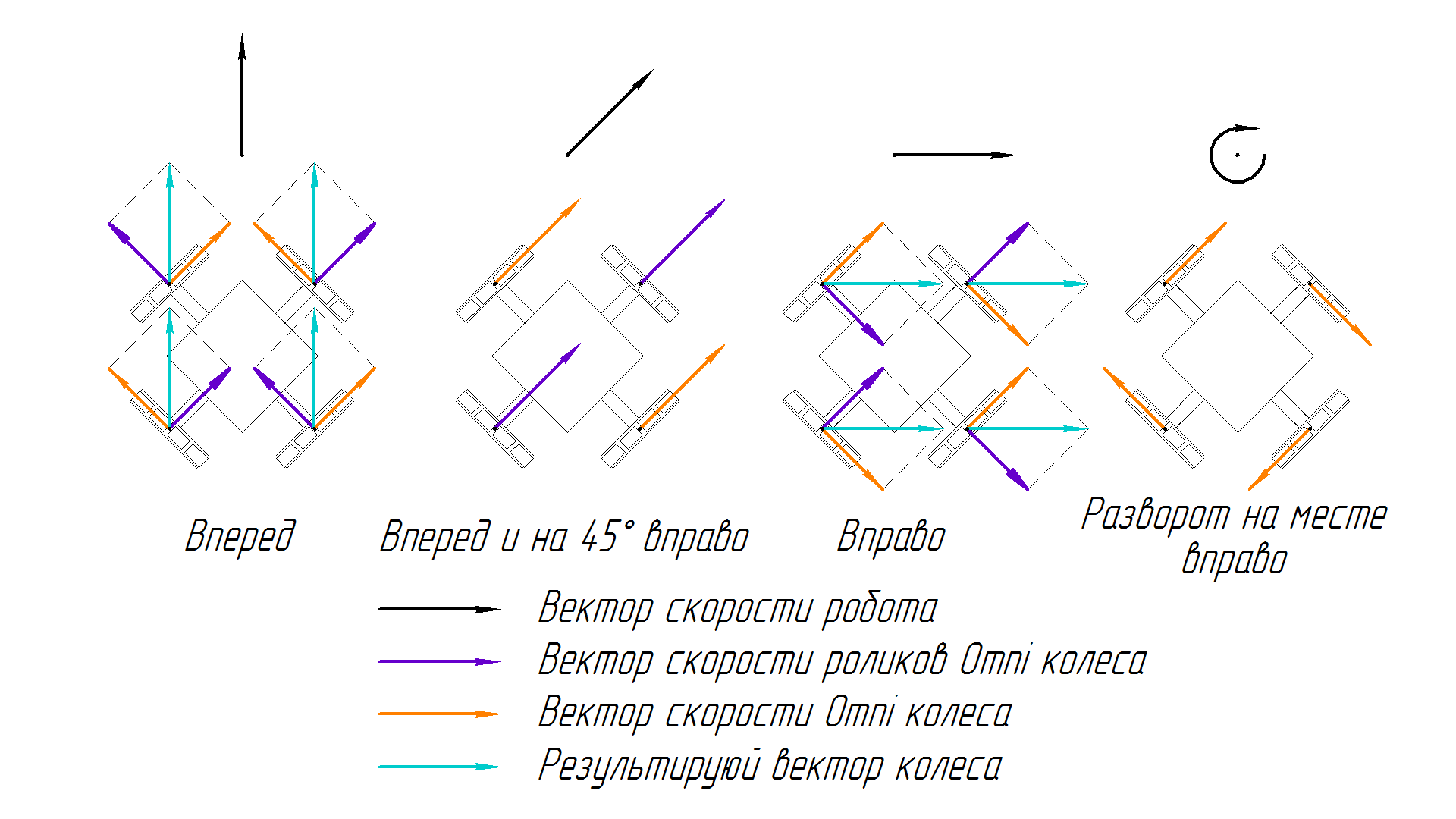
Четырёхколёсное шасси имеет четыре ведущих колеса, расположенных под углом 90° друг к другу. Эта конструкция удобнее для расчёта скоростей, так как два колеса параллельны друг другу, а два других перпендикулярны к ним. Как и в трёхколёсном шасси, КПД всех колёс также не используется на 100%. Но в отличие от трёхколёсного шасси, здесь есть два ведущих колеса и два свободных. Таким образом, четырёхколёсное шасси движется быстрее, чем трёхколёсное. Четвёртое колесо добавляет шасси ещё одну точку опоры, и на неровной местности одно из колёс робота может оказаться в воздухе.
Пример определения скорости вращения колёс для четырёхколёсного шасси:
- Поскольку всенаправленные колёса представляют собой комбинацию из множества роликов, возникает сопротивление вращению, что приводит к повышенному трению и значительным потерям энергии.
- Не все колёса являются ведущими, в каждый момент времени эффективно работают лишь одно-два поликолеса.
- С помощью Omni-колёс достигается голономное движение робота.
- Работа поликолёс изначально строится на принципах проскальзывания. Невозможно поставить датчик вращения на каждый ролик Omni-колеса, поэтому полученная колёсная одометрия совсем неточная.
- Чаще всего роботы с таким шасси используются внутри помещений на ровных и гладких поверхностях.

3WD Omni wheel chassis от NEXUS robot
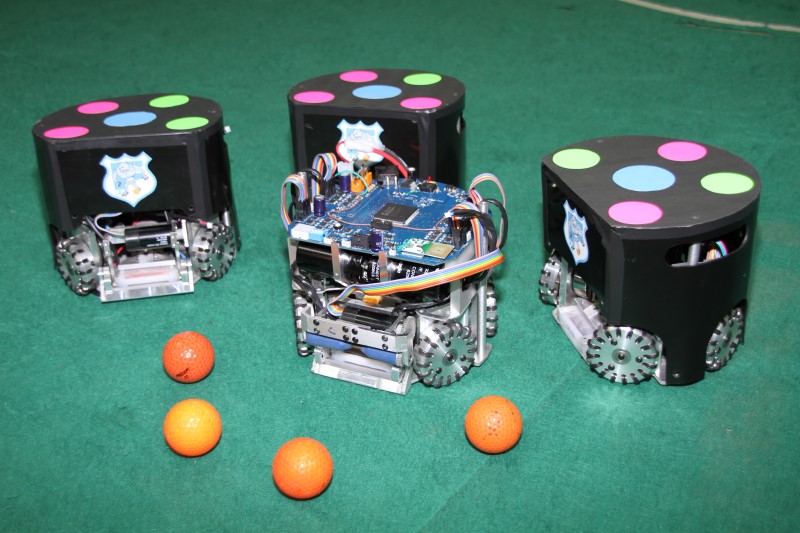
Soccer robots от RoboFEI Team

King Kong 4WD Omni Wheel chassis
Привод с Mecanum-колёсами
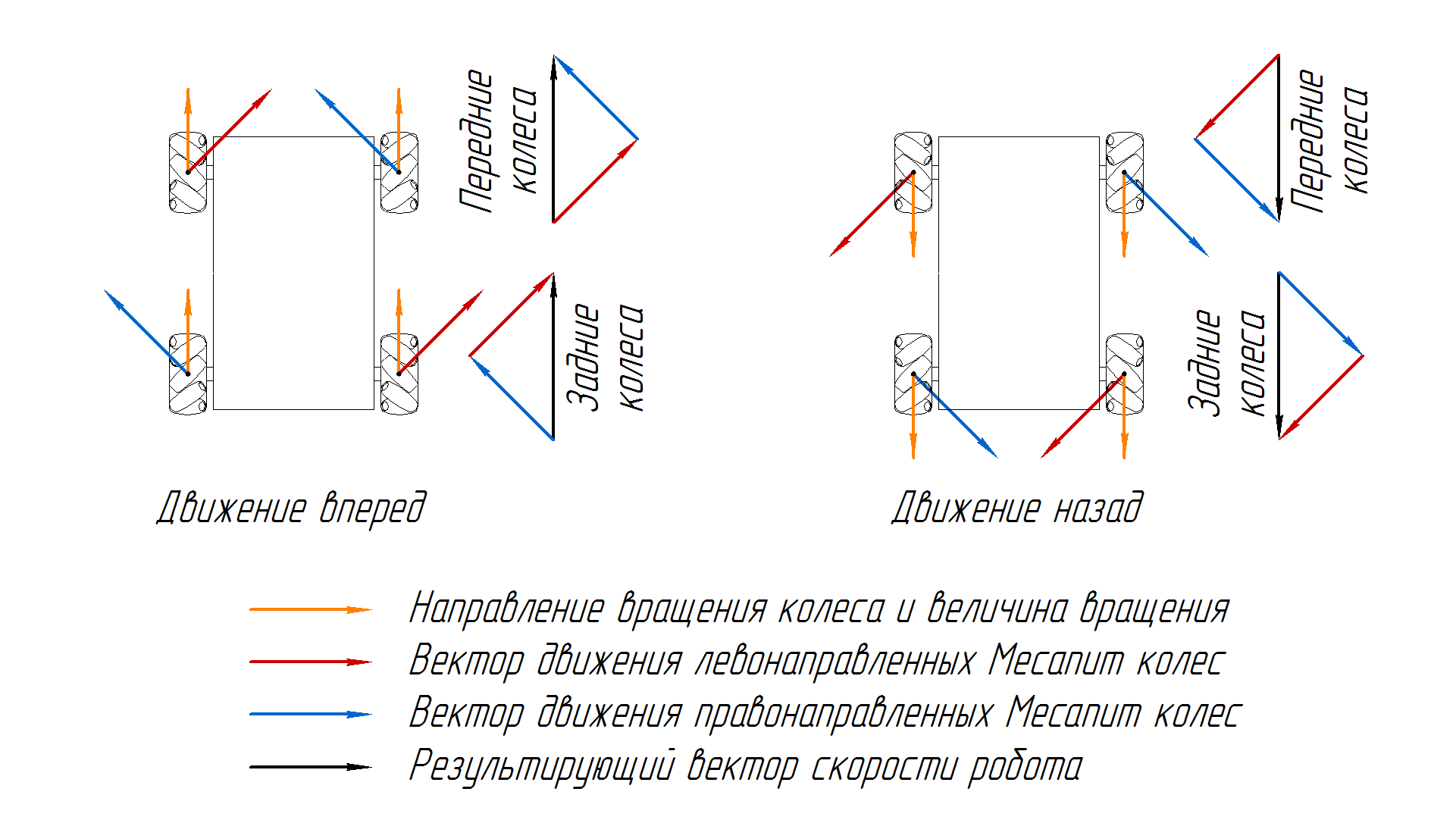
Этот тип привода использует вместо обычных колес колёса Mecanum (шведское колесо Илона), предназначенные для грузоподъёмных и проходимых роботов. По сути это разновидность Omni-колеса, только на шведском колесе Илона ролики по всей окружности обода расположены под углом 45° к плоскости и 45° к оси вращения колеса.
Поворот оси ролика позволяет использовать колёса Mecanum в приводах skid-steer. Эта комбинация объединяет преимущества шасси skid-steer и привода со всенаправленными колёсами. Колёса Илона заменяют обычные для достижения голономного движения робота. Чаще всего этот тип шасси имеет 4 Mecanum-колеса, но иногда встречается и 6 колёс.
При вращении колеса Илона прилагается сила под углом 45° к его оси. Направление вращения определяет направление приложенной силы. Комбинации сил от всех колёс позволяют роботу двигаться в разных направлениях.
Вгляните на схемы получения скоростей робота:



- Привод с колёсами Илона используется, если робот должен обладать голономным движением и высокой грузоподъёмностью.
- Чаще всего этот тип шасси встречается у грузовых роботов, которые работают на ровной и гладкой поверхности. При использовании такого шасси на бездорожье управление движением и получение качественной одометрии с датчиков вращения колеса крайне затруднено.


Mobile Robot MPO-500 от Neobotix

SUMMIT-XL STEEL от Robotnik
Скелетные роботы
Эти роботы используют конечности или ноги, чтобы перемещаться. Движение таких роботов имитирует естественное движение живого организма.
Роботы на конечностях обладают голономным движением, также как и живые организмы, кинематику которых они повторяют. Например, робот-гексапод может идти в любом направлении, не меняя ориентацию своего тела.
Подобные роботы являюстя самыми мобильными, но и самыми сложными в конструировании. Скелет конечности должен обладать множеством стенепенй свободы. Для этого требуется множество двигателей и приводов, а также сложные системы управления. Из-за большого количества приводов скелетные роботы потребляют больше всего энергии. Для получения одометрии с шагающего шасси используется синтез данных с множества различных сенсоров (энкодеры приводов, IMU-сенсоры, 3D-лидары, 3D RGB-камеры глубины, контактные датчики давления и т. д.), а также машинное обучение.


Spot от Boston Dynamics
Другие типы приводов
В хобби-робототехнике существует великое множество уникальных приводов движения, которые используются крайне редко. Вот лишь некоторые из них:
- Segway drive — дифференциальный двухколёсный привод без пассивных колес. Равновесное состояние робота достигается с помощью датчиков и контроллеров. Пример — автономный сегвей.
- Forklift steering drive — разновидность рулевого привода Аккермана, но с задней парой рулевых колёс и передней парой ведущих.
- Independent drive — привод, в котором все колёса являются ведущими и рулевыми одновременно. Колёс может быть четыре, шесть и более. Пример — марсоход.
- Articulated drive — разновидность рулевого привода Аккермана. Чтобы рулить роботом в движении, Articulated drive не поворачивает рулевые колёса, а деформирует всю рулевую часть рамы или шасси.
- Ball drive — привод, при котором робот балансирует и перемещается на сфере.
- Ползучие червеобразные и змееподобные роботы, движение которых основано на трении тела с поверхностью.
Выбор шасси
Шасси робота напрямую зависит от типа привода. Мы выбрали двухколёсный дифференциальный привод с пассивными колёсами — такой же, как в домашних роботах-пылесосах, а они как никто лучше справляются с задачей ориентации в помещении. Кроме того, это самое бюджетное и самое простое в программировании шасси.
При выборе типа привода мы руководствовались эффективностью колёсной одометрии. Самая простая и доступная одометрия для вашего робота — это датчики вращения, установленные на колёсах. Обычно такие датчики скорости представляют собой энкодеры, установленные на валах колёс, валах двигателей или коробок передач.
Сперва мы попробовали танковое шасси Rover 5 с резиновыми гусеницами. Установили дополнительные двигатели и энкодеры на колёса. Но, как оказалось, получить качественную одометрию только с помощью энкодеров довольно сложно. Когда робот вращается на месте и на высоких скоростях, гусеницы регулярно проскальзывают и результирующая одометрия отличается от фактического положения робота. Поэтому мы решили начать с более простого шасси.
Вы можете сначала выбрать тип привода, который вам нравится, а затем самостоятельно построить подходящее робо-шасси. Или наоборот, купить готовое шасси для робота и написать программу-контроллер под него.
Чтобы самостоятельно собрать качественное робо-шасси, нужно обладать некоторыми навыками проектирования машин, разбираться в материалах, комплектующих и умело работать руками. Собранное своими руками шасси даёт вам полное знание всех его деталей, узлов, ключевых моментов и слабых мест. Чем сложнее тип привода и шасси, тем больше вероятность, что вам придётся конструировать его самостоятельно.
С другой стороны, многие производители предлагают высококачественные шасси для хобби-робототехники. Приобретя готовое шасси, вы сможете сэкономить много времени на механической составляющей робота и потратить это время на электронную и программную часть.
Это важно! При покупке готового шасси выбирайте наиболее документированное, с маркировкой деталей, информацией о двигателях и полными чертежами основных деталей и компонентов в САПР.
Шасси Turtle
В нашем роботе мы решили использовать робо-платформу Turtle от DFRobot.

Это шасси для небольшого мобильного робота. Рама изготовлена из металла и состоит из двух согнутых листовых металлических пластин. Обе пластины имеют перфорацию и вырезы для установки электроники. Шасси содержит два мотор-редуктора (160 об/мин, 6 В) типа TT с двухсторонним валом L-образной формы, два пластиковых колеса диаметром 65 мм и 15-миллиметровое стальное шариковое колесо. В комплект шасси входит ещё много других деталей и креплений, но они нам не нужны. Понадобится только рама шасси.

Шасси Turtle недорогое, но и не самого лучшего качества:
- Данная робо-платформа слабо документирована. Мы не нашли чертежей шасси в открытом доступе.
- Покрышки колёс, которые идут в комплекте, пластиковые и бесполезные, потому что у них почти нет сцепления с землёй. Мы сразу же заменили их резиновыми шинами для 2WD и 4WD от того же производителя.
- Коробки передач моторов типа TT имеют пластиковый редуктор 1:120. Было бы лучше, если коробка передач была сделана из металла.
- Двигатели постоянного тока работают без обвязки и генерируют значительные электромагнитные наводки. На полной скорости эти двигатели существенно влияют на работу близлежащих аналоговых и цифровых электронных устройств.
Подводя итог, можно сказать, что это шасси — не предел мечтаний, но оно доступно и популярно в хобби-робототехнике. Выбирая недорогое шасси, будьте готовы отдельно приобрести важные детали и комплектующие, или же изготовить их самостоятельно.
Энкодеры
Для колёсной одометрии нам понадобятся датчики угла поворота или энкодеры. Готовые шасси часто уже оснащены энкодерами, но платформа Turtle поставляется без них. По типу отдаваемых данных энкодеры могут быть абсолютными или инкрементальными.
Абсолютный энкодер выдаёт сигнал, который однозначно соответствует углу поворота вала. Энкодеры этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
Инкрементальный энкодер генерирует импульсы на выходе. Контроллер подсчитывает количество импульсов с помощью счётчика и определяет текущее положение вала. Сразу после включения контроллера положение вала неизвестно. Для привязки системы отсчёта к нулевой позиции существует специальная нулевая отметка, через которую вал должен пройти после включения. Основным недостатком энкодеров такого типа является невозможность определить пропуск импульса, вызванный какой-либо причиной. Пропуски импульсов накапливают погрешность в угле поворота вала до тех пор, пока не будет пройдена нулевая отметка. Инкрементальный энкодер может быть и без нулевой отметки. В этом случае отсчёт импульсов, полученный в начале накопления, является началом системы отсчёта.
По принципу действия энкодеры могут быть оптическими, магнитными и механическими. Оптический энкодер использует свет, который падает на фотодиод через щели в металлическом или стеклянном диске, установленном на вращающемся валу. Механический энкодер также имеет вращающийся диск, но здесь угол считывают механические переключатели или контакты. Магнитные энкодеры содержат магнит на вращающемся валу. Эти энкодеры используют датчики Холла для считывания вращения вала с магнитом.
В основном в хобби-робототехнике используются оптические и магнитные инкрементальные энкодеры или магнитные абсолютные энкодеры. Не критично, какой тип энкодера вы будете применять. При выборе энкодера основными параметрами являются количество каналов передачи данных, количество импульсов на оборот (PPR) и максимально допустимая скорость вращения вала.
Наиболее популярны квадратурные энкодеры с двумя каналами А и В. Реже у энкодеров в хобби-сегменте есть канал с нулевой отметкой — Z. Чем выше значение PPR, тем меньше угол поворота вала, который может зафиксировать датчик. Чем точнее энкодер, тем точнее одометрия робота, поэтому не пренебрегайте высококачественными энкодерами и не используйте энкодеры с низким значением PPR. Максимальная скорость вращения может быть любой, так как большинство энкодеров способно работать на очень высоких скоростях. Скорее всего, скорость вращения, которую вы будете измерять, будет в несколько раз меньше максимальной. Даже если вы планируете использовать высокоскоростные BLDC двигатели с высоким значением kv, то существуют энкодеры, которые работают с максимальными скоростями 28000 об/мин, 60000 об/мин или даже больше.
Если вы используете двигатель с коробкой передач, установите поворотный энкодер на вал двигателя, а не на вал колеса или коробки передач. Это важно. Эта настройка уменьшает минимальный читаемый угол поворота колеса и делает вашу одометрию более точной. Энкодеры могут устанавливаться и на оси передач и редукторов, но обычно это делается в приводах скелетных роботов.
Мы обзавелись двумя такими двигателями с энкодерами — мотор-редуктор TT с энкодером (160 об/мин, 6 В, 120:1).
Как собрать робота самостоятельно в домашних условиях: от простого к сложному
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.