32. Основные схемы включения дпт. Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
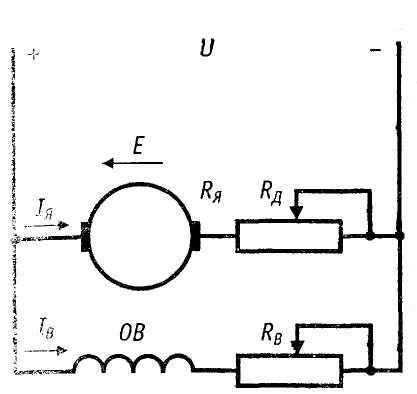
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
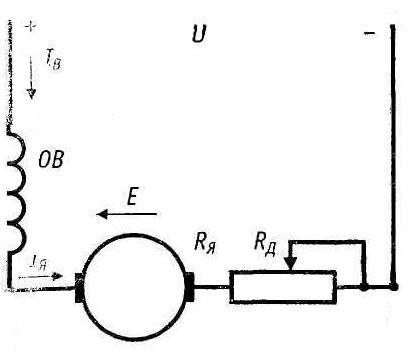
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
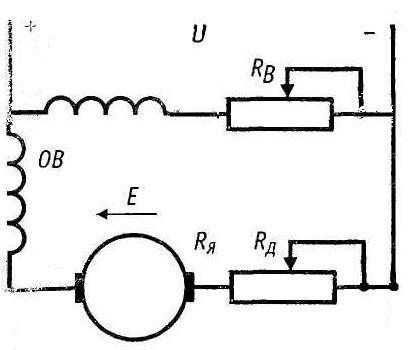
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
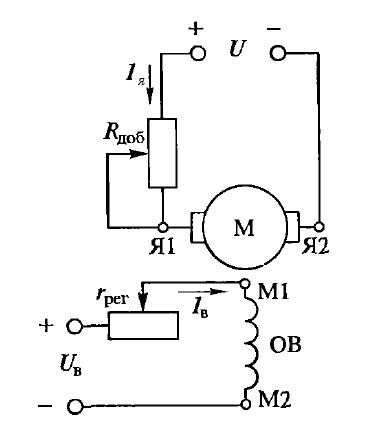 Рисунок 1
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
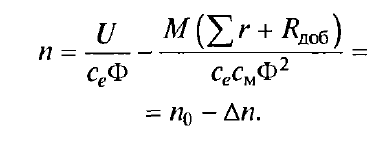
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
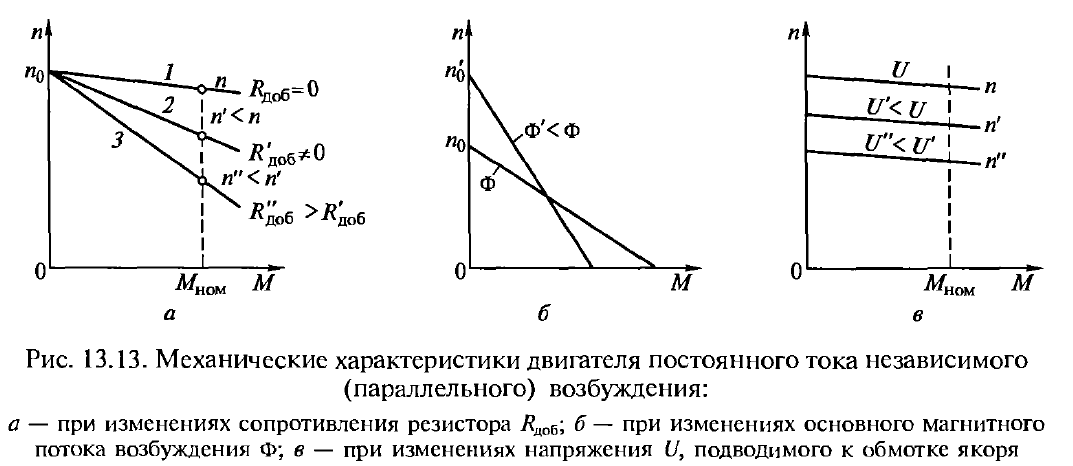
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
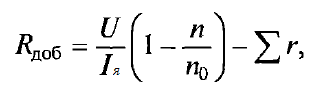
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
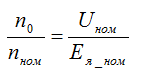
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)

Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Двигатель постоянного тока независимого возбуждения принцип работы
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
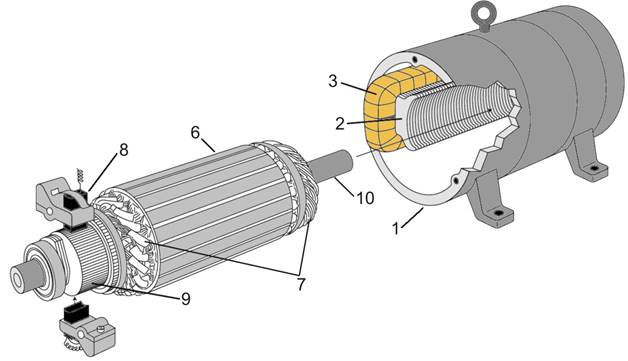
Рис. 1. Внешний вид двигателя постоянного тока
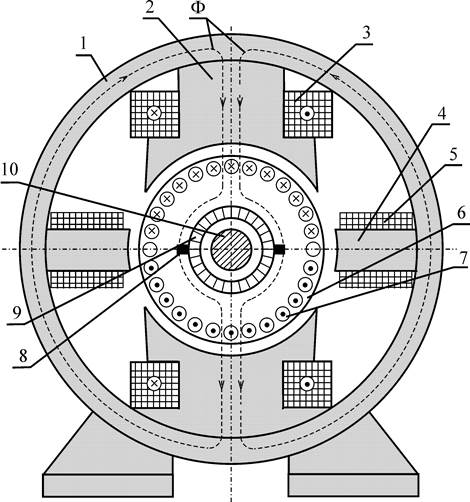
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
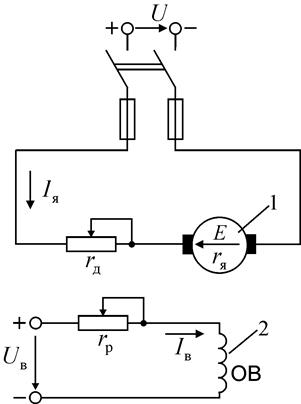
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов и скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Дата добавления: 2016-06-29 ; просмотров: 7450 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Обмотки возбуждения и якоря этого двигателя питаются от разных источников (рис. 2.3,а). Где UB и IB – напряжение источника питания и ток обмотки возбуждения; U и IЯ – напряжение источника питания и ток якоря. Функцию обмотки возбуждения у таких двигателей может выполнять и постоянный магнит (рис. 2.3,б).
Д ля двигателя с независимым возбуждением величинаСМ Ф = const, поэтому вид электромеханической и механической характеристики в соответствии с (2.4) и (2.5) будет один и тот же (рис. 2.3).
ля двигателя с независимым возбуждением величинаСМ Ф = const, поэтому вид электромеханической и механической характеристики в соответствии с (2.4) и (2.5) будет один и тот же (рис. 2.3).
Характерные точки характеристик
1 . ПриIЯ = 0 и М = 0; ω = ωхх (ωхх – скорость холостого хода двигателя). В режиме холостого хода механическая нагрузка на валу двигателя отсутствует.
. ПриIЯ = 0 и М = 0; ω = ωхх (ωхх – скорость холостого хода двигателя). В режиме холостого хода механическая нагрузка на валу двигателя отсутствует.
2. При ω = 0; IЯ = IП и М = МП (IП и МП – пусковой ток и пусковой момент двигателя). В литературе их иногда называют как IКЗ и МКЗ (током и моментом короткого замыкания), т.к. режим короткого замыкания для электродвигателя соответствует неподвижному состоянию якоря, а не замыканию его электрических цепей между собой или на корпус.
2.2.1. Регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Основное преимущество двигателей постоянного тока перед двигателями переменного тока – это относительная легкость регулирования частоты вращения. Известно несколько способов регулирования скорости, которые можно получить из анализа зависимостей (2.4) или (2.5). Регулирование осуществляют: путем изменения сопротивления обмотки якоря, точнее включением последовательно с ней добавочного сопротивления; изменением потока возбуждения или напряжения питания якоря.
Первый способ отличают небольшие затраты на его осуществление, но при эксплуатации, из-за больших потерь мощности на добавочном сопротивлении, его целесообразно применять только для маломощных двигателей и там, где не предъявляется больших требований к стабильности скорости, т.к. этот способ снижает жесткость механической характеристики двигателя.
Н а практике изменение магнитного потока возбуждения возможно только в сторону его уменьшения, т.к. при увеличении потока, требуется повысить ток возбуждения выше номинального, что приведет к перегреву обмотки возбуждения и двигателя в целом. Кроме того, двигатель рассчитан и сконструирован так, что его магнитная система близка к насыщению, поэтому увеличение тока возбуждения не приведет к заметному росту потока возбуждения. Однако, уменьшение потока возбуждения из (2.4) приводит к росту скорости двигателя. На практике же в большинстве случаев требуется ее снижать, что в данном способе невозможно.
а практике изменение магнитного потока возбуждения возможно только в сторону его уменьшения, т.к. при увеличении потока, требуется повысить ток возбуждения выше номинального, что приведет к перегреву обмотки возбуждения и двигателя в целом. Кроме того, двигатель рассчитан и сконструирован так, что его магнитная система близка к насыщению, поэтому увеличение тока возбуждения не приведет к заметному росту потока возбуждения. Однако, уменьшение потока возбуждения из (2.4) приводит к росту скорости двигателя. На практике же в большинстве случаев требуется ее снижать, что в данном способе невозможно.
Поэтому лучшим способом является регулирование скорости путем изменения напряжения питания якоря. В этом способе якорь двигателя подключают к регулируемому источнику постоянного тока, в качестве которого обычно служит управляемый выпрямитель УВ рис. 2.5. Управляемый выпрямитель обычно питается переменным трехфазным напряжением. Величиной выходного постоянного напряжения U управляют, например, путем изменения величины управляющего напряжения UУ, что может осуществлять оператор или система автоматического регулирования. Регулировочные механические характеристики при этом имеют вид, показанный на рис. 2.6. Они имеют вид прямых с одинаковым наклоном к оси абсцисс, т.е. жесткость (наклон) характеристики не меняется с изменением скорости вращения.
Реверс двигателя (изменение направления вращения якоря) осуществляют, меняя полярность источника питания якорной цепи или цепи возбуждения.
- Cистема качества,основанные на принципах ХАССП
- I Общеэкономические принципы.
- I. Психофизиологические принципы
- S: Перечислите принципы осуществления свободы совести.
- SCADA-система. ОРС. Организация взаимодействия с контроллерами.
- А. Файоль и принципы классического менеджмента.
- А.Смиттің салық салу принциптері
- Абсорбционный способ осушки газа. Достоинства и недостатки. Принципиальная схема.
- Автотрансформаторы, особенности конструкции, принцип действия, характеристики
- Аккультурация в межкультурных взаимодействиях
ДПТ состоит из трех основных частей: статора с обмоткой возбуждения, ротора с якорной обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к обмотке якоря (далее ОЯ). При этом щетки неподвижны, а коллектор жестко связан с якорем.
В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря и компенсационные обмотки на полюсах статора.
В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с НВ, ПВ, смешанным возбуждением и параллельным возбуждением.
Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока или на зажимы двигателя, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты.
Необходимым условием процесса преобразования энергии является протекание переменных токов хотя бы по части обмоток машины. В двигателе постоянного тока это условие выполняется работой коллектора, коммутирующего постоянный ток, поступающий от источника питания, с частотой ωэл, равный угловой скорости вращения ротора.
Рис.6.1. Двухфазная модель двигателя постоянного тока c независимым возбуждением
Обмотка статора по оси β включена на постоянное напряжение Uв. Обмотки ротора 2 d и 2q получают питание от преобразователя частоты ПЧ, осуществляющего коммутацию токов i2d и i2q в функции угла поворота φэл с частотой ωэл. Если коммутация осуществляется механическим коммутатором-коллектором, то мы имеем обобщенную электрическую модель двигателя постоянного тока. В случае применения в качестве ПЧ вентильного преобразователя частоты, мы имеем модель вентильного двигателя.
МДС статора неподвижна в пространстве; она создается током возбуждения iв= i1β, а ее направление соответствует направлению оси β. Соответственно и МДС ротора при его вращении со скоростью ω должна быть неподвижна относительно статора, что возможно лишь при условии вращения МДС ротора против его вращения со скоростью ω. Это условие выполняется, если обмотки ротора обтекаются токами, изменяющимися по законам:
МДС ротора в этом случае неподвижна относительно статора, поэтому для математического описания динамических процессов преобразования энергии в двигателе постоянного тока целесообразно использовать формулы прямого преобразования координат обобщенной машины: α, β, d, q -› α, β (ωк=0). Для роторных переменных они имеют вид:
 (6.2)
(6.2)
Подставив u=α, v=β, , получим:
Следовательно, в осях α, β действительным переменным токам обмотки ротора эквивалентна одна якорная обмотка, ось которой совпадает с осью α и которая обтекается постоянным током iя. В реальной машине по оси α расположены также обмотка дополнительных полюсов и компенсационная обмотка. Поэтому модель двигателя постоянного тока в осях α, β будет иметь вид (рис. 6.1б).
Двигатель постоянного тока с параллельным возбуждением – схема работы
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.