Установка винтов на квадрокоптер
Пропеллеры (пилоты коптеров называют их «пропы») вместе с двигателем создают у дрона подъемную силу. Они подбираются по трем критериям — размеру рамы, мощности мотора, чтобы не было перегрева и стилю полета. Для съемок не нужна большая скорость, резкий разгон, а для гонок лопасти должны обеспечивать высокую скорость вращения. Винты — самая уязвимая часть квадрокоптера. Некоторые пилоты сознательно идут на замену этих деталей, чтобы изменить характеристики аппарата. От правильного подбора и установки пропеллеров зависит, как будет летать ваш квадрокоптер, и взлетит ли он.
Правила установки винта на дрон
В комплект квадрокоптера входят детали для сборки, в том числе лопасти и защита. Как их установить? С защитой все предельно просто — найдите паз на луче дрона, вставьте в него рамку детали до упора.
Чтобы правильно установить пропеллеры на квадрокоптер, внимательно следите, какой винт куда ставить. На моторе есть обозначения направления вращения двигателя (буквы, метки). Такая же маркировка стоит и на лопастях. Эти маркировки должны совпадать.
Пример установки пропеллера на коптеры Syma, QS UAV:
- Устанавливаете винт на вал.
- Ставите пластмассовый фиксатор, совмещаете выемки.
- Придерживая лопасти, поворачиваете их до щелчка — с меткой А по часовой стрелке, с меткой Б — против часовой стрелки.
- Сверху ставите защитный колпачок (заглушку).
Чтобы снять пропеллер, снимите заглушку, поверните фиксатор против часовой стрелки и снимите его. Потяните вверх за винт и снимите его с вала.
Существенно облегчают установку быстросъемные адаптеры для пропеллеров. Переходник состоит из двух частей — одна крепится на мотор, другая — на винт. Пропеллер легко накручивается на двигатель правого или левого вращения и так же снимается. Такой вариант удобен для частой перевозки квадрокоптеров, например, на соревнования.

Винты, которые вы покупаете отдельно, идут в наборе по 2, 4, 6 штук. Есть лопасти с интегрированной гайкой прямого и обратного вращения для быстрой установки и съема, предотвращающей их откручивание в полете.
Если двигатель — просто штырь, без дополнительных элементов для сборки, вам понадобятся втулки-переходники, которые ставят на вал и затягивают болтами. Сверху поставьте пропеллер, закрепите его нейлоновыми стяжками или резиновым кольцом.
Еще один вариант крепления — цанговый зажим. Цангу поставьте на вал, затем — зажимную втулку с пропеллером и шайбой, зафиксируйте конструкцию коком (гайкой особой формы).
Принцип работы винтов
- длина винта — диаметр диска, образующегося при вращении пропеллера. Чем она больше, тем больше подъемная сила дрона, тем мощнее нужен мощнее мотор;
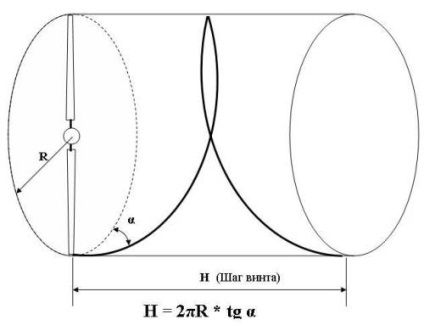
- шаг — расстояние, пройденное винтом за один оборот (зависит от угла наклона лопастей), указывает на объем воздуха, попадающего под пропеллер за один оборот.
Размеры винтов, допустимые для установки, указаны в инструкции к двигателю (например 1045" — диаметр 10 дюймов, 4,5 дюйма — шаг).
Лопасти расположены под определенным углом наклона, который влияет на сопротивляемость воздуху. Пропеллер с большим углом наклона поднимает копетр вверх за один оборот, но при этом сильно нагружает мотор. Для разгона и маневренности нужен менее энергозатратный угол наклона.
Уменьшая длину винта и увеличивая шаг, снижаем сопротивление воздуха и повышаем скорость подъема беспилотника. Если сделать наоборот, динамические характеристики дрона снижаются, но зато повышается его грузоподъемность, стабильность полета.
Пропы делают 2-5-ти лопастными. Чем их больше, тем стабильнее дрон держится в воздухе. Главный недостаток многолопастных пропеллеров — сложность балансировки.

По форме лопасти бывают:
- Normal (N) — с заостренными концами. Уменьшают силу тяги, снижают расход энергии батареи;
- Bullnose (BN) — закругленные края. Обладают большей площадью, создают больше тяги. За счет дополнительного веса на кончиках обеспечивают стабильность аппарату, увеличивают отзывчивость по рысканию — вращению вокруг вертикальной оси квадрокоптера. Минус — высокое энергопотребление, небольшая продолжительность полета;
- Hybrid Bullnose (HBN) — среднее между BN и N.
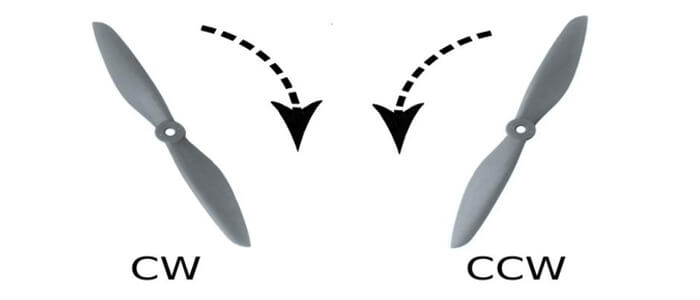
Винты вращают электродвигатели, половина которых крутится по часовой стрелке (CW), а другая половина — против нее (CCW). Определить направление вращения можно по поднятой кромке лопасти, которая смотрит в сторону вращения.
Вращаясь, пропеллер разгоняет воздух вокруг себя, толкает его вниз, где создается более высокое давление, чем окружающая атмосфера. Разница давлений поднимает квадрокоптер вверх.
Пластиковые пропеллеры — самые распространенные и недорогие. Гибкие винты устойчивы к повреждениям, но часто возникают проблемы с их точной балансировкой, что вызывает нарушение в работе гироскопов и отражается на качестве отснятых камерой кадров. Углеродное волокно (карбон) считается лучшим материалом для пропов. Карбоновые винты стоят не дешево, но это оправдано — прочные, жесткие лопасти не утяжеляют вес коптера, не теряют свою форму, их легко сбалансировать. Пластик, усиленный карбоновым волокном, по прочности сравним с карбоном, а по цене — с обычным пластиком.
Балансировка пропеллера
Высококлассные винты не нужно дополнительно балансировать, они не вызывают вибраций дрона. Бюджетные лопасти, не редко плохо сбалансированы и создают вибрации при полете. Это отрицательно сказывается на качестве снимков, видео (на них появляется рябь, эффект желе), приводит к быстрому износу аппарата.
Вибрацию устраняют с помощью небольшого прибора — балансира.

На ось надевают пропеллер, фиксируют его зажимами и ставят на небольшой станочек. Сбалансированный винт замрет в горизонтальном положении. Если одна его часть опустится вниз, значит, лопасти разбалансированы. Чтобы привести их в надлежащее состояние, можно на более легкую сторону (которая вверху) наклеить кусочки изоленты, смазать клеем или тяжелую часть подточить наждачкой.
Если под рукой нет балансира, можно использовать подручные средства — стержень от шариковой ручки, два стакана или чашки. Вставляем стержень в отверстие винта. Если он болтается, накрутим на него скотч, чтобы пропеллер плотно держался. Поставим емкости на ровную поверхность на небольшом расстоянии друг от друга, на них укладываем импровизированную ось с винтом. Смотрим, есть ли отклонения, и корректируем их.
Правильная балансировка лопастей продлит срок службы квадрокоптера!
Сегодня в данной статье Вы узнаете фундаментальные знания о вращательных винтах для квадрокоптера (которые к тому же называют реквизитами). Какие показатели влияют на их производительность и эффективность. Какие формы и сколько лопастей должны быть у пропеллера, чтобы не занижаться тягу.
Что нужно знать: основные определения и понятия
Пропеллеры для квадрокоптеров подразделяются по следующим критериям:
- какая у них длина;
- какой у них шаг;
- какая площадь пропеллеров;
- какое направление вращения;
- какая у них форма;
- и сколько лопастей на каждом пропеллере;
Длина пропеллера и его шаг
Длина и шаг являются главными параметрами определяющие тягу. Во время вращения винта, лопасти образуют диск. Диаметр этого диска и есть длина. Под шагом понимают расстояние, которое винт может преодолеть за одно вращение, в некой плотной среде (если вспомнить шуруп, и то как он вкручивается в доску, то все становится понятно). Величина шага у лопастей квадрокоптера, зависит от наклона самих лопастей, то под каким углом они расположены (угол атаки).
Тяга считается сильной, когда винтомоторная группа (ВМГ) винтами перемещает большой объём воздуха. При увеличении длины, шага или какого-то одного из этих параметров, где скорость вращения остается неизменной, тяга винтов увеличивается. Вместе с этим образуется турбулентность за счет увеличения сопротивления воздуха. И как следствие, большой радиус пропеллера и угол наклона лопастей, потребует больших затрат энергии, за счет чего будет уменьшено время полёта.
Для аэрофотосъёмки идеально подойдут большие пропеллеры с малым шагом, а небольшие винты с большим шагом подойдут для гоночных дронов, которым важна скорость полёта.
Количество и форма лопастей пропеллеров

Стандартным вариантом принято считать пропеллер с двумя лопастями. На большинство маленьких квадрокоптерах ставятся винты с лопастями больше двух. Это позволяет обеспечить более равномерный поток распределения воздуха, и как следствие снизить уровень турбулентности. К тому же, за счет дополнительных лопастей увеличивается и подъемная сила. Таким образом, маленький диаметр винта с тремя (или более) лопастями, способен обеспечить силу подъёма, что и стандартный пропеллер с двумя лопастями и большим диаметром. Отзывчивость квадрокоптера, также зависит от количества лопастей у пропеллера, и чем больше их, тем отзывчивее дрон в полёте. Стоимость таких многолопастных винтов дороже стандартных, и есть сложности в изготовлении и отцентровки данных винтов. Такие винты следует покупать у производителей или официальных дилеров.
Присмотритесь на различия форм окончаний лопастей. Их подразделяют на три категории:
Винты Normal позволяют сэкономить расход аккумулятора за счет меньшей тяги, и благоприятно влияют на продолжительность полёта не вызывая дополнительного перерасхода энергии. На винтах Normal имеются заостренные наконечники. Равный диаметр винтов BN при их большой площади создает большую тягу. Такое преимущество сопровождается недостатком – уменьшение времени полёта из-за высокого потребления энергии. Имеющиеся утяжелители на кончиках реквизитов, способствуют увеличению крутящего момента и повышают скорость реакции квадрокоптера по оси рысканья. Что касается наконечников HBN, то они находятся между Normal и Bullnose.
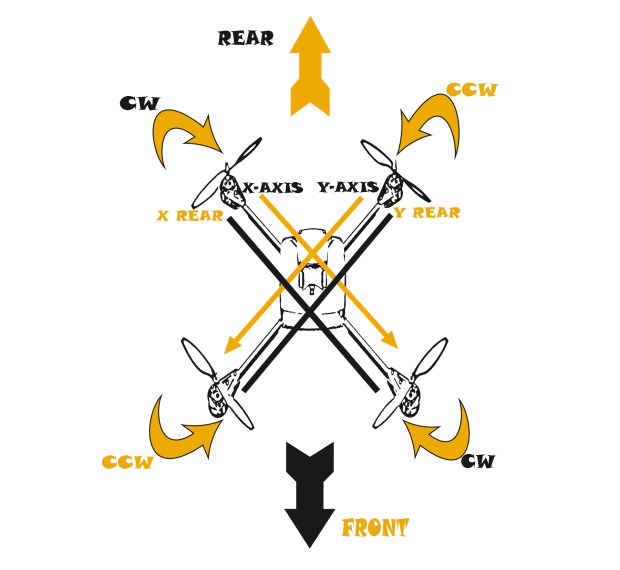
Направление вращения
За направление вращение лопастей отвечают двигатели, которые разделяют на два типа:
- CW – крутит пропеллер по часовой стрелке;
- CCW – крутит пропеллер против часовой стрелки;
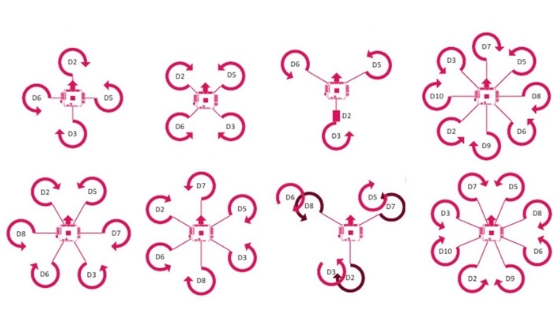
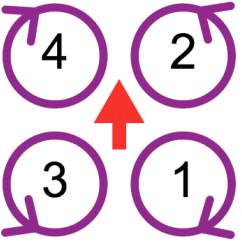
Принцип установки таких моторов зависит от схемы устройства квадрокоптера. Более наглядно схемы изображены на рисунке.
По кромке лопасти можно определить то, в какую сторону он вращается.
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.

Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов – это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB – где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.
Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами – R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) – на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы – это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.

Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком – гайкой, особой формы.

На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео. Помимо качества записи видео, также страдают и двигатели. Постоянные вибрации оказывают негативное влияние на двигатели, подшипники и шерстни, тем самым увеличивая стоимость обслуживания квадрокоптера.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.

Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой). На более легкую лопасть можно наклеить скотчи или нанести на нее лак для ногтей, если таковой имеется под рукой. В случае если нет ни того ни другого, используйте суперклей.
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Калькулятор eCalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
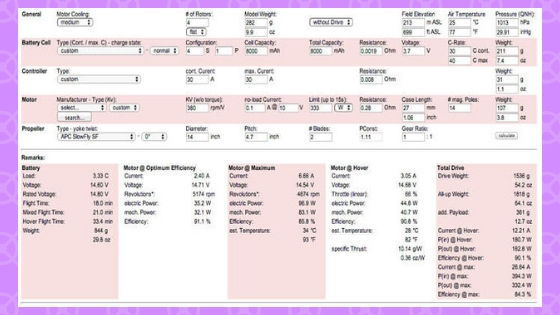
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе +10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
RashVinta
RashVinta – программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
С помощью RashVinta можно делать вычисления с исходными данными, такие как:
Мощность двигателя и диаметр винта;
Мощность двигателя и частота вращения винта;
Диаметр Винта и его шаг.
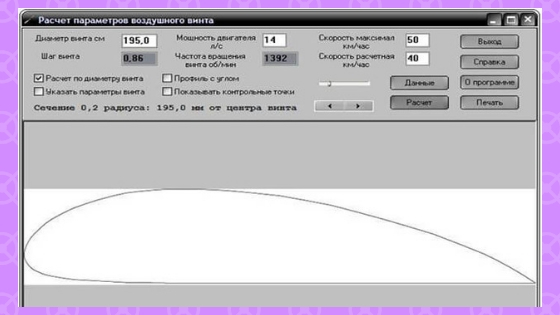
В первом случае устанавливаем флажок только на параметре “расчет по диаметру винта”. Указываем информацию о размере пропеллера, мощность двигателя, скорость полета – максимальная и средняя. Жмем “Рассчитать” и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем “Рассчитать” и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт “указать параметры винта”. Параметры диаметра и шага винта вносим в нужные поля. Жмем “Рассчитать” и видим данные по профилю лопасти винта, его изображение появляется в окне. Можно менять масштаб для его изучения. Все заключения по расчетам сохраняются в виде таблиц в формате date.html, предусмотренном в сборке программы.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт “Профиль с углом”. И еще можно увидеть точки, который были использованы для расчета – отметьте галочкой пункт “показать расчетные точки”. На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Заключение о сложности процедуры
Как вы уже заметили, работы по подбору и корректировке реквизитов, довольно сложная задача для новичка. Но я надеюсь, что эта статья будет полезна для любителей квадрокоптеров и другой беспилотной авиации, грамотно провести процедуру балансировки пропеллеров, их установки на квадрокоптер с самодельной конструкцией. А также избавиться от ошибок в работе ВМГ серийных моделей мультикоптеров.
Я иногда спешу скорее полетать после сборки нового квадрокоптера. К сожалению, некоторые дроны не взлетали из-за ошибок в конфигурации и настройках. Несколько раз первое включение даже сопровождалось дымком из-за короткого замыкания.
Чтобы больше не наступать на грабли, я составил 15 пунктов-правил того, что нужно сделать первым делом после сборки нового квадрокоптера. Надеюсь, что эти правила помогут вам не спалить свой новый дрон при первом запуске, а также, чтобы первый полет прошел гладко и без проблем.

№1 СНИМАЙТЕ ПРОПЕЛЛЕРЫ при любых работах с квадрокоптером
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
№2 ПРОВЕРЬТЕ ДЛИНУ ВИНТОВ, которыми крепятся двигатели к раме
Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
№3 ИСПОЛЬЗУЙТЕ Smoke Stopper
Это приспособление очень недооценивают, а ведь оно может спасти ваш дрон от дыма, который выйдет из него после короткого замыкания. Смок Стоппер нужен для первого запуска дрона, благодаря ему электричество направится на лампочку, не спалив сам дрон. Будет обидно увидеть белый дымок из дрона, на который вы потратили тысячи рублей (или пару десятков), а он сгорит при первом же запуске.

Подробнее о том, как это работает и для чего, можете почитать здесь (англ. язык): https://oscarliang.com/smoke-stopper/
№4 ПРОВЕРЬТЕ НАПРАВЛЕНИЕ квадрокоптера
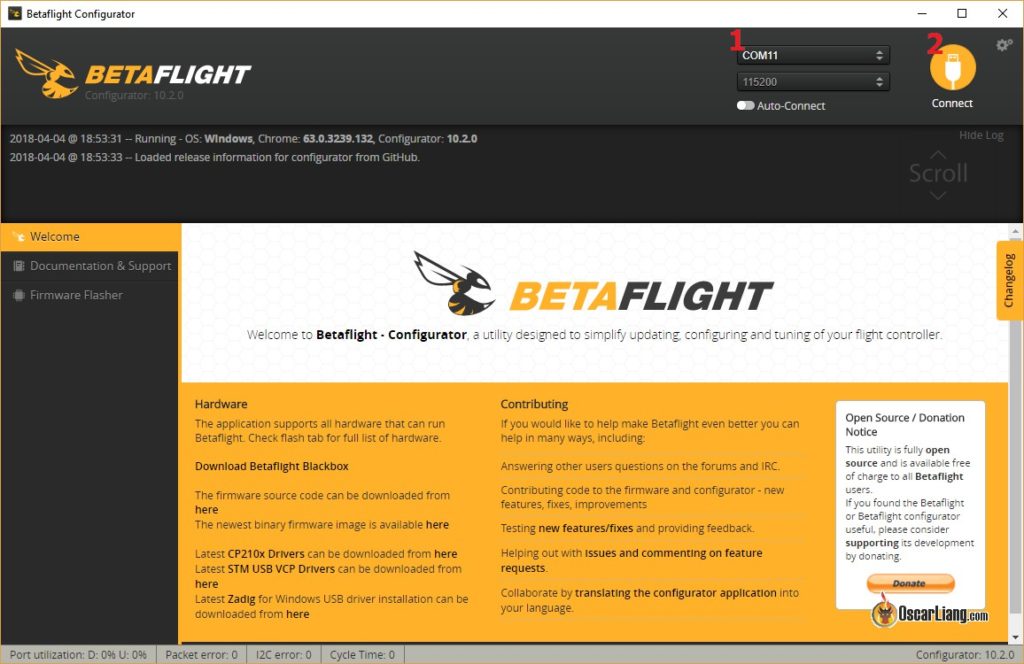
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.
Совет. Если моделька не реагирует на ваши движения, проверьте, включен для акселерометр во вкладке Configuration.
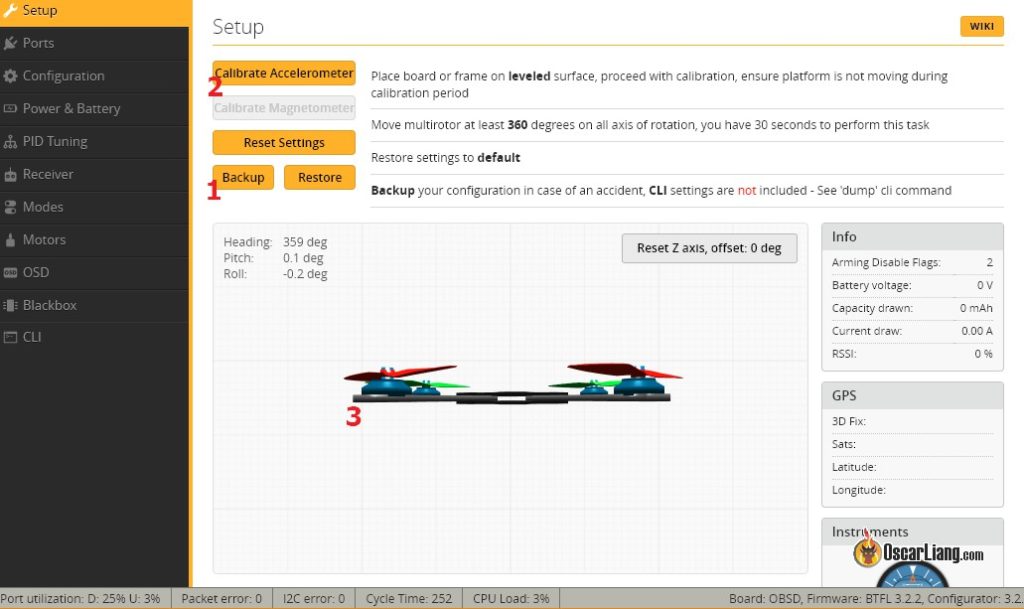
Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
№5 ПРОВЕРЬТЕ МОТОРЫ
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Если мотор крутится не в ту сторону, можно исправить 3 способами:
- поменять местами провода
- переназначить порт (resource remapping)
- или сделать реверс в BLheli — это самый простой и удобный способ.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
№6 ПРОВЕРЬТЕ ПРИЕМНИК
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
Далее убедитесь, что среднее положение полосок на отметке 1500, а минимальные и максимальные 1000 и 2000 соответственно. Поправить значения можно кнопками на пульте:

или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
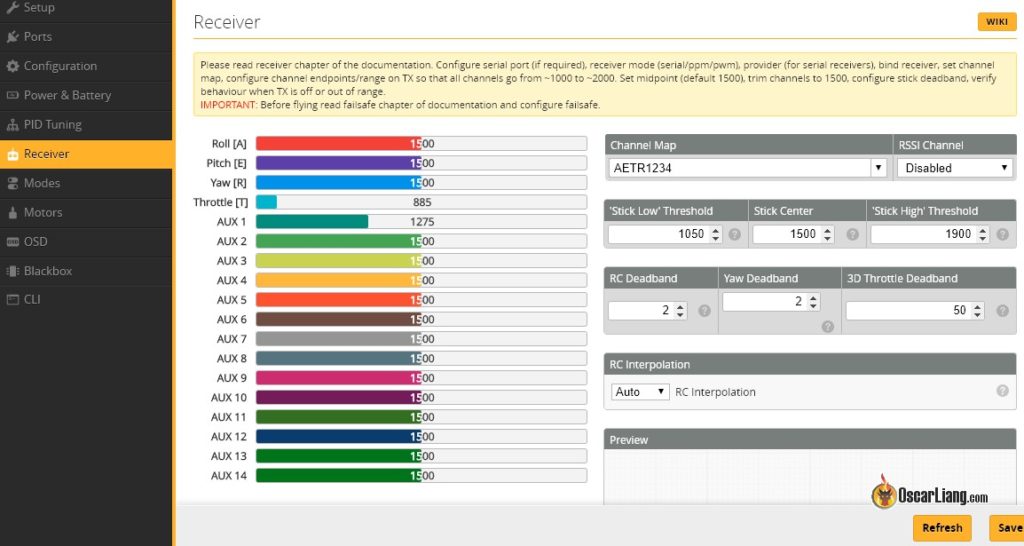
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
№7 Арминг, газ и проблемы с запуском
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.
№8 НАСТРОЙТЕ Failsafe
Failsafe — это одна из главных вещей, которую должен знать каждый новичок в первую очередь. Если вы не настроите Failsafe, то при потере сигнала ваш дрон просто улетит и будет лететь, пока не разрядится аккумулятор. О последствиях, думаю, можно и не говорить, это, как минимум, потеря денег, максимум — он упадет кому-нибудь на голову.
Как настроить Failsafe, можно прочитать здесь.
№9 ОТКАЛИБРУЙТЕ регуляторы оборотов (ESC)
Регуляторы не нужно калибровать, если используется протокол DShot, включая DShot150, DShot300, DShot600, DShot1200 и DShot2400. Но нужно будет калибровать, если у вас PWM, Oneshot125, Oneshot42 и Multishot.
Как откалибровать регуляторы оборотов, читайте здесь.
№10 Настройка Betaflight
Настройка betaflight — это главная часть перед первыми полетами, но там столько настроек, что у новичка может пойти голова кругом.
Но у нас есть специальное руководство для новичков, где собраны все настройки Betaflight на русском языке.
№11 ПРОВЕРКА FPV системы
Перед первым полетом убедитесь, что FPV система корректно работает: камера fpv снимает и направляет видео в видеопередатчик, а он в свою очередь отправляет сигнал в ваш шлем или очки. Проверьте, совпадают ли каналы на видеопередатчике и шлеме/очках, качественная ли картинка.
Если у вас есть OSD, то его можно настроить под свои нужды, статья как настроить OSD Betaflight.
№12 НЕ ВКЛЮЧАЙТЕ видеопередатчик без антенны
VTX (видеопередатчик) всегда достаточно сильно греется и это нормально, но он может перегреться и сгореть, если вы его включите без антенны. Точнее не может, а точно сгорит без антенны. Не забывайте сначала устанавливать антенну, затем включать сам квадрокоптер.

№13 ПРОВЕРЬТЕ, правильно ли вы установили пропеллеры на моторы
У квадрокоптера 4 мотора, 2 (CW) вращается по часовой стрелке и 2 против часовой стрелки (CCW). Не перепутайте пропеллеры при установке, на них тоже есть маркировка, также обычно маркировку направления вращения наносят и на сами двигатели. Если установить пропеллеры в неправильном направлении, при попытке взлета квадрокоптер перевернется. Правильная установка:

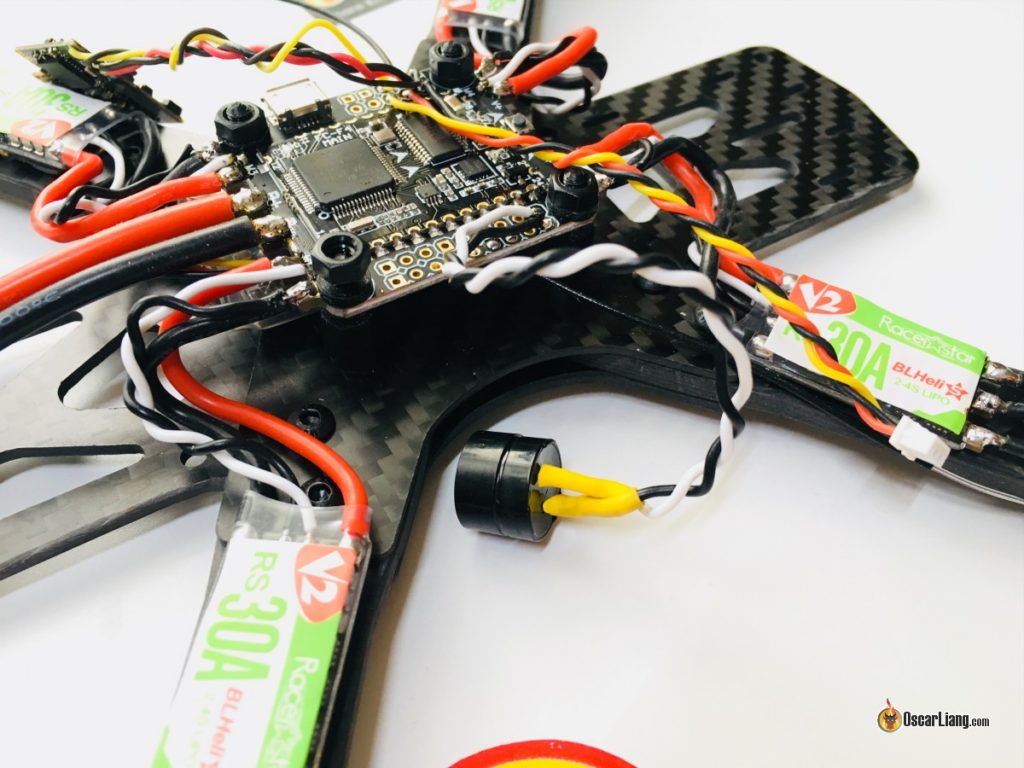
№14 УСТАНОВИТЕ пищалку (buzzer)
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
№15 ТРЕНИРУЙТЕСЬ в симуляторах
Перед своим первым полетом вам просто необходимо сначала потренироваться в симуляторе, это позволит получить вам первые и необходимые навыки полета и, скорее всего, вы не разобьете дрон в первые секунды. Достаточно полетать в симуляторе часа 4 и уже можно будет пробовать летать на реальном квадрокоптере. Симуляторов очень много, большинство платные, но уже есть и бесплатные.
Винты для квадрокоптера — полный обзор технических характеристик, методы устранения неисправности
Винты для квадрокоптера – это детали, от которых во многом зависит работа техники. Их размер, форма, материал и другие характеристики определяют особенности движения технического устройства. Одни винты устанавливают, если необходим плавный полет для съемки видео, другие – если требуется быстрое перемещение для соревнований. Дополнительная функция пропеллеров – защита квадрокоптера от перегрева мотора.

Что нужно знать при выборе винтов для квадрокоптера: основные определения и понятия
В первую очередь необходимо обращать внимание на:
- параметры длины;
- размер шага;
- площадь винтов;
- направленность работы;
- форму деталей;
- количество лопастей.
Нужно разбираться и в терминологии, которая используется для указания тех или иных характеристик летающего аппарата:
- «В идеальном мире». Понятие предполагает эксплуатацию квадрокоптера в максимально благоприятных условиях (без ветра, осадков и т.д.).
- «Длина». Характеризует диаметр окружности, описываемой движущимися лопастями.
- «Шаг». По своему определению максимально приближается к термину «шаг резьбы» шурупа или других подобных деталей. Описывает расстояние, которое «пролетает» винт за один оборот.
- «Угол атаки». Определяется углом наклона. От этого показателя зависит скорость, длина шага, плавность движения.
- «Тяга». Расчет тяги производится, чтобы узнать силу, которая образуется работой пропеллера. При этом учитываются показатели воздушного сопротивления и гравитации.

Длина пропеллера и его шаг
Сила тяги зависит от диаметра, образуемого лопастями диска, и шага движения. Если сила тяги квадрокоптера высокая, системы пропеллеров перемещают крупные объемы воздушной смеси. Если увеличить шаг или длину и оставить прежней скорость вращения винта, тяга существенно вырастет. Повысится сопротивление воздушной смеси, и появится турбулентность. В результате слишком высокие показатели длины и шага приведут к увеличенным затратам энергии, снизится длительность полета на одном заряде.

Определиться с выбором по данной характеристике лучше всего, исходя из целей использования квадрокоптера:
- Для фото и видеосъемки. Рекомендуется установить винты с большой длиной и коротким шагом.
- Для гоночных соревнований. Менее плавное, но быстрое движение требует кардинально противоположной расстановки: малая длина и большой шаг.
Количество и форма лопастей пропеллеров
Обычно на квадрокоптеры стандартного размера устанавливают пропеллеры с двумя лопастями. Для миниатюрной техники уже нужны узлы с большим количеством лопастей, что позволит контролировать силу потоков воздуха и придерживаться плавности полета.

Чем больше винтов установлено, тем выше показатель отзывчивости. Но есть и минусы: такие аппараты стоят дороже и сложны в процессе отцентровки. Выбирая квадрокоптер, следует обращаться лишь в официальные магазины, чтобы получить оригинальную модель.
По форме все пропеллеры разделяют на три категории:
- Normal. Их особенность – небольшая тяга и заостренные наконечники. Благодаря этому они эксплуатируются в экономичном режиме, и время работы увеличено.
- Bullnose. Напротив, вариант с высокой тягой, скоростью полета и повышенными затратами энергии. Отличаются утяжеленной конструкцией наконечников.
- Hybrid Bullnose. Нечто среднее между двумя предыдущими вариантами и по характеристикам и по конструкции.
Направление вращения винтов квадрокоптера.
Еще одна важная характеристика, которая зависит от установленного двигателя:
- CW. Стандартная система с работой по часовой стрелке.
- CCW. Вращение лопастей квадрокоптера против стрелки часов.

Определить, для какого типа подойдет винт, можно по поднятой кромке на нем. Эта часть детали направляется в сторону вращения.
Пластик и карбон: где качество и эффективность
Выбор лопастей для квадрокоптера по материалу не так прост. Перед владельцем дрона встает вопрос: сэкономить и обойтись базовым вариантом или купить винты хорошего качества? Разобраться поможет изучение положительных и отрицательных сторон материалов.
легкость в балансировке
красивый дизайн благодаря углеродному покрытию
Спецификация и характеристики
Для удобной работы с винтами при их подборе и установке желательно знать кодировку. Узлы обозначены данными LLPP×B. Еще есть другой вариант – L×P×B.
- L – показатель длины;
- P – шаг вращения винта;
- B – сколько установлено лопастей.
Кроме этого, могут встречаться обозначения R или C. Они указывают на направление вращения лопастей. R – на движение по часовой стрелке, а C – против.
Методы установки винта на квадрокоптер

Менять винт на дроне можно несколькими способами. Проблема в том, что обычно валом мотора является простой штырь и для установки пропеллеров потребуется что-то из нижеперечисленного:
-
Пропсейвер. Базовый вариант с максимально простой конструкцией. Его советуют ставить лишь при экспериментах с самодельными квадрокоптерами. Способ фиксации: установка пропсейвера на вал и фиксация винтов.

У некоторых квадрокоптеров с электродвигателями типа Outrunner могут быть отверстия для различных креплений.
Балансировка пропеллеров с помощью подручных средств
Производитель вряд ли рассчитает с особой точностью баланс пропеллеров. А отклонения от нормальных показателей приводят к повышению шумности, снижению качества съемки и быстрому износу электродвигателя.
Чтобы выполнить балансировку, нужны:
- лак для ногтей или клей «Момент»;
- наждачная бумага;
- станок для балансировки винтов.
Вначале необходимо закрепить лопасть на оси станка и немного отклонить ее в одну из сторон. Если лопасть остается на месте, а не возвращается назад, нужно выровнять вес лезвий. Более тяжелую сторону можно обработать наждачкой или же более легкую сторону покрыть тонкими слоями лака или клея.

Шлифовка или покрытие клеевым составом выполняется только на внутренних частях винта.
Кроме того, необходима балансировка ступицы. Для этого винт закрепляется в вертикальном положении и также осматривается на предмет отклонений. Регулировать балансировку, как и в горизонтальном положении, можно с помощью нескольких слоев клея «Момент» или аналогичных средств.
Не работает винт на квадрокоптере
Ситуация, когда не работает один винт, достаточно распространенная. Возможные причины:
- Пропеллер неправильно закреплен.
- Дефект пайки проводов к двигателю.
- Повреждения системной платы.
- Поломка шестеренок.
- Нарушения работы контроллера.
Для начала необходимо осмотреть крепления. Если они отвечают инструкции, то, скорее всего, причина более серьезная, и квадрокоптер лучше отнести в ремонт, выбрав услуги профессионала, а не самостоятельный способ решения проблемы.
В специализированных магазинах продаются разные варианты винтов для квадрокоптера, которые могут отличаться между собой по размеру, типу конструкции, используемым материалам и даже стороне вращения. Делая окончательный выбор, необходимо учитывать условия эксплуатации дрона.
Как ставить лопасти на квадрокоптер
Пропеллеры (пилоты коптеров называют их «пропы») вместе с двигателем создают у дрона подъемную силу. Они подбираются по трем критериям — размеру рамы, мощности мотора, чтобы не было перегрева и стилю полета. Для съемок не нужна большая скорость, резкий разгон, а для гонок лопасти должны обеспечивать высокую скорость вращения. Винты — самая уязвимая часть квадрокоптера. Некоторые пилоты сознательно идут на замену этих деталей, чтобы изменить характеристики аппарата. От правильного подбора и установки пропеллеров зависит, как будет летать ваш квадрокоптер, и взлетит ли он.
Правила установки винта на дрон
В комплект квадрокоптера входят детали для сборки, в том числе лопасти и защита. Как их установить? С защитой все предельно просто — найдите паз на луче дрона, вставьте в него рамку детали до упора.
Чтобы правильно установить пропеллеры на квадрокоптер, внимательно следите, какой винт куда ставить. На моторе есть обозначения направления вращения двигателя (буквы, метки). Такая же маркировка стоит и на лопастях. Эти маркировки должны совпадать.
Пример установки пропеллера на коптеры Syma, QS UAV:
- Устанавливаете винт на вал.
- Ставите пластмассовый фиксатор, совмещаете выемки.
- Придерживая лопасти, поворачиваете их до щелчка — с меткой А по часовой стрелке, с меткой Б — против часовой стрелки.
- Сверху ставите защитный колпачок (заглушку).
Чтобы снять пропеллер, снимите заглушку, поверните фиксатор против часовой стрелки и снимите его. Потяните вверх за винт и снимите его с вала.
Существенно облегчают установку быстросъемные адаптеры для пропеллеров. Переходник состоит из двух частей — одна крепится на мотор, другая — на винт. Пропеллер легко накручивается на двигатель правого или левого вращения и так же снимается. Такой вариант удобен для частой перевозки квадрокоптеров, например, на соревнования.
Винты, которые вы покупаете отдельно, идут в наборе по 2, 4, 6 штук. Есть лопасти с интегрированной гайкой прямого и обратного вращения для быстрой установки и съема, предотвращающей их откручивание в полете.
Если двигатель — просто штырь, без дополнительных элементов для сборки, вам понадобятся втулки-переходники, которые ставят на вал и затягивают болтами. Сверху поставьте пропеллер, закрепите его нейлоновыми стяжками или резиновым кольцом.
Еще один вариант крепления — цанговый зажим. Цангу поставьте на вал, затем — зажимную втулку с пропеллером и шайбой, зафиксируйте конструкцию коком (гайкой особой формы).
Принцип работы винтов
- длина винта — диаметр диска, образующегося при вращении пропеллера. Чем она больше, тем больше подъемная сила дрона, тем мощнее нужен мощнее мотор;
- шаг — расстояние, пройденное винтом за один оборот (зависит от угла наклона лопастей), указывает на объем воздуха, попадающего под пропеллер за один оборот.
Размеры винтов, допустимые для установки, указаны в инструкции к двигателю (например 1045″ — диаметр 10 дюймов, 4,5 дюйма — шаг).
Лопасти расположены под определенным углом наклона, который влияет на сопротивляемость воздуху. Пропеллер с большим углом наклона поднимает копетр вверх за один оборот, но при этом сильно нагружает мотор. Для разгона и маневренности нужен менее энергозатратный угол наклона.
Уменьшая длину винта и увеличивая шаг, снижаем сопротивление воздуха и повышаем скорость подъема беспилотника. Если сделать наоборот, динамические характеристики дрона снижаются, но зато повышается его грузоподъемность, стабильность полета.
Пропы делают 2-5-ти лопастными. Чем их больше, тем стабильнее дрон держится в воздухе. Главный недостаток многолопастных пропеллеров — сложность балансировки.
По форме лопасти бывают:
- Normal (N) — с заостренными концами. Уменьшают силу тяги, снижают расход энергии батареи;
- Bullnose (BN) — закругленные края. Обладают большей площадью, создают больше тяги. За счет дополнительного веса на кончиках обеспечивают стабильность аппарату, увеличивают отзывчивость по рысканию — вращению вокруг вертикальной оси квадрокоптера. Минус — высокое энергопотребление, небольшая продолжительность полета;
- Hybrid Bullnose (HBN) — среднее между BN и N.
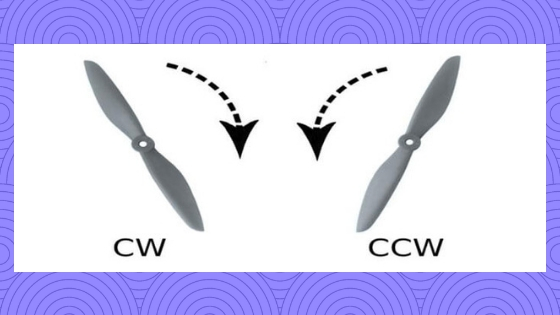
Винты вращают электродвигатели, половина которых крутится по часовой стрелке (CW), а другая половина — против нее (CCW). Определить направление вращения можно по поднятой кромке лопасти, которая смотрит в сторону вращения.
Вращаясь, пропеллер разгоняет воздух вокруг себя, толкает его вниз, где создается более высокое давление, чем окружающая атмосфера. Разница давлений поднимает квадрокоптер вверх.
Пластиковые пропеллеры — самые распространенные и недорогие. Гибкие винты устойчивы к повреждениям, но часто возникают проблемы с их точной балансировкой, что вызывает нарушение в работе гироскопов и отражается на качестве отснятых камерой кадров. Углеродное волокно (карбон) считается лучшим материалом для пропов. Карбоновые винты стоят не дешево, но это оправдано — прочные, жесткие лопасти не утяжеляют вес коптера, не теряют свою форму, их легко сбалансировать. Пластик, усиленный карбоновым волокном, по прочности сравним с карбоном, а по цене — с обычным пластиком.
Балансировка пропеллера
Высококлассные винты не нужно дополнительно балансировать, они не вызывают вибраций дрона. Бюджетные лопасти, не редко плохо сбалансированы и создают вибрации при полете. Это отрицательно сказывается на качестве снимков, видео (на них появляется рябь, эффект желе), приводит к быстрому износу аппарата.
Вибрацию устраняют с помощью небольшого прибора — балансира.
На ось надевают пропеллер, фиксируют его зажимами и ставят на небольшой станочек. Сбалансированный винт замрет в горизонтальном положении. Если одна его часть опустится вниз, значит, лопасти разбалансированы. Чтобы привести их в надлежащее состояние, можно на более легкую сторону (которая вверху) наклеить кусочки изоленты, смазать клеем или тяжелую часть подточить наждачкой.
Если под рукой нет балансира, можно использовать подручные средства — стержень от шариковой ручки, два стакана или чашки. Вставляем стержень в отверстие винта. Если он болтается, накрутим на него скотч, чтобы пропеллер плотно держался. Поставим емкости на ровную поверхность на небольшом расстоянии друг от друга, на них укладываем импровизированную ось с винтом. Смотрим, есть ли отклонения, и корректируем их.
Винты для квадрокоптера: всё что нужно знать
Сегодня в данной статье Вы узнаете фундаментальные знания о вращательных винтах для квадрокоптера (которые к тому же называют реквизитами). Какие показатели влияют на их производительность и эффективность. Какие формы и сколько лопастей должны быть у пропеллера, чтобы не занижаться тягу.
Что нужно знать: основные определения и понятия
Пропеллеры для квадрокоптеров подразделяются по следующим критериям:
- какая у них длина;
- какой у них шаг;
- какая площадь пропеллеров;
- какое направление вращения;
- какая у них форма;
- и сколько лопастей на каждом пропеллере;
Длина пропеллера и его шаг
Длина и шаг являются главными параметрами определяющие тягу. Во время вращения винта, лопасти образуют диск. Диаметр этого диска и есть длина. Под шагом понимают расстояние, которое винт может преодолеть за одно вращение, в некой плотной среде (если вспомнить шуруп, и то как он вкручивается в доску, то все становится понятно). Величина шага у лопастей квадрокоптера, зависит от наклона самих лопастей, то под каким углом они расположены (угол атаки).
Тяга считается сильной, когда винтомоторная группа (ВМГ) винтами перемещает большой объём воздуха. При увеличении длины, шага или какого-то одного из этих параметров, где скорость вращения остается неизменной, тяга винтов увеличивается. Вместе с этим образуется турбулентность за счет увеличения сопротивления воздуха. И как следствие, большой радиус пропеллера и угол наклона лопастей, потребует больших затрат энергии, за счет чего будет уменьшено время полёта.
Для аэрофотосъёмки идеально подойдут большие пропеллеры с малым шагом, а небольшие винты с большим шагом подойдут для гоночных дронов, которым важна скорость полёта.
Количество и форма лопастей пропеллеров
Стандартным вариантом принято считать пропеллер с двумя лопастями. На большинство маленьких квадрокоптерах ставятся винты с лопастями больше двух. Это позволяет обеспечить более равномерный поток распределения воздуха, и как следствие снизить уровень турбулентности. К тому же, за счет дополнительных лопастей увеличивается и подъемная сила. Таким образом, маленький диаметр винта с тремя (или более) лопастями, способен обеспечить силу подъёма, что и стандартный пропеллер с двумя лопастями и большим диаметром. Отзывчивость квадрокоптера, также зависит от количества лопастей у пропеллера, и чем больше их, тем отзывчивее дрон в полёте. Стоимость таких многолопастных винтов дороже стандартных, и есть сложности в изготовлении и отцентровки данных винтов. Такие винты следует покупать у производителей или официальных дилеров.
Присмотритесь на различия форм окончаний лопастей. Их подразделяют на три категории:
- Normal;
- Bullnose (BN);
- Hybrid Bullnose (HBN);
Винты Normal позволяют сэкономить расход аккумулятора за счет меньшей тяги, и благоприятно влияют на продолжительность полёта не вызывая дополнительного перерасхода энергии. На винтах Normal имеются заостренные наконечники. Равный диаметр винтов BN при их большой площади создает большую тягу. Такое преимущество сопровождается недостатком – уменьшение времени полёта из-за высокого потребления энергии. Имеющиеся утяжелители на кончиках реквизитов, способствуют увеличению крутящего момента и повышают скорость реакции квадрокоптера по оси рысканья. Что касается наконечников HBN, то они находятся между Normal и Bullnose.
Направление вращения
За направление вращение лопастей отвечают двигатели, которые разделяют на два типа:
- CW – крутит пропеллер по часовой стрелке;
- CCW – крутит пропеллер против часовой стрелки;
Принцип установки таких моторов зависит от схемы устройства квадрокоптера. Более наглядно схемы изображены на рисунке.
По кромке лопасти можно определить то, в какую сторону он вращается.
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
- прочность;
- эффективность;
- лёгкость;
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.
Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов – это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB – где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.
Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами – R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) – на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы – это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.
Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком – гайкой, особой формы.
На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео. Помимо качества записи видео, также страдают и двигатели. Постоянные вибрации оказывают негативное влияние на двигатели, подшипники и шерстни, тем самым увеличивая стоимость обслуживания квадрокоптера.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой). На более легкую лопасть можно наклеить скотчи или нанести на нее лак для ногтей, если таковой имеется под рукой. В случае если нет ни того ни другого, используйте суперклей.
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Калькулятор eCalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе +10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
RashVinta
RashVinta – программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
С помощью RashVinta можно делать вычисления с исходными данными, такие как:
Мощность двигателя и диаметр винта;
Мощность двигателя и частота вращения винта;
Диаметр Винта и его шаг.
В первом случае устанавливаем флажок только на параметре “расчет по диаметру винта”. Указываем информацию о размере пропеллера, мощность двигателя, скорость полета – максимальная и средняя. Жмем “Рассчитать” и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем “Рассчитать” и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт “указать параметры винта”. Параметры диаметра и шага винта вносим в нужные поля. Жмем “Рассчитать” и видим данные по профилю лопасти винта, его изображение появляется в окне. Можно менять масштаб для его изучения. Все заключения по расчетам сохраняются в виде таблиц в формате date.html, предусмотренном в сборке программы.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт “Профиль с углом”. И еще можно увидеть точки, который были использованы для расчета – отметьте галочкой пункт “показать расчетные точки”. На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Заключение о сложности процедуры
Как вы уже заметили, работы по подбору и корректировке реквизитов, довольно сложная задача для новичка. Но я надеюсь, что эта статья будет полезна для любителей квадрокоптеров и другой беспилотной авиации, грамотно провести процедуру балансировки пропеллеров, их установки на квадрокоптер с самодельной конструкцией. А также избавиться от ошибок в работе ВМГ серийных моделей мультикоптеров.