Драйвер для шагового двигателя из принтера
Порой встает вопрос о том, как бы управлять шаговым двигателем. Как правило, это нужно осуществить, при проектировании какой-нибудь самоделки или более серьезного проекта, например станка с числовым программным управлением. Естественно, такое управление можно купить. Но, драйвер для шагового двигателя из принтера также можно сделать. Это будет самый простой вариант, который наглядно продемонстрирует возможность управлять этим устройством.
Понадобится старый принтер или сканер, можно неработающий. Оттуда, собственно, и будет извлечен шаговый двигатель, если такового нет в наличии. Также из платы потребуется выпаять управляющую микросхему под названием ULN2003. Она может быть и другая, в разной технике стоят различные микросхемы. Подойдут её аналоги: TD62003, отечественная К1109КТ22, более популярная MC1413, L203 и SG2003.
В принципе, подойдут и собратья этих микросхем, такие как ULN2023A, ULN2803 и им подобные. Стоит только смотреть даташиты. Микросхемы можно купить или выпаять из подобной техники. При выпаивании стоит быть осторожными, так как такие электронные компоненты извлекаются сложнее, и есть угроза повреждения их ножек.
Схема подключения проста.
Потребуется приобрести разъем DB-25, который будет подключаться к порту компьютера, для управления двигателем, в случае, если конструируется ЧПУ станок. Диапазоны входного напряжения указаны для конкретно этой микросхемы. Остальные микросхемы, возможно, потребуют отличного от этого напряжения питания.
В качестве источника питания отлично подойдет компьютерный блок питания. В принципе, подойдет любое зарядное или БП, напряжением от 12В до 24В, с током от 350мА.
Стоит отметить, что желательно обладать технической документацией к модели используемого двигателя, что упростит его подключение к драйверу.
Сам драйвер выглядит так:
В случае если документация не найдена на двигатель, то попробовать найти шины питания требуется в первую очередь. Сделать это можно, как наугад, с возможностью спалить микросхему, так и используя батарейку, к примеру, если двигатель рассчитан на небольшое напряжение.
Если конструкция делается для станка с ЧПУ, то на компьютер потребуется скачать программу Turbo CNC и настроить её под свои нужды.
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Шаговые двигатели: особенности и практические схемы управления. Часть 2
Выше были рассмотрены наиболее важные общие вопросы использования шаговых двигателей, которые помогут в их освоении. Но, как гласит наша любимая украинская поговорка: «Не повірю поки не провірю» («Не поверю, пока не проверю»). Поэтому перейдем к практической стороне вопроса. Как уже отмечалось, шаговые двигатели – это удовольствие не из дешевых. Но они имеются в старых принтерах, считывателях гибких и лазерных дисков, например, SPM-20 (шаговый двигатель для позиционирования головки в дисководах 5"25 Mitsumi) или EM-483 (от принтера Epson Stylus C86), которые можно найти у себя в старом хламе или купить за копейки на радиобазаре. Примеры таких двигателей представлены на Рисунке 8.
Наиболее простыми для начального освоения являются униполярные двигатели. Причина кроется в простоте и дешевизне их драйвера управления обмотками. На Рисунке 9 приведена практическая схема драйвера, использованного автором статьи для униполярного шагового двигателя серии P542-M48 [6].
| Рисунок 9. | Драйвер униполярного шагового двигателя. (Дополнительная информация по подключению на Рисунках 10 и 12). |
Естественно, что выбор типа транзистора для ключей управления обмотками должен происходить с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое соединение MOSFET с ИМС коммутатора может быть недопустимым. Как правило, в затворах устанавливаются последовательно включенные резисторы небольших номиналов. Но в ряде случае необходимо предусмотреть еще и соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с небольшим током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить, по крайней мере, 15 мА (хотя для нормальной работы ключа необходимо, чтобы ток базы равнялся 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы. Как хороший компромисс, можно использовать IGBT, сочетающие в себе достоинства полевых и биполярных транзисторов.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC(ON) MOSFET, но с учетом рекомендаций, описанных выше. Мощность, рассеиваемая на ключах для выбранного в качестве примера двигателя серии P542-M48, при полной остановке ротора не превысит
Транзисторы IRLML2803 с RDC(ON) = 0.25 Ом имеют допустимую мощность рассеяния 540 мВ и постоянный ток стока 0.93 А при температуре 70 °С. Так что, они полностью соответствуют требованиям и обеспечат надежную работу драйвера. В большинстве случаев, учитывая низкие частоты коммутации, проведенной выше оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их выбора и полного расчета можно воспользоваться методикой, приведенной, например, в [7].
Еще одним важным моментов является правильный выбор так называемых снаберных диодов, шунтирующих обмотку двигателя (VD1…VD4 на Рисунке 9). Назначение этих диодов – гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом. Обратите внимание, что в мощные MOSFET такие диоды, как правило, уже встроены.
Режим управления двигателем задается коммутатором. Как уже было отмечено выше, наиболее удобным и эффективным является управление с перекрытием фаз (Рисунок 4б). Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора, который использовал автор статьи как в ряде отладочных модулей (в том числе, и с приведенным выше драйвером), так и для практических применений, приведена на Рисунке 10.
| Рисунок 10. | Схема универсального коммутатора шагового двигателя (с реверсом). |
Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны). Временная диаграмма работы коммутатора приведена на Рисунке 11.
 |
|
| Рисунок 11. | Временная диаграмма универсального коммутатора с реверсом. Верхние две осциллограммы – Q1 D2-2, Q2 D2-2; нижние две – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз. |
Хочу обратить внимание читателей: в Интернете вы могли встретить похожую схему, выполненную не на D-триггерах, а на JK-триггерах. Будьте внимательны! В ряде этих схем допущена ошибка в подключении ИМС. Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной, а диаграмма управления будет аналогичной той, которая приведена на Рисунке 11 (осциллограммы до переключения очередности фаз).
| Рисунок 12. | Упрощенная схема коммутатора шагового двигателя (без реверса). |
Поскольку особых требований к сигналу «ШАГИ» не предъявляется, для его формирования может использоваться любой подходящий по уровням выходного сигнала генератор. Для своих отладочных модулей автор использовал генератор на базе ИМС таймера 555 (Рисунок 13).
| Рисунок 13. | Регулируемый генератор импульсов для коммутатора шагового двигателя. |
Для питания собственно двигателя можно использовать схему, приведенную на Рисунке 14, а схему коммутатора и генератора питать или от отдельного источника питания +5 В или через дополнительный маломощный стабилизатор. Земли силовой и сигнальной частей в любом случае необходимо разделить.
| Рисунок 14. | Схема питания шагового двигателя с режимами удержания и выключения. |
Схема на Рисунке 14 обеспечивает подачу двух стабильных по уровню напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания. (Формулы, необходимые для расчета выходного напряжения, приведены в [8]). Рабочий режим включается подачей высокого логического уровня на контакт «ТОРМОЗ» разъема Х1. Допустимость снижения напряжения питания определяется тем, что, как уже отмечалось в первой части статьи, момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя P542-M48 момент удержания с редуктором 25:6 равен 19.8 Н·см, а момент вращения всего 6 Н·см. Этот подход позволяет при остановке двигателя уменьшить потребление мощности с 5.52 Вт до 1.38 Вт! Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт «ВКЛ/ВЫКЛ» разъема Х1.
Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах VT1, VT2 необходимости нет, и выходы можно подключить непосредственно вместо упомянутых ключей.
Примечание: В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автор использовал катушку SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя можно уменьшить до 16 – 18 В, что не скажется на его работе. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания.
Задача управления биполярными двигателями более сложна. Основная проблема в драйвере. Для этих двигателей требуется драйвер мостового типа, и делать его, тем более в современных условиях, на дискретных элементах – неблагодарная задача. Да, этого и не требуется, так как имеется очень большой выбор специализированных ИМС. Все эти ИМС условно можно свести к двум типам. Первый – весьма популярная у любителей робототехники ИМС L293D STMicroelectronics [9] или ее варианты от Texas Instruments. Они относительно недороги и подходят для управления маломощными двигателями с током обмоток до 600 мА. ИМС имеют защиту от перегрева; устанавливать ее необходимо с обеспечением теплоотвода, которым служит фольга печатной платы [9]. Второй тип – это уже знакомая читателям по публикации в [1] ИМС LMD18245 [2].
Автор использовал драйвер L293DD в схеме для управления биполярным двигателем малой мощности типа 20M020D2B 12 В/0.1 А во время изучения проблемы использования шаговых двигателей. Этот драйвер удобен тем, что содержит четыре полумостовых ключа, поэтому для управления биполярным шаговым двигателем требуется всего одна ИМС. Полная схема, приведенная в [10] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. На Рисунке 15 показано включение ИМС драйвера (с привязкой к коммутатору из Рисунка 10), поскольку именно эта часть сейчас представляет для нас интерес, а Figure 6 (Bipolar Stepping-Motor Control) из спецификации [9] не совсем понятна начинающему пользователю. Она вводит в заблуждение, например, тем, что показаны внешние диоды, которые на самом деле встроены в ИМС и прекрасно справляются с обмотками маломощных двигателей. Естественно, что драйвер L293D может работать с любым коммутатором. Выключается драйвер логическим нулем по входу R.
Примечание: ИМС L293, в зависимости от изготовителя и суффиксов, указывающих на тип корпуса, имеют различия в нумерации и количестве выводов!
| Рисунок 15. | Схема подключения драйвера L293DD. |
Для более мощных двигателей автор статьи использовал драйверы LMD18245. Полная схема тестового модуля приведена на Рисунке 16.
| Рисунок 16. | Схема управления биполярным шаговым двигателем с использованием драйвера LMD18245. |
В отличие от L293DD, LMD18245 является не четырех-, а двухканальным драйвером, поэтому для реализации схемы управления требуются две ИМС. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло. В качестве задающего генератора использовалась схема, приведенная ранее на Рисунке 13, но с увеличенным до 4.7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка BH1, позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «ВЫКЛ» ротор двигателя освобождается, и его вращение импульсами управления становится невозможным. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженной вдвое мощностью потребления. Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях вращения моментом. Необходимо заметить, что поскольку при полношаговом управлении «two-phase-on» включены обе обмотки, ток двигателя удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резисторы R3, R8).
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах (Рисунок 10). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резисторы R3, R8), и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [2]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока выполняется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор, не включенный непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность. Для рассматриваемой схемы максимальный ток в амперах, согласно приведенной в [2] формуле, составляет:
VDAC REF – опорное напряжение ЦАП (в рассматриваемой схеме 5 В);
D – задействованные разряды ЦАП (в этом режиме используются все 16 разрядов);
RS – сопротивление токоограничивающего резистора (R3 = R8 = 10 кОм).
Соответственно, в режиме удержания (поскольку используются 8 разрядов ЦАП), максимальный ток составит 1 А.
В заключение необходимо отметить, что драйвер LMD18245 позволяет реализовать и микрошаговое управление. Как упоминалось выше, такой режим уменьшает, и даже подавляет паразитный резонанс ротора. Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП.
Как можно видеть из предложенной статьи, шаговые двигатели хоть и сложнее в управлении, чем коллекторные, но не настолько, чтобы отказываться от них. Как говорили еще древние римляне: «Дорогу осилит идущий». Естественно, что на практике для многих приложений управление шаговыми двигателями целесообразно делать на основе микроконтроллеров, которые легко сформируют нужные команды для драйверов и выполнят роль коммутаторов. Дополнительную информацию и более детальное рассмотрение проблем, связанных с применением шаговых двигателей, кроме как по упомянутым выше ссылкам [3, 4, 7], можно почерпнуть из ставшей уже классикой монографии Кенио Такаши [11] и на специализированных интернет-сайтах, например, [12].
Есть еще один момент, на который автор статьи хотел бы обратить внимание читателей. Шаговые двигатели, как впрочем, и все двигатели постоянного тока, обратимы. Что имеется ввиду? Если приложить внешнее вращающее усилие к ротору, то с обмоток статора можно снять ЭДС, то есть двигатель становится генератором, причем весьма и весьма эффективным. Автор статьи экспериментировал с этим вариантом использования шаговых двигателей во время работы консультантом по силовой электронике в компании, занимающейся ветроэнергетикой. Необходимо было на простых макетах отработать ряд практических решений. По наблюдению автора статьи, эффективность шагового двигателя в таком применении была выше, чем у аналогичного по параметрам и габаритам коллекторного двигателя постоянного тока. Но это уже другая история.
МК-управление микрошаговым драйвером LB1847 из старого принтера
Данная статья родилась в помыслах изготовить себе трёх-координатный микростанок с ЧПУ для выполнения некоторых минимальных задач по сверлению, фрезерованию и вырезке печатных плат.
В течение некоторого времени мне очень часто на запчасти отдают старые матричные и струйные принтеры по причинам того, что хозяева решили купить себе новый и более совершенный принтер или МФУ, ибо старенький свой принтер уже морально устарел или его ремонт будет стоить соизмеримо с приобретением нового принтера, а старый попросту выкинули.
После разборки и выброса ненужных пластмассовых деталей и внутренней механики, я себе оставлял только печатные платы, шаговые двигатели с пасиками и стальные направляющие, по которым когда-то бегала печатающая головка. Давным-давно я посматривал в них на интересную микросхему, которая питает тамошние шаговые двигатели.
Просто запросив в поиске даташит на данную микросхему, я увидел в ней не просто драйвер с четырьмя парами ключей, а полноценный микрошаговый ШИМ контроллер.
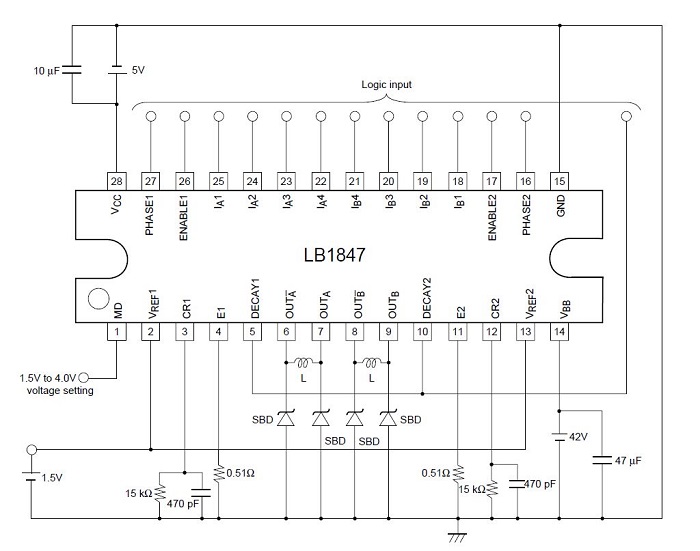
Итак, микросхема LB1847 (даташит PDF) — это драйвер для шаговых двигателей с широтно-импульсным управлением током обмоток биполярного двигателя.
Особенностью данной микросхемы является возможность установки тока на обмотки двигателя в 15 шагов в любой полуфазе.
С возможностью установки медленного затухания тока, быстрого спада тока или смешанного режима, тем самым повышая частотные характеристики, которыми можно добиться высокоточного управления и получить наименьшие вибрации двигателя.
Не буду заниматься комментированием оригинального даташита, вы просто можете запросить его в поиске, найти во вложении к статье и самостоятельно изучить характеристики. Я же двинусь далее.
Схема подключения довольно простая.
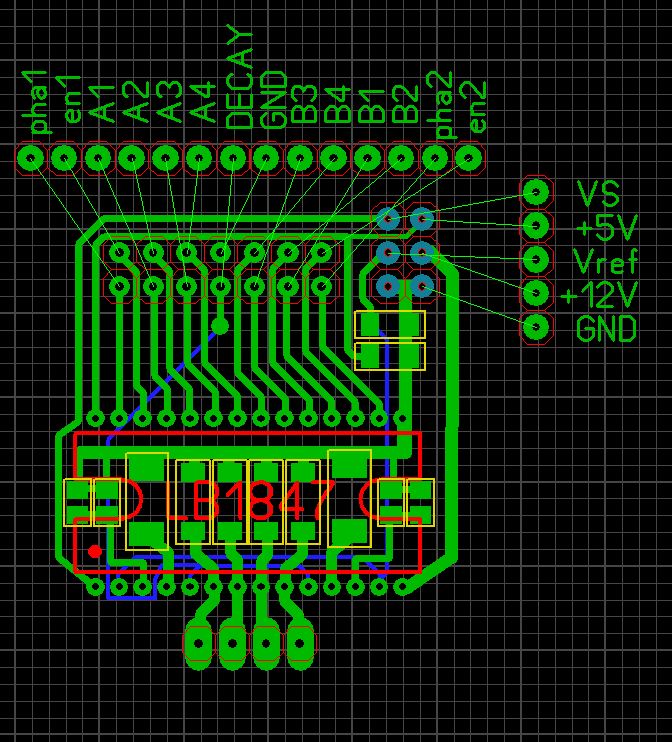
В считанные минуты была нарисована печатка и при помощи ЛУТа сделана плата, обвязку из резисторов, конденсаторов и диодов Шоттки, тоже снял со старой платы:
Далее это все было подключено к одной из моих самодельных тестовых плат с микроконтроллером Atmega32. Конечно, можно использовать любую доступную вам, но нужно учитывать, что должно хватать выводов для подключения, так как на управление используется аж 12 линий.
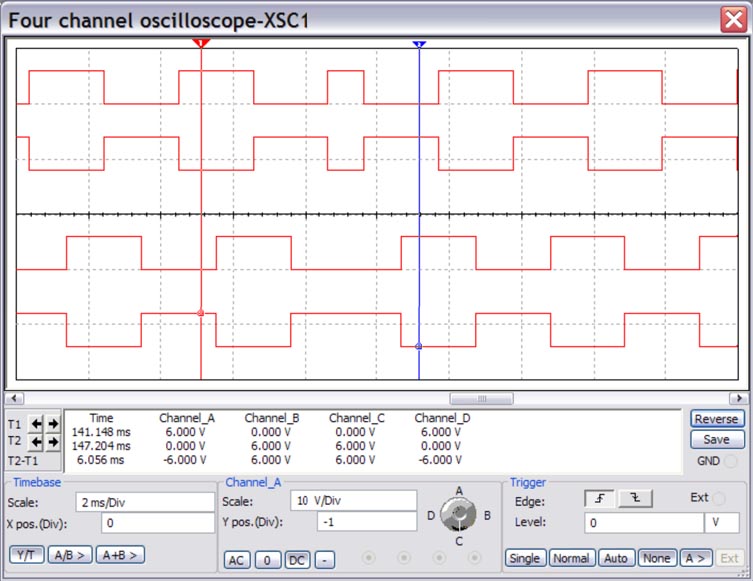
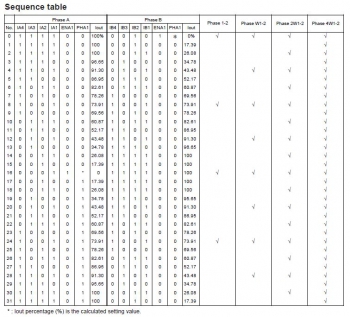
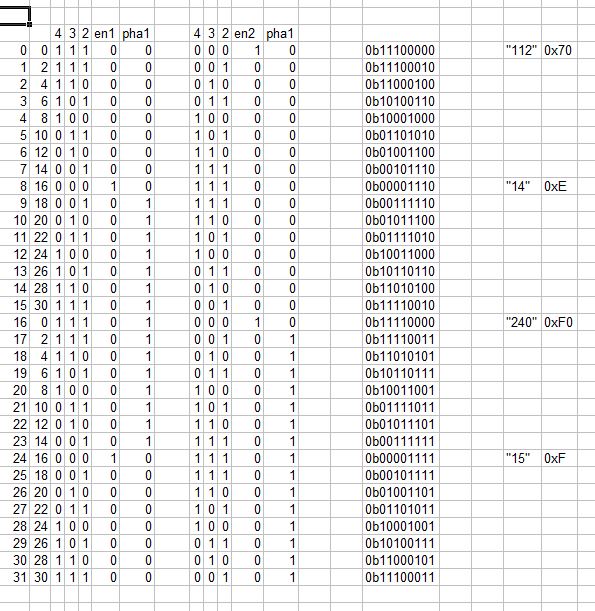
В моём случае изначально тестировался максимально возможный режим работы драйвера в режиме Phase 4W1-2, но потом посчитал что это уже чересчур и настолько уже сверх-точность мне не нужна, потому и перевел на режим Phase 2W1-2, тем самым просмотрев данную таблицу выявил закономерность по первым входам каждого плеча драйвера — на них постоянно присутствует логическая «1» в нужном для меня режиме.
Ну и пусть, просто подключим их на питание микросхемы и забудем про них.
Так мы сократили количество используемых выводов до 10. При дальнейшем исследовании этой таблицы явно заметно, что вывод ENABLE получая логическую «1» (просто обесточивает канал, давая возможность другому каналу притянуть к себе магнитный ротор на максимальном токе), и при этом не имеет значения в какой фазе этот канал находится.
Сразу заметно, что та самая единица появляется тогда как на входах 2-3-4 каждого канала присутствует логический «0». Тут просто вспомним о справочнике микросхем логики и найдем нужный для нас логический элемент. Нам понадобится два элемента 3ИЛИ-НЕ, выбираем микросхему, импортная 7427, отечественная К155ЛЕ4 или подобные.
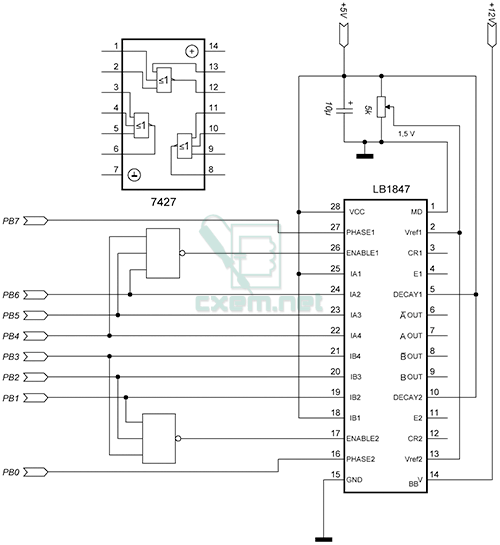
Обвязку полного подключения LB1847 не изображал, так как она ничем не отличается от той, что в даташите. На Vref временно поставил проволочный подстроечный резистор.
Как видно, теперь мы используем только 8 выводов для управления, чего вполне достаточно для использования одного полного порта микроконтроллера.
Теперь приступим к программированию нашего микроконтроллера. Для этого нам потребуется предварительно рассчитать значение выхода целого порта микроконтроллера для каждого микрошага.
Тут я просто использовал программу Excell, где создал таблицу и встроенными формулами рассчитал значение PORTB для режима Phase 2 W1-2 (учтите, что пример в даташите указан только для одной фазы, необходимо продублировать его для второй с изменением направления тока через обмотки ).
Сразу забегу вперед. Я изначально вдоволь наигрался как заданием статических величин по значениям перемещения вала, так и с вводом значения перемещения через порт RS232, но потом всё же захотелось вручную лицезреть сие детище и подключил энкодер, дабы насладиться механическим управлением с визуальным вращением вала шагового двигателя.
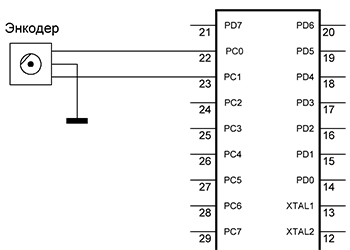
Функция опроса энкодера
Функция опроса энкодера не имеет никаких особенностей, банально читает значения с выводов и по их изменению добавляет или отнимает значение счетчика, тем самым диктуя главной программе направление на вращения. Единственное что опрос у меня сейчас проходит на частоте 100кГц, и мне было лень добавлять отдельный счетчик (три строчки программы), чтобы отсчитывать только полные щелчки оборота энкодера, да это и совсем не нужно на данной стадии тестовых испытаний.
Обработчик прерывания таймера
Аналогичная функция на обработку обратного счета для движения оси шагового двигателя в обратную сторону.
В данную функцию я ввел очень полезную величину, можно задать шаг работы двигателя от 1 до 8. Это я и хочу использовать в дальнейшем, чтобы можно было программно управлять скоростью перемещения.
Например: для холостого перемещения на пару тысяч шагов можно составить простой алгоритм, который может п лавно н ачать с одного микрошага за такт разрешения таймера, и каж дые 10 тактов поднимать на единицу пока не достигнет «8», так будет программно реализован четверть шаг (счетчик тоже будет добавлять или отнимать по 8 шагов), а далее за 100 шагов до окончания пути начать уменьшать значение перешагивания каждые 10 тактов и двигатель плавно остановится на нужном ему значении. Такая реализация программно обеспечит высокую скорость перемещения при максимальной точности перемещения вала двигателя даже под нагрузкой (старт-разгон-работа-торможение-остановка). Можно, конечно, поднять значение и до 16, в таком случае двигатель выйдет на режим полушага.
Главный цикл программы
Для проверок использовался один из биполярных шаговых двигателей с тех самых разобранных принтеров.

Он имеет шаг 7,5 градусов, что соответствует 48 шагам на полный оборот, при 32 микрошагах это выходит точность 1536 микрошагов на полный оборот вала двигателя. Если бы нам не было жалко использовать еще 2 вывода микроконтроллера, то легко можно получить 1/64 шага. А присмотревшись в конструктив этой микросхемы, думаю несложно и поболее 128 шагов сделать, только придется много расчетов произвести на усредненные значения, правда будет серьёзная нелинейность вращения, но и то что мы получили вполне достаточно, незачем нам вращение менее 0,1 градуса.
Энкодер, что я нашел у себя, имеет 24 щелчка на полный оборот, в каждом щелчке 4 импульса изменения состояния, то есть 96 импульсов на полный оборот.
Без использования энкодера программно запускал его на довольно быстрое вращение и действительно чувствовалась сила на валу при том, что я его питаю 12V вместо 24V родного питания принтера.
Вот посмотрите что из этого вышло.
При необходимости можно сохранять в энерго-независимой памяти текущие значения шага, и использовать его при отключениях устройства, только заранее привести значение к нулевому, ибо после отключения-включения устройства полушаг может провернуть вал как в одну, так и в другую сторону. Или просто использовать калибровку (например, на оптопаре или концевике) при включении устройства.
Данная статья была предварительным тестом работы микросхемы LB1847, все собрано практически на коленке, только для уточнения всех нюансов её работы. Далее планируется использовать более продвинутый микроконтроллер (скорее всего STM32) и организация одновременного управления тремя (и более) двигателями.
При необходимости можно еще дополнительно вывести на МК выводы DECAY, MD и программно управлять режимом спада тока при различных условиях.
Как запустить двигатель от принтера схема
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
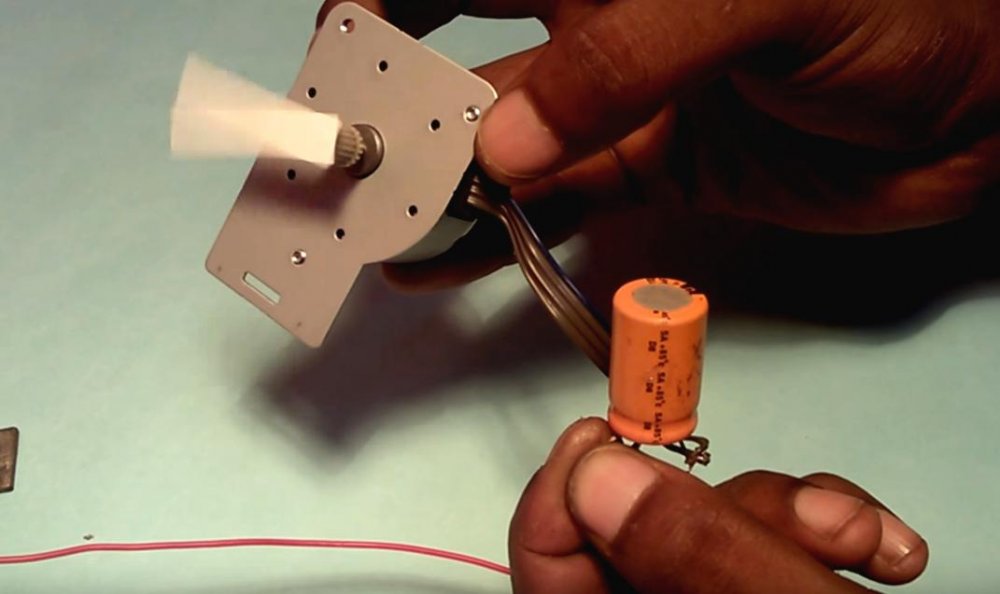
Для эксперимента использовался вот такой шаговый двигатель:
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
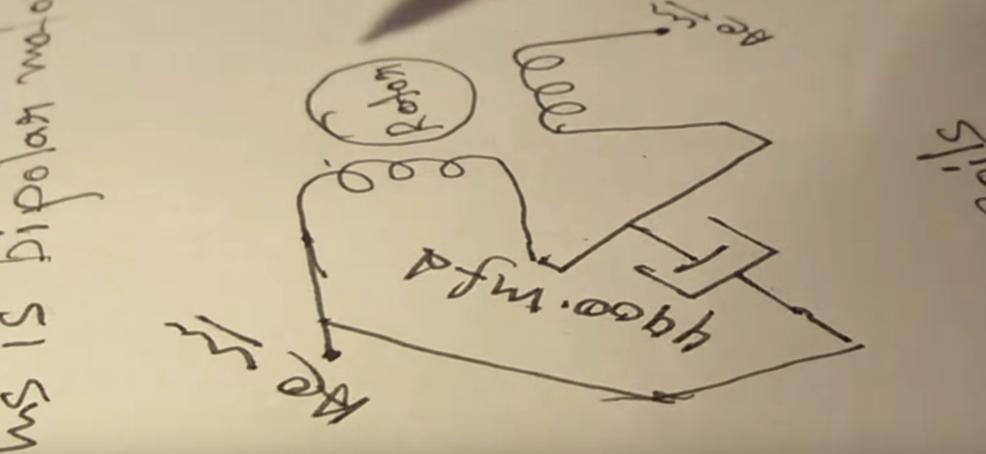
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
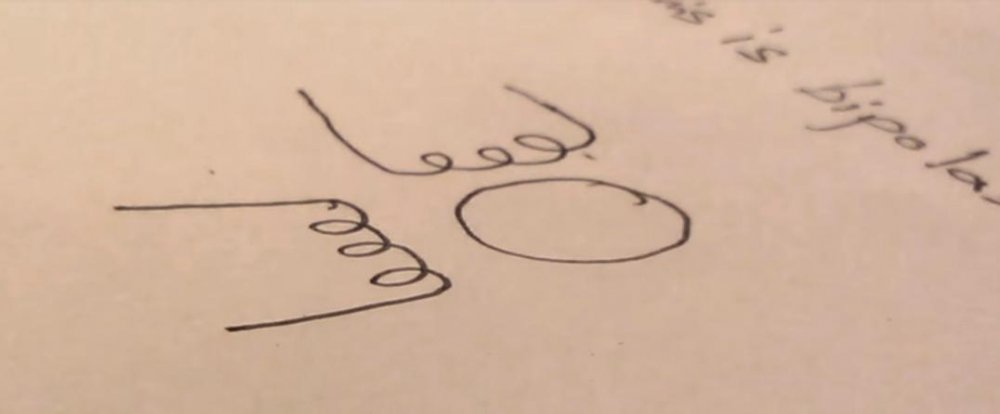
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
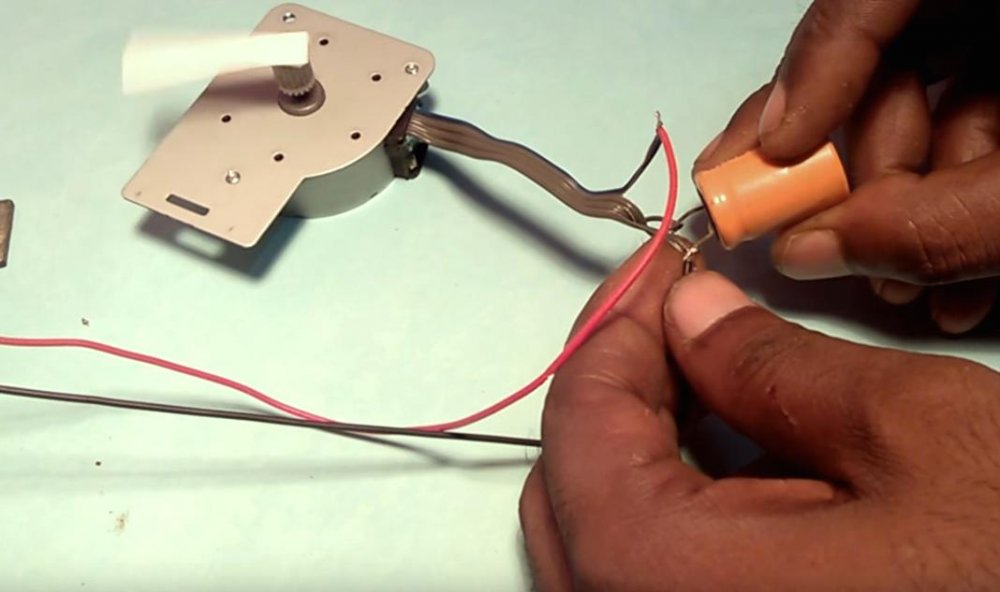
Замыкаем обмотки последовательно, как на схеме ниже.
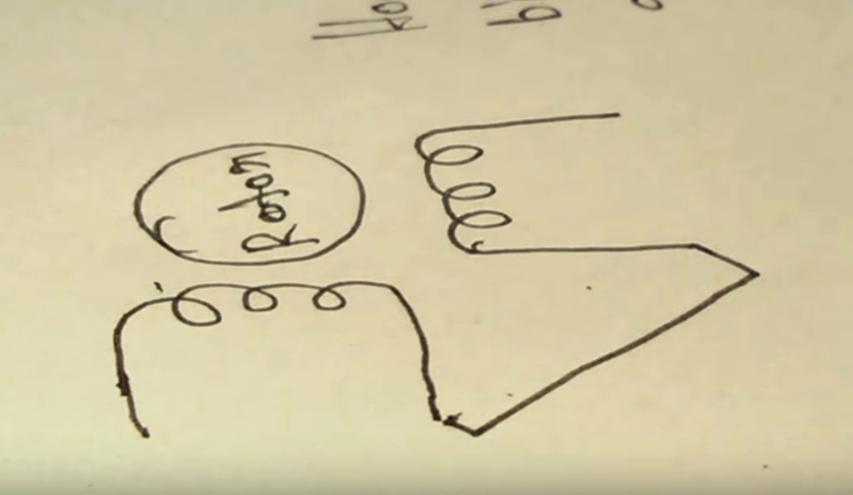
Середину проводов нужно скрутить и спаять.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Как управлять шаговым двигателем без контроллера
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:

Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.

Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося
основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Замкнутые и разомкнутые системы
Системы позиционирования оси позволяют интеллектуальным контроллерам позиционировать оборудование с исключительной точностью. Выдается команда на перемещение в желаемую точку в трехмерном пространстве и машина реагирует очень быстро и точно.
Системы позиционирования обычно используют один из двух способов: системы с замкнутым и разомкнутым контуром. Так в чем же разница между этими двумя подходами к позиционированию?
В системах с замкнутым контуром обычно используются серводвигатели для управления скоростью и положением движущейся оси. Серводвигатели работают так же, как и любой обычный двигатель, когда на них подается питание, они вращаются. Это вращение принимает непрерывное плавное движение. Задача серводвигателя — не только приводить двигатель в действие, но и точно контролировать скорость.
Наряду со скоростью в замкнутой системе также требуется обратная связь по положению. Обычно это обеспечивается энкодером или линейной шкалой. Позиционная обратная связь с контроллером машины позволяет ему быстро двигаться к заданному месту, а затем плавно замедляться, чтобы остановиться на цели.
В системах с разомкнутым контуром нет устройства обратной связи для контроля скорости или положения. Вместо этого расстояние, которое необходимо преодолеть от текущего местоположения, делится системой управления машиной на несколько точных шагов определенного размера. Система управления также определяет оптимальную кривую скорости системы на основе предварительно определенных параметров. Затем команды поступают на шаговый двигатель в виде импульсов. Работа драйвера шагового двигателя заключается в преобразовании командных импульсов в фактические шаги привода двигателя далее шаговые двигатели продвигаются по этим шагам, достигая желаемого результата.
Какие драйвера для шаговых двигателей 3D принтера можно купить?
1. TMC2208, TMC2130, TMC2100. Выходной ток на обмотку с дополнительным охлаждением – до 2 А, пиковый выходной ток 2,5А. Напряжения питания силовой части: 4.75 — 36 В. Дробление шага: 1/2, 1/4, ⅛ и 1/16 с возможностью интерполяции до 1/256. Он используется для снижения уровня шума при работе с 8-битными микроконтроллерами. Может применяться в устройствах с маломощными режимами работы, а так же в оборудовании, где востребована высокая энергетическая эффективность моторов. TMC2208 построен на микросхеме от Trinamic и способен выдавать до 2.5 А на обмотку, чего достаточно для использования в 3D принтерах и ЧПУ. При этом решается проблема шумности работы шаговых двигателей за счёт эффективных алгоритмов формирования управляющих импульсов(StealthChop2™) и управления током.
Тихие драйверы, рекомендуем ставить именно их. Стоит дороже остальных около 15 $.

2. A4988 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А, без охлаждения – до 1 А. Напряжения питания силовой части: 8-35 В. Преимущества драйвера А4988 – наличие защиты от перегрузок и перегрева, возможность регулировки тока и несколько вариантов микрошага. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16. На 9В значительно тише, чем на 12В, без потери крутящего момента. Резкое усиление звука происходит с 11В до 12В. Стоимость около 6 $.

4. DRV8825 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А. Напряжения питания силовой части: 8-45 В. Электрическая и механическая совместимость с драйвером A4988. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32. По отзывам имеют конструктивный недостаток, что выражения в появлении дефектов на поверхности отпечатка в виде вертикальных полос(полосы зебры). Недостаток можно устранить установив TL-Smoother, но гораздо рентабельнее будет купить вместо них TMC2208. Стоимость около 6 $.

Сглаживающее устройство TL-Smoother
Плата, которая соединяет шаговый драйвер и шаговый двигатель, уменьшая шум и вибрации на вашем 3D-принтере, снижая риск образования дефекта«полоса зебры».
Эта небольшая плата имеет восемь выпрямительных диодов, которые улучшают форму волны шагового двигателя, в частности, для более старых более дешевых шаговых драйверов, например DRV8825 и A4988. Улучшение формы волны снижает шум двигателя за счет уменьшения вибрации. Поскольку вибрации уменьшаются, качество печати также улучшается. Просто установите плату между драйвером и шаговым двигателем, ориентация не имеет значения. Для удобства в комплект входит небольшой 4-проводной разъем длиной 20 см, чтобы подключить плату к электронике. Стоимость около 7 $

Дефект полосы зебры или муар
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)

Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive

Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive

Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Контроллер управления шаговыми двигателями, сделанный своими руками
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):


Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Главное — подобрать экспозицию:

Идет процесс травления печатной платы:

Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:

Паяльник старенький да удаленький:



Обратная сторона платы, начался процесс отладки:
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:

В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
Контроллеры ШД
Контроллеры – платы коммутации, используемые для преобразования управляющих команд, поступающих с ПК, в последовательность импульсов для драйверов. Плата может иметь дополнительный функционал – разъемы для подключения концевых ограничителей, силовые реле, разъемы для управления шпинделем. Подключается к компьютеру через LPT или USB интерфейс.
Многоканальные драйверы ШД –устройство объединяющее в себе драйвера ШД и плату коммутации. Подключаются к ПК непосредственно управляют ШД. Также в состав контроллера входят такие функциональные возможности как таймер СОЖ, конвертор ШИМ для инвертора, силовые реле, разъемы для подключения датчиков ограничения линейных перемещений. Драйвера могут исполняться на различное количество ШД.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Как подключить шаговый двигатель без контроллера
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии. 
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A. 
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.

В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: – 1 картонная коробка
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
- 1 разъем DB-25 – провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка – разные шайбы и шурупы – куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC ( отсюда)
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку. 
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный – к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 – с выводом 3 ULN2003 и вывод 5 – с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания.
Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.







Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством – это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку «tcnc». Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.





Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите «C: cncTURBOCNC». Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно «A: cncTURBOCNC». Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню «Configure». При помощи клавиш со стрелками выберите «number of axis». Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем «1». Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню «Configure» выберите пункт «Configure axes», затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке «Drive Type». При помощи стрелки вниз выберите пункт «Phase». Снова при помощи Tab выберите ячейку «Scale». Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную – 175. Нажимайте Tab пока не дойдете до пункта «Last Phase». Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.









Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске.
Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.









Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо.
Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.


Шаг 9.
Изготовление корпуса – это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия.
То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.













Шаг 10.
Изготовление корпуса
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: – ЧПУ устройство – плоттер – или любую другую вещь, которой нужно точное управление движением. – добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле «number of axis» введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее: