Что такое количество пар полюсов в асинхронном двигателе
Подключение асинхронного двигателя к однофазной сети
Обратимся к конструкции трехфазного асинхронного двигателя. Как мы знаем, рабочих фаз двигателя – 3, и клемм для их подключения тоже 3. А в однофазной бытовой сети 220 Вольт проводов всего два – фаза и ноль. Что подключить на третью клемму двигателя? Если на нее подключить ответвление от любого из этих двух проводов, то мы получим просто короткое замыкание со всеми вытекающими последствиями.
Выходом является подключение такого ответвления через конденсатор. Слово «конденсатор» переводится на русский язык как «накопитель». Как известно, работает он по принципу «заряд-разряд». То есть, включенный в сеть конденсатор, какое-то время накапливает заряд, а потом, разряжаясь, отдает его обратно в сеть. Времени, в течение которого конденсатор накапливает заряд, вполне достаточно для того, чтобы фаза, от которой он питается, «ушла» вперед, сдвинулась по времени. Сдвинувшись, фаза как бы «освобождает место» для того разряда, который выдаст конденсатор, и исключает возможность «короткого» замыкания. Из-за того, что своей работой конденсатор «сдвигает» фазы, он называется фазосдвигающим. Более подробно про работу конденсатора в цепи переменного тока можно прочитать в этой статье. Таким образом, создается третий провод необходимый для подключения двигателя.
Схемы подключения к однофазной сети
Здесь все достаточно просто. Мы должны соединить конденсатор между двумя фазами. В схеме со звездой это будет выглядеть вот так.
Читайте также: Радиус атома — Википедия с видео
Для того, чтобы поменять вращение двигателя, нам надо просто поменять местами фазу (L) и ноль (N) местами.

Восстановление маркировки обмоток
Если точнее, маркировка обмоток нужна только для определения направления намотки катушек обмотки. Конец и начало обмотки обозначают только с этой целью. Дело в том, что при включении обмотки в работу в ней начинают возникать вихревые токи, которые движутся по направлению «от начала к концу». Если обмотки включить по принципу «начало с началом, конец с концом», то токи суммируются, обмотки превратятся в один большой резистор и возникнет огромный суммарный ток. Двигатель начнет сильно гудеть и не будет вращаться. Очень быстро начнут нагреваться обмотки, и двигатель сгорит. Причем, вполне возможно, вспыхнет настоящее пламя оранжево-синего цвета с очень вредным и неприятным запахом.
Существует способ определения концов и начал обмоток.
Весь этот процесс очень хорошо показан на видео. Автор этого видео использовал для проверки сетевое напряжения в 220 Вольт, что я крайне не рекомендую делать. Используйте понижающие трансформаторы, либо автотрансформатор.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов. Синхронная частота вращения для различного количества полюсов
| Числополюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Тип расцепителя
Тепловой – простой, дешевый и надежный расцепитель. Не боится загрязнений и вибраций. Время срабатывания определяется от значения тока перегрузки. Минусы: восприимчивость к перепадам температуры, вероятность ложных срабатываний при нагреве, постоянное потребление электроэнергии. Такой автомат устанавливают вдали от источников тепла.
Электромагнитный – характеризуется простой конструкцией и стойкостью к механическим воздействиям, например, ударам или вибрациям. Недостатки: мгновенное срабатывание, возникновение магнитного поля.
Электронный – имеет несколько вариантов настроек и точно их выполняет. К преимуществам относится и наличие индикации причины срабатывания устройства. Минусы: высокая стоимость, чувствительность к механическим нагрузкам и электромагнитным полям.
Магнитно-гидравлический – стойкий к вибрациям и температуре окружающей среды. Встречается в силовых автоматических выключателях.
Параметры электродвигателя: таблица
| Наименование параметра | Единица измерения | Примечание |
| Тип | ||
| Номинальная мощность | Киловатт | |
| Номинальный ток | Ампер | Для трехфазных электродвигателей зависит от типа соединения обмоток |
| Номинальное напряжение | Вольт | |
| Коэффициент мощности (КПД) | ||
| Коэффициент полезного действия (cos ϕ) | % | |
| Номинальная скорость вращения | Обороты в минуту |
Но иногда табличка отсутствует, либо прочесть ее невозможно. При эксплуатации двигатель неоднократно окрашивают, нередко – вместе с табличкой. Поэтому приходится определять его параметры методом измерений.
Выбор автомата по количеству полюсов
На сегодняшний день автомат стал оборудованием, которое очень часто используется в разных отраслях. Низковольтная сеть состоит из многих элементов. Это и силовые цепи, которые являются источником питания для различного оборудования, и связные цепи, и цепи, которые выполняют вспомогательные функции, напряжением 1000 В максимально. Выбор полюсности выключателя, что же стоит учитывать. Главным критерием будет число полюсов. Оно напрямую зависит от параметров сети, для которой выбирается такой выключатель. Более детально остановимся на области применения автоматов с одним, двумя, тремя и четырьмя полюсами. Читайте, что делать если сработал автоматический предохранитель.
Электродвигатели в составе мотор-редукторов
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.

4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.

Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.

Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
Теперь посмотрите это полезное видео:
Многие наверняка видели и уже имеют в своем гардеробе такие замечательные аксессуары из цветов канзаши. Эта статья научит вас технике их изготовления. Цветы из атласных лент – канзаси.
В данном уроке вы узнаете что такое модульное оригами и для изучения будет представлена схема сборки двойного лебедя, которого вы сможете собрать своими руками.
Для владельцев садовых участков, теплиц, гаражей и любых помещений, нуждающихся в утеплении. Загрузив такую печь один раз дровами можно будет потом пару суток к ней вообще не подходить.
Сейчас в продаже всё больше чупа-чупсы, твиксы и прочие заморские изделия. А почему бы Вам сегодня не сделать петушка на палочке и не порадовать своё дитя таким нестандартным подарком.
Как в походных, домашних и дачных условиях готовить продукт к копчению, подбирать коптильные дрова, мастерить самодельные коптильни, коптить продукт, и все это делать своими руками.
Параметры электродвигателя : тип соединения обмоток
Это очень важный параметр трехфазного электродвигателя. Все шесть выводов начал и концов обмоток выведены в барно двигателя. Подключить их можно либо в звезду, либо в треугольник.
Рядом с символами «треугольник/звезда»
на табличке указывается номинальное напряжение
. Это означает, что при включении в сеть трехфазного тока напряжением 380 В обмотки двигателя нужно соединить в звезду. Ошибка в соединении приведет к выходу электродвигателя из строя.
Номинальный ток также указывается через дробь. В описанном случае необходимо значение, указанное в знаменателе.
Ток автоматического выключателя
Токи автоматов бывают из следующего ряда:
0,5, 1, 1,6, 2, 3,15, 4, 5, 6, 8, 10, 13, 16, 20, 25, 32, 40, 50, 63.
Жирным выделены номиналы, наиболее часто применяющиеся в быту. Есть и другие номиналы, но о них сейчас не будем.
Данный ток для автоматического выключателя является номинальным. При его превышении выключатель выключится. Правда, не сразу, о чем сказано ниже:
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Как выбрать автомат защиты
При возникновении трудностей с электричеством, важной задачей является своевременное выключение питания, ведь за счет этого будет в порядке проводка и не возникнет пожар. Именно поэтому стоит отнестись с ответственностью к выбору автоматического выключателя.

Причем не стоит придерживаться принципа «Чтоб выключалось как можно реже» — именно такой выбор может способствовать пожару.

Впрочем, автомат выбирают, основываясь на три главных параметра;
- Токовый номинал;
- Токовая отсечка;
- Вид электромагнитного прерывателя

Во время ремонта или установки электропроводки практически каждый из нас за незнанием ошибочно предполагает, что самый лучший автоматический выключатель – это тот, который способен выдержать самый большой ток, тем самым предостерегая цепь от возможных повреждений и пожара.

Но это совсем не так, иначе все проблемы решались бы после подключения автомата воздушного типа. Для того, чтобы действительно обеспечить защиту сети, надо выбирать устройство с нужными характеристиками.

Механическая характеристика двигателя
Механической характеристикой называется зависимость момента от скольжения при постоянном напряжении и частоте сети.
На рис. 19 показана механическая характеристика двигателя. При пуске двигатель развивает пусковой момент МП
(S = 1); если пусковой момент больше момента сопротивления рабочей машиныМС
, то ротор двигателя развернется и двигатель будет работать в точке a характеристики.
Увеличивая момент сопротивления рабочей машины МС
, мы будем увеличивать скольжение, и точка a начнет перемещаться по характеристике к точке В точке 1 двигатель развивает максимальный момент, скольжение, соответствующее максимальному моменту, которое называется критическим —SКР
. При увеличении момента
МС
выше момента
Мm
скольжение быстро растет и ротор двигателя остановится (происходит «опрокидывание» двигателя).
Отношение пускового момента к номинальному называется кратностью пускового момента:

Рис. 19. Механическая характеристика асинхронного двигателя
Кратность пускового момента указывается в каталогах справочных данных, она должна быть больше 0,9.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя:
Перегрузочная способность указывается в каталогах. Она обычно находится в пределах 1,7—2,5. Механическая характеристика имеет две характерные ветви: ветвь (A—B
) — устойчивая часть характеристики (с увеличением скольжения момент двигателя растет); ветвь (В
—
С
) — неустойчивая часть характеристики (с увеличением скольжения момент двигателя уменьшается). Если в цепь двигателя с фазным ротором вводить активное сопротивление, то максимальный момент, не изменяясь по величине, перемещается в область более высоких скольжений (рис. 20, механическая характеристика II). Можно подобрать такое сопротивление в цепи ротора, что максимальный момент будет при пуске.

Рис. 20. Механическая характеристика асинхронного двигателя с фазным ротором
Кривая I для двигателей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости. Асинхронный двигатель с фазным ротором с сопротивлениями в цепи ротора имеет более мягкую характеристику (кривая II). Увеличивая сопротивление в цепи ротора, можно сдвинуть максимальный момент и сравнять его с пусковым моментом.
Номинальный отключающий ток утечки
Эта величина показывает ток утечки, при котором срабатывает УЗО / дифавтомат. По номинальному отключающему току судят о чувствительности прибора. Единица измерения – миллиамперы (мА).
Ориентировочные значения номинального отключающего тока:
- 10 мА – для стиральной и посудомоечной машины, бойлера и другой техники, относящейся к влажной группе;
- 30 мА – для розеточной и осветительной группы;
- 100 мА – для защиты проводки от возгорания в маленькой квартире;
- 300 мА – для защиты проводки от возгорания в офисе или частном доме.
Определение точного количества
Выше мы уже описали, как проводить регулировку скоростных показателей, используя число пар полюсов двигателя. А как самостоятельно определить точное количество данных пар?
Скорость оборотов мотора асинхронного типа в большинстве ситуаций интерпретируется как угловая частота оборотов его ротора. Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Трехфазные силовые агрегаты поддерживают возможность электропитания и от сетей с одной рабочей фазой, но для реализации такой идеи нужно подсоединить конденсатор. Осуществить это стоит не просто, а одновременно одной или нескольким его намоткам, ориентируясь на уровень напряжения сети питания. Принципиально на конструкцию двигателя это не повлияет.
Если в процессе работы ротор, находясь под нагрузкой за 1 минуту вращается 2760 раз, то его угловая частота будет равняться 289 радиан в секунду. Рассчитать это довольно просто:
2760 * 2пи/60рад.
Получившийся показатель является более техническим, неудобным для восприятия рядовым пользователем. Именно поэтому, рабочие показатели мотора указывают просто и понятно — в оборотах за одну минуту.
Уровень слаженной скорости такого мотора (без учета такого важного значения, как скольжение) равняется 3000 вращений. Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Далее мы рассмотрим о другом методе определения уровня скорости оборотов условного трехфазного агрегата, проведя визуальный осмотр статора. Оценивая внешний вид стационарной детали, расположение медных намоток и точное число пазов, возможно с легкость точно определить количество оборотов мотора. Особенно такая возможность полезна, если в наличии нет такого измерительного устройства, как тахометр.
Регулировка скорости работы мотора
Многие задаются вопросом: — Для чего необходимо обладать информацией о количестве пар полюсов? Первое, что отличается удобством выполнения при помощи этих данных – это регулирование скорости вращений в асинхронном двигателе.
В современных производственных отраслях применяется довольно широкий перечень промышленного оборудования, выполняющего определенные задачи. При этом, нет необходимости обеспечивать плавность регулировки скорости оборотов, достаточно обладать ограниченным перечнем скоростей (только самых важных, чаще всего используемых). К такого типа агрегатам относятся станки в металлообрабатывающей и деревообрабатывающей отраслях, лебедки в добывающих скважинах, центробежных разделителях и др.
Лимитированное число рабочих скоростей оборотов с легкостью обеспечивается многоскоростными моторами короткозамкнутой конструкции (с экранированными полюсами). Здесь могут иметь место сразу две модификации такого оборудования:
- с одной статорной обмоткой, которая поддерживает функцию переключения, для реализации сразу разных пар полюсов;
- с несколькими намотками стационарного компонента, которые располагаются в одних и тех же пазах.
Взаимодействие роторной МДС со статорным элементом, реализуется только в ситуациях полного соблюдения равенства в количествах обмоточных пар этих двух компонентов. Именно поэтому, меняя количество полюсных пар на статоре, нужно обязательно поменять их и в роторе.
Если же имеет место асинхронный агрегат с якорем фазного типа, то для того, чтобы выполнить данное условие, необходимо иметь в наличии вспомогательных колец контактов. Эта особенность способствует увеличению внешних габаритов конструкции и, следственно стоимость.
Якорь короткозамкнутого регулирования с намоткой типа «беличья клетка» имеет в арсенале возможность автоматического генерирования набора пар, который будет равным такому же перечню, но уже со статорной движущей силой. Это качество обусловливает применение якорей коротких замкнутых в асинхронных моторах, работающих со многими скоростями.
Многоскоростные силовые агрегаты сразу с большим количеством катушек на статоре, уступают моделям с единой намоткой. Это выражается в бюджетном и технологическом плане. Устройства с множеством катушек слабо используют статорную обмотку, демонстрируют нерациональное использование пазов. Коэффициент полезного действия и cos ϕ на порядок ниже оптимальных показателей.
Эта важная особенность обусловливает то, что все чаще в производственной отрасли применяются электрические двигатели многоскоростного действия на 1 обмотку. Это выгодно, ведь агрегаты поддерживают переключение сразу на разный объем пар.
По сути, посредством переключения направленности движения токов в сфере намоток, параллельно меняют и способ работы с магнитодвижущими силами в середине статорной расточки. В результате получится измененная скорость оборотов МДС и, исходя из этого – непосредственно потока. Чаще всего применяется переключение в пропорции 1 к 2. Из этого следует, что намотки каждой из фаз создаются в форме двух сфер. Смена направления движения токов в какой-то из них дает возможность получать требуемое изменение объема полюсности вдвое.
Для большей информативности, давайте приведем пример таких действий на двигателе, который переключается на 8 точек и 4.

Асинхронный двигатель намотка
Для более простого восприятия, мы взяли изображение намотки всего одной фазы, конструкция которой включает две секции.
Если реализовывать поочередное подсоединение секций – при подключении окончания первой (1К) со стартом другой (2Н), то в результате у нас будет 4 пары точек иле же просто 8 полюсов. Когда провести замену направленности перемещения тока в другой области на обратную, тогда количество полюсов, которые генерируются намоткой, уменьшится вдвое. Какие-либо вариации тока в среде 2Н можно провести посредством разрывания перемычки между секциями 1К и 2К. Число сгенерированных полюсов станет в 2 раза меньше, что информативно продемонстрировано на изображении Б.
Такая смена числа полюсов получается в результате изменения направленности электрического тока в секции №2, посредством применения слаженного запуска с первой. Это указано на изображении В. Здесь, также, как и в ранее описанной ситуации, намотка создает 4 полюса, что полностью отвечает вдвое большим показателям оборотов электрического агрегата.
Когда мы осуществляем сопоставление двух намоток в многоскоростных машинах, стоит преимущественно использовать те схемы, которые обеспечивают в процессе работы требуемый характер зависимостей показателей. К последним относятся момент, допустимый по нагреву от скорости. Схемы кроме всего прочего должны иметь самое малое количество выводов и контактных элементов.
Группирование соединений
Опять таки для лучшего удобства, давайте введем критерий, с помощью которого можно будет легко и просто относить обмоточные соединения к определенной группе. Момент, который развивает электромотор с короткозамкнутым якорем рассчитывается по такой формуле:
- p – точное число полюсных пар в статорной намотке;
- N2 – точное количество стержней катушки якоря при реализации типа «беличья клетка»;
- I2 – уровень тока роторного стержня;
- Ψ2 – угол сдвигания тока векторного типа, по отношению к электродвижущей силе ротора;
- Ф – поток магнитного действия одной полюсной пары.
Исходя из условий нагревания ротора (если пренебрегаются условия вентилирования), ток (I2), работая с несколькими парами полюсов, должен всегда находиться на одном уровне. Косинус угла Ψ2 от холостого хода и до номинального момента должен быть максимально приближенным к показателю 1.
При тщательном соблюдении всех этих условий момент машины выражается таким равенством:
М = с1*Фр.
(1)
Показатель С1 в свою очередь выражается другой понятной формулой:

Формула С1
Справедливости ради укажем формулу расчета электромагнитного момента, который измеряется в джоулях. (2)

Электромагнитный момент в джоулях
Приравняв два уравнения (1) и (2) мы получим такое значение Р, которое будет равняться 314 С1Ф.
Показатель мощности электромагнетизма силового агрегата при любом объеме полюсных обмотки статора, вычисляется при помощи соотношения напряжения элемента по фазам к количеству витков, которые находятся в фазной намотке и соединены последовательным способом.
Применяя данную особенность, можно с высокой долей точности проанализировать все описанные ранее методы переключения количества пар у полюсов. Давайте же посмотрим на изображения, в которых отображаются все ключевые случаи переключений с большого количества полюсных пар на меньшие. В нашей примерной ситуации это 8 полюсов на четыре.

Схемы переключения секций обмотки статора 8 и 4
Как можно видеть на схеме из рисунка А – все две секции являются обтекаемыми токами, движущимися в одном направлении. Все они полностью соответствуют высокому числу пар полюсов. В правой схеме (на рисунке Б) мы имеем встречное направление токов, благодаря чему можно судить о меньшем количестве пар полюсных пар.
Во всех этих случаях количество подключенных последовательным способом витков на обмотках 1 фазы остается на стабильном уровне. К ним дополнительно прилагается фазное напряжение, также на стабильно одинаковом уровне.
Исходя из всего вышеперечисленного, соотношение показателей мощностей в обоих случаях равняется 1, что указывает на работу со стабильным значением мощности (схематически – Р = константа). В этой ситуации для того, чтобы сохранить мощность на постоянном уровне, при изменении скорости на увеличенную вдвое, необходимо изменить показатель момента в обратной направленности его скорости.
Схематическое изображение переключения полюсов статорных катушек в пропорции 1:2

Принципиальная схема переключения полюсов обмотки статора в соотношении 1 к 2
Как можно видеть на графиках, подключение параллельного типа обмоточных секций позволяет изменять направление подачи тока в каждой из реализованных сфер. Данное значение отвечает за уменьшение числа пар. Вместе с этим, намотка создает сразу 2 звезды симметричного расположения, которые включаются на линейное напряжение. Применяя этот критерий, можно заметить, что когда осуществляется переход на увеличенную скорость оборотов, значение мощности увеличивается вдвое:
Значение мощности увеличивается вдвое
Данные показатели полностью соответствуют утверждению М = константа.
Условное сравнение схем
Если проводит сравнительный анализ всех вышеописанных схем по отношению к требуемому количеству выходов и контактных элементов на управленческий аппарат, можно заметить несколько особенностей:
- при подключении при помощи принципиальной схемы, необходимо иметь как минимум 9 выводов и 12 контактов;
- схема переключения при подсоединениях секций, дает возможность уменьшать число выходов до шести, а контактных деталей до восьми.

Принципиальная схема переключения полюсов обмотки
Представленные схемы указывают, что на 2-х скоростях соединения намоток были использованы «звезды» параллельного или последовательного типа. Если возникает необходимость внести изменения в напряжение, которое поступает на однофазную намотку, следует использовать сопряжение катушек с применением схемы обыкновенного или сдвоенного треугольника. В отдельных ситуациях можно даже комбинировать способы звезда – треугольник. При выборе последнего варианта все 3 секции намоток создают треугольник, а остальные 3 — соединяются с вершинами фигуры, создавая «лучи» типа «звезда».
Такие соединения активно применяются в приводах разнотипного оборудования, например, в прочных режущих станках. Также нередко модели используются в ситуациях, когда есть необходимость осуществить поочередное подключение треугольной схемой на 2 звезды, применяя параллельную компоновку.
Когда машина функционирует на малых вращениях, 2 секции каждой отдельной фазы, подключенные последовательным способом, создают линии треугольника, на углы которого осуществляется бесперебойная подача питания. В таком случае все сферы фазовой намотки окружаются током с одинаковыми показателями, что полностью совмещается с большим количеством пар.
С целью получения больших скоростных значений верха треугольника, который получился путем обмотки фаз, необходимо замкнуть коротко, а кабели подачи питания перенести в усредненные точки подключения обмоточных секций для каждой отдельной фазы. Исходя из этого, будут иметь место 2 звезды, подключенные параллельно.
Перед тем, как начать своими руками изготавливать обмотки, стоит знать, что процесс создания многоскоростных однообмоточных решений на порядок сложнее, чем двухобмоточных. То, сколько полюсов необходимо реализовывать в моторе, определяет скорость и интенсивность вращения вала силового агрегата и, как следствие – его общую продуктивность.
Способы определения характеристик электромотора
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС. Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z 1 / y, где 2р – количество полюсов, Z 1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z 1 b / h или 2 p = 0,5 D i / h,
где 2р – количество полюсов, Z 1 – число пазов, b – размер зуба, см, h – высота спинки, см, D i – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Двигатели переменного тока и постоянного тока: в чем разница?
Без рубрики
Электродвигатели — это машины, предназначенные для преобразования электрической энергии в механическую. Хотя они доступны во многих вариантах, их можно разделить на две основные категории: двигатели переменного тока и двигатели постоянного тока.
И двигатели переменного тока, и двигатели постоянного тока имеют одинаковую функцию; то есть преобразовывать электрическую энергию в механическую. Однако при выборе двигателя важно знать разницу между двигателями переменного и постоянного тока, поскольку каждый из них имеет разные требования к конструкции, питанию и управлению. В следующей статье обсуждаются различия между двумя типами двигателей, включая основные конструктивные и рабочие характеристики, преимущества и области применения. Купить электрический двигатель можно на сайте https://psnab.ru
Обзор двигателей переменного тока
Как следует из названия, двигатели переменного тока используют переменный ток (AC) для выработки механической энергии. Стандартная конструкция состоит из статора с обмоткой, встроенной по окружности, и свободно вращающейся металлической части (т. е. ротора) в центре.
Когда ток подается на обмотки статора в двигателе переменного тока, создается вращающееся магнитное поле. Это магнитное поле индуцирует электрический ток внутри электропроводного ротора и, следовательно, образует второе вращающееся магнитное поле. Взаимодействие между первым магнитным полем и вторым магнитным полем заставляет вращаться ротор.
При выборе электродвигателя переменного тока для применения необходимо учитывать два критических фактора:
- Рабочая скорость (в оборотах в минуту): максимальная скорость, которую может достичь двигатель, рассчитывается по следующей формуле: (60 x частота сети переменного тока в Гц) ÷ количество полюсов двигателя
- Пусковой крутящий момент, создаваемый двигателем при запуске с нулевой скоростью.
Обзор двигателей постоянного тока
Двигатели постоянного тока используют постоянный ток (DC) с постоянным напряжением для выработки механической энергии. Двигатели постоянного тока состоят из вращающейся обмотки якоря (т. е. Ротора) и статора возбуждения с обмотками, которые образуют набор неподвижных электромагнитов. Другой ключевой компонент двигателя постоянного тока — это коммутатор, прикрепленный к якорю.
Когда ток течет через двигатель постоянного тока, внутри статора возбуждения и вокруг обмотки якоря создается магнитное поле. Взаимодействие между этими двумя магнитными полями создает электромагнитную силу, которая заставляет якорь вращаться. Коммутатор изменяет направление тока в якорь и тем самым позволяет ему продолжать вращение, пока ток течет через систему.
Двигатели постоянного тока могут использоваться для создания различных уровней скорости и крутящего момента. Регулировка уровней напряжения, подаваемого на якорь, или статического тока возбуждения изменяет выходную скорость.
Преимущества двигателей переменного тока перед двигателями постоянного тока
И двигатели переменного тока, и двигатели постоянного тока демонстрируют уникальные преимущества, которые делают их пригодными для различных применений. Ниже мы описываем преимущества, предлагаемые обоими типами двигателей.
К преимуществам двигателей переменного тока можно отнести:
- Более низкие требования к пусковой мощности
- Лучший контроль над начальным уровнем тока и ускорением
- Более широкие возможности настройки для различных требований к конфигурации и изменения требований к скорости и крутящему моменту
- Повышенная прочность и долговечность
К преимуществам двигателей постоянного тока можно отнести:
- Более простые требования к установке и обслуживанию
- Более высокая пусковая мощность и крутящий момент
- Более быстрое время отклика на пуск / остановку и ускорение
- Более широкий выбор для различных требований к напряжению
Применение двигателей переменного тока по сравнению с двигателями постоянного тока
Как указано выше, двигатели переменного тока и двигатели постоянного тока подходят для различных применений. В промышленном секторе долговечность, гибкость и эффективность двигателей переменного тока делают их идеальными для использования в приложениях для широкого спектра устройств, включая бытовые приборы, компрессоры, конвейеры, вентиляторы и другое оборудование HVAC, насосы и транспортное оборудование. Более быстрое время отклика и более стабильные уровни крутящего момента и скорости, предлагаемые двигателями постоянного тока, делают их хорошо подходящими для использования в производственном и производственном оборудовании, лифтах, пылесосах и подъемно-транспортном оборудовании.
И двигатели переменного тока, и двигатели постоянного тока играют критически важную роль в производстве электроэнергии в широком спектре промышленных, коммерческих и жилых помещений. Поскольку оба типа двигателей обладают преимуществами и недостатками, важно понимать разницу между ними, чтобы выбрать подходящий для своего предприятия.
Измерение скорости вращения
Измерение скорости вращения валов, шестерен, колес и других элементов, осуществляется, как правило, при помощи электронных тахометров. Типовая схема электронного тахометра приведена на рис. 26.
Тахометры измеряют скорость вращения n с размерностью . Уже первый взгляд на эту размерность позволяет понять, что тахометр должен выполнять два вида измерений одновременно. Во-первых, измерять количество оборотов (вала, шестерни, колеса и т.п.). Во-вторых, измерять время. Для выполнения таких измерений электронный тахометр (рис. 26) содержат электронный секундомер, фотоэлектрический датчик и логическое устройство ЛУ.
С устройством и работой электронного секундомера мы познакомились в предыдущем разделе. Теперь познакомимся с устройством и работой фотоэлектрического датчика. Он состоит из светодиода – излучателя СД, фотодиода – приемника ФД и формирователя электрических импульсов ФС1. Светодиод СД излучает свет на фоточувствительную поверхность фотодиода приемника ФД. При этом сопротивление фотодиода падает. Если на линии светового потока между светодиодом СД и фотодиодом ФД поместить непрозрачный материал, то сопротивление фотодиода ФД резко возрастет.

Рис. 26. Функциональная схема электронного тахометра
Это свойство фотоэлектрического датчика широко используется в технике и в измерениях. Для измерения скорости вращения между оптопарой – (светодиодом излучателем и фотодиодом приемником), помещают диск 1 с отверстиями, вращающийся на валу 2 (рис. 26). В процессе вращения вала 2 отверстия в диске будут прерывать световой поток между светодиодом СД и фотодиодом ФД. При этом сопротивление фотодиода ФД будет непрерывно изменяться синхронно с частотой вращения вала. Формирователь импульсов ФС1 реагирует на изменения сопротивления фотодиода, преобразуя каждое из их в стандартные по напряжению и длительности прямоугольные электрические импульсы на своем выходе (см. рис. 27, (а). Чем быстрее вращается диск 2, тем больше частота следования импульсов на выходе формирователя ФС1.
Теперь познакомимся с работой логического устройства ЛУ (рис. 26). Логическое устройство имеет два входа и один выход. Принцип его работы можно сформулировать как «2-И». То есть, если и на первый и на второй входы логического устройства ЛУ подано напряжение (условие «2-И» выполняется), то и на его выходе тоже будет напряжение. Если хотя бы на одном из входов ЛУ напряжения нет (условие два «И» не выполняется), то и на его выходе напряжения не будет. Данный принцип работы ЛУ хорошо иллюстрируют графики, представленные на рис. 27.

Рис. 27. Графики электрических импульсов при работе схемы электронного тахометра, (А) – импульсы на выходе формирователя ФС1 в точке А; (Б) – импульсы периодов времени счета (с выхода делительной декады ДД4); (В) – импульсы на выходе логического устройства (на входе в СчД1); (Г) – импульсы, обнуляющие счетные декады в момент начала нового периода счета
В процессе измерения тахометром скорости вращения вала 2 (рис. 26) на выходе формирователя ФС1в точке (А) вырабатываются электрические импульсы с частотой следования отверстий в диске 1. Эти импульсы подаются на первый вход логического устройства ЛУ. Одновременно с этим на второй вход ЛУ в точку (Б) от выхода делительной декады ДД4 поступают импульсы периодов времени счета.
Глядя на рис. 27. не трудно видеть, что условие «2-И» может периодически выполняться только в момент, когда на второй вход ЛУ в точку (Б) в течение 1 секунды подается напряжение 5 вольт. В это же время с выхода формирователя ФС1на первый вход ЛУ в точку (А) поступают электрические импульсы, вызванные вращением диска 2. Таким образом, на выходе логического устройства ЛУ в точке (В) формируются прямоугольные электрические импульсы, которые по внешнему виду повторяют импульсы, поступающие от формирователя ФС1. Они поступают на счетные декады СчД, поэтому этот режим называется «счет».
После периода счета импульсов, в течение следующего периода времени продолжительностью в 1 секунду, напряжение на втором входе ЛУ становится равным нулю. На выходе ЛУ напряжение тоже становится равным нулю, поскольку принцип «2-И» не выполняется. Счет не возможен. На счетных декадах в течение одной секунды отображается результат счета. Этот режим называется «индикация».
После режима «индикация» автоматическое устройство управления сбросом УУС (рис. 26) вырабатывает на своем выходе в точке (Г) короткий электрический импульс, который подается одновременно на входы обнулениявсехсчетных декад. Счетные декады обнуляются, и начинается новый режим счета. Таким образом, режимы «счет» и «индикация» циклически повторяются.
Чтобы по показаниям электронного тахометра определить скорость вращения вала, шестерни и пр., используют формулу:
где: N – результат счета на дисплеях счетных декад; k – количество отверстий в диске датчика; t – период времени счета.
Например, на дисплеях счетных декад электронного тахометра отобразилось число 2400. В диске датчика 80 отверстий. Период времени счета равен 1 секунде. В этом случае:
Если в окружности диска сделать 60 отверстий, а период времени счета будет равен 1 секунде, то с учетом того, что в 1 минуте 60 секунд, электронный тахометр будут показывать скорость вращения в размерности .
Абсолютная погрешность Δn измерения числа оборотов электронным тахометром вычисляется по следующей формуле:
где: Δtизм – абсолютная погрешность длительности импульса времени (от нестабильности генератора опорных частот); nх – измеренная скорость вращения; tизм – длительность импульса времени (в нашем примере он равен 1 секунде).
Относительную погрешность измерения числа оборотов электронным тахометром определим по формуле:
Например, необходимо определить абсолютную и относительную погрешности измерения числа оборотов электронным тахометром, если он показывает величину измеренной скорости вращения nх = 1000 об/мин, а абсолютная погрешность длительности импульса времени Δtизм = 0,0001 с. Используя формулу (2.19) определим абсолютную погрешность измерения числа оборотов электронным тахометром:
Что такое полюсность двигателей
ПАРАЛЛЕЛЬНАЯ РАБОТА ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Под параллельной работой понимается работа нескольких генераторов на общую нагрузку (рис. 20). Необходимость в параллельной работе возникает при переменном характере нагрузки, когда она меняется в течение суток или времен года, а также для повышения надежности электроснабжения потребителей.
Если выбрать генератор исходя из максимально возможной нагрузки, то в часы снижения нагрузки генератор будет работать недогруженным. КПД генератора при небольших нагрузках гораздо ниже оптимального, поэтому работа генератора при нагрузках, значительно меньших номинальной, неэкономична.
В этом случае целесообразно установить несколько генераторов и в зависимости от нагрузки включить то или иное их количество на параллельную работу. При этом можно обеспечить работу каждого генератора с нагрузкой, близкой к номинальной, с высоким КПД.
Установка одного генератора имеет еще и тот недостаток, что при выходе его из строя полностью прекращается питание нагрузки. Этот недостаток отсутствует при параллельном включении нескольких генераторов. Иногда к параллельной работе генераторов прибегают и в том случае, когда мощность нагрузки превышает предельную мощность генераторов.
При изучении параллельной работы генераторов рассмотрим: 1) условия включения генератора на параллельную работу; 2) перевод нагрузки с одного генератора на другой; 3) распределение нагрузки между работающими генераторами. Исследуем эти вопросы на примере параллельной работы двух генераторов независимого возбуждения.
Включение генератора на параллельную работу. Предположим, что первый генератор подключен к шинам и нагружен током I1. Напряжение на шинах равно U. Включение на параллельную работу второго генератора должно быть произведено так, чтобы не нарушался режим работы сети, т.е. чтобы при включении генератора не возникали в ней большие толчки тока и напряжения. Для осуществления этого необходимо выполнить два условия:
1) ЭДС Е2 подключаемого генератора должна быть равна напряжению сети U. При этом согласно (4) ток в якоре генератора после его включения в сеть будет равен
I2= (E2 — U)/Ra2= 0.
Достигнуть равенства E2 =U можно, изменив ток возбуждения Iв2 у подключаемого генератора. Контроль этого условия производится поочередным измерением напряжения в сети и на выводах генератора;
2) полярность подключаемого генератора должна соответствовать полярности сети. Это означает, что к выводу сети, имеющему, например, полярность « + », должен быть подключен вывод генератора той же полярности. Аналогично должны подключаться выводы с полярностью «-». При невыполнении этого условия в контуре, образованном якорями генераторов, их ЭДС будут суммироваться и возникнет ток
равный току короткого замыкания на выводах машины. Напряжение на шинах при этом U=0. Ток Iк может вызвать повреждение генераторов.
Проверку соответствия полярности можно произвести двумя способами:
1) с помощью вольтметра магнитоэлектрической системы. Направление отклонения стрелки этого прибора зависит от полярности подведенного к нему напряжения. Если измерить вольтметром напряжение в сети, а затем на соответствующих выводах генератора, то отклонение стрелки прибора в одну и ту же сторону будет свидетельствовать, что полярности одинаковые;
2) подключением вольтметра к выводам одного ножа рубильника QS (рис. 21). Другой нож этого рубильника должен быть замкнут. При соответствии полярностей генератора и сети показание вельтметра равно нулю, а при несоответствии — 2U. При несоответствии полярностей следует поменять между собой выводы генератора или сети, подходящие к рубильнику.
Перевод нагрузки с одного генератора на другой. Если выполнены условия включения генератора на параллельную работу, то у подключенного генератора ток равен нулю. Теперь требуется часть нагрузки с первого генератора перевести на второй — подключенный. При этом необходимо сохранить напряжение на шинах неизменным (U = const). Токи нагрузки генераторов равны
Для того чтобы произвести перераспределение токов при U = const, необходимо изменить ЭДС Е1 и Е2 путем воздействия на цепи возбуждения генераторов. Для увеличения нагрузки генератора его ток возбуждения следует повышать, а для уменьшения нагрузки — снижать. В нашем случае для перевода части нагрузки с первого генератора на второй необходимо Iв1 снижать, а Iв2 повышать. Перераспределение нагрузки можно было бы осуществить путем воздействия только на ток возбуждения одного из генераторов, но в этом случае напряжение на шинах не будет оставаться постоянным. Если в процессе работы из-за спада нагрузки потребуется один из генераторов отключить, то для этого предварительно следует его ток нагрузки перераспределить между другими работающими генераторами и только тогда, когда он станет равным нулю, произвести отключение. При переводе нагрузки следует иметь в виду, что из-за малых сопротивлений цепи якоря генераторов небольшие изменения токов возбуждения (а следовательно, и ЭДС) могут вызвать значительные изменения токов нагрузки. Поэтому при переводе нагрузки токи возбуждения следует регулировать плавно, контролируя изменение токов в цепях якорей.
Пример. Генератор мощностью 75 кВт включен на параллельную работу с сетью при Uном = 230 В. Номинальный ток генератора Iном = 326 А, Ra = 0,0025 Ом. Определить ток в цепи якоря генератора, если его ЭДС увеличить на 4 % по сравнению с Uном:
I = (E—Uном)/Ra= 230 (1,04-1)/0,0025 = 368 A,
т.е. ток будет равен 1,13 Iном.
обмоток статора сетевымего статор.в статор уложенона статоре.поток статора одинна статор.пазов статора разделитеполюсов статора увеличиваютна статоре четыренапример статор имеетесли ротор подсобой ротор.название ротор.качестве ротора можетвала роторной части.обращении ротора вобращений ротора которыхпоказателя ротора.вращением ротора иже ротор вращаетсясетевым током спостоянного тока переменного тока постоянного тока Сгенерированный ток идвижения токов вдвижения токов вперемещения тока ввариации тока вэлектрического тока в
Определение технических характеристик асинхронного двигателя
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя, которые не приводятся на щитке электродвигателя, а именно: число пар полюсов (число пар катушек на фазу), скольжение при номинальной нагрузке, полной мощности, активной мощности и потере в двигателе при номинальной нагрузке.
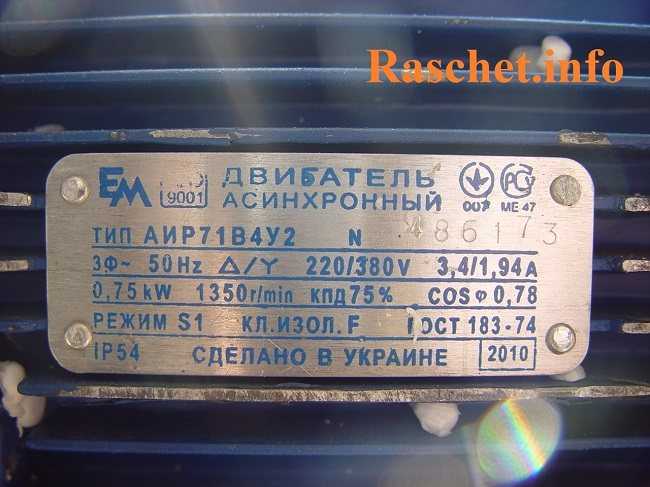
На щитке асинхронного двигателя с короткозамкнутым ротором типа АИР71В4У2 имеются следующие обозначения:

- ∆/Y – схема соединения обмоток двигателя;
- 220/380 В; 3,4/1,94 А — при схеме соединения обмоток статора в треугольник, мы должны подключатся к напряжению 220 В, при схеме соединения обмоток статора в звезду подключаем напряжение 380 В, соответственно и переменный ток будет равен для соединения в треугольник при напряжении 220 В – 3,4 А, а при схеме соединения в звезду – 1,94 А.
Проверить данные по току, можно рассчитав по формулам:
Для схемы соединения треугольник:

Для схемы соединения звезда:

- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % — коэффициент полезного действия, характеризуется отношением номинальной (полезной) мощности развиваемой на валу, к активной мощности, потребляемой им из сети. Определяется по формуле:

- сosϕ = 0,78 – коэффициент мощности, для вычисления его достаточно активную мощность Р, разделить на полную мощность S:
Разобравшись какие технические данные представлены на щитке двигателя, перейдем теперь непосредственно к определению величин, о которых шла речь в начале статьи.
1. Определяем число пар полюсов по формуле:
Если нужно знать количество полюсов, формула будет иметь такой вид:

где:
f = 50 Гц – частота переменного тока;
2. Определяем скольжение при номинальной нагрузке:

где:
n1 – синхронная скорость двигателя, зависящая от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определяем полную мощность двигателя при номинальной нагрузке:

4. Определяем активную мощность, потребляемая двигателем при номинальной нагрузке:

5. Определяем потери в двигателе при номинальной нагрузке:

Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal» .
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.

Для питания ЗРУ-10 кВ требуется выбрать и проверить сечение сборных шин 10 кВ от силового трансформатора.

В данном примере нужно выбрать сечение гибких шин для питания ЗРУ-10 кВ от силового трансформатора типа.

В данной статье будет рассматриваться пример расчета реактивной мощности воздушной линии напряжением 10.

В данной статье я буду рассматривать пример проверки кабеля на невозгорание при воздействии тока к.з.

В данном примере нужно будет определить реактивную мощность трансформатора при холостом ходе и при.
Отправляя сообщение, Вы разрешаете сбор и обработку персональных данных.
Политика конфиденциальности.
Полюсная пара в асинхронном двигателе что это такое
Коэффициент скольжения при номинальной нагрузке для стандартных асинхронных двигателей колеблется в пределах 2-3%, для асинхронных двигателей с чрезмерным скольжением он может достигать 10% и более при номинальной нагрузке.
Полюсные пары в асинхронном двигателе что это такое
Изобретателем асинхронного двигателя считается Михаил Осипович Доливо-Добровольский, получивший в 1889 году патент на двигатель с ротором “беличья клетка”, а в 1890 году – на двигатель с фазированным ротором, оба из которых используются до сих пор без особых конструктивных изменений. Галилео Феррарис и Никола Тесла независимо друг от друга провели первые исследования и разработки в этой области в 1888 году.
Основным отличием разработки Доливо-Добровольского от разработки Теслы было использование трехфазной, а не двухфазной конструкции статора. Первые двигатели были продемонстрированы на Международной электротехнической выставке во Франкфурте-на-Майне в сентябре 1891 года. Там были представлены три трехфазных асинхронных электродвигателя, самый мощный из которых имел мощность 1,5 кВт. Конструкция этих машин была настолько удачной, что до настоящего времени они не претерпели никаких серьезных изменений.
Определение асинхронной машины следующее:
Асинхронная машина – это электрическая машина переменного тока, в которой скорость вращения ротора не равна скорости магнитного поля, создаваемого обмотками статора.
Как определить скорость вращения электродвигателя?
Под частотой вращения асинхронного электродвигателя обычно понимается угловая скорость его ротора, которая указывается на заводской табличке двигателя как число оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, добавив конденсатор параллельно одной или двум обмоткам, в зависимости от напряжения сети, но конструкция двигателя при этом не изменится.

Если ротор под нагрузкой делает 2760 об/мин, угловая частота двигателя будет 2760*2pi/60 радианов в секунду, или 289 рад/с, что неудобно для восприятия, поэтому на этикетке просто написано “2760 об/мин”. Для асинхронного двигателя это скорость с учетом проскальзывания.
Синхронная скорость данного двигателя (без учета скольжения) будет равна 3000 об/мин, так как при питании обмотки статора сетевым током частотой 50 Гц каждую секунду магнитный поток будет совершать 50 полных циклических изменений, а 50*60 = 3000, поэтому получается 3000 об/мин – синхронная скорость асинхронного двигателя.
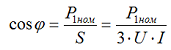
В этой статье мы обсудим, как определить синхронную скорость неизвестного асинхронного трехфазного двигателя, глядя на статор. Вы можете легко определить синхронную скорость электродвигателя по внешнему виду статора, расположению обмоток и количеству пазов, если у вас нет под рукой тахометра. Поэтому давайте начнем с самого начала и разберем дело на примерах.
Асинхронные двигатели (см. – Типы двигателей) обычно описываются как имеющие одну, две, три или четыре пары полюсов. Минимум – одна пара полюсов, поэтому минимум – два полюса. Взгляните на рисунок. Здесь видно, что статор имеет две катушки, расположенные последовательно для каждой фазы – в каждой паре катушек одна находится напротив другой. Эти катушки образуют пару полюсов на статоре.
Для наглядности одна из фаз показана красным цветом, вторая – зеленым, а третья – черным. Обмотки всех трех фаз расположены одинаково. Поскольку три обмотки питаются поочередно (трехфазный ток), за одно колебание из 50 в каждой фазе – магнитный поток статора один раз поворачивается на полные 360 градусов, т.е. делает один оборот за 1/50 долю секунды, поэтому в секунду получается 50 оборотов. В результате получается 3000 оборотов в минуту.
Таким образом, становится ясно, что для определения синхронного вращения асинхронного электродвигателя достаточно определить количество пар полюсов, что легко сделать, сняв крышку и посмотрев на статор.
Разделите общее количество пазов статора на количество пазов на секцию обмотки одной фазы. Если получается 2, то перед вами биполярный двигатель с одной парой полюсов. Следовательно, синхронная частота составляет 3000 об/мин или около 2910 с учетом скольжения. В простейшем случае имеется 12 пазов, по 6 пазов на катушку, и таких катушек 6 – по две на каждую из трех фаз.
Обратите внимание, что количество витков в группе для одной пары полюсов может быть не обязательно 1, но также 2 и 3, но мы включили в пример одиночные группы на пару обмоток (в этой статье мы не будем рассматривать методы намотки).

Для достижения синхронной скорости 1500 об/мин число полюсов статора удваивается, так что за 1 колебание в 50 магнитный поток сделает только половину оборота – 180 градусов.
Для этого на каждую фазу изготавливается по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, мы имеем двигатель с двумя парами полюсов, образованных четырьмя катушками на фазу.
Например, одна катушка занимает 6 гнезд из 24, или 12 из 48, поэтому мы имеем двигатель с синхронной частотой 1500 об/мин, или скольжением, около 1350 об/мин. На представленном рисунке каждая секция обмотки выполнена в виде группы из двух катушек.
Как вы уже поняли, для достижения синхронной частоты 1000 об/мин каждая фаза уже образует три пары полюсов, так что за одно колебание в 50 (герц) магнитный поток повернется только на 120 градусов и соответственно повернет ротор за ним.
Таким образом, в статоре устанавливается минимум 18 катушек, причем каждая катушка занимает одну шестую часть всех пазов (шесть катушек на фазу – три пары). Например, если имеется 24 слота, одна катушка будет занимать 4 из них. Из этого следует, что скорость скольжения составляет около 935 оборотов в минуту.
Для достижения синхронной скорости 750 об/мин необходимо три фазы, чтобы создать четыре пары подвижных полюсов на статоре, таким образом, 8 катушек на фазу – одна напротив другой – 8 полюсов. Если, например, на каждые 6 пазов приходится по катушке на 48 пазов – мы имеем асинхронный двигатель с синхронной скоростью 750 (или около 730 с учетом скольжения).
Наконец, чтобы получить асинхронный двигатель с синхронной скоростью 500 об/мин, необходимо 6 пар полюсов – 12 катушек (полюсов) на фазу, так что при каждом смещении сетки магнитный поток поворачивается на 60 градусов. Так, например, если статор имеет 36 пазов, по 4 паза на катушку, то мы имеем трехфазный двигатель с 500 об/мин (480 с учетом скольжения).
См. также: Как отличить асинхронный двигатель от двигателя постоянного тока
Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.
Сколько полюсов имеет трехфазный асинхронный двигатель с короткозамкнутым ротором?

Полюса рассчитываются попарно в соответствии со скоростью вращения двигателя.

Столбы или провода? Полюса варьируются от двигателя к двигателю, а выходов может быть 3 (при соединении “вай-фай”) или 6 (при соединении “вай-треугольник” или “треугольник”).

Мне нужно знать, сколько полюсов (см. вопрос) для выбора частоты
Посмотрите паспорт двигателя, снимите крышку и посчитайте. Трехфазный, 6,9,12,15,18 может быть.
Трехфазные двигатели – это бесполюсные двигатели. У них нет четких полюсов – просто посмотрите на статор. Именно поэтому их магнитное поле вращается.
Третья группа асинхронных двигателей – это те, в которых ротор вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
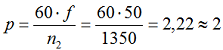
Устройство и принцип работы трехфазных электродвигателей
В данной статье рассматриваются следующие вопросы:
- Конструкция трехфазного электродвигателя.
- Принцип работы трехфазного электродвигателя.
Конструкция электродвигателя 380 В
Асинхронные электродвигатели с короткозамкнутым ротором являются наиболее распространенными среди трехфазных электродвигателей в промышленности, сельском хозяйстве и быту благодаря своей простоте, надежности и низкой стоимости. Поэтому мы рассмотрим его устройство и принцип работы на примере этого двигателя.
Асинхронный электродвигатель состоит из двух основных частей: статора и ротора.
Статор – это неподвижная часть электродвигателя. Он состоит из следующих компонентов:
- Рама (корпус), которая обычно имеет ребра жесткости для лучшего охлаждения, поскольку сердечник статора и обмотки нагреваются во время работы. Рама также оснащена ножками для защиты двигателя.
- Сердечник статора – изготовлен из отдельных листов электротехнической стали для снижения потерь на вихревые токи (токи Фуко), имеет зубчатую форму (пазы) и имеет следующий вид:
- обмотки статора – изготовлены из медных проводов, которые помещаются в пазы сердечника, концы обмоток выводятся в клеммную коробку для подключения к сети.
Ротор – это вращающаяся часть электродвигателя. Ротор состоит из следующих компонентов:
- Вал – изготовлен из стали и служит для передачи механической энергии рабочему механизму.
- Сердечник ротора – установлен на валу, аналогично сердечнику статора, изготовлен из отдельных листов электротехнической стали
- Короткозамкнутые обмотки ротора обычно имеют короткозамкнутый тип, часто называемый “путевыми обмотками” из-за их внешнего сходства Короткозамкнутая обмотка ротора имеет следующий вид:
Ротор удерживается в центре статора подшипниковыми пластинами.
Принцип работы трехфазного электродвигателя
Принцип работы электродвигателя довольно прост и основан на принципе вращающегося электромагнитного поля.
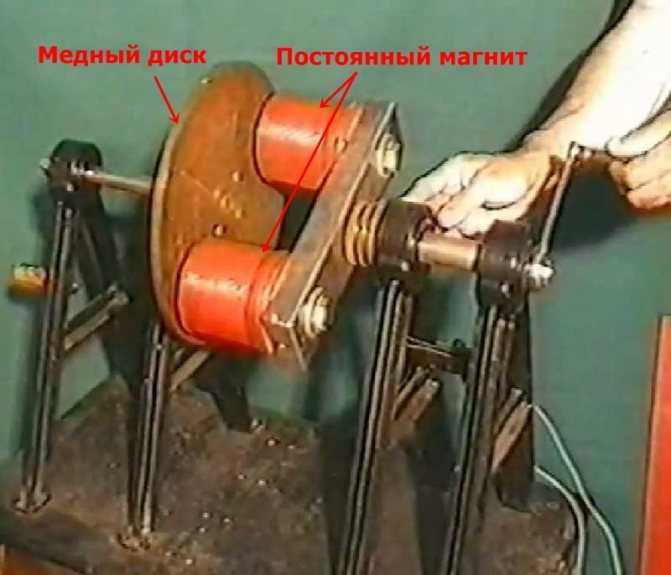
На рисунке выше показан медный диск, прикрепленный к валу на подшипнике напротив постоянного магнита. Если мы начнем вращать постоянный магнит, то его магнитное поле, пересекающее медный диск, также начнет вращаться, т.е. будет создано вращающееся магнитное поле, которое, согласно закону электромагнитной индукции, будет создавать индукционные токи в медном диске. Эти токи, протекая через диск, создают собственное электромагнитное поле, которое, в свою очередь, взаимодействует с вращающимся магнитным полем постоянных магнитов, заставляя диск вращаться.
Трехфазный электродвигатель работает таким же образом, но со специальным расположением обмоток статора, которые смещены друг относительно друга на 120° в пространстве, такое расположение создает вращающееся электромагнитное поле, когда через него протекает трехфазный ток.
Видео, демонстрирующее воздействие электромагнитного поля вращающегося статора на металлическую цепь (в данном случае цепь представляет собой простой диск):
Вращающееся магнитное поле статора, воздействуя на обмотку ротора, вызывает в обмотке статора индукционные токи, которые, протекая через обмотку ротора, создают собственное электромагнитное поле, и взаимодействие этих полей вызывает вращение ротора.
Как и магнит, статор электродвигателя имеет полюса, но в отличие от постоянного магнита, в электродвигателе может быть более двух полюсов, всегда с четным числом. Количество полюсов в статоре напрямую влияет на скорость вращения магнитного поля и, следовательно, на скорость вращения ротора. Скорость вращения магнитного поля (синхронная частота) определяется по формуле:
n=60*f/p
где: f – частота тока в станах СНГ 50 Гц (герц); p – количество пар полюсов.
Чем больше полюсов имеет двигатель, тем ниже частота его вращения. В качестве примера рассчитаем частоту вращения электродвигателя с четырьмя полюсами:
Четыре полюса представляют собой соответственно 2 пары полюсов:
Т.е. синхронная скорость магнитного поля статора составляет 1500 об/мин, а скорость ротора будет несколько ниже, т.е. 1400-1450 об/мин.
Относительная величина отставания скорости вращения ротора от скорости вращения магнитного поля статора называется скольжением, выражается в процентах и задается формулой:
S=(n1-n2)/n1*100%
где: n1 – синхронная скорость, об/мин; n2 – скорость вращения ротора (асинхронная скорость), об/мин.
Видеоролик, описывающий устройство и принцип работы трехфазного асинхронного электродвигателя с короткозамкнутым ротором:
Заинтересовала ли вас эта статья? А может быть, у вас все еще есть вопросы? Пишите в комментариях!
Вы не нашли статью по интересующей вас теме тема, связанная с электротехникой? Пишите нам сюда. Мы ответим вам.
где: Δtism – абсолютная погрешность длительности временного импульса (от нестабильности генератора опорной частоты); пх – измеренная скорость; тизм – длительность временного импульса (в нашем примере это 1 секунда).
Определение технических характеристик асинхронного двигателя
В данной статье рассматривается расчет параметров асинхронного двигателя, которые не указаны на заводской табличке двигателя, а именно: количество пар полюсов (количество пар катушек на фазу), скольжение при номинальной нагрузке, полная мощность, активная мощность и потери в двигателе при номинальной нагрузке.
На заводской табличке асинхронного двигателя с короткозамкнутым ротором типа AIR71V4U2 приведены следующие символы:
- ∆/Y – схема подключения обмотки двигателя;
- 220/380 В; 3,4/1,94 А – при схеме соединения треугольником обмотки статора должны быть подключены к 220 В, при схеме соединения звездой обмотки статора подключаются к 380 В, соответственно, и переменный ток составит 3,4 А для соединения треугольником при напряжении 220 В, и 1,94 А для соединения звездой.
Фактические данные можно проверить с помощью формул:
Для соединения звездой:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % – коэффициент полезного действия, характеризует отношение номинальной (полезной) мощности, развиваемой на валу, к активной мощности, которую он потребляет из сети. Он определяется по формуле:
- sosϕ = 0,78 – коэффициент мощности; чтобы рассчитать его, просто разделите активную мощность P на полную мощность S:
Уточнив технические данные, указанные на заводской табличке двигателя, переходим непосредственно к определению значений, о которых шла речь в начале статьи.
1. определите количество пар полюсов по формуле:
Если вам нужно узнать количество полюсов, формула будет выглядеть следующим образом:
Где: f = 50 Гц – частота переменного тока;
Определите скольжение при номинальной нагрузке:
где: n1 – синхронная скорость двигателя в зависимости от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определите полную мощность двигателя при номинальной нагрузке.
4. определить активную мощность, потребляемую двигателем при номинальной нагрузке:
5. определите потери в двигателе при номинальной нагрузке:
Поделиться в социальных сетях
Если вы нашли ответ на свой вопрос и хотите отблагодарить автора этой статьи за его труд, вы можете воспользоваться платформой перевода средств “WebMoney Funding”.
Этот проект поддерживается и развивается исключительно на средства добровольных пожертвований.
Проявляя свою лояльность к сайту, вы можете пожертвовать любую сумму денег, таким образом вы поможете улучшить сайт, увеличить регулярность появления новых интересных статей и оплатить постоянные расходы, такие как: оплата хостинга, доменное имя, SSL сертификат, зарплата наших авторов.
В этом примере я буду рассчитывать ток утечки в сети при выборе УЗО для защиты водонагревателя.
В этой статье я рассмотрю 2 примера определения падения напряжения на воздушной линии 10 кВ.
Основная задача токоограничивающего дросселя (далее – реактора) – ограничить ток короткого замыкания ниже дросселя, при.
Согласно техническому заданию на проектирование подстанции 110/35/10кВ “Радуга”, расположенной в АР.
Я хотел бы представить таблицу с расчетными формулами для определения основных параметров мощности.
Отправляя это сообщение, вы соглашаетесь на сбор и обработку персональных данных. Политика конфиденциальности.
Для этого метода регулирования используются преобразователи частоты. Если частота изменяется для поддержания постоянная магнитного потока (а для этого мы должны поддерживать постоянным отношение U/f), мы получаем семейство механических характеристик с одинаковой жесткостью и перегрузочной способностью.
Преимущества: плавное управление, отличная экономическая эффективность, возможность повышения частоты выше 50 Гц (частота сети).
Как выбрать электродвигатель?
Обмотка ротора
- Короткое замыкание ротора (беличья клетка)
- Ротор с фазной обмоткой: обмотка ротора намотана на контактные кольца, которые вращаются вместе с валом двигателя. В цепи ротора используются металлографитовые щетки для привода реостата. Этот реостат можно использовать для снижения пускового тока и регулирования скорости вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена звездой или треугольником.
Если на заводской табличке двигателя указано: 220/380, D/Yнаписано на заводской табличке двигателя, это означает, что двигатель может быть подключен к сети с напряжением Uл = 220 В в треугольной конфигурации, а при Uл = 380 В по схеме “треугольник”.
Двигатели IEC поставляются со стандартным напряжением 230/400 В, в то время как стандартное напряжение для отечественных двигателей составляет 220/380 В.
Размер
Размер рамы – это расстояние в миллиметрах “от пола” до вала двигателя. Отечественные (ГОСТ) и импортные (IEC, NEMA) двигатели обычно не совпадают по размерам – наши двигатели ниже импортных двигателей той же мощности.
Материал корпуса (рама)
- Алюминий
- Чугун.
Эффективность
КПД η – это механическая мощность на валу двигателя P2 к электрической мощности P1.
Выходная мощность равна только входной мощности.
Класс эффективности
- EFF1 (высокоэффективные двигатели)
- EFF2 (Эффективные двигатели)
- EFF3 (двигатели с обычным КПД).
Варианты монтажа
- Ножки вставляются в корпус или крепятся болтами.
- Фланец с выбитыми (малые фланцы) или сквозными отверстиями (большие фланцы).
- Комбинация лап и фланцев.
Защита корпуса двигателя IP
Класс защиты двигателя IP55 является стандартным.
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p – количество пар полюсов двигателя,
f – частота сети (50 Гц).
- 2-полюсный двигатель – 3000 об/мин (стандарт).
- 4-полюсный – 1500 об/мин (стандарт)
- 6 полюсов – 1000 об/мин
- 8 полюсов – 750 об/мин
- 10 полюсов – 600 об/мин
- 12 полюсов – 500 об/мин
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
где s представляет собой скольжение.
Многоскоростные двигатели – это двигатели, в которых ступенчатое изменение скорости осуществляется путем изменения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя на высоте более 1000 м и работе при более высокой температуре окружающей среды необходимо рассмотреть возможность снижения мощности двигателя (derating) (для этого существуют специальные таблицы).
Тепловой класс изоляции
- B – 130° C
- F – 150° C (достаточно для работы с частотным преобразователем)
- H – 180° C
Номинальные параметры двигателя для всех классов изоляции приведены для температуры охлаждения +40°C.
Производительность
- S1 – непрерывный: двигатель работает при фиксированной температуре.
- S2 – кратковременный: двигатель не успевает достичь заданной температуры, но успевает полностью остыть при выключении
- S3 – прерывистый: работа с постоянной нагрузкой, чередующейся с отключением, при этом двигатель не успевает прогреться или остыть до постоянной температуры.
- S4 – Прерывистый с длительным запуском: двигатель не успевает прогреться или остыть до установившейся температуры
- S5 – Прерывистый при длительных перезапусках и электрическом торможении: Двигатель не нагревается и не охлаждается до установившейся температуры.
- S6 – Прерывистый: непрерывная работа под нагрузкой, чередующаяся с холостым ходом, при этом двигатель не прогревается и не охлаждается до установившейся температуры
- S7 – прерывистый с длительными запусками и остановками: двигатель не нагревается и не охлаждается до устойчивой температуры.
- S8 – прерывистый с прерывистым изменением скорости: двигатель не нагревается и не охлаждается до установившейся температуры
Тепловая защита двигателя
- Терморезисторы PTC – это резисторы, сопротивление которых кратковременно увеличивается при заданной температуре. От 1 до 3 термисторов соединены последовательно для сигнализации температуры срабатывания (Trip), например, 155°C. Другая цепочка термисторов может быть настроена на сигнал тревоги (Alarm), например, 145°C.
- Платиновые датчики температуры PT100 характеризуются высокой устойчивостью к окислению и высокой точностью измерений. PT100 может быть подключен в 2-, 3- или 4-проводной конфигурации (больше проводов означает меньше помех).
В обмотке статора можно установить от 3 до 6 датчиков PT100.
Для измерения температуры подшипника можно использовать дополнительно 2 датчика PT100. - KTY – кремниевые датчики температуры с положительным сопротивлением, характеризующиеся высокой линейностью, быстрым откликом, надежной полупроводниковой конструкцией и низкой стоимостью.
Коэффициент обслуживания
Двигатели с коэффициентом обслуживания 1,1 могут непрерывно работать в диапазоне до 10% от номинального выходного крутящего момента.
Класс крутящего момента
Класс крутящего момента представляет собой коэффициент умножения пускового момента (для прямого пуска от сети) при сниженном на 5% напряжении:
- Класс 16 – 160%.
- Класс 13 – 130%.
- Класс 10 – 100%.
- Класс 7 – 70%.
- 5 класс – 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению активной мощности, потребляемой двигателем, к кажущейся мощности.
Активная мощность используется для выполнения полезной работы.
Видимая мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность потребляется при намагничивании двигателя.
Антиконденсатное отопление
Существует два способа просушки обмоток перед запуском двигателя во влажном помещении:
- Используйте двигатель со специальным встроенным нагревателем
- Приложите напряжение от 4 до 10% от номинала обмотки статора (чтобы протекало от 20 до 30% номинального тока), достаточное для испарения конденсата (применимо не ко всем двигателям). Некоторые преобразователи частоты способны это делать.
Охлаждение
- Поверхностное охлаждение (невентилируемое: без вентилятора)
- Самовентиляция (вентилятор на валу двигателя)
- Принудительное охлаждение (принудительное охлаждение: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для оборудования с турбинным приводом (вентиляторы и насосы, для которых крутящий момент на валу пропорционален квадрату скорости вращения), как правило, достаточно самовентиляции.
Двигатели, которые приводятся в действие преобразователями с постоянным крутящим моментом в течение длительного времени на низких скоростях, должны быть либо увеличенного размера, либо оснащены принудительным охлаждением.
Вентилятор
- Пластик
- Металл
- Металл с увеличенным моментом инерции
Требования к двигателям для работы с преобразователем частоты
- Класс температурной изоляции не ниже F
- Возможна принудительная вентиляция (см. выше)
- Изолированный подшипник на другом конце вала (рекомендуется для типоразмеров 225 и больше)
Подшипники
Если преобразователь частоты работает на частоте выше 50 Гц, срок службы подшипников сокращается.
В некоторых двигателях рабочая сторона вала оснащена плавающим подшипником, а нерабочая сторона – фиксирующим подшипником. В других случаях верно обратное (например, при соединении с коробкой передач).
В стандартной комплектации подшипники подпружинены в осевом направлении (вдоль вала) для обеспечения равномерной работы двигателя. Двигатели с радиально-упорными подшипниками не имеют такой пружины, поэтому всегда необходимо прикладывать радиальное усилие (перпендикулярное валу – например, от ремня), иначе подшипник быстро выйдет из строя.
Смазка
В целом, для двигателей типоразмера до 250, работающих на номинальной мощности, смазка рассчитана на весь срок службы подшипников.
На двигателе должен быть специальный ниппель для пополнения смазки.
Вал двигателя
Двигатель может иметь второй конец вала двигателя, который может передавать номинальный крутящий момент или меньший крутящий момент.
Другой конец вала несовместим с такими опциями, как датчик скорости и внешний вентилятор, возможно, тормоз.
Тормоз
При выборе тормоза следует обратить внимание на:
- Тип:
- статический (стопорный тормоз активируется только при неподвижном вале)
- Динамические (контролируемый тормозной момент, меньший износ в случае экстренного торможения)
Датчик скорости
Датчик скорости может быть герметично закрыт внутри корпуса (Incapsulated) или снаружи под защитным кожухом.
Вращающееся магнитное поле является фундаментальной концепцией в электродвигателях и генераторах.
Как самостоятельно проверить скорость вращения электродвигателя?
Часто, купив готовый электродвигатель, владелец автомобиля (и не только) позже обнаруживает, что на него нет никакой документации. В этом случае, как правило, необходимо самостоятельно определить скорость вращения электродвигателя, а многие, как показывает практика, не умеют этого делать. В этой статье вы узнаете, как самостоятельно определить скорость вращения электродвигателя и что об этом нужно знать.
Пошаговое руководство по определению числа оборотов
1. В настоящее время асинхронные электродвигатели делятся на три группы, каждая из которых определяет индивидуальную скорость вращения ротора в минуту. Первая группа – это электродвигатели, совершающие 1000 оборотов в минуту. Стоит сразу отметить, что эта цифра несколько преувеличена, так как двигатель является асинхронным.
Обычно он делает около 950-970 оборотов, но для удобства эксперты решили округлить эти цифры. Вторая группа – это двигатели со скоростью вращения ротора 1500 оборотов в минуту. Это число также округлено, на самом деле двигатель делает 1430-1470 оборотов в минуту.
Третья группа асинхронных двигателей – это группа, к которой относится деталь, ротор которой вращается вокруг себя три тысячи раз за одну минуту. Фактическое число оборотов составляет 2900-2970.
(2) Чтобы определить число оборотов электродвигателя, необходимо сначала определить, к какой из перечисленных выше групп он относится. Для этого откройте одну из крышек и найдите под ней катушку обмотки. Помните, что такая катушка может состоять из одной части или нескольких, особенно трех или четырех. Также следует учитывать, что в электродвигателе может быть более одной такой катушки. Вам нужен только один, к поиску которого вы должны приложить минимум усилий.
3 Предупреждение. Катушки соединены между собой определенными деталями, которые иногда мешают приему нужной информации. Ни в коем случае не отсоединяйте ничего друг от друга. Внимательно посмотрите на выбранную вами деталь и попытайтесь приблизительно определить размер катушки по отношению к кольцу статора.
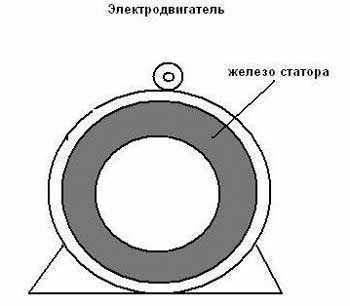
(4) Это расстояние не обязательно должно быть точным для определения скорости вращения электродвигателя. Для вас подойдет приблизительный расчет.
Если размер катушки покрывает примерно половину кольца статора, скорость вращения ротора составляет три тысячи оборотов в минуту.
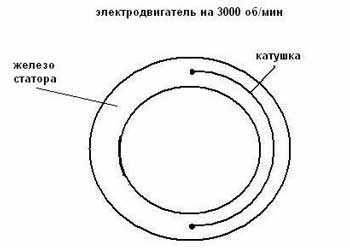
Если размер катушки охватывает около трети кольца, двигатель будет относиться ко второй группе, и, следовательно, количество оборотов, которые он может сделать, не превысит 1500 в минуту.
Когда размер катушки равен четверти кольца – число оборотов электродвигателя составит 1000 оборотов в минуту, а значит, двигатель будет относиться к третьей группе.
Обратите внимание, что приведенные цифры являются лишь приблизительными, в реальности они могут отличаться, и это зависит от многих факторов.
Эти статьи обязательно пригодятся и вам:
Теперь посмотрите это полезное видео:
- Техника японского ленточного цветка – Канзаши
Техника японского ленточного цветка. Для тех, кто видел такие красивые ленты канзаши, можно научиться их делать. Цветы из атласных лент – канзаши.
-
Модульное оригами – схема складывания двойного лебедя
В этом уроке вы узнаете, что такое модульное оригами, а для изучения будет представлена схема складывания двойного лебедя.Как узнать сколько пар полюсов у асинхронного двигателя + видео обзор
Как определить число пар полюсов асинхронного двигателя?
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.


Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту


Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту

Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Смотрите также: Как отличить асинхронный двигатель от двигателя постоянного тока
Как определить частоту вращения электродвигателя?
 Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
 Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.


Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
 Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:

Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Электродвигатели в составе мотор-редукторов.


Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.


Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.

4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.