Почему колеса при повороте руля поворачиваются на разный угол?
Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
О твет на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы и вызывало проскальзывание наружного – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Наглядно это можно видеть на многоосных тележках грузовиков и прицепов: не поворачивающиеся колеса в повороте движутся с проскальзыванием, и шины изнашиваются быстро и неравномерно. Соответственно, для решения этих проблем и обеспечения правильного движения управляемых колес по их траектории они и поворачиваются на разные углы.

Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
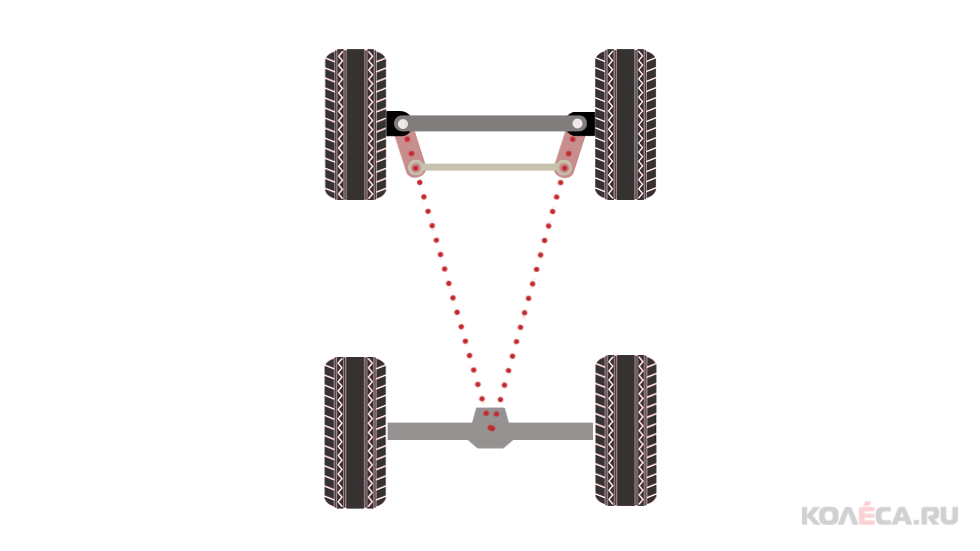
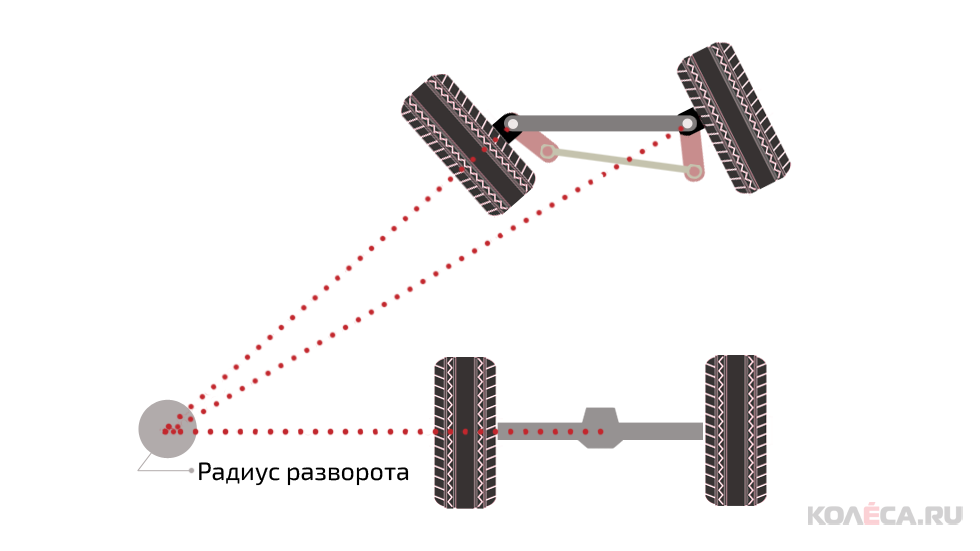
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают, а радиус окружности для наружного колеса — это фактически радиус разворота автомобиля «от бордюра до бордюра» с поправкой на ширину шины.
Стоит отметить, что изображение выше – схематическое, и рулевое управление автомобиля, разумеется, сложнее, чем то, что изображено на схеме. Однако общая геометрия справедлива для всех «гражданских» автомобилей.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.
Кстати, в самом начале мы не зря упомянули не только разные пути, которые проходят в повороте колеса, но и разные скорости их вращения. Для того, чтобы обеспечить возможность вращения колес на одной оси с разными скоростями, как мы уже рассказывали, нужен дифференциал.
Большая Энциклопедия Нефти и Газа
Поворот управляемых колес осуществляется при помощи руля, воздействующего на червяк, связанный с червячным колесом, насаженным на вал задней управляемой оси. Угол поворота колес равен 60 в каждую сторону. [1]
Поворот управляемых колес на различные углы осуществляется рулевой трапецией. Рулевая трапеция сконструирована таким образом, что при углах поворота, часто встречающихся в эксплуатации, т.е. до, 12 — 15, оба колеса поворачиваются примерно на одинаковые углы. [2]
Поворот управляемых колес осуществляется при вращении водителем рулевого колеса. От него вращение передается через вал на редуктор и далее через сошку на рулевой привод. [3]
Углы поворота управляемых колес в крайних положениях фиксируются регулируемыми ограничителями. [4]
Для поворота управляемых колес достаточно переместить золотник из нейтрального положения в рабочее. [5]
Для поворота управляемых колес при изменении направления движения автомобиля усилие от рулевого механизма необходимо передать к управляемым колесам. [6]
Указатель поворота управляемого колеса состоит из пластмассового корпуса с крышкой, в котором размещается редуктор и стрелка. [7]
Вследствие поворота управляемых колес вектор скорости каждого из них, параллельный продольной оси автомобиля, перестает совпадать с плоскостью вращения колес. В результате в контакте колес с дорогой возникают боковые силы, перпендикулярные плоскости вращения колес. Эти боковые силы заставляют управляемые колеса и автомобиль в целом отклоняться от прямолинейного движения и совершать поворот. [8]
Механизм поворота управляемых колес при изменении направления движения станции состоит ( ЗИФ-55 и ДК-9М) из продольного рычага 28 ( см. рис. 73, д), соединенного с одной стороны с дышлом и поворачивающегося на своей оси. [9]
Маневрирование поворотом управляемых колес наиболее распространенное. Расстановка управляемых колес при этом способе зависит от типа и назначения автомобиля ( рис. XVI. Рулевое управление с поворотными колесами достаточно полно удовлетворяет большинству предъявляемых требований. [10]
Он обеспечивает поворот управляемых колес с небольшим усилием на рулевом колесе. Это может быть достигнуто за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничено количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2 — 3, то существенно увеличивается время, требуемое на поворот автомобиля, а это недопустимо по условиям движения. Поэтому передаточное число в рулевых механизмах ограничивают в пределах 20 — 30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель. [11]
Величина угла поворота управляемых колес зависит от величины хода поршня усилителя рулевого управления. Регулировка углов поворота осуществляется путем изменения длины штока. В целях уменьшения износа сопрягаемых деталей шестерни с амортизатором и рейка работают в масляной ванне. Уровень масла в картере рейки, определяемый контрольной пробкой, следует проверять через каждые 100 рабочих часов. Кроме того, следует производить сезонную смену масла в соответствии с картой смазки. [12]
Для осуществления поворота управляемых колес достаточно переместить золотник относительно гильзы только на 0 7 — 0 8 мм, при этом нагнетаемая насосом рабочая жидкость будет направлена в одну из полостей цилиндра. [13]
Такой мерой является поворот управляемых колес в сторону заноса, увеличивающий радиус поворота и уменьшающий центробежную силу. Поворот следует совершать возможно быстрее и, погасив занос, быстро вернуть колеса в нейтральное положение. [14]
какой узел рулевого управления автомобиля обеспечивает поворот управляемых колес на разные углы

Почему колеса при повороте руля поворачиваются на разный угол?

Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
О твет на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы и вызывало проскальзывание наружного – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Наглядно это можно видеть на многоосных тележках грузовиков и прицепов: не поворачивающиеся колеса в повороте движутся с проскальзыванием, и шины изнашиваются быстро и неравномерно. Соответственно, для решения этих проблем и обеспечения правильного движения управляемых колес по их траектории они и поворачиваются на разные углы.
Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают, а радиус окружности для наружного колеса — это фактически радиус разворота автомобиля «от бордюра до бордюра» с поправкой на ширину шины.
Стоит отметить, что изображение выше – схематическое, и рулевое управление автомобиля, разумеется, сложнее, чем то, что изображено на схеме. Однако общая геометрия справедлива для всех «гражданских» автомобилей.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.
Кстати, в самом начале мы не зря упомянули не только разные пути, которые проходят в повороте колеса, но и разные скорости их вращения. Для того, чтобы обеспечить возможность вращения колес на одной оси с разными скоростями, как мы уже рассказывали, нужен дифференциал.
Тест 16. Рулевое управление
Выберите номера всех правильных ответов
1. ТРИ СОСТАВНЫЕ ЧАСТИ РУЛЕВОГО УПРАВЛЕНИЯ:
1) усилитель; 6) поперечная тяга;
2) рулевая сошка; 7) силовой цилиндр;
3) рулевое колесо; 8) рулевая трапеция;
4) распределитель; 9) рулевой механизм;
5) рулевой привод; 10) насос гидроусилителя руля.
Дополните и выберите номера всех правильных ответов
2. ПОВОРОТ КОЛЕС НА РАЗНЫЕ УГЛЫ ОБЕСПЕЧИВАЕТСЯ РУЛЕВОЙ _________ЕЙ.
1) балкой моста; 4) рамой автомобиля;
2) продольной тягой; 5) рулевой колонкой;
3) поперечной тягой; 6) поворотными рычагами.
3. ОБЛЕГЧЕНИЕ УСИЛИЯ НА РУЛЕВОМ КОЛЕСЕ ОБЕСПЕЧИВАЕТСЯ:
1) рулевой колонкой; 4) рулевой сошкой;
2) рулевой трапецией; 5) рулевым механизмом;
3) рулевым приводом; 6) поворотными рычагами.
4. ПЕРЕДАЕТ УСИЛИЕ ОТ РУЛЕВОГО МЕХАНИЗМА К УПРАВЛЯЕМЫМ КОЛЕСАМ:
5) гидроусилитель руля.
В ЕГО СОСТАВ ВХОДЯТ:
11) продольная тяга;
12) поперечная тяга;
13) поворотные рычаги;
14) перепускной клапан;
15) реактивные плунжера.
5. ТИПЫ РУЛЕВЫХ МЕХАНИЗМОВ:
6. НАИБОЛЕЕ ИЗНАШИВАЕМЫЕ УЗЛЫ В РУЛЕВОМ УПРАВЛЕНИИ:
1) шарниры рулевых тяг;
2) насос гидроусилителя;
3) клапан распределителя;
4) подшипники рулевой колонки;
5) зубчатое зацепление в рулевом механизме.
7. РУЛЕВОЙ МЕХАНИЗМ НА РИС. 16.1 ПРОИЗВОДСТВА:
8) глобоидальный червяк — ролик;
9) цилиндрический червяк — зубчатый сектор.
8. ЗАЗОР В ЕГО ЗАЦЕПЛЕНИИ РЕГУЛИРУЕТСЯ:
9. ТРИ СОСТАВНЫЕ ЧАСТИ ГИДРОУСИЛИТЕЛЯ РУЛЯ:
1) насос; 5) приводной ремень;
2) трубопроводы; 6) перепускной клапан;
3) распределитель; 7) реактивные плунжера;
4) силовой цилиндр; 8) распределительный диск.

10. НАПРАВЛЕНИЕ ПОТОКА ЖИДКОСТИ В СИСТЕМЕ ГИДРОУСИЛИТЕЛЯ МЕНЯЕТ:
4) распределительный диск.
ДЛЯ ЭТОГО ОН УСТАНАВЛИВАЕТСЯ:
7) в рулевой колонке;
8) с зазором в корпусе.
10) сжимает пружину;
11) перемещается в корпусе;
12) ограничивает давление в системе.
13) открывает одни каналы и закрывает другие.
11. ИНТЕГРАЛЬНЫЙ РУЛЕВОЙ МЕХАНИЗМ (РИС. 16.2):
2) отделен от гидроусилителя;
3) объединен с гидроусилителем;
5) включает распределитель;
6) включает силовой цилиндр.
Рис. 16.2. Рулевой механизм и усилитель ЗИЛ-4314
12. ДЕТАЛИ ГИДРОУСИЛИТЕЛЯ ПОЗИЦИЯ НА РИС. 16.2:
3) обратный клапан; С. 18.
4) реактивный плунжер; D. 34.
5) предохранительный клапан. Е. 15.
13. ДЕТАЛИ РУЛЕВОГО МЕХАНИЗМА ПОЗИЦИЯ НА РИС. 16.2:
4) поршень-рейка; D. 21.
5) зубчатый сектор. Е. 23.
Выберите номера всех правильных ответов
14. ДИНАМИЧЕСКОЕ СЛЕДЯЩЕЕ ДЕЙСТВИЕ В УСИЛИТЕЛЕ (РИС. 16.2) ОБЕСПЕЧИВАЕТСЯ:
15. ОБЛЕГЧЕНИЕ УПРАВЛЕНИЯ ПРИ ОТКАЗЕ НАСОСА ОБЕСПЕЧИВАЕТ (РИС. 16.2):
1) клапан 9; 4) лопасти 16;
2) сошка 37; 5) пружина 33.
16. ВОЗДЕЙСТВИЕ СИЛОВОГО ЦИЛИНДРА:
НА ЭЛЕМЕНТЫ ПРИВОДА
1) на рулевую сошку;
2) на поворотный рычаг;
3) на продольную рулевую тягу;
4) на поперечную рулевую тягу.
Дополните и выберите номера всех правильных ответов
17. НАСОС ГИДРОУСИЛИТЕЛЯ РУЛЯ ГРУЗОВЫХ АВТОМОБИЛЕЙ (РИС. 16.3) НАЗЫВАЕТСЯ ___________ ДЕЙСТВИЯ, ПОТОМУ, ЧТО ОН ЗА ОДИН ОБОРОТ РОТОРА СОВЕРШАЕТ:
1) два нагнетания; 4) одно нагнетание;
2) три нагнетания; 5) три всасывания и три нагнетания.
Рис. 16.3. Насос гидравлического усилителя рулевого управления
18. МАКСИМАЛЬНОЕ ДАВЛЕНИЕ ЭТОГО НАСОСА, МПа:
19. ДЕТАЛИ НАСОСА ГИДРОУСИЛИТЕЛЯ
7) перепускной клапан;
8) распределительный диск.
ПОЗИЦИЯ НА РИС. 16.3:
20. ПЕРЕПУСКНОЙ КЛАПАН (РИС. 16.3):
1) ограничивает давление в насосе;
2) ограничивает давление в магистрали;
3) перепускает масло в коллектор;
4) перепускает масло в магистраль;
5) перепускает масло в радиатор.
21. ПРЕИМУЩЕСТВА ЭЛЕКТРИЧЕСКИХ УСИЛИТЕЛЕЙ РУЛЕВОГО УПРАВЛЕНИЯ:
2) более экологичны;
3) не имеют жидкости;
4) потребляют меньше мощности;
5) они зависят от частоты вращения двигателя;
6) подходят к любой компоновке рулевого управления.
Устройство и виды рулевого привода
Рулевой привод представляет собой механизм, состоящий из рычагов, тяг и шаровых шарниров и предназначенный для передачи усилия от рулевого механизма к управляемым колесам. Устройство обеспечивает необходимое соотношение углов поворота колес, что влияет на эффективность рулевого управления. Помимо этого конструкция механизма позволяет уменьшить автоколебания управляемых колес и исключить их самопроизвольный поворот при работе подвески автомобиля.
Конструкция и виды рулевого привода
К приводу относятся все элементы, находящиеся между рулевым механизмом и управляемыми колесами. Структура узла зависит от типа используемой подвески и рулевого механизма.
Рулевой привод механизма “шестерня-рейка”
Данный вид привода, входящий в состав рулевой рейки, получил наибольшее распространение. Он состоит из двух горизонтальных тяг, рулевых наконечников и поворотных рычагов стоек передней подвески. Рейка с тягами соединяется при помощи шаровых шарниров, а наконечники фиксируются стяжными болтами либо при помощи резьбового соединения.
Также следует заметить, что с помощью рулевых наконечников регулируется схождение колес передней оси.
Привод с механизмом типа «шестерня – рейка» обеспечивает поворот передних колес автомобиля на разные по величине углы.
Рулевая трапеция
Рулевая трапеция обычно применяется в рулевом управлении с червячным или винтовым механизмом. Она состоит из:
Каждая тяга имеет на своих концах шарниры (опоры), которые обеспечивают свободное вращение подвижных деталей рулевого привода относительно друг друга и кузова автомобиля.
Рулевая трапеция обеспечивает поворот управляемых колес на разные углы. Нужное соотношение углов поворота осуществляется путем подбора угла наклона рычагов относительно продольной оси автомобиля и длины рычагов.
Исходя из конструкции средней тяги трапеция бывает:
Также она может отличаться по типу расположения средней тяги: перед передней осью либо после нее. В большинстве случаев рулевая трапеция применяется на грузовых автомобилях.
Рулевой наконечник с шаровым шарниром
Шаровой шарнир сделан в виде съемного наконечника рулевой тяги, в его состав входят:
Шарнир выполняет передачу усилия от рулевого механизма к управляемым колесам и обеспечивает подвижность соединения элементов рулевого привода.
Шаровые опоры воспринимают все удары от неровностей дорожной поверхности и потому подвержены быстрому износу. Признаками износа шаровых опор являются люфт и стук в подвеске при проезде неровностей. В этом случае неисправную деталь рекомендуется заменить на новую.
По способу устранения зазоров шаровые шарниры подразделяются на:
Заключение
Рулевой привод является важной частью рулевого управления автомобиля. От его исправности зависит безопасность и комфорт управления автомобилем, поэтому необходимо своевременно проводить техническое обслуживание и менять вышедшие из строя детали.
Все о углах установки колес часть 2.

Самой идее стабилизации рулевого управления автомобиля за счет положительного кастера более сотни лет. Считается, что впервые она была предложена в английском патенте 1896 года неким Артуром Кребсом. Для объяснения механизма этого явления обычно приводят в пример конструкцию поворотных колес роялей и продуктовых тележек. Особенность упомянутых колес состоит в том, что ось их поворота смещена относительно оси вращения. В этом случае след оси поворота (воображаемая точка ее пересечения с поверхностью) находится на некотором расстоянии от центра пятна контакта колеса. За счет этого колесо в движении всегда стремится строго следовать за идущей впереди осью. В качестве стабилизирующего фактора выступает сила сопротивления качению. Как только линия ее действия отклоняется от следа оси, возникает момент, возвращающий колесо в исходную позицию. Стабилизирующее действие тем сильнее, чем больше сила сопротивления качению и смещение оси поворота. Если бы с автомобильным колесом все было так же просто и понятно! Нет, что касается конечного результата, аналогия соблюдается. А вот описанный «рояльно-тележечный» механизм стабилизации имеет примерно такое же отношение к автомобильному колесу, как и сами рояли к автомобилям.
Почему это так? Одна из причин, причем далеко не главная, состоит в том, что в автотехнике стабилизация управляемых колес достигается несколько иными конструктивными мерами. Нужный вылет оси поворота (его называют плечом стабилизации) чаще всего получают за счет ее наклона в продольном направлении на угол, который и называют кастером. Наглядный пример такой конструкции – устройство передней вилки мотоцикла. Ее наклон придает управляемому колесу движущегося «полуавтомобиля» стабильность, что позволяет байкерам безнаказанно выполнять трюки, не держась за руль. Иногда наклон сочетают с небольшим смещением оси в ту или иную сторону от центра вращения колеса. У современных легковых автомобилей обычно кастер принимает положительные значения, которые не превышают десяти угловых градусов. При этом плечо стабилизации оказывается небольшим по отношению к размерам колеса. А уж плечо продольных сил (сопротивления качению или тяги) – и вовсе мизерным. Поэтому они просто не в состоянии стабилизировать массивное колесо автомобиля. Да это и не нужно – в момент действия дестабилизирующих боковых сил в пятне контакта автомобильного колеса с дорогой генерируются достаточно мощные поперечные (боковые) реакции, парирующие возмущение. Они возникают вследствие сложных процессов деформации шины, катящейся с боковым уводом. Значительная деформация эластичной шины в радиальном, касательном и тангенциальном направлениях и есть главная причина отличия механизма стабилизации автомобильного колеса от слабо или вовсе не деформируемых колес роялей и продуктовых тележек. В результате характер стабилизации меняется с «продольного» на «поперечный».
Дополнительная информация о боковом уводе, механизме образования боковой реакции и стабилизирующего момента приведена ниже.
Увод и стабилизация

Стоит подчеркнуть, что в результате увода колеса под действием боковой силы (силового увода) равнодействующая элементарных боковых реакций всегда оказывается смещенной назад по ходу движения от центра контактной площадки. То есть стабилизирующий момент действует на колесо даже в том случае, когда след оси поворота совпадает с центром пятна контакта. Возникает вопрос: зачем вообще нужен кастер? Дело в том, что стабилизирующий момент (Мст) зависит от различных факторов (конструкции шины и давления в ней, нагрузки на колесо, сцепления с дорогой, величины продольных сил и т.д.) и не всегда оказывается достаточным для оптимальной стабилизации управляемых колес. На этот случай плечо стабилизации увеличивают продольным наклоном оси поворота, т.е. положительным кастером. Дестабилизирующие силы, действующие на колесо движущегося автомобиля, вызываются разными причинами, но, как правило, имеют одинаковый, инерциальный характер. Соответственно, и боковые реакции, и стабилизирующие моменты с ростом скорости увеличиваются. Поэтому стабилизацию управляемых колес, в которую вносит весомый вклад кастер, называют скоростной. С увеличением скорости она «рулит» поведением управляемых колес. На малых скоростях влияние этого механизма становится несущественным. Забегая вперед, упомянем, что здесь работает стабилизация весовая, за которую отвечает наклон оси поворота колеса в поперечном направлении.
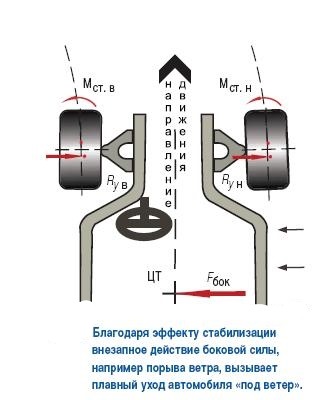
Установка оси поворота управляемых колес с положительным кастером полезна не только для их стабилизации. Положительный кастер устраняет опасность резкого изменения траектории и даже опрокидывания автомобиля под действием внезапной боковой силы. Она может быть следствием порыва ветра или движения поперек склона. Благодаря положительному кастеру автомобиль даже с отпущенным рулем плавно поворачивает «под ветер» или «под уклон». Увеличение продольного угла наклона в положительную сторону в общем случае, имеет позитивные следствия, но приводит к росту усилия руления. Это значит, что возрастают нагрузки на усилитель и детали рулевого механизма. Поэтому выбор кастера – опять-таки компромисс, который у современных легковых автомобилей достигается при величинах порядка +2–6°. Меньшие значения, как правило, типичны для машин с большой нагрузкой на ось – чтобы чрезмерно не увеличивать усилие на руле. Своим нехарактерным подходом к выбору кастера известны конструкторы Mercedes-Benz. У большей доли «мерсов» продольный угол наклона оси поворота лежит в пределах 0–12°. Почему это так?
Дело в том, что таким образом конструкторы усиливают еще одно благоприятное следствие кастера. Продольный наклон оси поворота приводит к существенному изменению развала управляемых колес при их повороте. Механизм зависимости проще понять, если представить гипотетическую ситуацию, когда ось поворота колеса расположена горизонтально (кастер равен +90°). В этом случае «поворот» управляемого колеса полностью трансформируется в изменение его наклона относительно дорожного полотна, т.е. развала. Тенденция такова, что развал внешнего колеса в повороте становится более отрицательным, а внутреннего – более положительным. Как мы уже уяснили, это благотворно отражается на устойчивости автомобиля при маневрах. Чем больше кастер, тем больше изменение углов развала в повороте. Поэтому иногда (как и в случае с M-B) угол наклона оси поворота намеренно увеличивают. Чтобы при этом не превысить допустимое усилие на рулевом колесе (не увеличить чрезмерно плечо стабилизации), ось поворота смещают в продольном направлении так, что она проходит на некотором расстоянии позади оси вращения колеса.
Эксперименты, объектом которых был автомобиль BMW 323i, показали, что при движении по прямой на каждое его управляемое колесо действует момент порядка 40 Н•м.
Отсюда становится понятно, к чему может привести нарушение регулировки кастера. Разница этого параметра для левого и правого колес влияет на способность автомобиля держать прямолинейную траекторию. Если она превышает 1°, отличие моментов на управляемых колесах становится ощутимым и возникает боковой дрейф автомобиля в сторону колеса с меньшим кастером. Это, в общем случае, негативное явление иногда используют во благо и намеренно придают кастеру и углам развала управляемых колес разных бортов немного отличные значения. К примеру, автомобиль, предназначенный для правостороннего движения, из-за профилирования дорожного полотна испытывает дрейф по направлению к обочине. Чтобы его компенсировать, правое колесо устанавливают с чуть более отрицательным развалом и немного более положительным кастером.
Естественно, проделать эту процедуру можно лишь в том случае, если таковая возможность предусмотрена. В последнее время автопроизводители стараются избавить сервисменов от забот по регулировке развала, и тем более кастера. Эти параметры все чаще только контролируются. Согласно рекомендациям любая процедура контроля УУК должна предваряться проверкой уровня кузова. Особенно тщательно положение кузова контролируется при измерении кастера – этот параметр напрямую зависит от разницы его уровня впереди и сзади.

Об этом стоит помнить апологетам «буратино-тюнинга», увлекающимся установкой проставок под заднюю часть кузова. Если внешний вид автомобиля, принимающего неприличную позу, – исключительно дело вкуса, то снижение и даже полная потеря скоростной стабилизации управляемых колес – вопрос безопасности, в том числе безопасности ни в чем не повинных «соучастников» дорожного движения. Заметного влияния на износ шин регулировка кастера не оказывает.
Любопытно, что лет тридцать и более тому назад в спецификациях на легковые автомобили можно было увидеть диаметрально противоположную картину – у большинства автомобилей кастер был отрицательным. Причина в том, что тогда был в моде «легкий руль». Поскольку усилитель рулевого управления был в диковинку, инженеры таким способом боролись за то, чтобы автомобиль на скорости рулился «одним пальцем». При этом достаточная скоростная стабилизация колес достигалась благодаря повсеместному применению шин диагональной конструкции. Они более подвержены деформациям, чем шины радиальные. Вследствие этого даже при отрицательном наклоне оси поворота продольный снос боковой реакции оказывался достаточным для создания стабилизирующего момента. Если на такой «ретромобиль» установить современные радиальные шины, он будет рыскать из стороны в сторону. Устранить проблему можно регулировкой кастера – нужно придать углу положительное значение.
Говоря об ориентации оси поворота управляемых колес, нельзя обойти вниманием угол поперечного наклона (SAI – Steering Axis Inclination). Этот параметр подвески иногда относят к группе вторичных. Тем не менее поперечный наклон оси оказывает существенное влияние на поведение автомобиля. Его контроль очень важен при диагностике подвески.
Оси поворота рояльного и мотоциклетного колес лежат в центральной плоскости вращения. На первый взгляд, это неплохой вариант. Почему бы и на автомобиле не использовать аналогичный принцип? Распространено мнение, что автомобилестроители не идут этим путем исключительно из-за конструктивной сложности. Действительно, при существующих схемах подвески проще разместить ось поворота колеса сбоку от него. И все же, если бы это сулило большие преимущества, решение наверняка нашлось бы.

Например, такое, какое было реализовано французскими конструкторами на автомобиле Citroen D в 50-е годы и использовалось вплоть до середины 70-х. Они расположили оба поворотных шарнира двухрычажной подвески внутри обода, в центральной плоскости качения колеса. Для этого пришлось переместить тормозные механизмы на главную передачу. Ось поворота колеса имела небольшой продольный угол наклона, а поперечный угол, плечо обкатки, а также и развал были равны нулю. Что из этого получилось?
По отзывам, автомобиль на скорости уверенно форсировал лужи, грязь, снежную кашу и неровности дороги (даже если они попадались на пути одного из колес) без заметной реакции на руле и без отклонения от прямолинейного движения. Безразличие к неприятным для обычного автомобиля препятствиям объяснимо – любые силы, действующие в плоскости качения колеса, не оказывают никакого воздействия на рулевое управление ввиду отсутствия плеч относительно оси поворота. Несмотря на этот безусловный плюс, «ситроеновская» схема распространения не получила. И не столько из-за некоторого ухудшения эффективности торможения, вызванной изменением места размещения тормозов. Причина в том, что такой способ поворота управляемых колес не позволяет использовать эффект весовой стабилизации рулевого управления и обеспечить его приемлемую чувствительность.
Опять стабилизация? Да, опять. Ведь стабилизация, которая достигается за счет кастера, на то и «скоростная», что работает она только на достаточно высоких скоростях. При движении и маневрировании со скоростью пешехода «эффект рояля» пренебрежимо мал. В этом случае чтобы заставить управляемые колеса сопротивляться отклонению от нейтрального положения и автоматически возвращаться к нему после прекращения действия сил, вызвавших отклонение, используют другой механизм – стабилизацию за счет веса автомобиля, приходящегося на управляемое колесо. Весовая стабилизация возникает главным образом благодаря наклону оси поворота в поперечном направлении. Почему «главным образом»? Потому что «неглавным образом» в весовую стабилизацию колес вносит вклад и кастер, но здесь его влияние второстепенно.
Механизм весовой стабилизации работает так. При повороте колеса его цапфа движется по дуге окружности, плоскость которой перпендикулярна оси поворота. Если ось вертикальна, цапфа перемещается горизонтально. Если ось наклонена, траектория цапфы отклоняется от горизонтали.
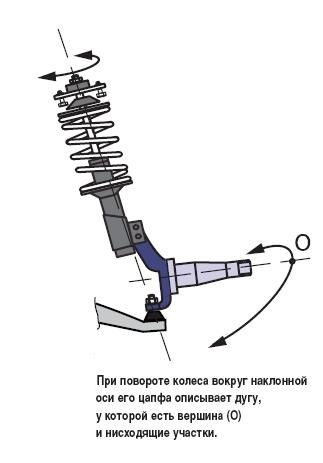
У дуги, которую описывает цапфа, появляются вершина и нисходящие участки. Положение верхней точки дуги определяется направлением наклона оси поворота колеса. При поперечном наклоне вершина дуги соответствует нейтральному положению колеса. Значит, при отклонении колеса от нейтрали в любую сторону цапфа (а вместе с ней и колесо) будет стремиться опуститься ниже исходного уровня. Колесо работает как домкрат – приподнимает находящуюся над ним часть автомобиля. «Домкрату» противодействует сила, прямо зависящая от ряда параметров: веса поднятой части автомобиля, угла наклона оси, величины ее поперечного смещения и угла поворота колеса. Она пытается вернуть все в исходную, устойчивую позицию, т.е. повернуть руль в нейтральное положение. Получается, что благодаря поперечному наклону оси поворота автомобиль сам помогает водителю «отруливаться».
Кастер также вносит лепту в весовую стабилизацию рулевого управления. Если ось поворота колеса одновременно наклонена и в поперечном, и в продольном направлении, дуга, которую описывает колесная цапфа, изменяет ориентацию. Ее вершина смещается так, что цапфы обеих колес в нейтральной позиции оказываются на нисходящей части дуги. В результате при повороте руля одна из них движется по дуге вверх, другая – вниз. Итог – крен передней части кузова, увеличение загрузки одного из колес и усиление его весовой стабилизации. Этот эффект также используют для оптимизации положения кузова автомобиля в повороте. Механизм весовой стабилизации работает всегда. На неподвижном или медленно движущемся автомобиле он действует в одиночестве, с увеличением скорости ему все в большей степени аккомпанирует динамическая стабилизация.
Выбор величины SAI – поиск оптимума. С уменьшением поперечного угла эффективность весовой стабилизации снижается. Избыточный наклон приводит к чрезмерному усилию руления при маневрировании, сопровождающемся поворотом колес на большой угол, например при парковке. Определяя положение оси поворота в поперечной плоскости (в том числе и SAI), автомобилестроители наряду с весовой стабилизацией принимают в расчет условие обеспечения оптимального плеча обкатки. С этим параметром подвески также связано немало кривотолков. Например, бытует неверное представление, что оптимум для плеча обкатки – его [img]отсутствие. Якобы, с увеличением плеча возрастает усилие руления.
razvalanet.ucoz.com/secret/22.jpg[/img]
На самом деле плечо обкатки не оказывает влияния на легкость рулевого управления. Действительно, при наличии плеча обкатки действующие на управляемые колеса продольные силы создают моменты, стремящиеся развернуть их вокруг оси поворота. Но в случае равенства сил на обоих колесах моменты оказываются «зеркальными», т.е. равными и противоположно направленными. Взаимно компенсируя друг друга, они не оказывают воздействия на рулевое колесо. Однако моменты нагружают детали рулевой трапеции растягивающими или сжимающими (в зависимости от расположения плеча обкатки) усилиями. Чтобы ограничить эти нагрузки, плечо обкатки не должно быть излишне большим. Тем не менее в большинстве случаев «его не может не быть».
Плечо обкатки – один из параметров, который влияет на чувствительность рулевого управления. Благодаря ему руль «сигнализирует» водителю о нарушении равенства продольных реакций на управляемых колесах, которое может быть следствием проезда препятствий и неровностей дороги, неравного распределения тормозных сил между правым и левым колесом и т.д. В этих случаях внезапно возникающий дисбаланс моментов продольных сил передается через рулевое колесо на руки водителя. Главное, чтобы «сигнал» не был чрезмерным и не снижал комфортность и безопасность вождения. Это важное условие учитывается при проектировании автомобиля и нередко нарушается (чаще – неосознанно) при его эксплуатации. Дело в том, что на величину плеча обкатки ощутимо влияет конструкция колеса. Модное увлечение широкими колесами с низкопрофильными шинами, а также установка дисков с нештатным вылетом могут вызвать критическое изменение чувствительности рулевого управления.
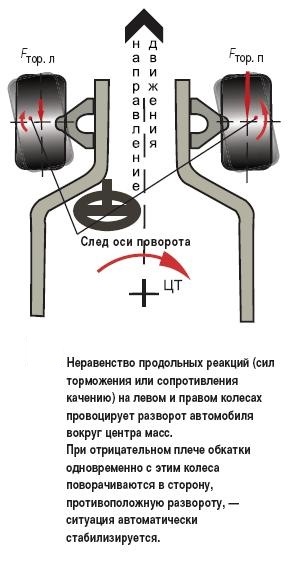
Плечо обкатки может быть как положительным, так и отрицательным. Обычно отрицательное плечо обкатки применяют на автомобилях с диагональной двухконтурной тормозной системой. Такая мера позволяет стабилизировать поведение автомобиля в чрезвычайной ситуации – при отказе или снижении эффективности одного из контуров. Дисбаланс тормозных сил приводит к появлению момента, стремящегося развернуть автомобиль относительно центра масс. При отрицательном плече обкатки одновременно с этим неравенство сил торможения вызывает поворот управляемых колес в сторону уменьшения разворота автомобиля. Аналогичный механизм работает при внезапном увеличении продольной реакции на одном из управляемых колес. Например, при проколе шины, вызывающем рост силы сопротивления качению. Благодаря отрицательному плечу обкатки колеса и в этом случае поворачиваются так, что парируют самопроизвольный разворот автомобиля.
Плечо обкатки обычно выбирают в пределах плюс 50 минус 20 мм. У некоторых автомобилей с независимой подвеской передних колес в негруженом состоянии оно может достигать 60–80 мм. При положительном плече обкатки SAI в большинстве случаев составляет 6–12°, при отрицательном – 11–19°. Как видно, отрицательные значения плеча получают за счет увеличения SAI. Это позволяет достичь желаемого результата без значительного уменьшения поперечного смещения оси и обеспечить приемлемый стабилизирующий момент.

Поперечный наклон оси поворота управляемых колес, как мы выяснили, влияет на стабилизацию и чувствительность рулевого управления. Поэтому SAI особенно тщательно проверяют при наличии проблем с этими характеристиками автомобиля. Поперечный угол наклона также рекомендуется контролировать в случае бокового дрейфа автомобиля, который не устраняется регулировкой кастера и развала. Его причиной может быть ощутимая (более 1°) разница SAI правого и левого колес. При контроле SAI нужно иметь в виду, что этот параметр зависит от угла развала колеса (с уменьшением развала SAI увеличивается и наоборот), поэтому его проверку обязательно предваряют корректировкой развала. Отклонение SAI от нормы свидетельствует о смещении координат одной или обеих точек подвески, задающих положение оси поворота. Причиной смещения может быть, например, деформация поворотной цапфы, чашки крепления амортизатора, рычага, переднего подрамника или неправильная регулировка последнего, если таковая предусмотрена. Уточнить причину можно одновременно анализируя три параметра подвески передних колес: развал, SAI и включенный угол.
Тема углов установки колес настолько интересная, насколько и объемная. Ее, как и ремонт квартиры, нельзя закончить – можно лишь прервать волевым усилием. Что мы и делаем. В заключение остается высказать несколько соображений. Приступая к рассмотрению основных УУК, мы рассчитывали выявить однозначные закономерности, принципы или правила, которыми руководствуются «подвескостроители» при выборе параметров установки колес. К сожалению, наши расчеты не оправдались. Оказалось, что правил не так много, да и те, что есть, изобилуют большим количеством исключений, что снижает значимость самих правил. Сегодня не существует никаких математических зависимостей или компьютерных алгоритмов, позволяющих заложить исходные данные (конструктивные параметры автомобиля и подвески) и на выходе получить искомый результат – величины схождения, развала, кастера и т.д. Теперь понятно, чем вызвана сложность математического определения УУК. Параметры установки колеса значительно меняются при изменении режима движения и развесовки автомобиля. Изменение одного параметра вызывает одновременное изменение ряда других. Каждый параметр одновременно влияет на несколько характеристик автомобиля. Улучшение одной из них зачастую сопровождается ухудшением другой. Какой характеристике отдать предпочтение, что выбрать в качестве критерия оптимизации? Тем более любопытно, как в таком случае определяют УУК разработчики подвески? Неужто методом «тыка»?
Выбор УУК – комплексная задача, нацеленная на поиск оптимума и решаемая методом последовательных приближений. Решение начинается с кинематического расчета положения колес для различных условий движения. Определение поведения колеса в подвесках относительно простой конструкции (двухрычажной или МакФерсон) трудностей не вызывает. Расчет многозвенных подвесок выполняют с использованием методов компьютерного моделирования. Далее анализируют, как изменение ориентации колеса сказывается на пятне контакта и какие это будет иметь последствия для критических характеристик автомобиля: устойчивости, управляемости, интенсивности износа шин и т.д. Варьируя кинематику подвески, «на бумаге» добиваются приемлемого результата, который становится отправной точкой для самого важного этапа – экспериментальной доводки.
В ходе испытаний выполняют большое количество специальных тестов (движение по прямой, по кругу, в повороте, с «переставкой» и т.п.), регистрируют объективные показатели (угол поворота и усилие на руле, максимальную скорость маневра без отрыва колеса, температуру разных зон протектора и т.д.) и субъективные ощущения тест-пилотов. Зачастую эксперименты начисто перечеркивают теорию и приносят парадоксальные с теоретической точки зрения результаты. Это наводит на мысль, что оптимальный комплекс УУК – своего рода гармония, которую невозможно «поверить алгеброй».
Как отличаются углы поворота управляемых колес и какой путь они проходят при повороте автомобиля

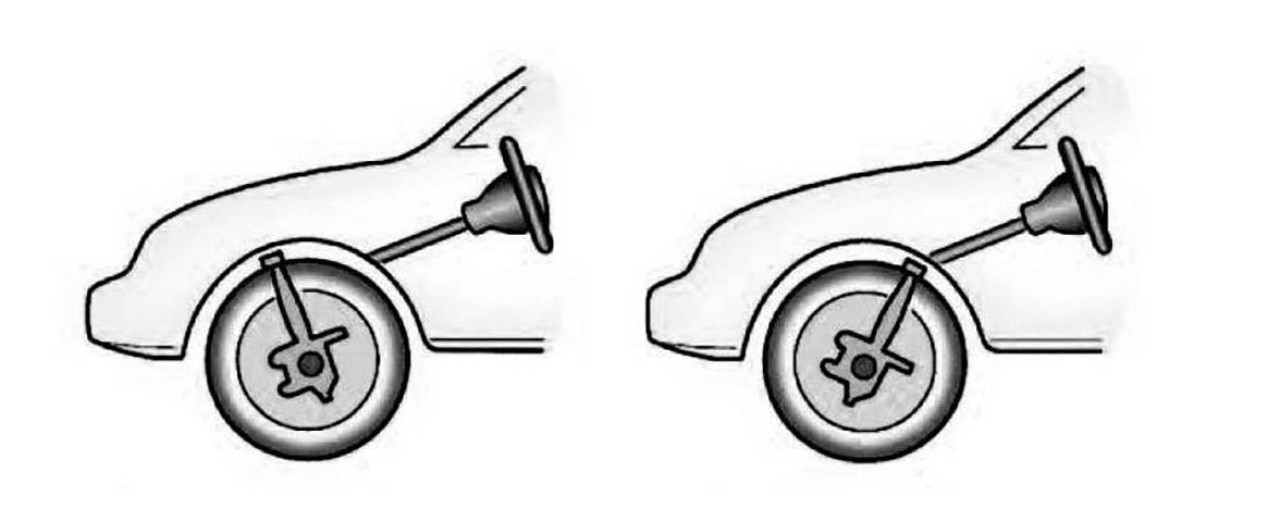
Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
О твет на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы и вызывало проскальзывание наружного – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Наглядно это можно видеть на многоосных тележках грузовиков и прицепов: не поворачивающиеся колеса в повороте движутся с проскальзыванием, и шины изнашиваются быстро и неравномерно. Соответственно, для решения этих проблем и обеспечения правильного движения управляемых колес по их траектории они и поворачиваются на разные углы.
Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
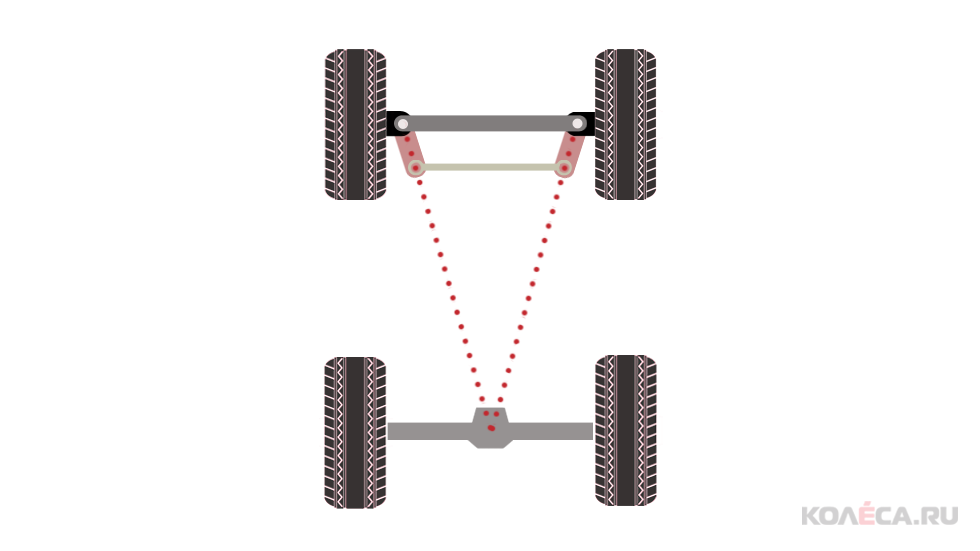
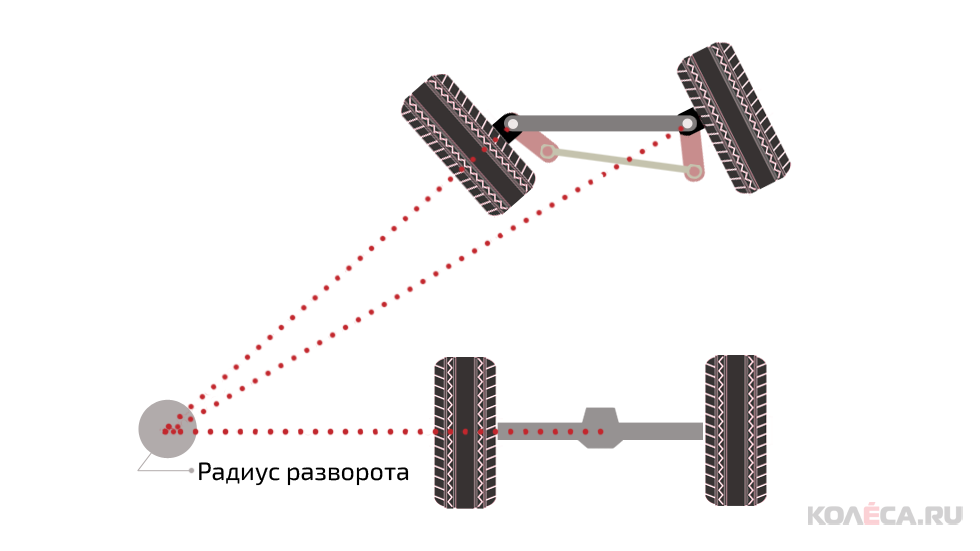
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают, а радиус окружности для наружного колеса — это фактически радиус разворота автомобиля «от бордюра до бордюра» с поправкой на ширину шины.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.
Кстати, в самом начале мы не зря упомянули не только разные пути, которые проходят в повороте колеса, но и разные скорости их вращения. Для того, чтобы обеспечить возможность вращения колес на одной оси с разными скоростями, как мы уже рассказывали, нужен дифференциал.

Наверняка вы сталкивались с тем, что автомобиль при отпущенном руле едет в сторону или кто-то из знакомых жаловался, что «пора бы мне уже съездить проверить развал», хотя при это был категорически не прав. То, что в народе привычно называют “развал-схождение” — это замер и выставление углов установки колёс. Причём помимо собственно угла развала и угла схождений есть ещё и третий угол, ничуть не менее важный.
Что такое углы установки колес?
Каждый автопроизводитель для улучшения устойчивости и управляемости предусматривает для конкретной модели автомобиля определённое положение передних (и задних) колёс относительно друг друга и плоскости дороги. Параметры развала, схождения и кастера принято называть углами установки колес.
Под развалом понимают угол наклона колес по отношению к перпендикулярной плоскости (в обычном случае — к дороге). При отрицательном развале колёса визуально становятся будто «домиком», при положительном угле развала верхняя часть колеса наклоняется наружу относительно нижней.


Схождение — это сумма углов между плоскостью, которая проходит через центры колес и продольной осью автомобиля. Звучит немного непонятно, но на деле всё просто: если оно положительное, то плоскости вращения колёс пересекаются впереди автомобиля словно «сходясь навстречу» друг другу, при отрицательном — где-то сзади (расхождение).
Положительное схождение (слева) – это именно схождение колёс навстречу друг другу впереди автомобиля


Положительное схождение (слева) – это именно схождение колёс навстречу друг другу впереди автомобиля
Кастер (иногда говорят кастор) от англ. Caster angle (угол продольного наклона) это угол, образованный вертикалью и проекцией оси поворота колеса на продольную плоскость автомобиля. При положительном кастере ось поворота колеса наклонена назад относительно направления движения, а при отрицательном — наоборот, «смотрит вперёд».
Отрицательный кастер (слева) приводит к наклону стойки вперёд

Отрицательный кастер (слева) приводит к наклону стойки вперёд
Почему на разных машинах углы бывают разными?


Stance, baby: ярко выраженный отрицательный развал колёс является неотъемлемым атрибутом некоторых автомобильных субкультур
Однако в зависимости от конструкции и кинематики подвески, жесткости упругих элементов, ширины колеи, вылета колёс и многих других факторов углы установки колёс на разных машинах заметно отличаются. Более того, они могут изменяться даже в пределах одной модели в зависимости от типа подвески (обычная или спортивная) и размерности шин.
Как регулируются углы установки колес?
На многих современных переднеприводных автомобилях углы развала передних колёс заданы конструктивно, да и кастер (угол продольного наклона стойки) не регулируется, поэтому вся настройка сводится к проверке и регулировке схождения.
Однако так было не всегда — на той же «восьмерке», с которой выросли все остальные автомобили этой платформы , регулировались не только схождение с развалом, но и кастер. Интересно, что допуски при этом были довольно большими, а ремонтники при регулировке далеко не всегда меняли все углы, предпочитая во многих случаях не трогать кастер — дескать, возни много и толку особо никакого.
Заводские параметры углов Самары выглядят так: развал передних колёс = 0°±30′, схождение = 0°15′ ± 10′ и кастер = 0°20±30’0. Как видно, допуски действительно довольно большие — развал по заводским нормативам может «гулять» в пределах одного градуса, а кастер из пятидесяти «плюсовых» минут имеет законное право «уходить в минус».
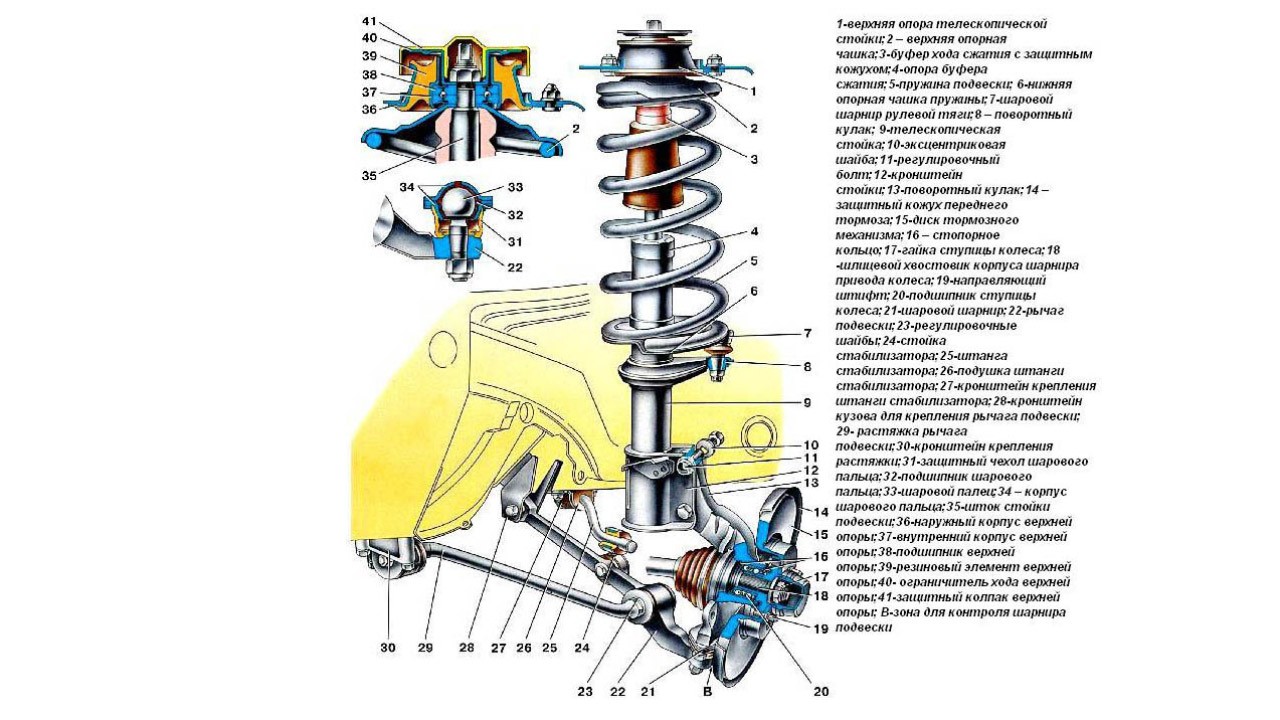
Передняя подвеска ВАЗ-2108 – классический Мак-Ферсон без подрамникабез подрамника

Некоторые автомобилисты утверждают, что отклонения в минуты (!) они способы заметить безо всякого стенда – просто внимательно взглянув на авто спереди…
На что влияет кастер?
С кастером ситуация обстоит не менее интересно. Чуть выше мы вспомнили, что при нулевом угле наклона стойка стоит строго вертикально – то есть, колесо со ступицей никуда не смещается относительно вертикали. При отрицательном кастере стойка в верхней части словно наклоняется вперёд, а колесо, соответственно, уходит назад. При положительном – наоборот.
На переднеприводных ВАЗах, например, параметр кастера изменяется с помощью регулировочных шайб, которые подкладываются под элементы передней подвески – кронштейны продольных рычагов (растяжек).
Кастер на Самаре задаётся с помощью нескольких шайб


Продольные растяжки подвески ВАЗ-2108 спереди крепятся к кронштейнам, сзади – к поперечным рычагам. Именно поэтому они влияют на кастер

Так выглядит нулевой кастер: колесо стоит в колесной арке симметрично по отношению к бамперу и крылу

Кастер важен не только своим прямым воздействием на скоростные качества автомобиля, но и тем, что он влияет на углы схождения и развала, которые меняются в зависимости от наклона стойки. Поэтому начинать регулировку углов передних колёс нужно именно с кастера. Затем следует регулировка развала, а в самую последнюю очередь необходимо настраивать схождение, помня о взаимосвязанности этих параметров между собой.

При изменении кастера нужно раскручивать продольные растяжки подвески. Это требует времени и сил – особенно, если автомобиль старый
Какие выбрать углы?
Развал передних колёс на Самаре регулируется с помощью эксцентрикового болта (позиция 3 на рисунке) на корпусах передних амортизаторов

Настройка всех углов установки передних колёс на ВАЗе занимает больше времени, чем на автомобилях вроде Renault Logan

Регулировка схождения на Самаре – процесс довольно хлопотный (особенно со стороны водителя), поэтому некоторые развальщики даже самостоятельно (!) изготавливают подобный специнструмент

Обратите внимание, как изменяются углы схождения и развала при частичной загрузке! (первое фото – на пустом автомобиле, второе – с водителем весом 65 кг)


Перед регулировкой схождения руль нужно выставить строго горизонтально и зафиксировать, для чего на СТО используются специальные приспособления
Что будет, если их не делать?
В большинстве случаев проверку углов установки колес рекомендуют выполнять не реже одного раза в 30 000 км и сразу же после того, если автомобиль угодил колесом в крупную яму или стал участником даже небольшого ДТП. Ведь и первое, и второе может привести к смещению элементов подвески, что нарушит параметры схождения, кастера или развала.
А что будет, если их не делать вообще? Ничего хорошего, разумеется. Как минимум, автомобиль будет хуже вести себя и на прямой, и в поворотах, ведь отклонение любого из параметров влияет и на устойчивость машины, и на её управляемость. Во-вторых, сбитые углы приведут к тому, что машину начнет уводить в сторону, поэтому водителю придется удерживать руль с большей силой для того, чтобы сохранить прямолинейное движение.

Износ внутренних дорожек — результат большого отрицательного развала
Когда регулировка углов установки колес не помогает?
При повороте автомобиля его управляемые колеса должны катиться в плоскости своего вращения без бокового скольжения. Для обеспечения этого условия векторы скоростей центров всех колес должны быть перпендикулярны радиусам, проведенным из центра поворота (рис. 1).

У автомобиля, имеющего жесткие в поперечном направлении шины, векторы скоростей совпадают со средними плоскостями колес, и центр поворота О находится на продолжении оси заднего моста. Соотношение между углами поворота θн и θв соответственно наружного и внутреннего колес определяется из треугольников ОАВ и ОСД :
где Lшк – расстояние между центрами шкворней, равное приблизительно колее управляемых колес.
Из равенства (1) следует, что внутреннее колесо относительно центра поворота должно быть повернуто на больший угол, чем внешнее.
Чтобы обеспечить требуемое соотношение между углами поворота управляемых колес их соединяют рулевой трапецией.
Однако точного выполнения равенства (1) рулевая трапеция не обеспечивает. Поэтому при проектировании трапеций считают достаточным, если при значениях θн от 5 до 8 градусов расхождение между теоретическим и действительными значениями θн не превышает 12…15‘, а при θв от 25 до 30 градусов – не более 3 градусов.
При углах поворота до 15 градусов зависимость θн = f ( θв ) близка к линейной, что позволяет вместо углов θн и θв использовать расчетный средний угол θ , равный их полусумме.
Так как на автомобилях устанавливаются эластичные шины, то векторы скоростей центров колес вследствие их увода не совпадают со средними плоскостями колес.
Изменится также и соотношение углов поворота управляемых колес, которое будет зависеть от скорости движения, а так как учитывать этот фактор конструктивно сложно, то им пренебрегают.
Следовательно, автомобиль на эластичных шинах при совершении поворота движется с боковым проскальзыванием управляемых колес, и величина этого проскальзывания будет зависеть от скорости движения.
Колебания управляемых колес

Управляемые колеса, передний мост, подвеска и рулевое управление представляют собой упругую операционную систему, которая при наличии возмущающих импульсов может приходить в колебательное движение, сопровождающееся вилянием управляемых колес.
Так, передний мост вследствие упругой деформации рессор может перемещаться относительно продольной оси автомобиля (точка О на рис. 2, а) на угол ψ , а колеса вследствие упругой деформации привода управления – на угол φ относительно оси шкворня (точка δ на рис. 2, б).
Наезд одним из колес переднего моста на неровность дороги вызовет поворот управляемых колес относительно шкворней, который в свою очередь будет стремиться увеличить наклон колес. Таким образом, перекос переднего моста в результате наезда на неровность вызовет угловые колебания колес, которые в свою очередь усилят перекос моста. Колебания будут продолжаться и после того, как колесо съехало с неровности.
Такие колебания называются собственными . Они зависят только от характеристик упругих элементов подвески, моментов инерции и масс отдельных деталей.
Но бывают и вынужденные колебания колес автомобиля, если в системе управляемых колес имеется какой-нибудь постоянный источник возмущающих сил. Такая система будет иметь незатухающие колебания .
Источником незатухающих колебаний может являться, например, неуравновешенность (дисбаланс) колес. Например вентиль создает центробежную силу С (рис.3, а). При диаметральном расположении вентилей (рис. 3, б) возникает знакопеременный возмущающий момент, который и будет источником автоколебаний.
Дисбаланс колес может быть вызван неравномерностью распределения весовых элементов шины, дефектами колесных дисков и другими факторами. Наиболее эффективным методом борьбы с дисбалансом колес является их балансировка на специальном оборудовании.

При скорости движения автомобиля более 70 км/ч колеса могут создавать 6…8 колебаний в секунду со значительной амплитудой. Это может сопровождаться периодическим отрывом колес от дороги, вследствие чего возможна потеря управления автомобилем.
Способом борьбы с возникновением колебаний управляемых колес является устранение дисбаланса колес, а также применение независимых подвесок. Независимая подвеска не должна позволять управляемым колесам совершать угловые перемещения в плоскости дороги.
На рис. 5 показаны схемы независимых подвесок автомобиля. Подвески а , б и в позволяют колесам перемещаться только поступательно.

Подвески г и д позволяют колесам совершать угловые перемещения в вертикальной плоскости, т. е. могут явиться причиной возникновения колебаний колес. При этом подвеска д лучше подвески г , поскольку ее амплитуда колебаний будет меньше, чем подвески г .
На управляемые колеса при движении автомобиля всегда действуют силы, стремящиеся отклонить их от заданного водителем направления. Устойчивость движения автомобиля обеспечивается стабилизацией управляемых колес, т. е. их способностью без участия водителя возвращаться в нейтральное положение, соответствующее прямолинейному движению.

Стабилизация управляемых колес достигается за счет установки шкворней, соединяющих поворотные цапфы с колесами, под углом к вертикали в поперечной и продольной плоскостях.
Шкворни устанавливают в поперечной плоскости под некоторым углом α к вертикали ( рис. 1,а ).
При такой установке шкворней поворот управляемых колес в любую сторону от нейтрального положения сопровождается подниманием балки моста. Этому препятствует вес автомобиля, стремящийся удержать мост в нижнем положении и повернуть колеса в обратном направлении. Возникающий таким образом стабилизирующий эффект зависит от веса автомобиля, угла поперечного наклона шкворней α и плеча обкатки а .
Этот стабилизирующий эффект можно сравнить с явлением самопроизвольно закрывающейся или открывающейся двери — при определенном положении шарниров навеса двери на косяке она будет стремиться к закрыванию, а при наклоне навесов в другой плоскости — дверь будет самопроизвольно открываться, если ее не придерживать.
При повороте автомобиля дополнительный стабилизирующий эффект создается за счет наклона шкворней в продольной плоскости на угол β ( рис. 1,б ). Этот наклон шкворня обычно называют кастер (или кастор).
Кастер — угол между вертикалью и проекцией оси поворота колеса на продольную плоскость автомобиля. Продольный наклон обеспечивает самовыравнивание управляемых колёс за счёт скорости автомобиля и трения качения колеса с опорной поверхностью (дорогой).
Боковая реакция дороги на колесо приложена в точке опорной поверхности, находящейся на одной вертикали с центром колеса или даже дальше благодаря эластичности шины. Произведение этой силы на плечо bβ образует момент, стремящийся вернуть колесо в начальное положение.
При качении управляемого колеса сила сопротивления качению создает на плече с ( рис. 1,в ) момент сопротивления повороту, вследствие чего увеличивается усилие на рулевом колесе.
Чтобы снизить этот момент, плоскость управляемых колес устанавливают под углом γ к вертикали. Этот угол называют углом развала колес. Наличие развала уменьшает плечо с и тем самым облегчает управление автомобилем.
Кроме того, при этом колесо поджимается к внутреннему подшипнику ступицы, что предотвращает виляние колеса в случае появления зазоров в подшипниках ступицы.

При качении колеса, плоскость которого отклонена от вертикали, да еще при наличии эластичной шины возникает боковой увод. Для его компенсации оба колеса устанавливают под углом схождения (сокращенно – схождение, сход колес) в горизонтальной плоскости.
Обычно схождение определяют как разность расстояний В и А ( рис. 1,г ) и замеряют в миллиметрах:
Простая логика подсказывает, что колеса автомобиля должны быть установлены строго вертикально и параллельно направлению движения, поскольку именно в таком положении сопротивление качению колес и износ шин наименьшие. Тем не менее, если провести несложные измерения на примере одного или нескольких машин, можно убедиться, что это не так – чаще всего колеса (особенно управляемые), устанавливаются под различными углами к вертикальной и горизонтальной проекциям автомобиля.
И можно не сомневаться, что такая установка колес не является причиной какой-либо неисправности ходовой части или рулевого управления, а трезвым замыслом конструкторов и разработчиков автомобиля.

Для чего и зачем это нужно? К сожалению, далеко не каждый водитель и даже специалист по ремонту автомобилей способен полноценно ответить на этот вопрос.
Давайте попробуем разобраться в этом любопытном феномене и понять – полезна автомобилю эта конструкторская идея, или является плодом чрезмерной фантазии инженеров?
Сначала окунемся в историю.
Если кому-либо приходилось внимательно рассматривать древнюю колесную технику, наверняка замечали, что колеса, например, карет или конных повозок, пушечных лафетов и др. имели заметный развал, т. е. устанавливались с наклоном наружу (положительный развал) или внутрь (отрицательный развал) от вертикальной оси. Впрочем, если даже и замечали, но особого значения этим странностям не придавали, объясняя их тем, что транспорт достаточно древний, технологии в зачаточном состоянии, и обеспечить строгую вертикальность колесам не представлялось возможным, да и не требовалось.
Но, оказывается, это далеко не всегда соответствует истине – уже в давние времена углы установки колес в виде положительного или отрицательного развала использовались для определенных целей.
Так, например, считалось, что во время быстрого движения кареты или повозки грязь от положительно разваленных колес будет отлетать в стороны, не забрызгивая экипаж и пассажиров. Тихоходные телеги наоборот оснащались колесами с отрицательным развалом, поскольку при медленном движении брызги и грязь от колес не разлетались далеко, зато при повреждении элементов крепления колеса оно дольше удерживалось на оси, не соскакивая, что позволяло вовремя заметить неисправность и устранить ее.
Можно привести и другие примеры. В частности, отрицательный развал огромных колес на азиатских арбах объясняется тем, что таким образом существенно возрастает устойчивость транспортного средства, поскольку увеличивается колесная база. Это достаточно полезно с учетом того, что с увеличением диаметра колес центр тяжести арбы смещается вверх, снижая устойчивость против опрокидывания.
Орудийные лафеты имели колеса с положительным развалом для того, чтобы артиллеристам удобнее было накатывать орудие за колеса руками сбоку, не опасаясь отдавить ноги.
Как видите, углам установки колес транспортных средств уделялось внимание уже с давних пор, при этом назначение этих углов отличалось в каждом конкретном случае. Но, конечно же, перечисленные выше причины развала колес у древних повозок, карет и других колесных средств передвижения отличаются от причин, по которым колеса современных автомобилей устанавливаются под различными углами к вертикали и горизонтали.
Правильные углы установки колес — один из важнейших факторов, обеспечивающих нормальную управляемость, стабильность и устойчивость автомобиля при прямолинейном движении и при маневрировании. Оптимальные для каждой модели параметры геометрии подвески закладываются на этапе проектирования. Заданные значения углов установки колес подвержены изменению и требуют периодической регулировки по причине естественного износа узлов и элементов ходовой части или после ремонта подвески.
Назначение углов установки колес
Корректно настроенная геометрия подвески позволяет автомобилю более эффективно воспринимать силы и моменты, возникающие в зоне (пятне) контакта колеса с дорожной поверхность во время различных режимов движения. Этим обеспечивается предсказуемое поведение автомобиля на дороге: стабильность движения по прямой, устойчивость в поворотах, стабилизация при разгонах и торможении.
Также благодаря отсутствию излишнего сопротивления качению колес, возникающего при неправильной их ориентации к плоскости качения, происходит более равномерный износ шин, что позволяет увеличить срок их службы.

Заданные производителем значения углов установки колес являются оптимальными для каждого конкретного автомобиля, соответствуют его назначению, особенностям конструкции и настройки подвески. Однако, в случае необходимости, конструктивно предусмотрена возможность их изменения либо регулировки. При этом количество параметров, которые можно регулировать для каждого автомобиля, индивидуально.

Развал колес
Отклонение значений угла развала от нормы оказывают следующее влияние на движение автомобиля:
Слишком большой отрицательный угол развала благотворно влияет на устойчивость автомобиля в поворотах, однако при этом существенно ухудшается сцепление колес с дорогой при прямолинейном движении и имеет место повышенный износ внутренней стороны шин.
Слишком большой положительный угол развала тоже обеспечивает хорошее сцепление колес с дорогой, но при этом ухудшается устойчивость в поворотах и имеет место повышенный износ наружной стороны шин.

Развал – параметр, который отвечает за ориентацию колеса относительно дорожного покрытия. Мы помним, что в идеале они должны быть перпендикулярны друг другу, т.е. развала быть не должно. Тем не менее, у большинства дорожных автомобилей он есть. В чем суть конструкторской идеи?
До недавнего времени наблюдалась тенденция именно разваливать колеса, т.е. придавать углам развала положительные значения. Установка колес с положительным развалом объяснялась стремлением перераспределить нагрузку между внешним и внутренним ступичными подшипниками. Считалось, что при положительном угле развала колес большая часть нагрузки приходится на внутренний подшипник, который проще выполнить более массивным и прочным. В результате выигрывает долговечность подшипникового узла.
Это объяснение справедливо только для идеальной ситуации – прямолинейного движения автомобиля по абсолютно ровной дороге. При маневрах и проезде неровностей, даже самых незначительных, подшипниковый узел испытывает динамические нагрузки, которые на порядок превышают статические силы. Да и распределяются они не совсем так, как предполагает положительный развал колес.
Иногда пытаются толковать положительный развал как дополнительную меру, направленную на уменьшение плеча обкатки (см. ниже), что способствует уменьшения усилий при манипуляции рулем. Однако такой способ воздействия далеко не самый удачный. Он сопряжен с одновременным изменением ширины колеи и включенного угла наклона оси поворота колеса, что негативно сказывается на устойчивости и управляемости автомобиля.
На выбор величины развала также оказывает влияние профилирование дорожного полотна, которое в поперечном сечении имеет выпуклый профиль. Чтобы в этом случае колесо оставалось перпендикулярным к опорной поверхности, ему нужно придать небольшой положительный угол развала.
В последние годы колеса большинства серийных автомобилей в статике устанавливаются с отрицательным развалом. Дело в том, что на первый план выходит задача обеспечения их наилучшей устойчивости и управляемости.
Развал, также, является параметром, который оказывает определяющее влияние на так называемую боковую реакцию колес. Именно она противодействует центробежным силам, действующим на автомобиль в повороте, и способствует его удержанию на криволинейной траектории.
Однако то, что хорошо для гоночных болидов, не всегда приемлемо для серийных автомобилей. Чрезмерный отрицательный развал вызывает повышенный износ внутренней зоны протектора. С увеличением наклона колеса сокращается площадь пятна контакта. Сцепление колес при прямолинейном движении уменьшается, в свою очередь снижается эффективность ускорения и торможения.
На способность автомобиля удерживать прямолинейную траекторию избыточный отрицательный развал влияет так же, как и недостаточное схождение — автомобиль становится излишне чувствителен к манипуляциям рулем. Виновна в этом все та же тяга развала.
Чтобы обеспечить автомобилю хорошую устойчивость, недостаточно в статике сделать углы развала отрицательными. Конструкторы подвески должны добиться, чтобы колеса сохраняли оптимальную (или близкую к ней) ориентацию на всех режимах движения.
Выполнить это непросто, поскольку при маневрах любые изменения положения кузова, сопровождающиеся смещением элементов подвески (клевки, боковые крены и т.д.), приводят к существенному изменению развала колес. При этом чем больше диапазон ходов подвески, тем больше изменение развала в движении.
Схождение колес
Различают суммарное и индивидуальное схождение.
Индивидуальное схождение рассчитывается отдельно для каждого колеса. Это отклонение плоскости его вращения от продольной оси симметрии автомобиля.
Суммарное схождение рассчитывается как сумма индивидуальных углов схождения левого и правого колес одной оси. Аналогично определяется суммарное схождение в миллиметрах.
Отклонение значений угла схождения от нормы оказывают следующее влияние на движение автомобиля:
Слишком большой отрицательный угол схождения затрудняет удержание заданной траектории движения, поскольку приводит к повышенной реакции автомобиля на манипуляции рулевым управлением, а также к повышенному износу шины с внутренней стороны.
Слишком большой положительный угол схождения тоже приводит к повышенной чувствительности автомобиля к манипуляции рулевым управлением, а также к повышенному износу шины с наружной стороны.

Обычно необходимость схождения колес объясняют наличием (следствием) развала. Это не совсем правильное объяснение, поскольку схождение продиктовано несколькими факторами, влияющими на управляемость и устойчивость автомобиля в движении.
При качении наклоненного колеса в пятне контакта действительно присутствует боковая сила, которую мы упомянули выше — тяга развала.
Известно несколько факторов, обусловливающих необходимость схождения колес.
Во-первых, предварительно выставленным схождением компенсируется влияние продольных сил, действующих на колесо при движении автомобиля. Характер и результат этого влияния зависят от многих обстоятельств — ведущее колесо или свободно катящееся, управляемое, или нет, от кинематики и эластичности подвески.
В случае подвески с большой податливостью (что характерно, например, для рычажных конструкций с эластичными втулками) результат многократно возрастет. Если колесо не только свободно катящееся, но и управляемое, ситуация усложняется.
За счет появления у колеса дополнительной степени свободы та же сила сопротивления оказывает двоякое воздействие. Момент, изгибающий переднюю подвеску, дополняется моментом, стремящимся развернуть колесо вокруг оси поворота. Разворачивающий момент, величина которого зависит от расположения оси поворота, воздействует на детали механизма рулевого управления и вследствие их податливости также влияет на изменение схождения колеса в движении.
В зависимости от плеча обкатки разворачивающий момент может быть положительным или отрицательным. То есть он может либо усиливать расхождение колес, либо противодействовать этому. Если не принять все это во внимание и установить изначально колеса с нулевым схождением, в движении они займут расходящееся положение.
Последствия этого характерны для случаев нарушения регулировки схождения — повышенный расход топлива, пилообразный износ протектора шин и ухудшение управляемости автомобиля.
При выборе величины схождения наряду с компенсацией продольных сил учитывают и другие факторы, которые вносят поправки в конечный результат.
Один из наиболее важных факторов — обеспечение оптимальной управляемости автомобиля. С ростом скоростей движения и динамичности автомобилей этот фактор приобретает все большее значение.
Управляемость — понятие многогранное, поэтому стоит уточнить, что схождение колес наиболее ощутимо влияет на стабилизацию прямолинейной траектории автомобиля и его поведение на входе в поворот. Наглядно это влияние можно пояснить на примере управляемых колес.
Допустим, при прямолинейном движении на одно из управляемых колес оказывается случайное возмущающее воздействие от неровности дороги. Возросшая сила сопротивления поворачивает колесо в направлении уменьшения схождения. Через рулевой механизм воздействие передается на второе колесо, схождение которого, наоборот, увеличивается. Если изначально колеса имеют положительное схождение, сила сопротивления на первом колесе уменьшается, а на втором — растет, что противодействует возмущению.
Когда схождение равно нулю, противодействующий эффект отсутствует, а когда оно отрицательное — появляется дестабилизирующий момент, способствующий развитию возмущения. Автомобиль с такой регулировкой схождения будет рыскать по дороге, что недопустимо для обычного дорожного автомобиля.
Таким образом, статические параметры схождения, которые приведены в регулировочных данных, представляют собой некий конструкторский компромисс между желанием сэкономить на топливе и резине и добиться оптимальных для автомобиля характеристик управляемости.
Рассмотренные выше углы установки колес — развал и схождение – это параметры, которые определяются для всех колес автомобиля. Далее речь пойдет об угловых характеристиках, которые имеют отношение только к управляемым колесам и определяют пространственную ориентацию оси их поворота.
Известно, что положение оси поворота управляемого колеса автомобиля определяется двумя углами — продольным и поперечным. Попробуем разобраться, почему ось поворота колес не выполняют строго вертикально к поверхности дороги.
Поперечный угол наклона оси поворота колеса
Угол продольного наклона оси поворота колеса
Различают положительный и отрицательный углы продольного наклона оси поворота колеса.
Положительный угол продольного наклона оси поворота колес способствует возникновению дополнительной динамической стабилизации автомобиля при движении на средней и высокой скорости. Однако при этом ухудшается управляемость автомобиля на малой скорости.

Справедливо отмечают, что главная функция кастера – скоростная (или динамическая) стабилизация управляемых колес автомобиля. Стабилизацией в данном случае называют способность управляемых колес сопротивляться отклонению от нейтрального (соответствующего прямолинейному движению) положения и автоматически возвращаться к нему после прекращения действия внешних сил, вызвавших отклонение.
Плечо обкатки
Плечо обкатки — это расстояние между точкой, образованной пересечением оси симметрии колеса и опорной поверхности, и точкой пересечения линии поперечного наклона оси поворота и опорной поверхности.
Плечо обкатки положительное, если точка пересечения поверхности и ось поворота колеса лежат справа от оси симметрии колеса (нулевого плеча), и отрицательное, если располагается слева от него. Если эти точки совпадают — то плечо обкатки считается нулевым.

Данный параметр влияет на стабилизацию и поворачиваемость колеса. Оптимальным значением для современных автомобилей является нулевое либо положительное плечо обкатки. Знак плеча обкатки определяется развалом, поперечным наклоном оси поворота колеса и вылетом колёсного диска.
Автопроизводители не рекомендуют устанавливать колесные диски с нестандартным вылетом, поскольку это может повлечь изменение заданного плеча обкатки на отрицательное значение. Это может негативно сказаться на устойчивости и управляемости автомобиля.
Изменение значений углов установки колес и их регулировка
Углы установки колес подвержены изменениям вследствие естественного износа деталей ходовой части, рулевого управления и подвески, а также после замены колес на новые.
Все без исключения рулевые тяги и наконечники имеют резьбовое соединение, которое позволяет увеличить или уменьшить их длину для регулировки величин углов схождения колес. Схождение задних колес, равно как и передних, регулируется на всех типах подвесок, за исключением задней зависимой балки или моста.
Неправильный сход-развал задних колес на переднеприводном автомобиле оказывает меньшее влияние на его управляемость и неравномерный износ шин, поскольку задняя ось менее нагружена, а колеса являются свободно вращающимися, и спектр внешних сил, действующих на них, существенно меньше, чем для передних ведущих колес.