Электропривод
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
Содержание
Виды электроприводов
- Нерегулируемые, простейшие, предназначенные для пуска и остановки двигателя, работающие в односкоростном режиме.
- Регулируемые, допускающие изменение частоты вращения и управление пуском и торможением электродвигателя для заданного технологического процесса. Способ регулирования зависит от типа двигателя. Так, для машин переменного тока применимо управление частотой, током в роторе. Для коллекторных машин применимо регулирование напряжением.
- Неавтоматизированные
- Автоматизированные
- Линейные — для частных случаев.
- Вращательные — наиболее распространённый тип. Чаще всего линейное перемещение получают механическими преобразователями вращательного движения двигателя.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Принцип действия исполнительных механизмов не является ключевым фактором выбора электропривода, ключевыми в данном случае являются характеристики технологического процесса, которые должен обеспечить механизм. Этому же условию должен соответствовать и электропривод.
Например алгоритм выбора технических специалистов, обслуживающих технологические процессы, в которых исполнительным механизмом является трубопроводная арматура, будет следующим:
- Выполняемая функция: запорная, дросселирующее регулирование, запорно-регулирующий режим, отсечка и т.д.
- Пропускная способность.
- Транспортируемая среда: абразивная, агрессивная химически, вязкая пульпа, огнеопасный газ, пар и т.д.
- Время срабатывания арматуры (в зависимости от типа).
- Высокая ремонтопригодность и длительный срок службы.
Следует иметь ввиду, что не может быть универсального электропривода. В качестве примера, приведём средний медеплавильный цех: цех имеет несколько анодных печей, печи работают в разных режимах: загрузка, плавление, восстановление, окисление и это неполный перечень. Требуемые характеристики механизмов для этих режимов различны, на каждом процессе бывает задействована различная группа приводной арматуры. Диаметры разнятся от 200 до 900 мм, различны и подающиеся среды – мазут, газ, воздух и проч., температурные режимы так же изменяются.
С другой стороны, конструкция электропривода может быть модульной, части привода могут свободно меняться, причём блоки разных исполнений должны быть по возможности унифицированы и легко заменяться.
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на регулировочной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на регулировочной характеристике, сравнительно невелики, так как невелико время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках.
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. [1]
Число выпускаемых двигателей постоянного тока составляет лишь 4-5% числа двигателей переменного тока.
Современные российские производители электроприводов
Проблема регулирования скорости движения машин и механизмов с целью экономии электроэнергии решалась в последние десятилетия в основном с помощью регулируемых электроприводов. Причём, если ещё в 70-80-х годах преобладающими были регулируемые электроприводы постоянного тока, то в настоящее время они повсеместно вытесняются регулируемыми электроприводами переменного тока, как правило, с асинхронными электродвигателями с короткозамкнутым ротором. Объясняется это достижениями микроэлектроники, позволяющими реализовать небольшими аппаратными затратами довольно сложные алгоритмы управления электродвигателем переменного тока, который в общем случае предпочтительнее двигателя постоянного тока по надёжности, массе, габаритам и стоимости.
Некоторые из производителей в России и СНГ: ООО «Электропривод» (Украина, Запорожье), ОАО Завод «Преобразователь» (Украина, Запорожье), ОАО «Запорожский электроаппаратный завод», НИПТИЭМ, ОАО «Владимир», ООО «АВВИ», ООО «Двигатель», «ТОМЗЭЛ», ЗАО Томск, ООО «Кранприборсервис» на базе СКТБ Башенного Краностроения (СКТББК г. Москва), ЗАО «Комбарко» (Россия, г. Москва), ООО НПФ «Ирбис» (г. Новосибирск), ООО «ЧЭАЗ — ЭЛПРИ» (дочернее предприятие ОАО «Чебоксарский электроаппаратный завод»), НТЦ «Приводная техника» (г. Челябинск), НПП «Уралэлектра» (г. Екатеринбург).
В статье А. Колпакова дан полный обзор российских производителей электроприводов.
Автомобильные электроприводы — общие сведения
Назначение электропривода (ЭП) — обеспечить движение исполнительных механизмов устройств и управление этим движением. ЭП представляет собой электромеханическую систему, осуществляющую преобразование электрической энергии в механическую и управление потоками как электрической (ЭЭ), так и механической (МЭ) энергии.
ЭП включает совокупность взаимосвязанных и взаимодействующих друг с другом механических, электромеханических, электротехнических и электронных элементов и устройств. ЭП состоит из силовой части, включающей электродвигатель и устройство для передачи механической энергии исполнительному механизму, и системы управления, содержащей устройства для формирования требуемых свойств ЭП и средства защиты от возникновения внештатных ситуаций.
Структурная схема ЭП приведена на рис. 1. Утолщенными линиями на схеме показаны силовые потоки энергии, а тонкими линиями — маломощные управляющие и информационные цепи.
Рис. 1. Структурная схема ЭП автомобиля
Электромеханическим преобразователем электрической энергии, потребляемой от источника тока 3, в механическую энергию является электродвигатель 1. В некоторых режимах работы ЭП (динамическое торможение, рекуперация), электродвигатель осуществляет и обратное преобразование энергии, получая механическую энергию от исполнительного механизма.
От электродвигателя механическая энергия через механический, гидравлический или электромагнитный передаточный механизм 9 подается на рабочий орган 7 исполнительного механизма 8. Передаточный механизм обеспечивает согласование параметров движения электродвигателя и исполнительного механизма.
Большое значение при проектировании ЭП имеет правильный выбор способа соединения приводного электродвигателя с исполнительным механизмом соответствующего функционального устройства. Непосредственное их соединение без передаточного механизма обычно не возможно, так как вал электродвигателя, как правило, имеет значительно большие частоты вращения, чем валы исполнительных механизмов. В ЭП, где вращательное движение вала электродвигателя преобразуется в поступательное движение рабочего органа, необходимы передаточные механизмы.
Быстроходные электродвигатели имеют меньшие габаритные размеры, массу и стоимость, чем тихоходные. Однако их использование в ЭП с исполнительными механизмами при низких скоростях перемещения рабочих органов способствует тому, что передаточный механизм становится сложнее и наиболее дорогостоящим, потери в нем увеличиваются, а КПД ЭП существенно снижается. С другой стороны менее выгодной может оказаться упрощенная кинематическая схема передаточного механизма тихоходного электродвигателя. Выбор того или иного варианта ЭП производится на основании сопоставления возможных комбинаций соединения электродвигателя и исполнительного механизма.
Для получения энергии с требуемыми для электродвигателя 1 параметрами и управления потоком этой энергии в электрическую цепь между электродвигателем и источником электроэнергии включается силовой преобразователь 2. В ЭП применяются различные типы силовых преобразователей: управляемые и неуправляемые выпрямители, инверторы, импульсные преобразователи напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного тока, в которых в основном используются полупроводниковые элементы (диоды, транзисторы, тиристоры и другие электронные приборы).
Управление электроприводом и автоматизацию его работы обеспечивает блок управления 4. Блок управления вырабатывает выходной сигнал управления (7у, который подается в силовой преобразователь, в соответствии с входным сигналом (13, задающим характер движения рабочего органа исполнительного механизма, и рядом других сигналов (7Д с, дающих информацию о реализации функций исполнительного механизма, характере его движения, работе отдельных узлов ЭП, возникновении аварийных ситуаций и т.д. Блок управления 4 вместе с силовым преобразователем 2 образуют систему управления 5 ЭП 6.
ЭП классифицируют по характеру движения, типу и принципу работы силового преобразователя, числу используемых электродвигателей, виду источника электроэнергии, способу управления, наличию или отсутствию механической передачи и т.д.
По характеру движения различают ЭП вращательного, колебательного и поступательного движения, при этом частота вращения вала электродвигателя может быть регулируемой и нерегулируемой, а само движение — непрерывным или дискретным, однонаправленным или двунаправленным (реверсивным).
По числу используемых электродвигателей различают групповые, индивидуальные (одиночные) и взаимосвязанные (многодвигательные) ЭП. Групповые ЭП характеризуются тем, что один его электродвигатель приводит в движение несколько исполнительных механизмов одного устройства или один исполнительный механизм нескольких устройств. Индивидуальный ЭП обеспечивает движение одного рабочего органа исполнительного механизма. Взаимосвязанный ЭП представляет собой два или несколько электрически и механически связанных между собой индивидуальных ЭП, работающих совместно на один или несколько исполнительных механизмов. При этом, если электродвигатели связаны между собой механически и работают на общий вал, то такой ЭП называется многодвигательным. В многодвигательном ЭП не только каждый исполнительный механизм приводится в движение отдельным электродвигателем, но даже элементы одного исполнительного механизма снабжаются индивидуальными электродвигателями.
В ряде случаев электродвигатель крепится к исполнительному механизму с помощью фланца или встраивается внутрь корпуса функционального устройства. Прогрессивным направлением развития конструкции ЭП, позволяющим повысить их технико-экономические показатели, является объединение в одном устройстве электродвигателя, передаточного механизма, исполнительного механизма и элементов системы управления.
В зависимости от назначения и условий применения электродвигатели в ЭП могут работать в продолжительном, кратковременном и повторно-кратковременном режимах. Для продолжительного режима характерна такая длительность работы, при которой температура электродвигателя достигает установившегося значения. За относительно малый период работы в кратковременном режиме температура электродвигателя не успевает достигнуть установившегося значения. Перерыв в работе исполнительного механизма достаточен для того, чтобы температура двигателя снизилась до температуры окружающей среды. Повторно-кратковременный режим характеризуется рабочим периодом, который чередуется с паузами (остановка или работа в режиме холостого хода), причем ни в один из периодов работы температура электродвигателя не достигает установившегося значения, а во время снятия нагрузки электродвигатель не успевает охладиться до температуры окружающей среды.
Важным показателем повторно-кратковременного режима является отношение времени рабочей части каждого цикла ко всему периоду времени цикла. Этот показатель называется относительной продолжительностью работы ПР или относительной продолжительностью включения ПВ.
Выбор конструктивного исполнения электродвигателя для ЭП производится с учетом отведенного для его размещения пространства, а также условий окружающей среды с целью защиты его от воздействия пыли, влаги, вредных газов, паров топлива, масла, высокой температуры и т.д. При выборе типа электродвигателя для ЭП необходимо учитывать особенности механических характеристик как исполнительного механизма, так и электродвигателя.
Момент Мс сопротивления движению исполнительного механизма зависит исключительно от механических свойств механизма и может быть постоянным, не зависимым от частоты вращения п рабочего органа (или скорости перемещения). Зависимость частоты вращения рабочего органа от момента сопротивления движению называется механической характеристикой исполнительного механизма f=n(Mс).
Вращающий момент электродвигателя, создаваемый взаимодействием магнитного потока возбуждения и силы тока в обмотке якоря, как правило зависит от частоты его вращения. Поскольку от частоты вращения якоря зависит ЭДС, индуктируемая в обмотке, и, следовательно, сила тока, потребляемого электродвигателем. Электродвигатель имеет свою, не зависимую от характеристик исполнительного механизма, механическую характеристику.
Вращающий момент электродвигателя М, определяемый электромагнитными процессами в нем, всегда уравновешивается моментом сопротивления, приложенным к валу электродвигателя со стороны исполнительного механизма. При установившейся частоте вращения вала электродвигателя — это статический момент сопротивления Mс, который складывается из момента, создаваемого полезной нагрузкой и суммарных потерь в исполнительном механизме. При изменении частоты вращения вала nв электродвигателя к моменту Мс добавляется динамическая составляющая, обусловленная изменением кинетической энергии движущихся частей ЭП. Очевидно, что частота вращения вала электродвигателя и скорость перемещения исполнительного механизма установятся такими, при которых моменты на обеих механических характеристиках будут равны.
Частота вращения вала большинства электродвигателей в большей или меньшей степени снижается с увеличением вращающего момента. В зависимости от степени изменения величины пв вращения при различном вращающем моменте механическая характеристика считается более жесткой или более мягкой.
Особенность жесткой механической характеристики — незначительное изменение величины nв при различном вращающем моменте в пределах рабочей части характеристик.
Мягкие механические характеристики электродвигателя отличаются значительным изменением величины nв в зависимости от вращающего момента.
Различают естественную и искусственные характеристики электродвигателей.
Естественная характеристика электродвигателя соответствует основной паспортной схеме его включения и номинальным параметрам напряжения электроснабжения. На естественной характеристике располагается точка номинального режима работы электродвигателя. Естественная механическая характеристика электродвигателя — это лишь одна частная характеристика из бесчисленного множества искусственных характеристик, которые электродвигатель может иметь в статических и динамических режимах работы.
Искусственными характеристиками называются механические характеристики электродвигателя при наличии внешнего сопротивления в цепи якоря при ослабленном магнитном потоке или при изменении подводимого к выводам электродвигателя напряжении. Поскольку эти характеристики получают с целью регулирования силы тока, вращающего момента и частоты вращения вала электродвигателя, то их также называют регулировочными.
Для многих исполнительных механизмов требуется регулирование частоты вращения рабочего органа (или скорости перемещения при поступательном движении рабочего органа). В ЭП регулирование частоты вращения вала электродвигателя обеспечивается в соответствии с задающим сигналом или по заранее заданной программе. Регулировать скорость вращательного или поступательного движения исполнительного механизма можно воздействием на электродвигатель, механическую передачу или на обе составляющие части ЭП одновременно.
Так называемый электрический способ регулирования скорости перемещения рабочего органа исполнительного механизма предусматривает воздействие на электродвигатель при неизмененных параметрах механической передачи. Этот способ получил наибольшее распространение в ЭП благодаря большим регулировочным возможностям, простоте и удобству использования в общей схеме управления ЭП и экономичности. Таким образом, управление движением рабочих органов исполнительных механизмов в большинстве случаев достигается за счет целенаправленного воздействия на электродвигатель при помощи его системы управления с целью получения соответствующих искусственных характеристик.
На рис. 2 приведены естественная механическая характеристика (прямая 1) электродвигателя с возбуждением от постоянных магнитов (с независимым электромагнитным возбуждением) и две искусственные: при введении в цепь якоря добавочного резистора (прямая 2) и уменьшении подводимого к якорю напряжения (прямая 3). Переход на обе искусственные характеристики при моменте нагрузки Мс обеспечивает снижение угловой скорости со вала электродвигателя с электромагнитным возбуждением до требуемого уровня ωн.
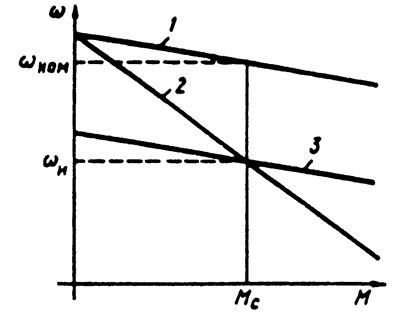
Рис. 2. Естественная и искусственные механические характеристики электродвигателя с возбуждением от постоянных магнитов (с независимым электромагнитным возбуждением): ωном — номинальное значение угловой скорости вала
Стабильность угловой скорости ω, характеризуемая степенью ее изменения при возможных колебаниях момента нагрузки на валу электродвигателя, определяется жесткостью его механической характеристики. Чем больше жесткость характеристики, тем стабильнее величина ω. На рис. 2 большая стабильность угловой скорости обеспечивается при искусственной механической характеристике (прямая 3).
В зависимости от способа воздействия на электродвигатель и вида получаемых искусственных характеристик угловая скорость вала может увеличиваться или уменьшаться в сравнении с работой по естественной характеристике. Увеличение величины ω в электродвигателях с электромагнитным возбуждением может быть обеспечено за счет уменьшения магнитного потока.
При изменении направления действия вращающего момента электродвигателя, например, вследствие изменения направления протекания тока в его обмотках, и сохранении неизменным направления вращения вала якоря электродвигатель переходит на генераторный режим работы. Генераторный режим работы электродвигателя возможен или при замедлении (торможении), когда движение вала в том же направлении поддерживается за счет накопленной ранее кинетической энергии, или при движении за счет каких либо внешних сил, приложенных к ЭП.
Двигательный режим характеризуется тем, что вращение вала электродвигателя в ЭП происходит в направлении действия его вращающего момента. При реверсировании электродвигателя одновременно изменяются и направление действия вращающего момента и направление вращения вала. При этом мощность электродвигателя положительна, следовательно имеет место двигательный режим.
Электродвигатель проектируется таким образом, чтобы, работая на естественной характеристике с номинальными частотой вращения вала, силой тока, вращающим моментом и мощностью, он не нагревался выше определенной температуры, на которую рассчитана его изоляция.
При регулировании частоты вращения вала электродвигатель в ЭП работает на искусственных характеристиках, т.е. в условиях отличных от указанных в паспорте. Поэтому для сохранения нормативного срока службы нагрузка электродвигателя должна быть такой, при которой в нем протекает ток, сила которого не выше номинального значения. Такая нагрузка называется допустимой: для одной группы двигателей она равна номинальному моменту, а для другой — номинальной мощности электродвигателя. Следует отметить, что степень нагрева электродвигателя при номинальном значении силы тока определяется не только нагрузкой по моменту и мощности, но условиями его охлаждения (наличием вентиляции).
Для выбора наиболее рационального вида регулируемого ЭП используются различные технико-экономические показатели: капитальные затраты на изготовление, эксплуатационные расходы, срок окупаемости, надежность, удобство и простота в эксплуатации, серийность и унификация средств управления и т.д. В результате анализа всех возможных вариантов выявляется экономически обоснованное решение.
Заметки автолюбителя: из чего состоит привод зеркал заднего вида
Электрический привод делает зеркало заднего вида практичным и быстро настраиваемым обзорным элементом. Благодаря электроприводу, водителю не нужно открывать окно или выходить с машины, чтобы отрегулировать зеркальный элемент. Достаточно просто нажать кнопку в салоне. В этой статье мы расскажем, как устроен электропривод, как он работает и что чаще всего приводит к его поломке.
Устройство электропривода
Зеркало для автомобиля с электрическим приводом было запатентовано ещё в 1975 году. Конструкция привода было простой и эффективной. С тех пор строение электромеханического устройства практически не изменилось.
Каждый производитель вносит свои корректировки, существуют даже отдельные запатентованные устройства, но их принцип работы остается прежним.

Если мы возьмем стандартное боковое зеркало ГАЗель с электроприводом и повторителем поворота, конструкция привода будет следующей.
Из чего состоит привод:
- Электромеханическое устройство помещено в герметичный корпус, который защищён от проникновения влаги и пыли.
- Внутри расположены два миниатюрных электромотора, которые и приводят всю систему в движение.
- Из корпуса выдвигается два штока и поворачивают по горизонтали и вертикали подвижную круглую тарелку.
- Зеркальный элемент крепится к тарелке, поэтому при её поворотах меняется угол наклона зеркальной поверхности.
Таким образом механизм конструкции трансформирует радиальное движение вала электрического двигателя в линейное продвижение штоков. Особенности кинематики могут меняться у разных производителей. К примеру, боковое зеркало на авто Газель Next производства компании Автокомпонент и зеркальный элемент на ВАЗ 2110, 2111, 2112 бренда АПТ укомплектованы электроприводами с различной конструкцией, но в них реализован одинаковый принцип работы классического линейного привода.

Комплектация электропривода
И боковое, и салонное зеркало заднего вида комплектуется самыми простыми двигателями миниатюрных размеров. Такие коллекторные двигатели с упрощённой конструкцией устанавливаются даже в детских игрушках.
Для своего авто вы также можете купить зеркало заднего вида с эффектом памяти. Зеркальный элемент комплектован резисторами, которые конструктивно связываются со штоками. Во время движения штоков изменяется и сопротивление резисторов. Электронная часть системы фиксирует и запоминает показатель сопротивления. При автоматической установке двигатель просто работает до достижения установленного уровня сопротивления резистора. При этом зеркало автомобильное принимает необходимое положение.

Почему может сломаться электропривод
Благодаря упрощённой конструкции зеркало заднего вида салонное и боковое сложно сломать. Для механизмов безопасна работа «до упора». В них установлена «лепестковая» гайка. В отличие от стандартной детали, работа «до упора» не приводит к повреждению резьбы.
Зеркало заднего вида с навигатором и электроприводом не боится и низких температур. Примерзания зеркального элемента в кожухе также не вызовет поломки, благодаря простоте и эффективности механизма.

Единственное, что может погубить электрический привод – это вода. Электроника надёжно защищена гофрированным пыльником из резины и зеркало не боится даже направленного из шланга потока воды. Но эта деталь со временем покрывается трещинами и выходит из строя. В результате зеркальный элемент начинает хуже выполнять команды электронного блока.
Ремонтировать зеркальный элемент нецелесообразно. В случае поломки гораздо проще приобрести новое зеркало.
Современное автомобилестроение. Электромобили — срыв покровов

Если задать этот вопрос, то с очень высокой вероятностью одна часть отвечающих назовёт таким компонентом силовую батарею. Оставшаяся часть в качестве ответа приведёт электродвигатель.
И обе стороны окажутся неправы.
Необходимое предисловие
Как и многое на нашей планете, изнутри вселенная автомобилестроения в общем и электромобиля в частности выглядит несколько иначе, чем видится стороннему наблюдателю на первый взгляд.
Заранее подчёркиваю: все утверждения и описания в последующем тексте не стоит рассматривать как полнейшие и всеобъемлющие.
Наоборот — многое здесь осознанно упрощено и сведено к обобщению для максимального охвата аудитории. Раз уж берёмся за разумное, доброе и вечное, то сеять — так, значит, сеять щедрыми жменями!
Покатились! (привет, Гётеборг!)
Электропривод: ху из ху, и чьё ху длиннее
В разработке электропривода для электромобилей есть одно интересное соотношение.
По сложности компонентов в общей (упрощённой!) схеме электропривода — батарейная экосистема/инвертор/электродвигатель — ресурсозатраты в процентах будут представляться примерным соотношением 20% / 70% /10%.
Конечно, не хотелось бы ни в коем случае преуменьшать значение батареи и электродвигателя — но по количеству составляющих и по функциональности они проще и гораздо менее «айтишнее», чем преобразователь напряжения.
Дело в том, что современный инверторный преобразователь — это по сути промышленная embedded-система с операционной системой реального времени (RTOS), с суровыми требованиями по: наработке на отказ, по требованиями функциональной и пассивной безопасности, по пыле-/влагозащищённости, по надёжности коммуникации, по быстродействию, по автономности, по условиям работы в состоянии вибрации и температурным нагрузкам, по защищённости от электромагнитных воздействий и много-много чего ещё — и оно к тому же преобразовывает весьма мощные энергетические потоки, на которых, в случае, например, «Теслы», можно качественно прожарить и вкусно приготовить молодого бычка.
Пару слов о гибридных авто
Сразу оговорюсь: тема электромобильности сейчас снова бурно развивается во все стороны после некоторого затишья в 2014-2016 годах (новый виток интереса от всех участников + явный интерес правительств + дизельгейт + рывок в батареях и т.д.).
Поэтому классификации и термины регулярно подправляются/расширяются/дополняются и просто — «радостно обогащаются» маркетологами.
Но в общем классическом виде вполне можно утверждать, что гибрид — это конфигурация, где авто имеет полноценный ДВС, приводящий одну (или более 🙂 ось, дополнительно к которому для выдачи реального момента действует электропривод (батарея + инвертор + электромашина).
И здесь существует куча подмножеств.
В зависимости от того, как электромашина поддерживает ДВС, она может:
- Сидеть прямо на оси ДВС-поршней и поддерживать её момент напрямую — а потом этот «усиленный» момент через коробку передач классически отводится уже на приводимую ось(-и).
- Может быть заведён (скорее всего через относительно простой дифференциал) на приводимую от ДВС колёсную ось уже за коробкой передач и поддерживать момент на оси непосредственно.
- Может сидеть механически отдельно от ДВС на другой оси, тогда ДВС приводит (чаще всего) переднюю ось, а электропривод — заднюю ось.
Но такие вот «классические» гибриды, у которых есть внешние интерфейсы (гнёзда для штекеров) для зарядки от зарядных станций — они обычно и называются plug-in hybrid.
Подчеркну — по моему скромному мнению сюда достаточно неверно относить электромобили с range extender, ибо ДВС в них не несёт момент ни на одну из осей — и обычно маленький и не мощный. Но юридически циркуляром Евросоюза они также относятся к гибридным электрическим транспортным средствам.
Гибрид — электромобиль или тварь дрожащая?
По уже вполне сложившейся традиции, да и исходя из юридической практики — под определением «электромобили» я бы советовал всем читающим понимать не только «чистое электроприводное решение», но и все варианты гибридных версий электрифицированных транспортных средств.
Всё потому, что с инженерной точки зрения нет абсолютно никакой принципиальной разницы в обобщённой стурктуре электропривода, если автомобиль имеет на борту любого размера силовую электробатарею, силовой инвертор (описанный выше) и электрическую машину.
Процессы, происходящие в электроприводе, будут практически всегда одинаковы.
Мало того — в автомобилях с водородными топливными ячейками для приведения транспорта в движение используется та же самая комбинация: силовая электробатарея + инвертор + электромашина. Просто силовой аккумулятор запитывается здесь не от ДВС или зарядной станции, а от топливного элемента.
Сравнение топологий «чистый ДВС» vs. «чистый электромобиль»
Последующее утверждение зависит, конечно, от конкретно взятой модели, но достаточно точно и в общем можно утверждать следующее.
- ДВС + стартер-генератор + MCU (ЭБУ двигателя и стартер-генератора) + коробка передач + GCU (ЭБУ коробки передач / gear box / Getriebe) + жидкостная система охлаждения ДВС.
- Инвертор + электродвигатель + дифференциал (или что-то вроде, достаточно простое механически) + жидкостная система охлаждения батареи-И-инвертера-И-электродвигателя (да, обязательно все три устройства) + BCU (ЭБУ батареи) + AC/DC-конвертер/выпрямитель (он же зарядный конвертер для зарядки от «домашней» розетки или «обычной» зарядки) + опционально DC/DC-конвертер (для запитки всей внутренней слаботочной сети электроники 12/24/48 вольт).
От классического свинцово-кислотного аккумулятора на 12 вольт пока никто не отказывается по очень многим причинам. Немного подробностей от разработчика maybe_im_a_leo вот здесь.
- На потенциальные споры: когда высчитывают КПД всей цепочки «батарея-инвертор-электродвигатель» в сравнении с ДВС — часто забывают о необходимости учёта рекуперации, повышающей общий КПД электропривода.
- Если мы говорим о «полноприводных» версиях EV с электромотором на каждую ось (т.е. минимум 2 штуки электродвигателей в автомобиле), то в общем случае там будет и минимум два инвертора — по инвертору на каждую комбинацию двигатель-ось.
- Уже несколько десятилетий при торможении двигателем в ДВС при высоких значениях оборотов вала отключается зажигание топливной смеси («свечи не горят») — что при долгом движении с горки при пересчёте на 100 км увеличивает КПД для ДВС-авто. Хотя грубая прикидка, конечно же, явно показывает, что при равных внешних «с горочных» условиях относительное увеличение КПД от рекуперации в EV всё же в несколько раз выше относительного увеличения КПД от «гашения свечей» в ДВС.
- EV в среднем требует гораздо больше высококачественной меди и редкоземельных материалов, чем ДВС-авто. Фактор «в несколько раз больше редкоземельных материалов» особенно заметен, если EV приводится в движение синхронными электродвигателями — а это, всё-таки, почти все массовые электромобили и гибриды, кроме пары уже выпущенных в серию Мерседесов и кроме всех базовых комплектаций Тесл. При этом, однако, в «прокачанной» версии Model 3 один из дополнительных двигателей тоже синхронный.

Бесстыдно обнажённая Tesla в шоуруме компании, центр г. Нюрнберг.

Передний мост голой модели. «Wechselrichter» (справа вверху) — это именно обсуждаемый инвертор
Мы заряжаем или нас заряжают
Использование электромобилей (по крайней мере в их «чистом» варианте без ДВС) невозможно без заряжания оных.
Что происходит, как нетрудно догадаться, не только с помощью штекеров, беспощадно подключаемых к зарядным гнёздам транспортного средства, но и посредством соответствующей инфраструктуры. И инфраструктура сия — это не только красивые зарядные столбы, один из вариантов которых можно наблюдать на трогательной иллюстрации ниже, но и многое, очень многое иное.

Здесь сделаем небольшую ремарку.
Конечно же, если речь идёт о зарядном процессе «из домашней розетки», то там всё вполне просто. Пользователь берёт соответствующий кабель, одним штекером вонзает его в классическую домашнюю однофазную розетку, а другим — в разъём в автомобиле. И зарядный ток, радуясь полученной свободе, классически медленно и неотвратимо течёт по проводам.
(и снова-снова радостно упрощаем, ибо даже такая «простая» штука, как розетка, таит в себе много чего интересного, о чём можно почитать, например, вот здесь у пользователя idiv )
Но в общем для суперчарджеров и универсальных многоинтерфейсных зарядных станций (с несколькими стандартами коннекторов) требуется ещё такой себе немаленький шкаф с силовой электроникой (в реальности там не только силовая электроника, а всё ещё сложнее — привет, idiv и lingvo 🙂 — а ещё во многих случаях (особенно для мест с несколькими зарядными столбами и/или суперчарджерами) требуется отдельная подводящая линия электропередач и трансформаторная подстанция. Это всё — место, место, место…
А ещё верная статья от товарища marks и много уже дополнительно проведённых исследований.
Для примера: если не позаботиться о модернизации электросетей, то уже при нынешнем темпе развития событий даже такой экономически развитый регион как округ «большого Мюнхена» через 3 года начнёт испытывать уютные локальные блэкауты.
О небывалой революционности текущего момента
Каждый раз, когда в этих наших инновационных интернетах ещё раз воздаётся хвала революционности современного емобильного хайпа, автор идёт на кухню и готовит себе чашку душистого чая.
После чего зачёрпывает малую толику кумкватового варения, берёт заваренный ароматный напиток и садится за расслабленное чтение.
Объектом литературного интереса здесь выступает исследование электромобильного транспорта, проводившееся Рейнско-Вестфальским техническим университетом Ахена (знаменитый RWTH) по заказу немецкого Объединения автомобильной промышленности (VDA). Группа научных сотрудников рассматривала и анализировала уже вополощённые в металл исследовательские и серийные автомобильные транспортные средства, а также рассматривала весь спектр как уже имеющихся; так и только ещё изучаемых соответствующих технологий.
Электронная версия книги доступна по ссылке на сайте VDA.
Очень, ну просто очень интересная работа, изданная в октябре 1993 года.
О теории электропривода
Желающим глубже ознакомиться с темой электропривода в общем и вопросами его регулирования в частности можно посоветовать… статьи на Хабре.
Нет, не так: нужно настойчиво рекомендовать в первую очередь ознакомиться с великолепнейшим циклом статей от BelerafonL по теории электропривода.
А когда первичный голод будет утолён — рекомендуется ознакомиться с трилогией о разработке для БелАЗа.
И при чтении этих статей вспоминать, что в общем-то процесс и общие решения возникающих вопросов при разработке автомобилей (любых, а не только электрических) у ведущих автопроизводителей происходят в общем-то примерно так же.
И потому статьи эти дают больше, чем просто взгляд на разработку «под БелАЗ».
Делаем паузу
На сегодня прервёмся.
А напоследок хотелось бы напомнить/заметить, что в текущем сообществе:
- товарищ LittleSquirrel имеет огромный практический опыт по разработке современных робомобилей (да-да, именно ADAS — и если восторженный читатель очень-очень вежливо его попросит… :);
- товарищ maybe_im_a_leo трудится на ниве разработки силовой электроники у одного, достаточно часто упоминаемого на Хабре, автопроизводителя 😉 ;
- товарищ teymurberman очень давно работает в самых глубинах embedded-кода немецкой автомобильной промышленности (teymurberman — было прикольно найти твой аккаунт за минуту во время стояния в очереди в кассу 🙂
- товарищ parakhod обладает массой знаний по хитрым стендам моделирования для европейской автомобильной промышленности в частности — и embedded-разработке для оной промышленности в общем;
- товарищ nad_oby в своё время до покупки их «Интелом» работал в «Mobileye» (компьютерное зрение) — но самое интересное ему, наверное, рассказывать низзя;
- товарищ old_gamer недавно самоотверженно катался для всех на «Тесле» — и интересны апдейты, шо оно там, и как;
- товарищ mrKron опубликовал немало статей, связанных одновременно с IoT и автомобильной тематикой;
- за вдохновение в стилистике написания статей отдельное спасибо товарищам Boomburum, Milfgard и Meklon! =D
К моменту публикации на написание статьи было потрачено достаточно много времени (см. индекс-адрес и привет DmitrySpb79 🙂 — но даже так в текст вошла только малая доля того, с чего можно и нужно сорвать простыню недосказанности.
И, наверное, статья будет ещё дополняться в течение последующего времени.
Посему — до новых встреч. И когда-нибудь мы с вами ещё поговорим, чем же так важны и могущественны автопоставщики, а не только OEM. 😉