Что такое ШИМ: широтно-импульсная модуляция
Инверторы, преобразователи, схемы SMPS и контроллеры скорости… Все эти схемы объединяет то, что они состоят из множества электронных переключателей внутри. Эти переключатели представляют собой не что иное, как силовые электронные устройства, такие как MOSFET, IGBT, TRIAC и т. Д. Для управления такими силовыми электронными переключателями мы обычно используем так называемые сигналы PWM (широтно-импульсная модуляция). Помимо этого, сигналы PWM также используются для управления серводвигателями, а также для других простых задач, таких как управление яркостью светодиода.
В нашей предыдущей статье мы узнали об АЦП, а АЦП используется для чтения аналоговых сигналов с помощью цифрового устройства, такого как микроконтроллер. ШИМ можно рассматривать как полную противоположность ему, ШИМ используется для создания аналоговых сигналов от цифрового устройства, такого как микроконтроллер. В этой статье мы узнаем о том, что такое сигналы ШИМ, ШИМ и некоторые параметры, связанные с ними, чтобы мы были уверены в их использовании в наших проектах.
Что такое ШИМ (широтно-импульсная модуляция)?
ШИМ расшифровывается как широтно-импульсная модуляция; мы рассмотрим причину такого названия позже. Но пока понимайте PWM как тип сигнала, который может быть произведен цифровой ИС, такой как микроконтроллер или таймер 555. Созданный таким образом сигнал будет иметь последовательность импульсов, и эти импульсы будут иметь форму прямоугольной волны. То есть в любой данный момент времени волна будет либо высокой, либо низкой. Для простоты понимания давайте рассмотрим сигнал ШИМ 5 В, в этом случае сигнал ШИМ будет либо 5 В (высокий), либо на уровне земли 0 В (низкий). Продолжительность, в течение которой сигнал остается на высоком уровне, называется « временем включения », а продолжительность, при которой сигнал остается на низком уровне, называется « временем выключения ».
Для сигнала ШИМ нам нужно посмотреть на два важных параметра, связанных с ним: один — это рабочий цикл ШИМ, а другой — частота ШИМ.
Рабочий цикл ШИМ
Как было сказано ранее, сигнал ШИМ остается включенным в течение определенного времени, а затем остается выключенным до конца этого периода. Что делает этот сигнал ШИМ особенным и более полезным, так это то, что мы можем установить, как долго он должен оставаться включенным, контролируя рабочий цикл сигнала ШИМ.
Процент времени, в течение которого сигнал ШИМ остается ВЫСОКИМ (по времени), называется рабочим циклом. Если сигнал всегда включен, это 100% рабочий цикл, а если он всегда выключен, это 0% рабочего цикла. Формулы для расчета рабочего цикла показаны ниже.
Рабочий цикл = время включения / (время включения + время выключения)
Следующее изображение представляет сигнал ШИМ с рабочим циклом 50%. Как видите, учитывая весь период времени (время включения + время выключения), сигнал ШИМ остается включенным только в течение 50% периода времени.
Частота = 1 / Период времени Период времени = Время включения + Время выключения
Обычно сигналы ШИМ, генерируемые микроконтроллером, составляют около 500 Гц, такие высокие частоты будут использоваться в высокоскоростных коммутационных устройствах, таких как инверторы или преобразователи. Но не все приложения требуют высокой частоты. Например, для управления серводвигателем нам необходимо генерировать сигналы ШИМ с частотой 50 Гц, поэтому частота сигнала ШИМ также может управляться программой для всех микроконтроллеров.
Некоторые часто возникающие вопросы по ШИМ
В чем разница между рабочим циклом и частотой сигнала ШИМ?
Часто путают рабочий цикл и частоту сигналов ШИМ. Как мы знаем, сигнал ШИМ представляет собой прямоугольную волну с определенным временем включения и выключения. Сумма этого на время и время выключения называется один период времени. Значение, обратное одному периоду времени, называется частотой. В то время как количество времени, в течение которого сигнал ШИМ должен оставаться включенным в один период времени, определяется рабочим циклом ШИМ.
Проще говоря, скорость включения и выключения сигнала ШИМ определяется частотой сигнала ШИМ, а на этой скорости, как долго сигнал ШИМ должен оставаться включенным, определяется рабочим циклом сигнала ШИМ.
Как преобразовать сигналы ШИМ в аналоговое напряжение?
Для простых приложений, таких как управление скоростью двигателя постоянного тока или регулировка яркости светодиода, нам необходимо преобразовать сигналы ШИМ в аналоговое напряжение. Это легко сделать с помощью RC-фильтра и обычно используется там, где требуется функция ЦАП. Схема для того же показана ниже

На приведенном выше графике желтый цвет — это сигнал ШИМ, а синий — выходное аналоговое напряжение. Значение резистора R1 и конденсатора C1 можно рассчитать на основе частоты сигнала ШИМ, но обычно используются резистор 5,7 кОм или 10 кОм и конденсатор 0,1 или 1 мк.
Как рассчитать выходное напряжение сигнала ШИМ?
Выходное напряжение ШИМ-сигнала после его преобразования в аналоговый будет в процентах от рабочего цикла. Например, если рабочее напряжение составляет 5 В, то сигнал ШИМ также будет иметь значение 5 В. В таком случае для 100% рабочего цикла выходное напряжение будет 5 В, для 50% рабочего цикла это будет 2,5 В.
Выходное напряжение = рабочий цикл (%) * 5
Примеры:
Ранее мы использовали ШИМ с различными микроконтроллерами во многих наших проектах:
Что такое ШИМ? Как широтно-импульсная модуляция используется в автоматизации?
Широтно-импульсная модуляция, или PWM (pulse-width modulation) — это тип цифрового сигнала, который модулируется для управления мощностью, скоростью и/или положением устройств в автоматизированной системе.
PWM работает путем создания серии импульсов включения и выключения, которые подаются на устройство, при этом время включения или рабочий цикл импульса определяет количество подаваемой мощности.
 Для чего используется?
Для чего используется?
Широтно-импульсная модуляция может быть использована для множества различных применений, включая управление двигателями, регулировку яркости освещения и даже управление источниками питания.
Сигнал, промодулированный по ширине импульса, также может применяться для регулирования скорости двигателей или других устройств без изменения уровня напряжения. Таким образом, ШИМ становится идеальным вариантом для управления широким спектром устройств в системах автоматизации.
Принцип работы
Принцип работы ШИМ-сигнала заключается в посылке регулярных импульсов через определенные интервалы времени с изменяющимся рабочим циклом (процентное соотношение времени «включения»).
В зависимости от рабочего цикла на управляемое устройство подается больше или меньше энергии, что влияет на его скорость или положение в автоматизированной системе.
Путем увеличения или уменьшения определенных параметров, таких как частота, амплитуда и длительность импульсов, эти параметры могут быть настроены в соответствии с любыми требованиями приложения и обеспечивают точный контроль над выходом устройства без изменения уровня напряжения.
Широтно-импульсная модуляция является важным и широко используемым методом управления выходной мощностью в различных приложениях. Она может быть реализована с помощью цифровых или аналоговых систем управления.
В цифровом варианте сигналы генерируются с помощью программных алгоритмов, которые определяют ширину импульсов; в то время как в аналоговом PWM сигналы генерируются аппаратными компонентами, такими как транзисторы и конденсаторы, которые создают желаемую ширину импульсов без необходимости программирования. Оба метода имеют свои преимущества и недостатки, но при правильной реализации оба обеспечивают надежную работу с низким уровнем искажений.
Как работает ШИМ-контроллер в источнике питания?
ШИМ-контроллер работает путем переключения между различными уровнями электрического тока в зависимости от того, какой тип выхода требуется от системы, которую он питает — постоянный ток (DC) или переменный ток (AC).
Контроллер регулирует это переключение с помощью широтно-импульсной модуляции, которая посылает регулярные импульсы через определенные промежутки времени с различными рабочими циклами (процентное время «включения»).
Таким образом, различные уровни энергии могут подаваться к любому устройству, нуждающемуся в ней, сохраняя при этом стабильность системы в целом — т. е. без электрических скачков, которые могут повредить компоненты в дальнейшем.
Применение широтно-импульсной модуляции
Широтно-импульсная модуляция имеет множество вариаций по практическому использованию в различных отраслях промышленности, таких как авиация, автомобилестроение, робототехника и т. д.
Некоторые возможности применения ШИМ-сигнала: управление скоростью и положением двигателя, регулирование яркости света, регулирование напряжения переменного и постоянного тока, обеспечение регулируемых профилей ускорения и замедления для двигателей, снижение электромагнитных помех, обеспечение точной передачи сигналов на большие расстояния и т. д..
Данный вид модуляции является бесценным инструментом, когда речь идет о системах автоматизации, требующих точного контроля над своими выходами без ущерба для стабильности в целом.
Применение широтно-импульсной модуляции в автоматизации
 В системах автоматизации широтно-импульсная модуляция имеет множество преимуществ благодаря своей способности точно регулировать выходные параметры, не оказывая слишком сильного влияния на уровень напряжения.
В системах автоматизации широтно-импульсная модуляция имеет множество преимуществ благодаря своей способности точно регулировать выходные параметры, не оказывая слишком сильного влияния на уровень напряжения.
Управляющие ШИМ-сигналы широко используется во многих типах машин, включая роботизированные манипуляторы и роботизированные транспортные средства, а также бытовую технику, такую как стиральные машины, духовые шкафы и т. д..
Широтно-импульсная модуляция часто используется для получения синусоидальной формы волны. Она также может быть использована для регулирования работы инвертора.
Помимо автоматической регулировки скорости и положения двигателя с помощью цифровых сигналов, они также обеспечивают регулируемые профили ускорения и замедления, что делает их идеальными при работе с хрупкими компонентами, где необходимо избегать резких изменений.
Среди других преимуществ — снижение электромагнитных помех, повышение эффективности, усиление мер безопасности благодаря надежным методам обнаружения неисправностей, большая точность при передаче сигналов на большие расстояния и многое другое.
В заключение следует отметить, что широтно-импульсная модуляция — это метод контроля и регулирования количества энергии, подаваемой на устройство, путем изменения ширины электрического импульса. Данный метод применяется в автоматизации и робототехнике, от управления двигателями до обеспечения точного контроля над системами освещения. PWM способен обеспечить точное регулирование при минимальных потерях энергии по сравнению с традиционными методами.
В каталоге UnitMC вы найдете актуальные устройства и системы АСУ ТП. Подробную информацию и консультацию можно получить у наших сотрудников.
информация о компании
Основное направление нашей деятельности — поставка оборудования и комплектующих для сборки автоматических производственных линий. Мы работаем с любыми сферами и предлагаем продукцию отличного качества по выгодной стоимости. У нас вы можете заказать как крупнооптовую, так и мелкооптовую партию оборудования.
Контактная информация
Каталог
информация
© UnitMC 2023. Все права защищены.
Быстрый заказ
Свяжитесь с нашей службой поддержки клиентов, если у Вас есть какие-либо вопросы.
Свяжитесь с нами
Свяжитесь с нашей службой поддержки клиентов, если у Вас есть какие-либо вопросы.
Свяжитесь с нами
Свяжитесь с нашей службой поддержки клиентов, если у Вас есть какие-либо вопросы.
Свяжитесь с нами
Свяжитесь с нашей службой поддержки клиентов, если у Вас есть какие-либо вопросы.
Оставить заявку
Соглашение об обработке персональных данных
В целях соблюдения 152-ФЗ
«о защите персональных данных»
Присоединяясь к настоящему Соглашению и оставляя свои данные на Сайте unitmc.ru (далее – Сайт), путем заполнения полей форм обратной связи Пользователь:
- подтверждает, что все указанные им данные принадлежат лично ему,
- подтверждает и признает, что им внимательно в полном объеме прочитано Соглашение и условия обработки его персональных данных, указываемых им в полях форм обратной связи, текст соглашения и условия обработки персональных данных ему понятны;
- дает согласие на обработку Сайтом предоставляемых в составе информации персональных данных в целях заключения между ним и Сайтом настоящего Соглашения, а также его последующего исполнения;
- выражает согласие с условиями обработки персональных данных без оговорок и ограничений.
Пользователь дает свое согласие на обработку его персональных данных, а именно совершение действий, предусмотренных п. 3 ч. 1 ст. 3 Федерального закона от 27.07.2006 N 152-ФЗ «О персональных данных», и подтверждает, что, давая такое согласие, он действует свободно, своей волей и в своем интересе. Согласие Пользователя на обработку персональных данных является конкретным, информированным и сознательным.
Настоящее согласие Пользователя признается исполненным в простой письменной форме, на обработку следующих персональных данных: фамилии, имени, отчества; года рождения; места пребывания (город, область); номеров телефонов; адресов электронной почты (E-mail).
Пользователь, предоставляет unitmc.ru право осуществлять следующие действия (операции) с персональными данными: сбор и накопление; хранение в течение установленных нормативными документами сроков хранения отчетности, но не менее трех лет, с момента даты прекращения пользования услуг Пользователем; уточнение (обновление, изменение); использование; уничтожение; обезличивание; передача по требованию суда, в т.ч., третьим лицам, с соблюдением мер, обеспечивающих защиту персональных данных от несанкционированного доступа.
Указанное согласие действует бессрочно с момента предоставления данных и может быть отозвано Вами путем подачи заявления администрации сайта с указанием данных, определенных ст. 14 Закона «О персональных данных». Отзыв согласия на обработку персональных данных может быть осуществлен путем направления Пользователем соответствующего распоряжения в простой письменной форме на адрес контактной электронной почты указанной на сайте unitmc.ru
Сайт не несет ответственности за использование (как правомерное, так и неправомерное) третьими лицами Информации, размещенной Пользователем на Сайте, включая её воспроизведение и распространение, осуществленные всеми возможными способами. Сайт имеет право вносить изменения в настоящее Соглашение. При внесении изменений в актуальной редакции указывается дата последнего обновления. Новая редакция Соглашения вступает в силу с момента ее размещения, если иное не предусмотрено новой редакцией Соглашения. Ссылка на действующую редакцию всегда находится на страницах сайта: unitmc.ru
К настоящему Соглашению и отношениям между пользователем и Сайтом, возникающим в связи с применением Соглашения подлежит применению право Российской Федерации.»
Что такое ШИМ — широтно-импульсная модуляция?
Это современный метод управления уровнем мощности подаваемой к нагрузке, заключающийся в изменении продолжительности импульса при постоянной частоте их следования. Это технология модуляции сигнала за счет вариативного изменения ширины импульсов, а не выходного напряжения. ШИМ преобразователь может быть аналоговый, цифровой и пр.
Широтно-импульсная модуляция — важнейшие параметры:
- Т -период тактирования — промежутки времени, через которые подаются импульсы.
- Длительность импульса — время пока подается сигнал.
- Скважность — рассчитанное по формуле соотношение длины импульса к импульсному Т периоду тактирования.
- D коэффициент заполнения — показатель обратный скважности.
Область применения
Применение ШИМ позволяет увеличить и намного коэффициент полезного действия электрических преобразователей. Тем более это относится к импульсным преобразователям, которые сегодня преимущественно применяются во вторичных источниках питания разных электронных аппаратов. Импульсные преобразователи обратноходовые, прямоходовые 1-тактные, 2-тактные, полумостовые, резонансные управляются с участием ШИМ.
Принцип ШИМ сегодня стал основным для электронных устройств, которым требуется поддержание на заданном уровне выходных параметров и их регулировка. Метод применяется для изменения скорости вращения двигателей, яркости света, управления силовым транзистором БП импульсного типа.
Используется ЩИМ модуляция и в системах управления яркостью светодиодов. Светодиод, благодаря низкой инерционности, успевает мигнуть на частоте всего в несколько десятков кГц. Для человеческого глаза работа светодиода в импульсном режиме воспринимается как свечение. Яркость светодиода зависит от продолжительности импульса в течение одного периода. При коэффициенте заполнения в 50%, то есть, если время свечения равно времени паузы, яркость светодиода составляет одну вторую номинальной величины. Когда появились светодиодные лампы 220В, нашлась проблема повышения их надёжности при нестабильном входном напряжении. Задача была решена разработкой драйвера питания, функционирующего по принципу ШИМ.
Распространение устройств, функционирующих по принципу ШИМ, позволило уйти от линейных трансформаторных БП. В результате чего повысилось КПД и уменьшились масса и габариты источников питания. Поэтому сегодня ШИМ-контроллер является сегодня неотъемлемой частью импульсного БП. Он управляет силовым транзистором и напряжение на выходе блока питания всегда остаётся стабильным. Кроме этого, ШИМ-контроллер:
- обеспечивает плавный пуск преобразователя;
- ограничивает скважность и амплитуду управляющих импульсов;
- контролирует входное напряжение;
- защищает от КЗ силового ключа;
- в аварийной ситуации переводит устройство в деж. режим.
Сегодня широтно-импульсная модуляция применяется повсеместно и позволяет управлять яркостью подсветки ЖК дисплеев мобильных телефонов, смартфонов, ноутбуков. Реализована микросхема ШИМ в сварочных аппаратах, в автоинверторах, в зарядных устройствах и пр. В любом зарядном устройстве используется сегодня ШИМ.

Принцип работы ШИМ
Сигнал, промодулированный по ширине импульса, формируется двумя способами:
- аналоговым;
- цифровым.
При аналоговом способе создания ШИМ-сигнала несущая в виде пилообразного или треугольного сигнала подается на инвертирующий вход компаратора, а информационный – на неинвертирующий. Если мгновенный уровень несущей выше модулирующего сигнала, то на выходе компаратора ноль, если ниже – единица. На выходе получается дискретный сигнал с частотой, соответствующей частоте несущего треугольника или пилы, и длиной импульса, пропорциональной уровню модулирующего напряжения.
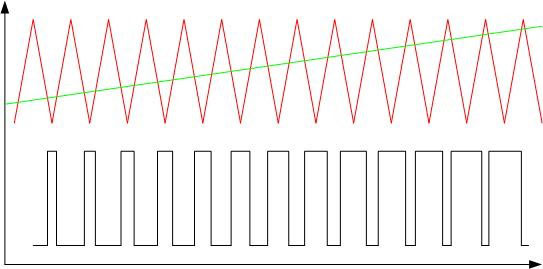
В качестве примера приведена модуляция по ширине импульса треугольного сигнала линейно-возрастающим. Длительность выходных импульсов пропорциональна уровню выходного сигнала.
Аналоговые ШИМ-контроллеры выпускаются и в виде готовых микросхем, внутри которых установлен компаратор и схема генерации несущей. Имеются входы для подключения внешних частотозадающих элементов и подачи информационного сигнала. С выхода снимается сигнал, управляющий мощными внешними ключами. Также имеются входы для обратной связи – они нужны для поддержания установленных параметров регулирования. Такова, например, микросхема TL494. Для случаев, когда мощность потребителя относительно невелика, выпускаются ШИМ-контроллеры со встроенными ключами. На ток до 3 ампер рассчитан внутренний ключ микросхемы LM2596.
Цифровой способ осуществляется применением специализированных микросхем или микропроцессоров. Длина импульса регулируется внутренней программой. Во многих микроконтроллерах, включая популярные PIC и AVR, «на борту» имеется встроенный модуль для аппаратной реализации ШИМ, для получения PWM-сигнала надо активировать модуль и задать параметры его работы. Если такой модуль отсутствует, то ШИМ можно организовать чисто программным методом, это несложно. Этот способ дает более широкие возможности и предоставляет больше свободы за счёт гибкого использования выходов, но задействует большее количество ресурсов контроллера.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
- амплитуда (U);
- частота (f);
- скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
- Чем выше частота, тем выше точность регулирования.
- Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
- Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются. Поэтому для построения ключей важно использование быстродействующих элементов.
- При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
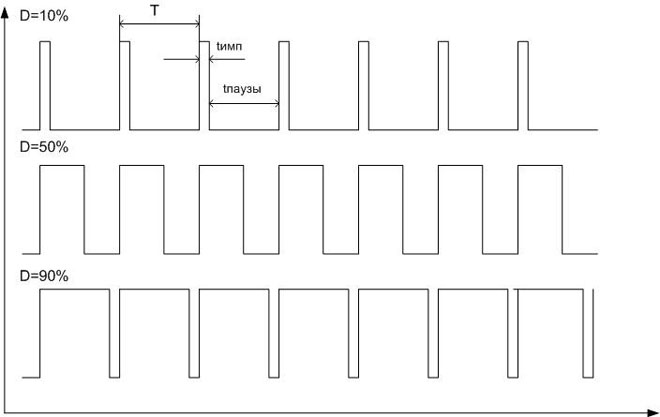
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f). Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
В чём отличия ШИМ от ШИР
В зарубежной технической литературе нет отличия между широтно-импульсной модуляцией и широтно-импульсным регулированием (ШИР). Российские же специалисты эти понятия пытаются разграничить. На самом деле ШИМ – это вид модуляции, то есть изменения несущего сигнала под действием другого, модулирующего. Несущий сигнал выполняет роль переносчика информации, а модулирующий задает эту информацию. А широтно-импульсное регулирование – это регулирование режима нагрузки с помощью ШИМ.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
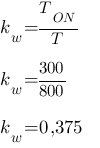
Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:

Инвертор 12 В/ 220 ВИнвертор с чистой синусоидой, может обеспечивать питание переменно…Подробнее

Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:
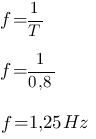
Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
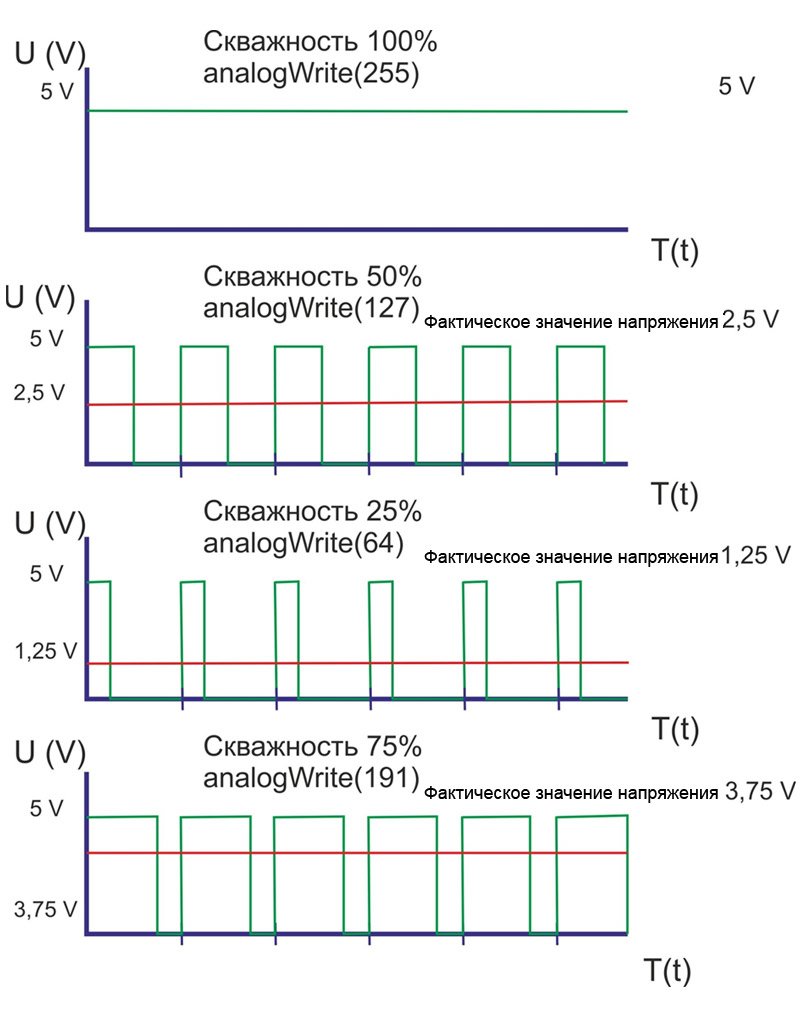
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:
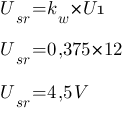
В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Для сглаживания всплесков питания между клеммами двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555. Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Что такое шим контроллер. Схема, принцип работы и управление шим контроллера
ШИМ (широтно-импульсная модуляция, англ. pulse—widthmodulation (PWM)) — это способ управления мощностью путём импульсной подачи питания. Мощность меняется в зависимости от длительности подаваемых импульсов.
ШИМ в современной электронике применяется повсеместно, для регулировки яркости подсветки вашего смартфона, скорости вращения кулера в компьютере, для управления моторами квадрокоптера или гироскутера. Cписок можно продолжать бесконечно.
В любительской электронике ШИМ контроллеры часто используются для управления яркостью светодиодных лент и для управления мощными двигателями постоянного тока.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).

Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей “затвор – исток” и “затвор – сток”. Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.

Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Важные страницы
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макро, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
5 / 5 ( 2 голоса )
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
 В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.

При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.

Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
Обзор типичных схем
Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Как известно, ШИМ имеет постоянную амплитуду импульсов. Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Второй вариант аналогичен первому. Единственное отличие, что в качестве задающего генератора используется операционный усилитель. Этот компонент имеет частоту 500 Гц и занимается выработкой импульсов, имеющих треугольную форму. Регулировка также осуществляется переменным резистором.
Схема
 Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке
. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение). Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы.
 ШИМ на irf4905, питание5 v
ШИМ на irf4905, питание5 v
Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.
Если нужно управлять, к примеру,12 -ти вольтовым устройством, то схема немного усложнится. Добавится так называемое «плечо раскачки» или драйвер полевого транзистора. По классике он собирается на двух, а иногда и на трёх транзисторах, но мы есть вариант немного проще, который работает при невысоких частотах:
 Ардуино, управление ШИМ по плюсовому проводу IRF4905
Ардуино, управление ШИМ по плюсовому проводу IRF4905