
по примеру установки первого колеса устанавливаем остальные.

шаг №3. У станавливаем блок под батареи и контроллер
1х рейка 0824-144 арт. 60032
2х рейка 0824-064 арт. 60014
4x винт m4x22 арт. 70561


устанавливаем контроллер и блок батарей
2x основание арт. 14403
1х me orion арт. 10021
1x Плата под батареи (6) АА арт. 14000
1x кронштейн 3 х 3 арт. 61500
2х латуниевая шпилька арт. 71946 (на рисунке показана нейлоновая шпилька.)
2x винт m4x22 арт. 70561
8х винт м4х8 70552








шаг №4. У станавливаем электродвигатели:
1x dc motor-25 (185rpm) арт. 80002
1х Втулка Shaft Connector 4мм арт.84740
1x кронштейн b арт. 61802
1x шестеренка 90т арт. 83016
4x винт m4x14 арт. 70555
2x винт m3x8 арт. 70522
2х винт m3x5 арт. 70512







шаг №5. Д остраиваем каркас тела.
2х рейка 0824-144
3х рейка 0824-160
5х рейка 0824-128
16x винт m4x22 арт. 70561
16x винт m4x14 арт. 70555






шаг № 6. К репим моторы и манипуляторы – и руки.
1х рейка 0824-112
1x постоянного тока мотор-25 6в/185rpm арт.80002
1x кронштейн b для dc двигателя 25 арт. 61802
1х рейка 0824-032
1 х Втулка Shaft Connector 4мм (2шт) арт. 84740
1х шестерня 62тм арт. 83008
1x кронштейн U1 арт. 61516
2x винт m4x16 арт. 70558
6х винт m4x14 арт. 70555
2x винт м4х8 арт. 70552
2x винт m3x8 арт.70522
2х винт m3x5 арт. 70512









шаг №7. С обираем и устанавливаем гусеницу.
арт. 87050 гусеницу 22 шт.





Пересаживаем крепление для мотора на внутреннюю сторону балки, чтоб колеса были на одном уровне.



шаг №8 . С обираем голову.
1х рейка 0824-112
2х шестеренка 62тм арт. 83008
2х кронштейн 3х3 арт. 61500
4х кронштейн 3х6 арт. 61508
3x пластина 3х6 арт. 61200
4x винт m4x14 арт. 70555
4x винт м4х8 арт. 70552
2x пластиковые шайбы 4x7x2мм арт. 72342
10x пластиковый заклепка r4060 арт. 71543









шаг №9. Сибаем шею.
1x 9g micro servo pack арт. 95026
1x mg995 standard servo pack арт.95029
1x рейка 0824-080
1x рейка 0808-072 60516
2x рейка (8мм) арт. 84416
1x d вал 4×56мм арт. 85001
1x кронштейн U1 арт. 61516
4x винт м4×22 арт.70561
1x винт м4×16 арт. 70555
5x винт м4×14 арт. 70555
4x винт м4х8 арт. 70552
8х фтулка 4м арт. 84750
8х винт м3×5 арт. 70512
1x пластиковая заклепка r4060 арт. 71543
1x винт м3×8 арт. 70522
















шаг №10. У станавливаем электронные модули:
5x rj25 cable-20cm арт. 14202
1x rj25 cable-35cm арт. 14204
1x me rgb led арт. 13400
1x me dual motor driver арт. 12015
1x me usb host арт. 13010
1x me touch sensor арт. 11020
1x me rj25 adapter арт. 13801
10x винт м4×14 арт. 70555
4x пластиковые шайбы 4x7x2мм арт. 72342
4x ph2.0-2p to stripped-end cable — 35cm арт. 14235
2.4g wireless joystick — джойстик управления.







Подключение:
Orange ports on Orion board: DC Motors of wheels
Me Dual Motor Driver: DC Motors of arms
Me RJ25 Adapter Slot1: Standard Servo
Me RJ25 Adapter Slot2: 9g Micro Servo
Port 1: Me Dual Motor Driver
Port 2: Me Dual Motor Driver
Port 4: Me RJ25 Adapter
Port 5: Me USB Host
Port 6: Me Touch Sensor
Port 7: Me RGB LED
Подключаем беспроводной модуль от джойстика в me usb host 13010.


шаг 11. П рограммируем:
Для программирования в левом нижнем углу необходимо выставить Makeblock>Orion и нажать Run on Arduino.
Делаем робота ВаллИ

Я начал с игрушки «Интерактивный ВаллИ». Текущая цена на toys’r’us составляет $34.99.
Я увлекаюсь роботами и у меня есть большой опыт в программировании и дизайне, чтобы дать роботам эмоции и жизнь. Первый совет, который я могу дать вам, — вы должны быть уверены. Второй совет — будьте креативным. Используйте их вместе, а всё остальное ваш ум сделает за вас 🙂
В магазинах есть много доступных запчастей. Моя мастерская не представляет из себя ничего особенного. Я стараюсь закупать те детали, которые подешевле. Иногда я разбираю другие игрушки, потому что сервоприводы, к сожалению, самые дорогие из всех запчастей 🙂
Для крепежа я использую кабельные стяжки, а также маленькие винтики, болтики и гаечки. Все они доступны в дешёвых наборах для сборки в местном магазине.
Чтобы изменять корпуса, я использую инструменты Dremel, а иногда и свой паяльник, чтобы расплавить пластмассу. При шлифовке, пожалуйста, имейте пылесос поблизости. Внимание: При плавке, держите открытым окно с вентилятором!
Кроме того, если вы решаете расплавить пластик, пожалуйста, используйте отдельную насадку на паяльник.
Теперь о программной части… На самом деле это очень просто. Я программирую своих роботов с использованием EZ-Robot Project и EZ-B EZ-B Robot Controller. Они почти не требуют никакого программирования. Вы можете просто подключить серводвигатели и управлять роботом с вашего ПК. Они также содержит распознавание голоса и кучу других полезных вещей. Вы можете получить их здесь: http://www.ez-robot.com.
Вот видео сВаллИ в действии…
А вот милое видео, где ВаллИ упал, преследуя свой мяч 🙂
Вот ещё старое видео моей первой версии
Шаг 1. Материалы

Хорошо, я надеюсь, что вы нашли хорошее место, чтобы начать работу. Стол должен быть таким, чтобы его не жалко было прожечь/поцарапать/испачкать (Проще говоря, не используйте свой обеденный стол!)
- 1 EZ-B с SDK или EZ-Builder software
www.ez-robot.com - 2 сервопривода для трансмиссии
www.hvwtech.com/products_view.asp?ProductID=114 - 1 стандартный сервопривод для головы (движения вправо и влево)
www.hvwtech.com/products_view.asp?ProductID=878 - 2 сервопривода для рук (движения вверх и вниз)
www.hvwtech.com/products_view.asp?ProductID=863 - 1 сервопривод на наклон головы
www.hvwtech.com/products_view.asp?ProductID=862 - 2 аналоговых датчика расстояния
www.hvwtech.com/products_view.asp?ProductID=88 - Несколько 3-проводных кабелей
www.hvwtech.com/products_view.asp?ProductID=690 - 1 ящик винтов/болтов/гаек
Доступно в местном хозяйственном магазине - Клеевой термопистолет
Доступно в магазинах для хобби - 1 бутылка супер-клея (наверное, у нас это будет клей «Момент» — прим. перев.)
Или любой другой хороший клей для пластика - 1 паяльник
Я использую паяльники с регулируемой температурой, которые стоят дорого, но в данном случае рекомендуются. Иногда можно встретить их в интернет-магазинах. - 1 набор часовых отвёрток
Обычно продаются они в пластиковых коробочках с прозрачным верхом
Шаг 2. Разберите игрушку

Используя отвёртку, разберите игрушку. Запоминайте что где было, потому что нам нужно будет её собрать обратно.
Примечание: Не стоит разбирать глаза.
Шаг 3. Руки

Вам нужно смонтировать сервоприводы на верхней части корпуса игрушки. Это будет вашей первой модификацией тела.
Фото показывает, как установлен серворуль и оригинальный механизм.
Используйте Dremel, чтобы срезать пластик на концах. Убедитесь, что вы используете низкую скорость.
— Я использовал клей-пистолет, чтобы создать красивую плотную посадку для сервоприводов.
— Я сделал два крошечных отверстия в пластике, чтобы вкрутить винты для надёжности.
Монтаж рук на сервоприводы немного сложнее. У меня нет чёткой фотографии того, как я это сделал.
Кроме того, когда вы поняли, как монтировать руку, убедитесь, что серво и руки находятся в центральном положении. Потому что серво не вращается на 360 градусов.
Шаг 4. Установка головы и шеи

Шея будет монтировать на серво GWS стандарта. Это позволит ей двигаться влево и вправо.
Примечание: Как и руки, серво должна быть по центру 😉
Я использовал сочетание Dremel с паяльником, чтобы сгладить адаптер шеи. Я проплавил 3 небольших отверстия для установки винтов на сервопривод.
Для установки серво и кронштейна на голову, вы должны будете сделать отверстие побольше.
Вначале я закрепил шею кабельными стяжками, но потом поставил болт и гайку.
Шаг 5. Привод. Часть 1

Теперь давайте дадим ВаллИ колеса!
Игрушка не имеет никакого двигатели или трансмиссии. Таким образом, вам придётся сделать его самим.
Изгиб и поворот колёс до металлической оси отрываются. Я закончил с использованием Dremel и резки большинства пластиковых деталей. В любом случае вы захотите, чтобы колёса внутри были плоскими, так что не волнуйтесь 🙂
Теперь мы собираемся просто вырвать из центра колпачок на колесах. Это позволит вытащить винт. После этого колеса распадутся на части.
Если какая-то часть сервопривода торчит наружу, то отрежьте его с использованием инструмента Dremel.
На обеих сторонах одно и то же… Посмотрите на фото 🙂
Шаг 6. Привод. Часть 2

Хорошо, теперь мы будем монтировать трансмиссию к телу.
Внимательно посмотрите на картинку, чтобы увидеть, сколько отрезать.
Лучше всего на этом шаге не торопиться. Я использую маркер, чтобы наметить, где резать.
После прикрепите сервоприводы монтажным кронштейном. После приклейте их горячим клеем.
Чтобы надежно крепление сервомашинки, я использовал кабельные стяжки.
Шаг 7. Датчик расстояния

Я полагаю, что вы хотите, чтобы ваш ВаллИ мог видеть.
Я установил с помощью Dremel датчик расстояния на его шею.
Провода, которые идут вместе в датчиком, очень малы и легко ломаются. Я заменил их 3-кабельные провода, о которых шла речь на первом шаге.
Шаг 8. Наклон головы

Ничто не делает ВаллИ более живым, чем поворот головы. Это добавляет определённые черты в его личность.
Я соединил обе части глаз, чтобы они вращались вместе. Но вы можете так не делать, чтобы ВаллИ выглядел немного смешнее (и страшнее — прим. перев.)
ПРИМЕЧАНИЕ: Не пытайтесь двигать эту крошечную серво вручную! Вы сломаете пластиковые шестерёнки внутри. Поверьте мне, я уже сломал их один раз, пытаясь сделать это.
Шаг 9. Программирование

Эта часть не самая сложная, поскольку я использую EZ-Robot Project. Это плата контроллера робота, которая подключается к компьютеру через Bluetooth. Плата поставляется с программным обеспечением, которое называется EZ-Builder. Программное обеспечение позволяет управлять роботом без необходимости программировать. Вы также можете добавить множество других функций, включая распознавание голоса.
Вот несколько ссылок для начала…
Шаг 10. Робот ваш!
Мой ВаллИ создает двух-мерные карты объектов вокруг него. Это мешает ему застрять или врезаться во что-нибудь. Это реализуется очень сложно.
Кроме того его движения не являются случайными, а зависят от происходящего. Всё это я сделал на основе многих лет наблюдения и программирования.
Шаг 11. Батарейка

Мой ВаллИ потребляет очень мнго энергии, потому что он имеет 6 сервоприводов и микроконтроллеров.
Из-за ограничений по размеру, я был ограничен небольшим аккумулятором.
Мой выбор пал на LION аккумулятор на 2000mha 7,4 вольта. Эта батарея дает моему ВаллИ около 60 минут жизни без подзарядки.
Как сделать робота на радиоуправлении вали
Управляемый робот Wall-E: конструктор из 408 деталей, совместимых с Lego
Во время летних каникул — нужно занимать детей какими-то интересными и желательно развивающими делами. Тем более, что в 2020 году много поездок к морю отменилось из-за карантина. Lego и подобные ему конструкторы — отличный выбор. Несколько смущает только стоимость оригинальных наборов — но на помощь приходит Aliexpress. В этом небольшом обзорео я расскажу про неплохой вариант набора для строительства робота WALL-E из более чем 400 деталей, который умеет ездить и управляется радиопультом.
Содержание
Купил на Aliexpress — цена на момент публикации $28.87
Поставка
Ехала посылка весьма долго, правда это было в самый разгар весеннего карантина. В конце концов я получил на почте довольно объемный сверток. Коробки для конструктора не было — все было упаковано в пузырьковую пленку. Если для себя — то без разницы, но для подарка — надо иметь в виду.
Под пленкой обнаружился простой пакет, в котором и был сложен конструктор. Детали разложены и запаяны в кульки поменьше, хоть не все вперемешку, это облегчает поиск нужной детали
Отдельно упакованы пульт управления и основной блок, в который нужно устанавливать элементы питания. Их кстати в комплекте нет. Перед сборкой робота — рекомендую найти какую-то коробку, желательно с перегородками, и разложить в нее детали из пакетиков.
Инструкция — мультиязычная, присутствует даже русский, но по факту — для самой сборки это не имеет значения. Каждый шаг подробнейшим образом проиллюстрирован — сколько и каких деталей нужно, в какой последовательности и в каком направлении их соединять.
В описании не забыли указать и как будут двигаться части робота после сборки, нагляднее посмотрим в конце — видеоверсию обзора. Имеется в инструкции и перечень всех комплектных деталей, забегая вперед — скажу, что их хватило, одна даже оказалась лишней, хотя все делалось строго по инструкции.
Сборка
Сборка начинается с рамы на которую устанавливаются двигатели. Их два — по одному на каждую гусеницу робота. Продолжаем строить каркас будущего робота, вверх от двигателей идут зубчатые передачи для управления руками и глазами
Кабели от двигателей, заканчивающиеся контактными площадками, закрепляются на задней части робота. Процесс сборки полностью забирает внимание ребенка — тут главное не торопится и делать все внимательно, все тщательно проверять.
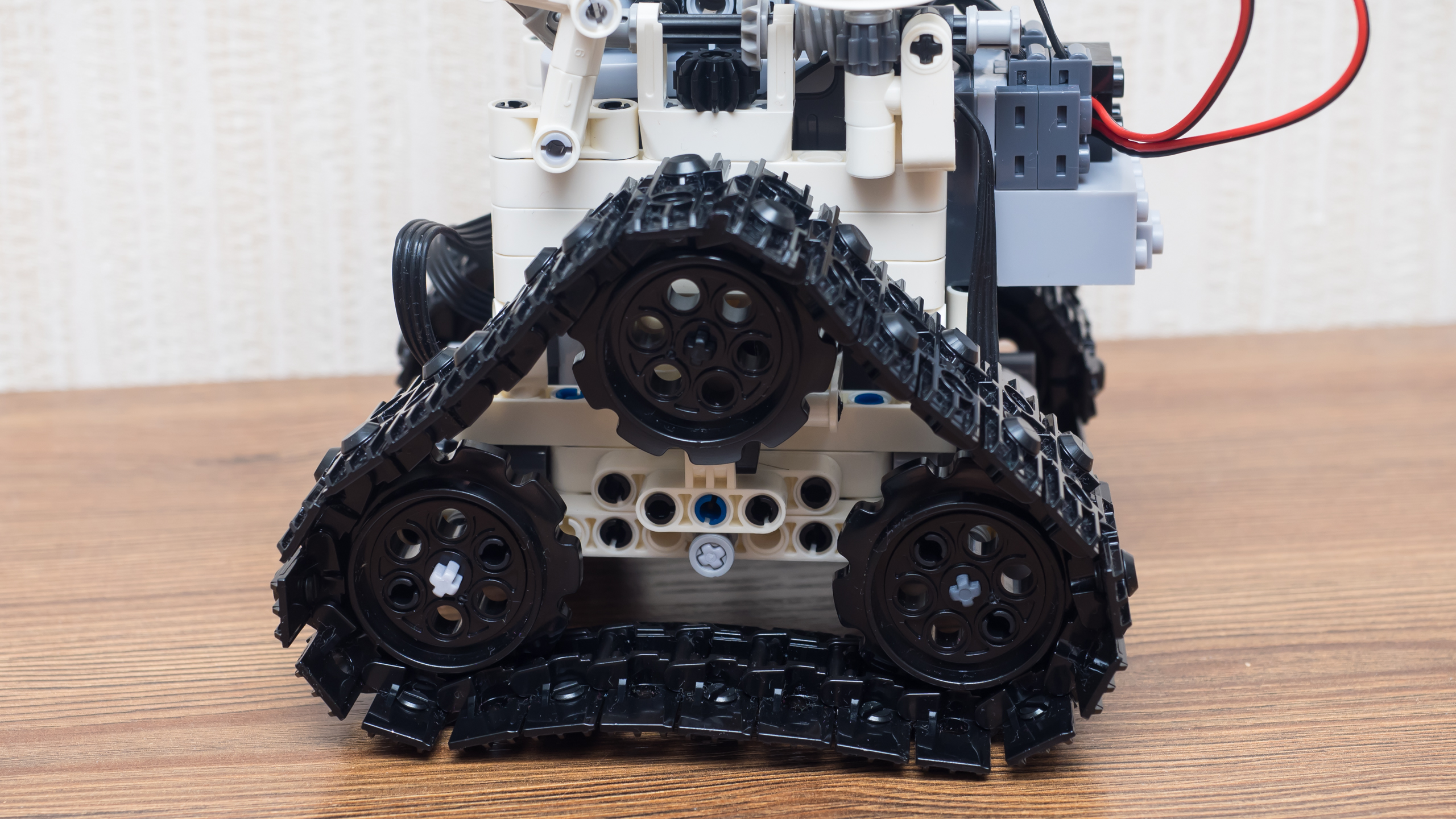
Наконец появляются руки робота, они будут вращаться когда робот будет ездить. Колеса на которые будут устанавливаться гусеницы. Двигатели крутят по одному колесу на каждую сторону
Сборка гусениц, каждый элемент — отдельно, всего их 52, по 26 на каждую гусеницу. Защелки довольно тугие, мне пришлось почти полностью делать их самому. Перед тем как соединить гусеницу в кольцо, ее нужно установить на колеса и защелкнуть уже на весу.
Ее удерживают три колеса, зубцы которых попадают в пазы проходящие в внутренней части гусеницы. Держится все надежно, не спадает.
Переходим к центральному модулю. В него устанавливается 6 батареек типоразмера АА, по три в каждую из сторон. А вот для пульта дистанционного управления — понадобятся батарейки поменьше — ААА. В комплекте они не идут, нужно приобрести отдельно.
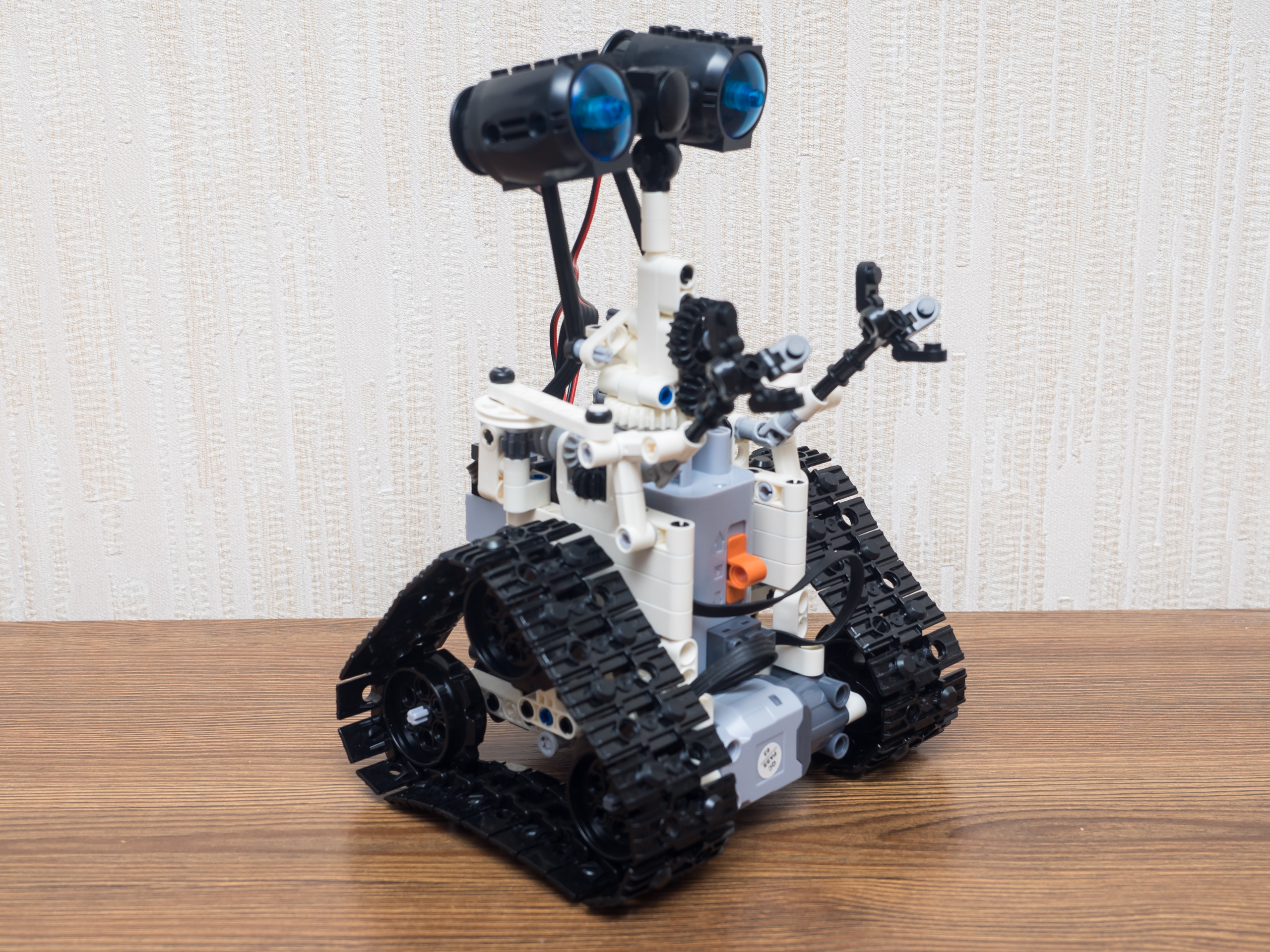
Результат
Последними устанавливаем — глаза робота. В каждом глазе находится светодиод. Выключатель питания находится на «груди» робота.

Глаза будут светится и двигаться когда робот ездит. Также при езде вращаются его «руки». Все это ложится на плечи двух ходовых двигателей робота — через систему передач.
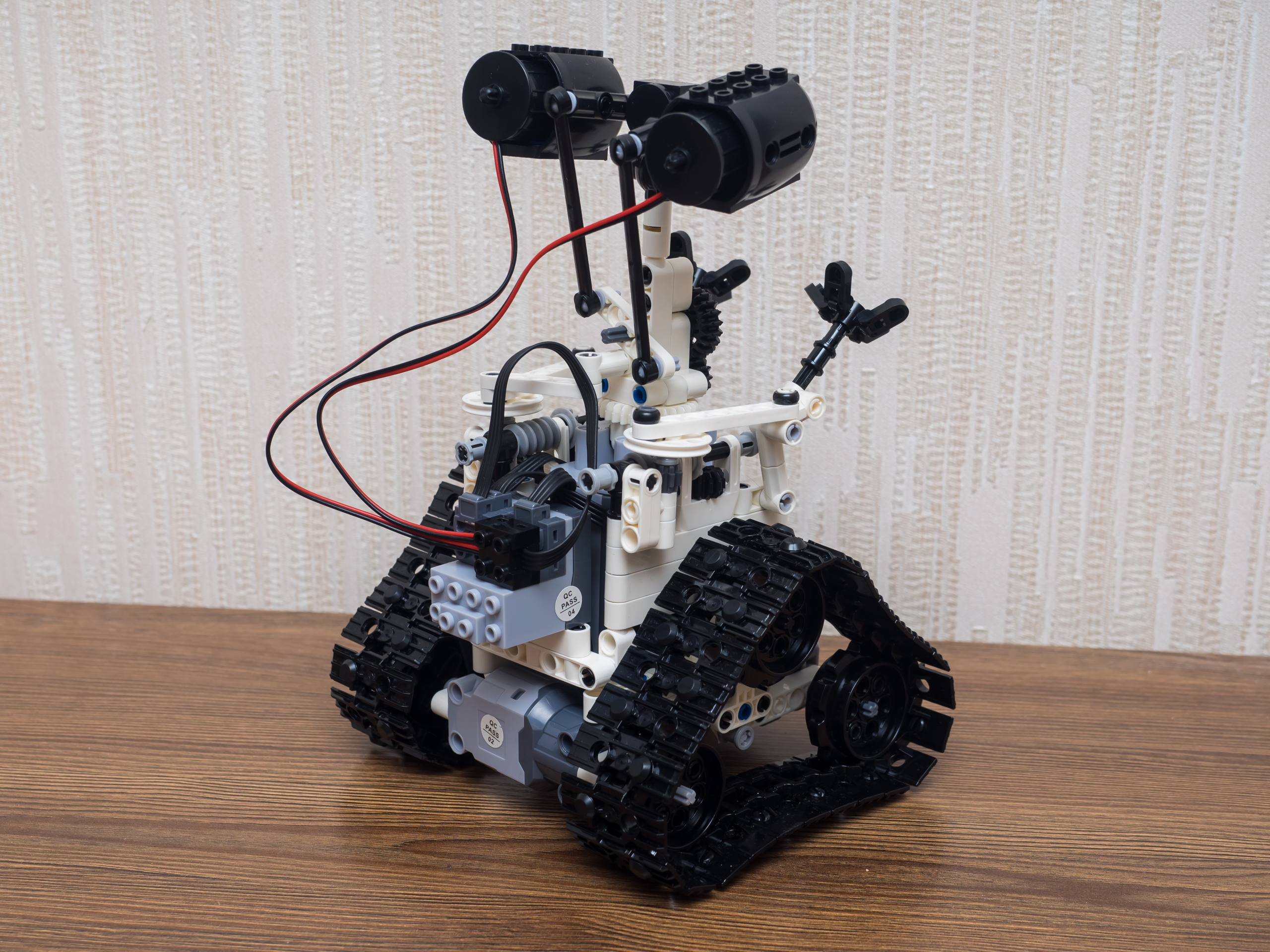
Вид сзади — многовато проводов конечно, но при желании их можно попробовать закрепить аккуратнее.
Высота собранного робота — чуть более 22 см. Достаточно крупный, отлично выполняет роль игрушки на радиоуправлении.

После машинок на радиоуправлении — к особенностям робота нужно привыкать, так как каждая гусеница управляется отдельным джойстиком на пульте. Принцип как у трактора. Джойстики можно реверсировать — как кому удобнее. Ездит робот довольно шустро, лучше по гладким поверхностям — плитке или ламинату, по коврам — тяжелее.

Видео версия
В целом за свою стоимость — отличный развивающий конструктор, и интересная игрушка, покупкой я доволен. В этом магазине есть и другие подобные наборы, не исключаю покупку еще какого нибудь.
Как сделать робота на радиоуправлении вали
Я начал с игрушки «Интерактивный ВаллИ». Текущая цена на toys’r’us составляет $34.99.
Я увлекаюсь роботами и у меня есть большой опыт в программировании и дизайне, чтобы дать роботам эмоции и жизнь. Первый совет, который я могу дать вам, — вы должны быть уверены. Второй совет — будьте креативным. Используйте их вместе, а всё остальное ваш ум сделает за вас ��
В магазинах есть много доступных запчастей. Моя мастерская не представляет из себя ничего особенного. Я стараюсь закупать те детали, которые подешевле. Иногда я разбираю другие игрушки, потому что сервоприводы, к сожалению, самые дорогие из всех запчастей ��
Для крепежа я использую кабельные стяжки, а также маленькие винтики, болтики и гаечки. Все они доступны в дешёвых наборах для сборки в местном магазине.
Чтобы изменять корпуса, я использую инструменты Dremel, а иногда и свой паяльник, чтобы расплавить пластмассу. При шлифовке, пожалуйста, имейте пылесос поблизости. Внимание: При плавке, держите открытым окно с вентилятором!
Кроме того, если вы решаете расплавить пластик, пожалуйста, используйте отдельную насадку на паяльник.
Теперь о программной части… На самом деле это очень просто. Я программирую своих роботов с использованием EZ-Robot Project и EZ-B EZ-B Robot Controller. Они почти не требуют никакого программирования. Вы можете просто подключить серводвигатели и управлять роботом с вашего ПК. Они также содержит распознавание голоса и кучу других полезных вещей. Вы можете получить их здесь: http://www.ez-robot.com.
Вот видео сВаллИ в действии…
А вот милое видео, где ВаллИ упал, преследуя свой мяч ��
Вот ещё старое видео моей первой версии
Шаг 1. Материалы
Хорошо, я надеюсь, что вы нашли хорошее место, чтобы начать работу. Стол должен быть таким, чтобы его не жалко было прожечь/поцарапать/испачкать (Проще говоря, не используйте свой обеденный стол!)
- 1 EZ-B с SDK или EZ-Builder software
www.ez-robot.com - 2 сервопривода для трансмиссии
www.hvwtech.com/products_view.asp?ProductID=114 - 1 стандартный сервопривод для головы (движения вправо и влево)
www.hvwtech.com/products_view.asp?ProductID=878 - 2 сервопривода для рук (движения вверх и вниз)
www.hvwtech.com/products_view.asp?ProductID=863 - 1 сервопривод на наклон головы
www.hvwtech.com/products_view.asp?ProductID=862 - 2 аналоговых датчика расстояния
www.hvwtech.com/products_view.asp?ProductID=88 - Несколько 3-проводных кабелей
www.hvwtech.com/products_view.asp?ProductID=690 - 1 ящик винтов/болтов/гаек
Доступно в местном хозяйственном магазине - Клеевой термопистолет
Доступно в магазинах для хобби - 1 бутылка супер-клея (наверное, у нас это будет клей «Момент» — прим. перев.)
Или любой другой хороший клей для пластика - 1 паяльник
Я использую паяльники с регулируемой температурой, которые стоят дорого, но в данном случае рекомендуются. Иногда можно встретить их в интернет-магазинах. - 1 набор часовых отвёрток
Обычно продаются они в пластиковых коробочках с прозрачным верхом
Шаг 2. Разберите игрушку
Используя отвёртку, разберите игрушку. Запоминайте что где было, потому что нам нужно будет её собрать обратно.
Примечание: Не стоит разбирать глаза.
Шаг 3. Руки
Вам нужно смонтировать сервоприводы на верхней части корпуса игрушки. Это будет вашей первой модификацией тела.
Фото показывает, как установлен серворуль и оригинальный механизм.
Используйте Dremel, чтобы срезать пластик на концах. Убедитесь, что вы используете низкую скорость.
— Я использовал клей-пистолет, чтобы создать красивую плотную посадку для сервоприводов.
— Я сделал два крошечных отверстия в пластике, чтобы вкрутить винты для надёжности.
Монтаж рук на сервоприводы немного сложнее. У меня нет чёткой фотографии того, как я это сделал.
Кроме того, когда вы поняли, как монтировать руку, убедитесь, что серво и руки находятся в центральном положении. Потому что серво не вращается на 360 градусов.
Шаг 4. Установка головы и шеи
Шея будет монтировать на серво GWS стандарта. Это позволит ей двигаться влево и вправо.
Примечание: Как и руки, серво должна быть по центру ��
Я использовал сочетание Dremel с паяльником, чтобы сгладить адаптер шеи. Я проплавил 3 небольших отверстия для установки винтов на сервопривод.
Для установки серво и кронштейна на голову, вы должны будете сделать отверстие побольше.
Вначале я закрепил шею кабельными стяжками, но потом поставил болт и гайку.
Шаг 5. Привод. Часть 1
Теперь давайте дадим ВаллИ колеса!
Игрушка не имеет никакого двигатели или трансмиссии. Таким образом, вам придётся сделать его самим.
Изгиб и поворот колёс до металлической оси отрываются. Я закончил с использованием Dremel и резки большинства пластиковых деталей. В любом случае вы захотите, чтобы колёса внутри были плоскими, так что не волнуйтесь ��
Теперь мы собираемся просто вырвать из центра колпачок на колесах. Это позволит вытащить винт. После этого колеса распадутся на части.
Если какая-то часть сервопривода торчит наружу, то отрежьте его с использованием инструмента Dremel.
На обеих сторонах одно и то же… Посмотрите на фото ��
Шаг 6. Привод. Часть 2
Хорошо, теперь мы будем монтировать трансмиссию к телу.
Внимательно посмотрите на картинку, чтобы увидеть, сколько отрезать.
Лучше всего на этом шаге не торопиться. Я использую маркер, чтобы наметить, где резать.
После прикрепите сервоприводы монтажным кронштейном. После приклейте их горячим клеем.
Чтобы надежно крепление сервомашинки, я использовал кабельные стяжки.
Шаг 7. Датчик расстояния
Я полагаю, что вы хотите, чтобы ваш ВаллИ мог видеть.
Я установил с помощью Dremel датчик расстояния на его шею.
Провода, которые идут вместе в датчиком, очень малы и легко ломаются. Я заменил их 3-кабельные провода, о которых шла речь на первом шаге.
Шаг 8. Наклон головы
Ничто не делает ВаллИ более живым, чем поворот головы. Это добавляет определённые черты в его личность.
Я соединил обе части глаз, чтобы они вращались вместе. Но вы можете так не делать, чтобы ВаллИ выглядел немного смешнее (и страшнее — прим. перев.)
ПРИМЕЧАНИЕ: Не пытайтесь двигать эту крошечную серво вручную! Вы сломаете пластиковые шестерёнки внутри. Поверьте мне, я уже сломал их один раз, пытаясь сделать это.
Шаг 9. Программирование
Эта часть не самая сложная, поскольку я использую EZ-Robot Project. Это плата контроллера робота, которая подключается к компьютеру через Bluetooth. Плата поставляется с программным обеспечением, которое называется EZ-Builder. Программное обеспечение позволяет управлять роботом без необходимости программировать. Вы также можете добавить множество других функций, включая распознавание голоса.
Вот несколько ссылок для начала…
Шаг 10. Робот ваш!
Мой ВаллИ создает двух-мерные карты объектов вокруг него. Это мешает ему застрять или врезаться во что-нибудь. Это реализуется очень сложно.
Кроме того его движения не являются случайными, а зависят от происходящего. Всё это я сделал на основе многих лет наблюдения и программирования.
Шаг 11. Батарейка
Мой ВаллИ потребляет очень мнго энергии, потому что он имеет 6 сервоприводов и микроконтроллеров.
Из-за ограничений по размеру, я был ограничен небольшим аккумулятором.
Мой выбор пал на LION аккумулятор на 2000mha 7,4 вольта. Эта батарея дает моему ВаллИ около 60 минут жизни без подзарядки.
Робот WALL-E на Arduino
Первая версия робота Валл-и. Пока он может только крутить головой. Управляется с компьютера по Serial-соединению при помощи программы на Processing.
- вращение рук,
- голосовое управление,
- езду.
Инструкция на сайте проекта.
Использованные компоненты: Игрушечный Wall-e, Arduino (или любой другой микроконтроллер), серво-привод
 ,
, 
Управляемый робот Wall-E: конструктор из 408 деталей, совместимых с Lego
Во время летних каникул — нужно занимать детей какими-то интересными и желательно развивающими делами. Тем более, что в 2020 году много поездок к морю отменилось из-за карантина. Lego и подобные ему конструкторы — отличный выбор. Несколько смущает только стоимость оригинальных наборов — но на помощь приходит Aliexpress. В этом небольшом обзорео я расскажу про неплохой вариант набора для строительства робота WALL-E из более чем 400 деталей, который умеет ездить и управляется радиопультом.
Содержание
Купил на Aliexpress — цена на момент публикации $28.87
Поставка
Ехала посылка весьма долго, правда это было в самый разгар весеннего карантина. В конце концов я получил на почте довольно объемный сверток. Коробки для конструктора не было — все было упаковано в пузырьковую пленку. Если для себя — то без разницы, но для подарка — надо иметь в виду.
Под пленкой обнаружился простой пакет, в котором и был сложен конструктор. Детали разложены и запаяны в кульки поменьше, хоть не все вперемешку, это облегчает поиск нужной детали
Отдельно упакованы пульт управления и основной блок, в который нужно устанавливать элементы питания. Их кстати в комплекте нет. Перед сборкой робота — рекомендую найти какую-то коробку, желательно с перегородками, и разложить в нее детали из пакетиков.
Инструкция — мультиязычная, присутствует даже русский, но по факту — для самой сборки это не имеет значения. Каждый шаг подробнейшим образом проиллюстрирован — сколько и каких деталей нужно, в какой последовательности и в каком направлении их соединять.
В описании не забыли указать и как будут двигаться части робота после сборки, нагляднее посмотрим в конце — видеоверсию обзора. Имеется в инструкции и перечень всех комплектных деталей, забегая вперед — скажу, что их хватило, одна даже оказалась лишней, хотя все делалось строго по инструкции.
Сборка
Сборка начинается с рамы на которую устанавливаются двигатели. Их два — по одному на каждую гусеницу робота. Продолжаем строить каркас будущего робота, вверх от двигателей идут зубчатые передачи для управления руками и глазами
Кабели от двигателей, заканчивающиеся контактными площадками, закрепляются на задней части робота. Процесс сборки полностью забирает внимание ребенка — тут главное не торопится и делать все внимательно, все тщательно проверять.
Наконец появляются руки робота, они будут вращаться когда робот будет ездить. Колеса на которые будут устанавливаться гусеницы. Двигатели крутят по одному колесу на каждую сторону
Сборка гусениц, каждый элемент — отдельно, всего их 52, по 26 на каждую гусеницу. Защелки довольно тугие, мне пришлось почти полностью делать их самому. Перед тем как соединить гусеницу в кольцо, ее нужно установить на колеса и защелкнуть уже на весу.
Ее удерживают три колеса, зубцы которых попадают в пазы проходящие в внутренней части гусеницы. Держится все надежно, не спадает.
Переходим к центральному модулю. В него устанавливается 6 батареек типоразмера АА, по три в каждую из сторон. А вот для пульта дистанционного управления — понадобятся батарейки поменьше — ААА. В комплекте они не идут, нужно приобрести отдельно.
Результат
Последними устанавливаем — глаза робота. В каждом глазе находится светодиод. Выключатель питания находится на «груди» робота.
Глаза будут светится и двигаться когда робот ездит. Также при езде вращаются его «руки». Все это ложится на плечи двух ходовых двигателей робота — через систему передач.
Вид сзади — многовато проводов конечно, но при желании их можно попробовать закрепить аккуратнее.
Высота собранного робота — чуть более 22 см. Достаточно крупный, отлично выполняет роль игрушки на радиоуправлении.
После машинок на радиоуправлении — к особенностям робота нужно привыкать, так как каждая гусеница управляется отдельным джойстиком на пульте. Принцип как у трактора. Джойстики можно реверсировать — как кому удобнее. Ездит робот довольно шустро, лучше по гладким поверхностям — плитке или ламинату, по коврам — тяжелее.
Видео версия
В целом за свою стоимость — отличный развивающий конструктор, и интересная игрушка, покупкой я доволен. В этом магазине есть и другие подобные наборы, не исключаю покупку еще какого нибудь.