Синхронный двигатель с постоянными магнитами
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
-
По конструкции ротора синхронные двигатели делятся на: ; .
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

-
Также по конструкции ротора СДПМ делятся на: ; .


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
-
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


-
Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.

Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
-
Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
-
Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
-
В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
-
Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом; – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Пришло смс с кодом подтверждения . отправитель PMSM? что это такое? Что за сайт или что за компания ?
ООО «Филип Моррис Сэйлз энд Маркетинг» или PMSM – одна из аффилированных компаний «Филип Моррис Интернэшнл» в России.
Компания осуществляет деятельность в сфере поддержки сбыта в России торговых марок сигарет «Филип Моррис Интернэшнл», среди которых Parliament, Marlboro, Chesterfield, L&M, Eve, Bond Street, Next, «Оптима», Muratti, «Союз Apollo».
Если Вы не имеете отношение ни к какой программе от компании, то не обращайте внимания! просто игнорьте )
Типы двигателей, используемых в электромобилях
Электромобили не являются чем-то новым для этого мира, но с развитием технологий и повышенным вниманием к борьбе с загрязнением, он стал залогом мобильности будущего. Основным элементом электромобиля, помимо аккумуляторов электромобиля, который заменяет двигатели внутреннего сгорания, является электродвигатель. Быстрое развитие в области силовой электроники и методов управления создало пространство для различных типов электродвигателей, которые будут использоваться в электромобилях. Электродвигатели, используемые в автомобилях, должны обладать такими характеристиками, как высокий пусковой момент, высокая удельная мощность, хороший КПД и т. Д.
Различные типы электродвигателей, используемых в электромобилях
- Двигатель серии постоянного тока
- Бесщеточный двигатель постоянного тока
- Синхронный двигатель с постоянным магнитом (PMSM)
- Трехфазные асинхронные двигатели переменного тока
- Электродвигатели с регулируемым сопротивлением (SRM)
1. Двигатель серии постоянного тока
Высокий пусковой момент двигателя серии DC делает его подходящим вариантом для тягового применения. Это был наиболее широко используемый двигатель для тяги в начале 1900-х годов. Преимущества этого двигателя — легкое регулирование скорости, а также способность выдерживать резкое увеличение нагрузки. Все эти характеристики делают его идеальным тяговым двигателем. Основным недостатком двигателей постоянного тока является необходимость в обслуживании за счет щеток и коммутаторов. Эти двигатели используются на индийских железных дорогах. Этот двигатель относится к категории щеточных двигателей постоянного тока.
2. Бесщеточные двигатели постоянного тока
Это похоже на двигатели постоянного тока с постоянными магнитами. Он называется бесщеточным, потому что в нем нет коммутатора и щеточного устройства. Коммутация в этом двигателе осуществляется электронным способом, поскольку двигатели BLDC не требуют обслуживания. Двигатели BLDC обладают такими характеристиками тяги, как высокий пусковой момент, высокий КПД около 95-98% и т. Д. Двигатели BLDC подходят для проектирования с высокой удельной мощностью. Двигатели BLDC являются наиболее предпочтительными двигателями для электромобилей из-за их тяговых характеристик. Вы можете узнать больше о двигателях BLDC, сравнив их с обычным щеточным двигателем.
Двигатели BLDC также бывают двух типов:
я. Двигатель BLDC типа Out-runner:
В этом типе ротор двигателя находится снаружи, а статор находится внутри. Его также называют ступичными двигателями, потому что колесо напрямую связано с внешним ротором. Для этого типа двигателей не требуется внешний редуктор. В некоторых случаях сам двигатель имеет встроенные планетарные передачи. Этот двигатель делает автомобиль менее громоздким, поскольку не требует какой-либо системы передач. Это также устраняет необходимость в пространстве для установки двигателя. Существует ограничение на размеры двигателя, которое ограничивает выходную мощность во встроенной конфигурации. Этот двигатель широко используется производителями электрических велосипедов, такими как Hullikal, Tronx, Spero, велосипеды с малой скоростью и т. Д. Он также используется производителями двухколесных транспортных средств, такими как 22 Motors, NDS Eco Motors и т. Д.


II. Внутренний двигатель BLDC:
В этом типе ротор двигателя находится внутри, а статор снаружи, как у обычных двигателей. Этим моторам требуется внешняя система трансмиссии для передачи мощности на колеса, из-за этого конфигурация внешнего колеса немного громоздка по сравнению с конфигурацией внутреннего колеса. Многие производители трехколесных транспортных средств, такие как Goenka Electric Motors, Speego Vehicles, Kinetic Green, Volta Automotive, используют двигатели BLDC. Производители скутеров с низкими и средними характеристиками также используют двигатели BLDC для приведения в движение.


Именно по этим причинам этот двигатель широко используется в электромобилях. Главный недостаток — высокая стоимость за счет постоянных магнитов. Перегрузка двигателя сверх определенного предела сокращает срок службы постоянных магнитов из-за тепловых условий.
3. Синхронный двигатель с постоянными магнитами (PMSM)
Этот двигатель также похож на двигатель BLDC, который имеет постоянные магниты на роторе. Подобно двигателям BLDC, эти двигатели также обладают такими тяговыми характеристиками, как высокая удельная мощность и высокий КПД. Разница в том, что PMSM имеет синусоидальную обратную ЭДС, тогда как BLDC имеет трапециевидную обратную ЭДС. Синхронные двигатели с постоянным магнитом доступны для более высоких мощностей. PMSM — лучший выбор для высокопроизводительных приложений, таких как автомобили, автобусы. Несмотря на высокую стоимость, PMSM составляет жесткую конкуренцию асинхронным двигателям из-за большей эффективности, чем у последних. PMSM также дороже, чем двигатели BLDC. Большинство производителей автомобилей используют двигатели PMSM для своих гибридных и электромобилей.. Например, Toyota Prius, Chevrolet Bolt EV, Ford Focus Electric, нулевые мотоциклы S / SR, Nissan Leaf, Hinda Accord, BMW i3 и т. Д. Используют двигатель PMSM для приведения в движение.

4. Трехфазные асинхронные двигатели переменного тока.
В индукционных двигателях не имеют высокий начальный колпак, как двигатели серии DC при фиксированном напряжении и фиксированной работе частоты. Но эту характеристику можно изменить, используя различные методы управления, такие как методы FOC или v / f. При использовании этих методов управления максимальный крутящий момент достигается при запуске двигателя, что подходит для тягового применения. Асинхронные двигатели с короткозамкнутым ротором имеют долгий срок службы из-за меньшего количества обслуживания. Асинхронные двигатели могут иметь КПД 92-95%. Недостаток асинхронного двигателя является то, что он требует сложной схемы инвертора и управления двигателем трудно.



В двигателях с постоянными магнитами магниты вносят вклад в плотность магнитного потока B. Следовательно, регулировать значение B в асинхронных двигателях проще по сравнению с двигателями с постоянными магнитами. Это связано с тем, что в асинхронных двигателях значение B можно регулировать путем изменения напряжения и частоты (V / f) в зависимости от требований крутящего момента. Это помогает снизить потери, что, в свою очередь, повышает эффективность.
Tesla Model S — лучший пример, подтверждающий высокую производительность асинхронных двигателей по сравнению с их аналогами. Выбирая асинхронные двигатели, Тесла, возможно, хотел избавиться от зависимости от постоянных магнитов. Даже Mahindra Reva e2o использует трехфазный асинхронный двигатель для движения.Основные производители автомобилей, такие как TATA motors, планируют использовать асинхронные двигатели в своих автомобилях и автобусах. Производитель двухколесных транспортных средств TVS motors запустит в производство электрический скутер, в котором в качестве силовой установки используется асинхронный двигатель. Асинхронные двигатели являются предпочтительным выбором для электромобилей, ориентированных на производительность, из-за их низкой стоимости. Другое преимущество заключается в том, что он может выдерживать суровые условия окружающей среды. Благодаря этим преимуществам индийские железные дороги начали заменять свои двигатели постоянного тока асинхронными двигателями переменного тока.
5. Электродвигатели с регулируемым сопротивлением (SRM)

Рекомендации по выбору правильного двигателя для вашего электромобиля
Для выбора подходящих двигателей электромобилей, необходимо сначала перечислить требования к характеристикам, которым должно соответствовать транспортное средство, условиям эксплуатации и связанным с этим расходам. Например, для картинга и двухколесных транспортных средств, требующих меньшей мощности (в основном менее 3 кВт) при невысокой стоимости, хорошо использовать моторы-концентраторы BLDC. Для трехколесных и двухколесных транспортных средств также хорошо выбрать двигатели BLDC с внешней зубчатой передачей или без нее. Для приложений с высокой мощностью, таких как высокопроизводительные двухколесные автомобили, автомобили, автобусы, грузовики, идеальным выбором двигателя были бы двигатели PMSM или индукционные. После того, как синхронный реактивный двигатель и реактивный реактивный двигатель станут экономически эффективными как PMSM или асинхронные двигатели, можно будет иметь больше вариантов типов двигателей для применения в электромобиле.
Синхронные двигатели с постоянными магнитами на роторе: управление (синус и/или трапеция)
В продолжение темы модельно ориетированного проектирования, публикую очередную статью Калачева Юрия Николаевича, автора книги Моделирование в электроприводе. Инструкция по пониманию. Данный текст еще готовится к публикации в специализированных изданиях, но читатели хабра увидят его первые.
В зарубежной литературе можно встретить два термина, связанных с этими двигателями:
PMSM (Permanent Magnet Synchronous Motor), что на языке Пушкина означает: синхронный двигатель c постоянными магнитами (СДПМ), и это понятно.
BLDC (Brush Less Direct Current), что переводится с языка Шекспира, как Бесколлекторный (бесщеточный) Двигатель Постоянного Тока (БДПТ), и это непонятно. Причем здесь постоянный ток?
С этими названиями и у нас, и за рубежом существует немалая путаница.
Например, термин PMSM (СДПМ) может применяться для обозначения двигателя с постоянными магнитами на роторе, независимо от формы его ЭДС, но так же часто его применяют, подразумевая исключительно синусоидальную форму ЭДС двигателя.
Термин BLDC (БДПТ) может применяться для обозначения двигателя с постоянными магнитами на роторе и трапецеидальной ЭДС, а может вообще обозначать не двигатель, а некий мехатронный узел, включающий в себя:
двигатель с постоянными магнитами и трапецеидальной ЭДС
датчик положения ротора
управляемый по сигналам этого датчика полупроводниковый коммутатор.
Собственно этот мехатронный узел, который может, как и двигатель постоянного тока, управляться постоянным напряжением и породил сам термин BLDC (БДПТ).
Ещё по отношению к синхронным двигателям с постоянными магнитами на роторе в отечественной литературе, можно встретить название «вентильный двигатель».
Попытки автора разобраться с этим термином быстро зашли в тупик, так как в различных источниках обнаружились явные противоречия.
Например, в книге Г.Б. Онищенко «Электрические двигатели» на стр. 47 «вентильным» называется двигатель соответствующий термину BLDC (БДПТ), что предполагает трапецеидальную ЭДС, и это понимаемо.
Но двигатели типа 5ДВМ сам производитель (ЧЭАЗ) называет «вентильными», хотя при этом утверждает, что они имеют синусоидальную ЭДС.
А вот википедия: «Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре. ».
Ну, . приехали .
Какой термин, какой форме ЭДС соответствует – непонятно.
А между тем, именно эта форма определяет выбор структуры системы управления двигателем.
Как человек занимающийся управлением этими двигателями хочу предложить:
во избежание путаницы забыть термин «вентильный двигатель»
термином БДПТ обозначать не двигатель, а исключительно описанный выше мехатронный узел (аналог двигателя постоянного тока)
делить синхронные двигатели с постоянными магнитами на роторе (СДПМ) по типу ЭДС на две группы:
1) с синусоидальной ЭДС (далее, для краткости, — СДПМс)
2) с трапецеидальной ЭДС (далее, для краткости, — СДПМт)
Управление
При управлении двигателями с синусоидальной ЭДС используется векторное регулирование (подробно описано в книжке по ссылке). С точки зрения возможностей и качества управления это наилучший вариант.
Однако и двигатели с трапецеидальной ЭДС в силу более простой конструкции статорных обмоток и возможности более простого управления применяются довольно часто.
Конструкция двигателей
Форма ЭДС определяется конструкцией двигателя.
Ротор синхронных двигателей представляет собой магнит с различным количеством пар полюсов.
На Рис 1. показаны возможные конструкции статорных обмоток. Обычно синусоидальной ЭДС соответствует «распределенная» намотка, а трапецеидальной «сосредоточенная».

Рисунок 1. Конструкции статорных обмоток
Статорная обмотка двигателя с трапецеидальной ЭДС проще и технологичнее, за счёт этого цена такого двигателя несколько ниже.
Далее остановимся более подробно на двигателе с трапецеидальной ЭДС (СДПМт)
Двигатель с одной парой полюсов будет выглядеть в разрезе так, как показано на Рис.2.
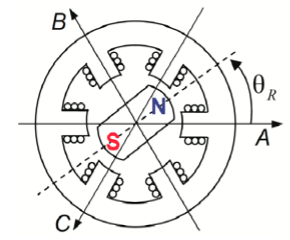
Рисунок 2. Схема двигател с одной парой полюсов я в разрезе
На статоре СДПМт намотаны три обмотки (А, В, С), сдвинутые в пространстве на 120°. Каждая обмотка состоит из двух секций, включённых встречно. Таким образом, при протекании тока в обмотке она создаёт внутри двигателя два полюса (положительный и отрицательный), к которым и притягивается магнитный ротор. Поочередное изменение токов в обмотках переключает полюса обмоток и заставляет ротор двигаться вслед за полем. На этом и основан принцип работы двигателя.
В дальнейшем будем считать нулевым то угловое положение ротора при котором вектор потока ротора совпадает по направлению с осью фазы А (осью обмотки А).
Уравнения равновесия статорных обмоток СДПМт в системе АВС
Уравнения равновесия статорных обмоток двигателя при его включении в «звезду» в неподвижных фазных координатах АВС имеют вид (1).
— потокосцепления фазных обмоток
— активное сопротивление фазной обмотки.
Поток в обмотке каждой фазы формируется из следующих составляющих:
поток, наводимый собственным током фазы
поток, наводимый магнитными полями других фазных обмоток
поток, наводимый в обмотке магнитами ротора.
Проиллюстрируем это системой (2):
— индуктивность фазных обмоток
— взаимные индуктивности обмоток
— потокосцепления, наводимые в обмотках магнитом ротора.
В общем случае все индуктивности системы (2) могут являться переменными функциями угла поворота поля .
В частном случае для неявнополюсного двигателя (при цилиндрическом роторе) индуктивности и взаимные индуктивности обмоток не зависят от угла.
Обозначив
— индуктивность фазной обмотки,
— взаимная индуктивность двух фазных обмоток,
и подставив выражения (2) в систему (1), получим выражение (3):
Заметив, что производные по времени от потокосцеплений магнитов ротора
— есть не что иное, как наводимая магнитами
ротора в этих обмотках ЭДС, систему (3) можно переписать в виде (4).
Теперь введем понятие единичной функции формы ЭДС.
Единичная функция формы ЭДС — это функция от угла поля (), имеющая единичную амплитуду и повторяющая по форме ЭДС. Для фаз А,В,С обозначим эти функции: .
Используя единичные функции формы, мгновенные ЭДС в фазах можно представить выражением (5):
— амплитуда потокосцепления ротора и фазной обмотки
— скорость вращения поля
— скорость вращения ротора
— число пар полюсов двигателя.
Зависимости единичных функций формы ЭДС обмоток СДПМт от угла поворота поля представлены На Рис.3.
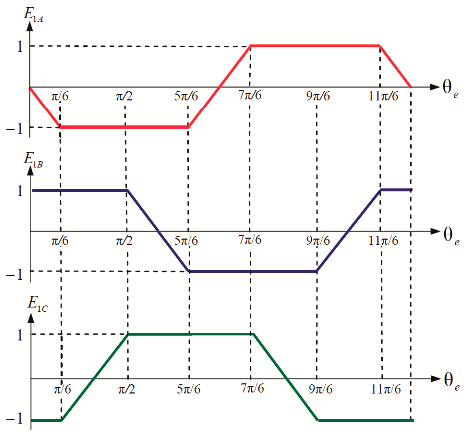
Рис. 3. Единичные функции форм ЭДС
Вывод формулы для расчета электромагнитного момента СДПМт
Момент, создаваемый двигателем, является суммой моментов, создаваемых его обмотками.
Посмотрим на уравнение равновесия обмотки А из системы (4).
Умножив обе его части на ток обмотки, получим уравнение для мгновенной электрической мощности обмотки:
Рассмотрим составляющие этой мощности:
— реактивная мощность обмотки
— активная мощность, рассеивающаясяв обмотке
— мощность, создающая электромагнитный момент.
Если пренебречь потерями при переходе электрической мощности в механическую, то можно записать:
— электромагнитный момент двигателя
— угловая скорость вращения ротора.
Подставив в формулу (6) значения ЭДС из соотношений (5), получим формулу вычисления электромагнитного момента ротора (7).
Коммутация обмоток СДПМт
В соответствии с формулой (7) момент СДПМт пропорционален сумме произведений фазных токов на функции формы соответствующих ЭДС.
Максимальное значение ЭДС обмотки соответствует плоским участкам трапеции ЭДС. Если бы нам удалось на этих участках угловой траектории сформировать в обмотках токи некоторой постоянной амплитуды, например, совпадающие по знаку со знаком ЭДС, то это позволило бы сформировать при этих токах максимальный постоянный положительный момент.
Для примера рассмотрим на Рис.3 участок угловой траектории от π/6 до π/2. На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (Udc). При этом фаза С не используется (отключена от источника Udc).
Величина тока, протекающего через обмотки, будет в свою очередь определяться прикладываемым к обмоткам напряжением, величиной ЭДС и параметрами обмоток.
Если рассуждать таким образом, то можно составить таблицу коммутаций обмоток, обеспечивающих в зависимости от положения ротора момент нужного знака (Табл. 1).
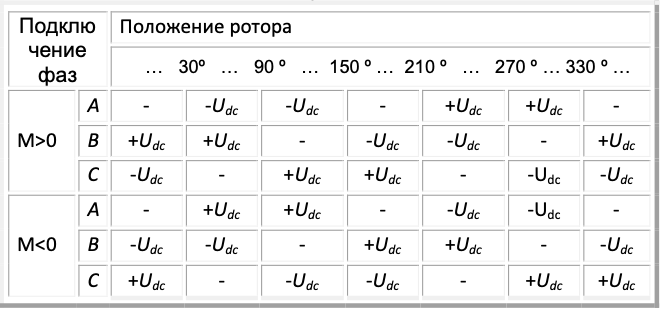
Таблица1. Закон коммутации
Обмотки трёхфазного двигателя можно коммутировать на внешний источник напряжения с помощью трехфазного мостового инвертора. Для этого состояние инвертора надо поставить в зависимость от положения ротора. Обычно это делается с помощью датчика положения ротора (ДПР). Этот датчик имеет три канала. Каждый канал выдает за один оборот двигателя импульс, соответствующий половине периода вращения, при этом импульсы в каналах сдвинуты на 120°.
Логическая обработка сигналов ДПР позволяет определить — в каком из шести секторов в данный момент находится ротор.
Работа ДПР поясняется Табл. 2.
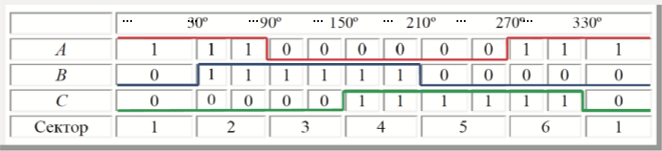
Таблица 2. Работа ДПР (определение сектора)
Возможная структура системы управления моментом СДПМт
Алгоритм, описанный в Табл.1, предполагает протекание одного и того же тока в двух фазах двигателя при единичном значении функции формы ЭДС в обмотках фаз. Поэтому выражение (7) можно переписать в виде (8).
Где: — значение тока в фазах.
То есть значение момента пропорционально величине тока в обмотках двигателя.
Вытекающая из формулы (8) структура системы управления моментом в приводе с СДПМт изображена на Рис.4.
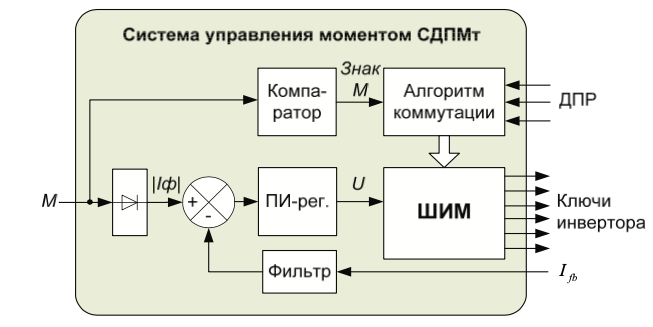
Рисунок 4. Система управления моментом БДПТ
Данная структура позволяет получить нужный момент, формируя в обмотках двигателя ток необходимой амплитуды, при сохранении алгоритма коммутации (Табл.1).
Эта задача решается с помощью создания на базе трёхфазного мостового инвертора контура тока с ШИМ.
Регулятор тока (ПИ-рег.) формирует сигнал задания напряжения обмоток (U), которое затем реализуется инвертором с ШИМ в соответствии с алгоритмом коммутации (Табл.1).
В качестве сигнала обратной связи в контуре можно использовать трёхфазно-выпрямленные сигналы датчиков тока фаз или сигнал датчика тока в звене постоянного тока инвертора ().
На основе рассмотренного канала управления моментом можно строить внешние контуры управления скоростью и положением.
Однако
Если бы токи в обмотках спадали до нуля и нарастали до нужного уровня мгновенно, то момент двигателя, определяемый их величиной, в установившемся режиме был бы постоянным. В действительности же реальные переходные процессы при коммутации обмоток приводят к пульсациям момента. В зависимости от параметров обмоток, а также соотношения величин текущей ЭДС и напряжения звена постоянного тока эти пульсации могут быть различны по длительности, амплитуде и знаку.
Кроме этих коммутационных пульсаций в рассматриваемой системе также будут иметь место пульсации момента на частоте ШИМ.
Ниже приведен пример работы модели системы регулирования скорости. Данная модель построена в среде SimInTech на элементах специализированного тулбокса «Электропривод». Среда позволяет получить максимальное приближение моделируемых процессов к реальности с учетом эффектов временной и уровневой дискретизации.
Часть модели, а именно — модель цифровой системы управления скоростью приведена ниже, на Рис.5. Регулятор скорости системы (Рег.W) выдает сигнал момента, который отрабатывается структурой, построенной в соответствии с Рис.4.
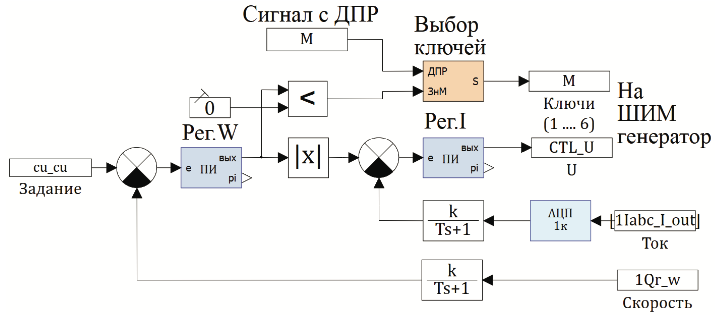
Рисунок 5. Модель цифровой системы управления
Для управления был выбран двигатель со следующими параметрами:
Rs = 2.875 Ом — сопротивление обмотки фазы;
Ls = 8.5e-3 Гн – индуктивность фазы;
F = 0.175 Вб – потокосцепление ротора;
Zp = 4 — число пар полюсов;
Jr = 0.06 кг·м 2 — момент инерции ротора.
Напряжение в звене постоянного тока привода было принято равным 100В.
В контуре тока электропривода использовалась ШИМ с частотой 5кГц.
В процессе регулирования происходило ступенчатое увеличение частоты при постоянном моменте сопротивления на валу двигателя (10 Нм).
Графики, полученные в процессе работы модели, приведены на Рис.6.
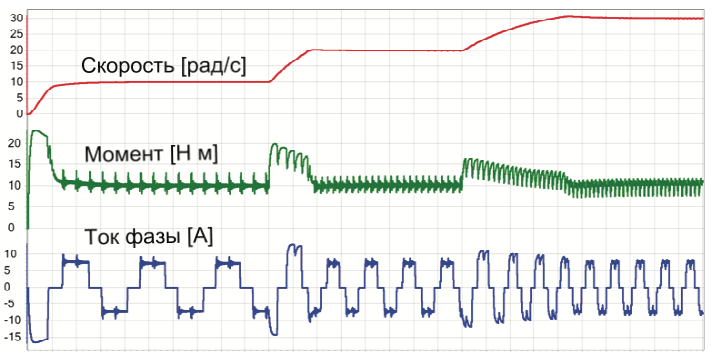
Рисунок 6. Моделирование работы двигателя
На графике момента видны существенные пульсации.
Отметим, что в основном они связаны именно с переходными процессами при коммутации обмоток и имеют соответственно частоту, ушестеренную по отношению к заданной.
Пульсации, связанные с ШИМ, в данном случае, невелики.
Заметим, что коммутационные пульсации существенно возрастают при увеличении момента, что связано с увеличением тока.
Несколько спасает то, что их влияние на скорость снижает инерция.
А можно ли векторно управлять СДПМт?
Если очень хочется — то можно.
Однако и здесь не без особенностей.
Математика и структура стандартной векторной системы управления исходит из синусоидальности поля в зазоре. При трапецеидальной ЭДС это условие нарушается, правда не очень сильно (трапеция это же почти синус).
А результатом этого «почти» будут, опять же, пульсации момента.
Вид модели цифровой системы векторного управления скоростью в среде SimInTech показан на Рис.7.
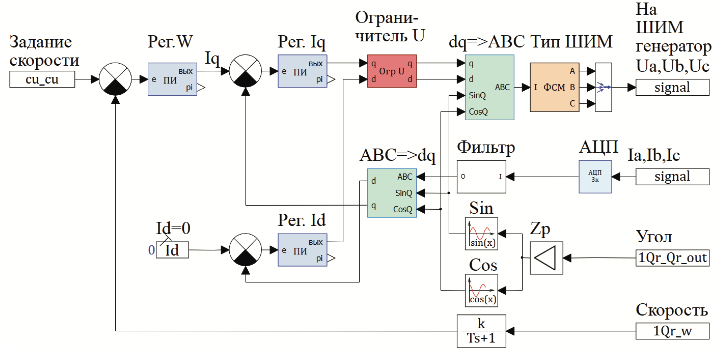
Рисунок 7. Часть модели векторного управления.
Ниже на Рис.8 показан график работы модели уже рассмотренного ранее СДПМт работающего в рассмотренном ранее режиме, но под управлением векторной системы.
В графике момента мы опять наблюдаем пульсации (хотя по сравнению с предыдущим вариантом они несколько уменьшились).
Причины пульсации при векторном управлении и управлении по ДПР различны, но частота все та же – ушестеренная по отношению к заданной.
Заметим, что вследствие несинусоидальности ЭДС токи в обмотках двигателя так же будут принципиально несинусоидальными (это так, хотя в масштабе рисунка и не слишком заметно).
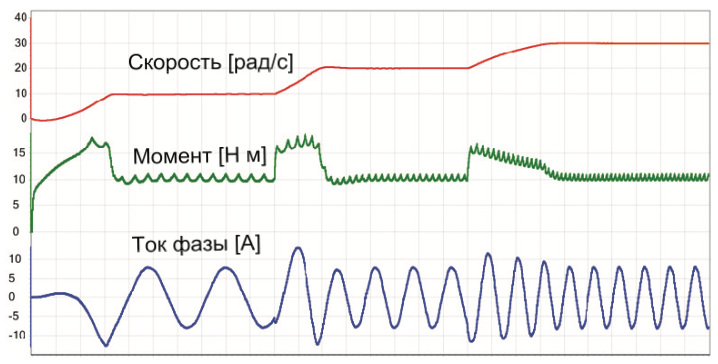
Рисунок 8. Работа двигателя при векторном управлении
А можно ли с помощью коммутации обмоток по ДПР управлять двигателем с синусоидальной ЭДС?
С точки зрения автора можно – но не нужно.

Наряду с коммутационными пульсациями момента синусоидальность ЭДС (отсутствие плоской вершины трапеции) в данном случае неминуемо вызовет еще и дополнительные пульсации, снижающие качество регулирования даже по сравнению с управляемым по ДПР двигателем СДПМт.
А при векторном управлении двигателем с синусоидальной ЭДС пульсаций момента не будет.
Для подтверждения этого тезиса ниже (Рис.9) приведены графики работы модели двигателя с уже рассмотренными ранее параметрами, но с синусоидальной ЭДС и векторной системой управления скоростью.
Видно, что пульсации момента в этом случае практически отсутствуют. При правильной настройке регуляторов системы они связаны только с ШИМ-преобразованием и для данного случая почти не видны.
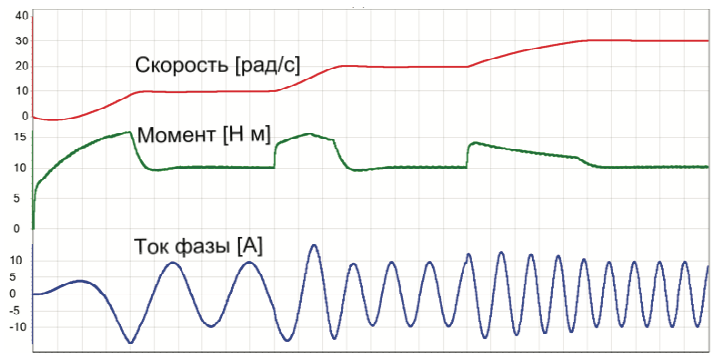
Рисунок 8. Работа двигателя с синусоидальной ЭДС
Итоги
Для синхронников с трапецеидальной ЭДС — коммутация по ДПР.
Так же возможно использование и более сложного векторного алгоритма регулирования, что может дать снижение уровня пульсации момента.
Для синхронников с синусоидальной ЭДС лучший вариант это векторное регулирование.
Это сочетание идеально для построения точного электропривода (что собственно и так было понятно).