Автоматическая регулировка усиления
Автоматическая регулировка усиления обеспечивает поддержание на выходе усилителя промежуточной частоты уровня сигнала, достаточно высокого и стабильного для воспроизведения сообщений от радиостанций рахтичной мощности, находящихся на разных расстояния и в меняющихся условиях распространения радиоволн. Если уровен сигнала окажется не достаточно высоким, т. е. менее 1 В для кремниевых диодов и менее 0,4 В для германиевых, то в детекторах приемников появятся нелинейные искажения. Если уровень сигнала буде слишком большим, то в выходных каскадах УПЧ могут появиться искажения, вызванные ограничением сигнала. Для исключения этих искажений и используется система АРУ.
Основной тип АРУ, применяемый в современных приемниках, это так называемая обратная система АРУ или «АРУ назад». Ее структурная схема представлена на рис. 4.27.
При использовании этой схемы сигнал с выхода регулируемого усилителя (РУ) поступает на амплитудный детектор (АД). В выходном напряжении АД присутствуют как быстро изменяющиеся составляющие, вызванные амплитудной модуляцией сигнала, так и медленно меняющиеся, квази постоя иные составляющие, пропорциональны среднему уровню сигнала. Быстроменяющиеся составляющие подавляются в ФНЧ, а медленно меняющиеся могут быть усилены с помощью усилителя постоянного тока и переданы в РУ для регулировки усиления. Так же в детектор может вводиться напряжение задержки которое не позволяет появиться на его выходе напряжению до тех пор пока входной сигнал АД не превысит некий порог Ег.
Рис. 4.27. Структурная схема системы АРУ
В зависимости от режимов работы усилителя и детектора АРУ различают такие виды АРУ, как:
- 1. Простая АРУ: то есть коэффициент усиления усилителя АРУ равен 1, либо усилитель отсутствует, а детектор не имеет задержки по напряжению.
- 2. Усиленная АРУ: то есть коэффициент усиления усилителя АРУВ значителен. Это приводит к тому, что зависимость выходного напряжения от входного уменьшается.
- 3. Усиленно-задержанная АРУ: то есть коэффициент усилени усилителя АРУ значителен. А так же детектор имеет задержку по напряжению, то есть он начинает открываться только если выходное напряжение регулируемого усилителя превысит некий порог. Эта мер позволяет не уменьшать коэффициент усиления РУ при малых уровнях сигнала на входе приемника.
Для каждого вида АРУ характерна своя собственная статическая характеристика. Это амплитудная характеристика усилителя с АРУ каждая точка которой соответствует установившемуся режиму регулирования. Примеры этих характеристик приведены на рис. 4.28.

Рис. 4.28. Статические характеристики системы АРУ:
I — без АРУ; 2 — простая АРУ; 3 — усиленная АРУ; 4 — усиленно-задержанная АРУ
Для регулировки коэффициента усиления в РУ возможно использование нескольких способов:
1. Изменение коэффициента усиления каскада Кй за счет изменения крутизны усилительного прибора, например, за счет изменения его режима работы. Это так называемая «режимная» регулировка Можно подавать постоянное дополнительное смещение на базу транзистора (пример см. на рис. 4.29) или на затвор полевого транзистора в том числе и двухзатворного.

Рис. 4.29. Схема режимной регулировки усиления
- 2. Изменение добротности или затухания контуров усилителе за счет параллельного включения управляемых активных сопротивлений. Например, полевых или биполярных транзисторов, опторезисторов и т.д. Этот способ связан с изменением селективности.
- 3. Использование электронно-управляемых аттенюаторов, включенных между каскадами. Схема простейшего аттенюатора приведе на рис. 4.30.

Рис. 4.30. Схема управляемого аттенюатора
- 4. Импульсные регуляторы на основе ШИМ модуляции.
- 5. За счет регулировки крутизны преобразования смесителя, путем изменения амплитуды напряжения гетеродина.
Чаще всего используют режимную регулировку и управляемые аттенюаторы.
Для анализа и расчета системы АРУ регулируемые усилители следует описать регулировочной характеристикой усилителя. Это зависимость коэффициента усиления К0 от регулировочного напряжения иРЕГ. Пример такой характеристики и ее аппроксимация прямой представлены на рис. 4.31.

Рис. 4.31. Регулировочная характеристика РУ
Так же для усилителя вводится понятие крутизны регулировочной характеристики:

Эта величина показывает, насколько велико изменение коэффициента усиления РУ при изменении регулировочного напряжения. Средняя крутизна регулировочной характеристики (для линейной аппроксимации) определяется схемотехникой регулятора усиления и использованными в нем элементами.
В качестве меры эффективности АРУ используется соотношение изменения входного напряжения (в дБ) к изменению выходного напряжения (в дБ). Например, КАРУ = 70дБ/3 дБ. Это означает, что пр изменении входного напряжения на 70 дБ выходное напряжение изменится на 3 дБ.
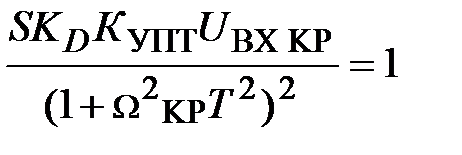
Эффективность АРУ зависит от коэффициента усиления УПТ и крутизны регулировки. Для расчета системы АРУ следует рассчитать произведение

где А’унт — коэффициент усиления УПТ в системе АРУ; 6/ВХт(п — минимальное напряжение на входе усилителя, при котором обеспечивается нормальное напряжение на выходе, определяемое чувствительность приемника; с!вх и с1вых — диапазоны изменения входного и выходног напряжения усилителя в разах, выбранные исходя из требуемой эффективности АРУ.
Далее следует задаться либо Кут, либо 5РЕГ и, зная величину их произведения, найти оставшийся параметр. Обычно проще рассчитать крутизну регулировочной характеристики по принципиально схеме регулируемого усилителя, а затем вычислить Кут по полученному произведению Кут *$рег- Далее построить и рассчитать УПТ дл системы АРУ с полученным значением коэффициента усиления.
ФНЧ системы АРУ строятся, как правило, в виде однозвенных Г-образных /?С-цепочек. В случае использования многозвенного фильтра возможно самовозбуждение системы АРУ. При расчете ФНЧ в системе АРУ следует обращать внимание на величину постоянной времени /?С-цепочки, именно ею определяется время реакции систем АРУ на изменение амплитуды сигнала. Для того чтобы наличие ФНЧВ не влияло на глубину модуляции, постоянная времени должна быт достаточно велика. Для приемников связи и вещания постоянная времени ФНЧ обычно составляет около 0,1 с.
При построении усилителей с АРУ импульсных сигналов использование инерциальной АРУ малоэффективно, так как скважность импульсов и разброс их амплитуд могут быть очень велики. Поэтому используется быстродействующая система АРУ (БАРУ), постоянна времени фильтра такой системы сравнима с длительностью импульса. Из-за этого невозможно получить большую глубину регулирования, поэтому применяют последовательное включение большого числа каскадов с собственной АРУ в каждом.
Принцип автоматической регулировки усиления в приемниках (АРУ).
Напряжение входного сигнала приёмника может изменяться в очень больших пределах на 40…80 дБ (10 2 …10 4 раз), что вызывает изменение уровня, а, следовательно, и мощности сигнала на выходе приёмника. Для защиты оконечных устройств от перегрузки необходимо регулировать усиление приёмника в таких же пределах. Ручная регулировка усиления позволяет обеспечить нормальную работу приёмника только при очень медленных изменениях уровня входного сигнала, например, при перестройке с одной радиостанции на другую, да и то – сопряжена с эксплуатационными неудобствами. При больших скоростях изменения уровня входного сигнала, например при быстрых замираниях радиоволн, необходимо использовать автоматическую регулировку усиления (АРУ).
Таким образом, АРУ должна обеспечить относительное постоянство напряжения сигнала на выходе детектора и приёмника при изменении напряжения сигнала на входе РПУ.
Рассмотрим наиболее часто применяемую инерционную систему АРУ непрерывного действия с обратным регулированием (за счёт обратной связи по постоянному току) (Рис.2).
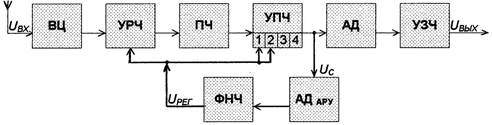
Рис.2 Структурная схема АРУ.
Приведённая на Рис.2 схема АРУ обеспечивает уменьшения усиления УРЧ и УПЧ при увеличении уровня входного сигнала UВХ и, наоборот, увеличение усиления при снижении уровня сигнала. Регулировка осуществляется за счёт отбора энергии полезного сигнала UС и преобразования его в постоянное регулирующее напряжение UРЕГ, изменяющееся пропорционально амплитуде входного сигнала UВХ. Этим напряжением регулируется усиление каскадов УРЧ и некоторых каскадов УПЧ так, чтобы уровень выходного напряжения UВЫХ практически не изменялся.
Сигнал промежуточной частоты UС = UПР с выхода УПЧ детектируется амплитудным детектором АРУ (АДАРУ) и фильтруется в ФНЧ с постоянной времени tФНЧ = 0,1…0,3 сек.
Большее значение tФНЧ > 0,3 сек приведёт к недопустимому увеличению инерционности системы АРУ, что будет заметно на слух при резком изменении уровня входного сигнала.
Меньшее значение tФНЧ < 0,1 сек, из-за недостаточной фильтрации звуковых частот может привести к демодуляции сигнала и появлению искажений.
Регулировка усиления каскадов может осуществляться различными способами:
— изменением крутизны характеристики усилительных элементов (КU = S RН);
— изменением сопротивления нагрузки усилительных элементов (КU = S RН);
— изменением напряжения питания усилительных элементов (КU
Два последних способа менее эффективны, так как пределы регулировки усиления не превышают 2…4 раза на один каскад. Регулировка за счёт изменения режима работы транзистора по базовой цепи (изменением крутизны входной динамической характеристики) позволяет изменять усиление каскада в 8…10 раз.
Для этой цели разработаны специальные транзисторы с переменной крутизной, в которых растянутый начальный участок входной динамической характеристики позволяет плавно и в широких пределах изменять её крутизну (Рис.3). К таким транзисторам можно отнести ГТ328, ГТ346, КТ3127, КП307 и много других.
На Рис.3 видно, что при увеличении начального базового смещения U’0Б > U0Б рабочая точка перемещается на участок с большей крутизной входной динамической характеристики. При этом амплитуда базового тока увеличивается I’Бm > IБm за счёт увеличения усиления транзистора.
Изменение U0Б происходит автоматически по системе АРУ при помощи регулирующего напряжения UРЕГ.
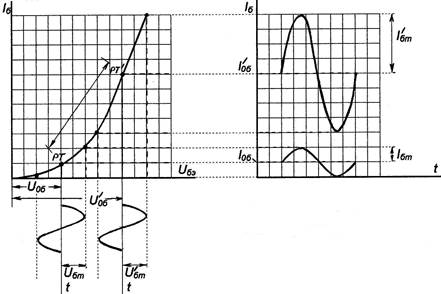
Рис.3 Пояснение принципа регулировки усиления транзистора изменением напряжения базового смещения U0Б.
При выборе каскадов для регулировки усиления в системе АРУ необходимо учитывать следующее:
1. Амплитуда усиливаемого сигнала должна быть малой, чтобы использование нелинейных участков характеристик транзисторов не привело к появлению нелинейных искажений. С этой точки зрения пригодны все каскады УРЧ и первые каскады УПЧ.
2. Нельзя использовать в качестве регулируемых узкополосные полосовые усилители с нагрузкой в виде ФСС или пьезофильтров. Значительное изменение режимов работы транзисторов может привести к изменению межэлектродных ёмкостей транзистора, а следовательно к расстройке избирательной системы.
3. Нельзя регулировать усиление в смесительных каскада преобразователей частоты, так как при этом нарушается оптимальный режим их работы.
На Рис.4 приведены амплитудные характеристики приёмника для различных типов АРУ.
Если в приёмнике отсутствует АРУ, то зависимость амплитуды выходного напряжения от амплитуды входного UВЫХ = ƒ(UВХ) соответствует кривой 1. При слабых сигналах она линейна, а при сильных в последних каскадах приёмника наступает перегрузка и усиление приёмника уменьшается, что приводит к появлению искажений.
При наличии простой АРУ (кривая 2) регулирующее напряжение создаётся и используется при любых амплитудах входного сигнала. Недостатком простой АРУ является то, что усиление приёмника снижается не только для сильных сигналов, но и для самых слабых (хотя и в меньшей степени), для приёма которых необходимо использовать полное усиление приёмника.
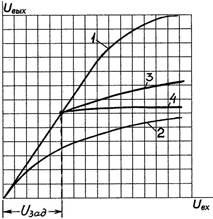 |
Рис.4 Амплитудные харктеристики приёмника. 1 – без АРУ; 2 – с простой АРУ; 3 – при задержанной АРУ; 4 – при задержанной и усиленной АРУ. |
Этот недостаток устраняется в задержанной АРУ (кривая 3), где регулирование начинается тогда, когда напряжение на входе приёмника достигнет определённого уровня. Подобный режим можно получить, если подать на диод детектора АРУ некоторое запирающее напряжение, называемое напряжением задержки UЗАД. Его обычно выбирают равным амплитуде напряжения на входе детектора, которое соответствуюет номинальной чувствительности приёмника UЗАД = UВХ.МИН. Таким образом при увеличении уровня сигнала от 0 до UВХ.МИН система АРУ не действует и увеличение выходного напряжения происходит по кривой 1. После того как уровень сигнала превысит UЗАД, начинает действовать АРУ и выходное напряжение будет изменяться далее по кривой 3. Для регулирования усиления в высокочувствительных каскадах УРЧ применение АРУ с задержкой обязательно.
Для улучшения стабилизирующего действия системы АРУ в её шину вводят дополнительные усилители постоянного тока УПТ. Такая АРУ называется задержанной и усиленной (кривая 4).
Эффективность АРУ характеризуется следующими показателями:
— величиной изменения входного напряжения Д= UВХ.МАХ ⁄ UВХ.МИН;
— допустимой величиной изменения выходного напряжения В = UВЫХ.МАХ ⁄ UВЫХ.МИН;
— величиной изменения коэффициента усиления системой АРУ: Д ⁄ В (раз).
Для приёмников высшей группы сложности по отечественному стандарту Д = 40 дБ (100 раз), В = 6 дБ ( 1,7 раз).
Схема простой АРУ.
В незадержанной АРУ (Рис.5) детектор приёмника и детектор АРУ можно совместить в одном VD1C5R5C6. Включение диода VD1 позволяет выделить на нагрузке R6С6 постоянную составляющую напряжения отрицательной полярности, из которого после фильтрации в ФНЧ RАРУСАРУ образуется регулирующее напряжение – UРЕГ.
Начальное базовое смещение +U0Б транзистора VT1 первого каскада УПЧ образуется как сумма положительного напряжения +UПИТ, подаваемого от источника +ЕК через R2, L2 и отрицательного регулирующего напряжения — UАРУ. Причём +U0Б = +UПИТ – UАРУ, т.е. IUПИТI > IUАРУI.
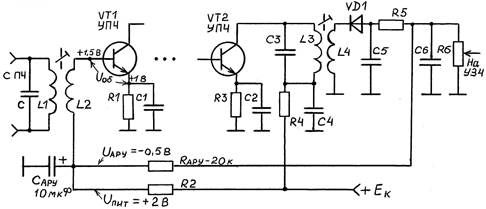
Рис.5 Принципиальная схема простой АРУ.
Чем больше амплитуда принимаемых сигналов UВХ, тем больше регулирующее напряжение – UАРУ, что приводит к уменьшению начального базового смещения +U0Б, крутизны характеристики транзистора S и усиления каскада УПЧ КU. В результате компенсации, выходное напряжение приёмника UВЫХ будет стабильно и мало зависеть от изменения уровня входного сигнала UВХ.
Постоянная времени АРУ, как было отмечено раньше, tАРУ = RАРУCАРУ = 0,1…0,3 сек. Учитывая, что в биполярных транзисторах базовый ток I0Б относительно большой и принимает значения десятки и сотни мкА, то сопротивление резистора RАРУ не может быть больше нескольких десятков кОм (по схеме RАРУ = 20 кОм). Конденсатор САРУ рассчитывается из соотношения САРУ = (0,1…0,3 с) ⁄ RАРУ = 10 мкФ.
Использование в регулирующих каскадах полевых транзисторов с большим входным сопротивлением позволяет увеличить RАРУ до 1…1,5 МОм. Тогда номинал САРУ составит всего 0,1 мкФ.
Сопротивление резистора обратной связи R1 должно быть незначительным, чтобы ООС не снижала эффективность регулировки системы АРУ.
Из-за уменьшении чувствительности приёмника при слабых сигналах простую АРУ нельзя использовать для регулировки усиления в каскадах УРЧ, так как при этом снижается отношение сигнал/шум.
Дата добавления: 2016-07-05 ; просмотров: 15201 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Переходные процессы в системах АРУ
Как известно, в радиовещательных приемниках аналоговых сигналов, использующих в преселекторе и тракте промежуточной частоты резонансные усилители, чаще всего находит применение режимная АРУ (рис. 12.1). Постоянная составляющая с детектора АРУ (детектор, специально предназначенный для формирования напряжения регулирования) или детектора сигнала, через дополнительный фильтр постоянной составляющей, управляющее напряжение (Ерег) подается на базы (эмиттеры) регулируемых усилителей, изменяет положение рабочей точки (крутизну) транзистора на проходной характеристике, а значит, и коэффициент усиления. При увеличении сигнала постоянное напряжение на нагрузке детектора возрастает. Однако, применяемая полярность включения диода, приводит к приращению отрицательной по знаку постоянной составляющей напряжения, что уменьшает напряжение на базе транзистора регулируемого усилителя и, как следствие, уменьшается крутизна его характеристики и коэффициент усиления.
Постоянная времени ЯС фильтра определяет скорость срабатывания регулировки, т.е. быстроту реакции системы АРУ на изменение напряжения на входе усилителя. Если постоянная времени мала, то при амплитудной модуляции сигнала, регулирующее напряжение будет содержать низкочастотную составляющую. При этом, если фильтр не вызывает фазового сдвига напряжения, то увеличение амплитуды сигнала в процессе модуляции будет приводить к синхронному изменению смещения на базе регулируемого и уменьшать усиление.
Уменьшение амплитуды будет сопровождаться увеличением коэффициента усиления. В результате в регулируемом усилителе будет происходить уменьшение глубины модуляции (демодуляция сигнала). Соотношение составляющих спектра выходного сигнала зависит также от параметров выходного фильтра (фазо-частотной характеристики), а отсюда и демодуляция будет проявляться по-разному на различных частотах, т.е. появятся частотные искажения.
В некоторых случаях фазовый сдвиг, вносимый фильтром, может приводить к возрастанию коэффициента модуляции, и одновременно увеличивать нелинейные искажения в детекторе и усилителе низкой частоты.
Слишком малая постоянная времени фильтра, приводит к плохой фильтрации напряжения низкой частоты, и будет вызывать изменение коэффициента усиления с частотой огибающей, т.е. изменению формы огибающей напряжения и появлению нелинейных искажений сигнала после детектирования.
Излишне большое значение постоянной времени фильтра будет приводить к тому, что регулирующее напряжение не будет успевать следовать за изменением сигнала при перестройке или кратковременных замираниях сигнала.
Рассмотрим процессы, протекающие в радиотракте, охваченном системой АРУ. В радиовещательных приемниках наибольшее распространение получила обратная усиленная АРУ, с одним — двумя каскадами с регулируемым усилением в структуре радиотракта. Структурная схема радиотракта, в котором применена обратная АРУ, приведена на рис. 12.7.
Усилительные каскады радиотракта, усиление которых определяется напряжением регулирования Ерег, представлены узлом с коэффициентом передачи К(Ерег), зависящим от регулирующего напряжения Ерег, которое создается на выходе фильтра низкой частоты Е(Ерег) при работе АРУ. Регулировочная характеристика радиотракта К= К(Ерег) (рис. 12.8) в общем случае имеет нелинейный характер, определяемый нелинейной зависимостью коэффициентов передачи регулируемых каскадов радиотракта от величины напряжения регулирования. Для упрощения анализа процессов в системе АРУ часто функцию К= К(Ерег) аппроксимируют линейной зависимостью (рисЛ 2.8)

где  — тангенс угла наклона характеристики.
— тангенс угла наклона характеристики.


Такая аппроксимация регулировочной характеристики при упрощении анализа приводит к некоторому завышению величины искажений огибающей при больших значениях
В предположении отсутствия в радиотракте нелинейных искажений, детектор обратной АРУ, в том числе усиленной, можно представить линейным звеном с коэффициентом передачи Кару (рис. 12.7). Упростим анализ системы обратной АРУ с задержкой, считая радиотракт широкополосным, когда изменение выходного напряжения ивых совпадает с изменением напряжения регулирования Ерег. Тогда при гармоническом воздействии на радиотракт с системой обратной АРУ с задержкой

вызывает появление на выходе сигнала

Если амплитуда выходного сигнала 112(0 меньше напряжения задержки Е3, то напряжение регулирования Ерег = 0 и коэффициент усиления будем максимальным Ко (рис. 12.8)

При амплитуде входного сигнала м/(7) — (7/ амплитуда выходного сигнала будет Е3, а 
При м/(7) > (7/ ты огибающая на выходе радиотракта будет определяться

причем изменение Ерег будет определяться уравнением

где Е(Ерег) — линейный дифференциальный оператор, описывающий процессы в ФНЧ.
Применение в качестве фильтра низкой частоты интегрирующей ЯС — цепочки, когда линейный дифференциальный оператор, описывается уравнением

Выражения (12.9), (12.10) и (12.11) приобретают вид

где 
При скачкообразном изменении уровня входного сигнала в момент времени t = 0 до значения ui(t) — Ui — const > Ui mi„ поведение системы АРУ в соответствии с (10.11) будет описываться неоднородным линейным дифференциальным уравнением с постоянными коэффициентами:

Полагая, что в начальный момент напряжение на конденсаторе равно нулю, т.е. при t = 0, U 1 = 0, то и напряжение и 2(0) = Ко U). При таких начальных условиях установившееся значение на выходе регулируемого усилителя, определяющееся (12.12) будет равно

Статическая характеристика системы АРУ с задержкой (рис. 12.6а) и определяется системой уравнений (12.16) 

Статическая характеристика системы АРУ без задержки описывается более простым соотношением (12.17), полученным из (12.16) при Ез =0 
и представлена сплошной кривой на рис. 12.96. Для сравнения штриховой линией на этих рисунках представлены кривые усиления радиотракта приемника без АРУ (V2= и 2
Сравнение формул (12.16) и (12.17) показывает, что введение задержки приводит к увеличению установившегося значения напряжения на величину Д?/ = Е3К1/1 / (1 + К111) . Отсюда следует, что чем выше напряжение задержки, тем при данном увеличении входного сигнала меньше Ерег и большее значение установившегося напряжения.
Качество регулирования, как видно из (12.16) и (12.17) повышается при увеличении К = а Кару, что определяется коэффициентом передачи цепи АРУ (Кару) и количеством регулируемых каскадов.
При воздействии сигнала с амплитудной модуляцией для случая гармонической огибающей и/ (0 = ино(1+т со801)со8(о)о1 +(р), где ино — амплитуда несущего колебания с частотой соо, т — коэффициент модуляции, О — частота модуляции и для одно- или двухзвенного ЯС — фильтра в цепи АРУ, выходное напряжение определяется решением уравнения (12.14). Использование в качестве фильтра однозвенной интегрирующей ЯС — цепи обеспечивает устойчивость системы АРУ при любой частоте модуляции. Однако неправильный выбор параметров ЯС — цепи может привести к существенным искажениям огибающей на выходе регулируемого усилителя. При использовании двухзвенного фильтра в цепи АРУ система АРУ возбуждается при определенном значении коэффициента модуляции. Генерация колебаний происходит в некоторой полосе частот модулирующего колебания и определяется параметрами фильтра.
Для малого значения коэффициента модуляции напряжение на выходе радиотракта в соответствие с (12.10) приближенно определяется

Считая, что коэффициенты модуляции на входе и выходе радиотракта можно рассматривать, как аи,(?) = дих (0/ м 1 (0;»Ь(0 = (0/ м 2 (0 > получим выражение для передаточной функции цепи АРУ, которое при постоянном значении амплитуды несущей ино можно записать

где Р(р) — передаточная функция ФНЧ в символической форме, а р — оператор дифференцирования. Тогда из (12.18) с учетом соотношения К = а Кару получим [3]

Соотношению (12.19) соответствует некоторая следящая система со структурной схемой (рис. 12.10)
В этой схеме радиотракт представлен передаточной функцией 1/КщР(р), охваченный обратной АРУ. Рассматривая ее свойства при использовании фильтра низких частот из одной интегрирующей ЯС — цепочки, когда Б(р) = 1/(РСр +1), передаточная функция системы АРУ для малых значений коэффициентов модуляции


где 
Для оценки амплитудно- и фазочастотных искажений, создаваемых в радиотракте, охваченном системой обратной АРУ, положим в (12.19)/; =?0 и вычислим модуль и фазу полученного комплексного коэффициента передачи, откуда

Графики, построенные на основании формул (12.21) и (12.22) показывают (рис. 12.11), что коэффициент модуляции на выходе всегда меньше коэффициента модуляции на входе, то есть существует подавление модуляции (рис. 12.11а). Для заданных Тф и ?2, подавление, обусловленное действием АРУ тем сильнее, чем выше уровень несущей. Это вызвано увеличением быстродействия по мере роста входного сигнала. Фаза огибающей выходного сигнала (рис. 12.11 б) опережает фазу входного сигнала. При малых бкф наблюдается резкое возрастание фазового сдвига с последующим уменьшением. Рабочей областью можно считать область больших значений Отф, где малы так же и амплитудные искажения. По заданной величине амплитудных или фазовых искажений можно определить постоянную времени фильтра цепи АРУ. Так, разрешая (12.21) относительно Тф, можно вычислить постоянную времени ЯС — фильтра по величине подавления амплитудной модуляции в системе АРУ (12.23)


Для радиовещательных и связных приемников АМ сигналов величина Тф = 0,02 -г- 0,2 с. Верхняя граница постоянной времени тф определяется быстродействием системы АРУ.
Система автоматической регулировки усиленияАРУ
Автоматическая регулировка усиления обеспечивает стабильность уровня сигнала на выходе усилителя при изменении уровня входного сигнала. В современных приёмниках уровень входного сигнала может изменяться в широких пределах: от 60 дБ в приёмниках радиосвязи и до 120 дБ в радиолокационных. Нормальная работа оконечного аппарата требует, чтобы изменения выходного сигнала приёмника не превышали 4-6 дБ. Для выполнения этих требований глубина регулировки усилителя системой АРУ должна составлять 56-116 дБ.
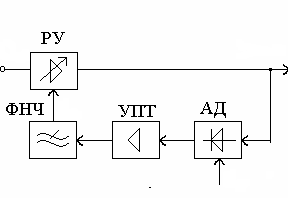
Функциональная схема приведена на рис.10, где приняты следующие обозначения: РУ – регулируемый усилитель; АД – амплитудный детектор; УПТ – усилитель постоянного тока; ФНЧ – фильтр нижних частот; U BX – напряжение входного сигнала; U ВЫХ – выходной сигнал; E З – напряжение задержки детектирования; E Р – напряжение регулировки.
Работает система АРУ следующим образом. При увеличении амплитуды входного сигнала U BX возрастает амплитуда выходного напряжения U ВЫХ:
где К (Е Р) – модуль резонансного коэффициента передачи усилителя, величина которого зависит от напряжения регулировки Е Р, вырабатываемого системой АРУ.
После амплитудного детектора выделяется выпрямленное напряжение U B, величина которого в случае задержанной АРУ равна:

где  – коэффициент передачи детектора;
– коэффициент передачи детектора;  – напряжение задержки.
– напряжение задержки.
Рис.10. Функциональная схема АРУ Выпрямленное детектором напряжение проходит через УПТ и ФНЧ и создаёт напряжение регулировки: Это напряжение подводится к регулируемым каскадам усилителя и уменьшает коэффициент усиления в соответствии с регулировочной характеристикой усилителя: K = K (E Р). Система АРУ, не имеющая УПТ и схемы задержки, называется простой АРУ. Её характеристики можно получить, положив Е З = 0 и К УПТ = 1. Схема АРУ, содержащая УПТ, называется усиленной, содержащая схему задержки – задержанной. Основными функциональными узлами системы АРУ считаются: регулируемый усилитель; амплитудный детектор со схемой задержки; усилитель постоянного тока; фильтр нижних частот. Важнейшей характеристикой регулируемого усилителя является его регулировочная характеристика – зависимость модуля резонансного коэффициента передачи от напряжения регулировки (рис.11). Отношение максимального усиления (коэффициента передачи) к минимальному называют глубиной регулировки. Глубина регулировки определяется выражениями
где Реальная регулировочная характеристика нелинейнанелинейная. При расчёте системы АРУ используются различные виды её аппроксимации: линейная, линейно-ломаная, экспоненциальная.
К наиболее простым соотношениям в системе АРУ приводит линейная аппроксимация регулировочной характеристики во всём допустимом диапазоне изменения Е Р: К 0(Е Р) = К 0 max – ‑ SE P, при E Pmin ≤ E P ≤ E Pmax, где S – средняя крутизна регулировочной характеристики (средняя чувствительность регулировки):
Основные способы регулировки усиления: — режимная регулировка (изменение крутизны проходной характеристики транзистора | Y21 | путём изменения режима его работы по постоянному току); — изменение сопротивления нагрузки усилителя; — изменение глубины обратной связи; — изменение величины межкаскадной связи с помощью управляемых аттенюаторов; — изменение степени связи контура с транзистором. От устройств регулировки требуются: существенная зависимость К O от Е Р; малый ток регулировки; малая зависимость других параметров усилителя от напряжения Е Р. На рис.12 показан принцип регулировки усиления транзистора путём изменения его режима по постоянному току. Регулировка усиления достигается за счёт изменения тока эмиттера. Регулирующее напряжение подаётся в цепь базы транзистора. Напряжение смещения на базе транзистора:
|
 , или
, или  ,
, — безразмерная глубина регулировки;
— безразмерная глубина регулировки;  — глубина регулировки, дБ;
— глубина регулировки, дБ;  ,
,  — максимальный и минимальный коэффициенты усиления.
— максимальный и минимальный коэффициенты усиления. ,
,  ─ напряжения регулировки, соответствующие максимальному и минимальному усилению.
─ напряжения регулировки, соответствующие максимальному и минимальному усилению. ,
,

 .
. .
. дБ.
дБ.
 — комплексные коэффициенты модуляции входного и выходного сигналов усилителя по амплитуде. Зависимость модуля |
— комплексные коэффициенты модуляции входного и выходного сигналов усилителя по амплитуде. Зависимость модуля |  | от частоты модуляции приводит к амплитудно-частотным искажениям сигнала.
| от частоты модуляции приводит к амплитудно-частотным искажениям сигнала.
 | во всём диапазоне изменения частот модуляции. В этом случае также практически отсутствуют и нелинейные искажения. В связи со сказанным, постоянная времени ФНЧ выбирается из условия
| во всём диапазоне изменения частот модуляции. В этом случае также практически отсутствуют и нелинейные искажения. В связи со сказанным, постоянная времени ФНЧ выбирается из условия
 ,
, ,
, ─ запаздывание сигнала в усилителе; П – полоса пропускания регулируемого усилителя по уровню 0,7; Т – постоянная времени ФНЧ.
─ запаздывание сигнала в усилителе; П – полоса пропускания регулируемого усилителя по уровню 0,7; Т – постоянная времени ФНЧ. ,
, .
. ,
, ,
, – частота самовозбуждения АРУ, Гц,
– частота самовозбуждения АРУ, Гц,  – амплитуда входного сигнала, при которой начинается самовозбуждение АРУ, В.
– амплитуда входного сигнала, при которой начинается самовозбуждение АРУ, В.