Kugoo S3 — общая тема
 Сообщить модераторам
Сообщить модераторам
 Информация
Информация


Рейтинг модели: 3.6
Важно!
В батарее может оказаться 20 банок вместо 30!
Важно!
Ориентировочно с апреля 2021 на мотор колесе S3 от JILONG нанесена неверная гравировка JILNG и отсутствует маркировка мощности.


Поделиться
Сообщить модераторам
Информация
Не так давно появился в продаже Kugoo S3, может кто уже приобрёл или имел удовольствие протестировать поделитесь пожалуйста.
И какой магазин можете посоветовать, их огромное кол-во какому доверять можно?
 1
1





Поделиться
Сообщить модераторам
Информация
все в теме s2 (включая сравнительные фото).
из существенных отличий — задний фонарь со стоп-сигналом и видоизмененные уши механизма складывания (с виду более толстые, реально — пустотелые).
из несущественных — иные пластиковые крышки, немного другая форма деки, дешевое мотор-колесо (но то сейчас на всех последних кугах) без маркировки.
и еще — на s3 в стоке работает передний амо.
в остальном — s2
1

Поделиться
Сообщить модераторам
Информация
Из СУЩЕСТВЕННЫХ отличий в s3 батарея 12ач а не 8.8

Поделиться
Сообщить модераторам
Информация
Из СУЩЕСТВЕННЫХ отличий в s3 батарея 12ач а не 8.8
Не батарея 12Ач, а наклейка на батарее. Да и 8,8 пока никому намерить не удалось. Максимум попадались 7,8Ач.
2
Поделиться
Сообщить модераторам
Информация
Не батарея 12Ач, а наклейка на батарее. Да и 8,8 пока никому намерить не удалось. Максимум попадались 7,8Ач.
С этим согласен. Разговаривал с владельцем s3 в мцк вместе ехали. Говорит 15-20км проезжает. Вес у него около 75-80. Короче нет там 12 наверно
Поделиться
Сообщить модераторам
Информация
Я при весе 78 кг, проехал, на скорости 27км/ч, 18.5 км, а по времени со всеми остановками на бордюрчики, рельсы и люди,. 1,23 ч. На первой скорости в 17 км я ездил 2 часа, проехал 22 км и тест не закончил. наступила ночь и я устал и замерз. Как то так. Мой S3 это S2 с подножкой и активным стоп-сигналом.
Поделиться
Сообщить модераторам
Информация
Купили с женой 2 самоката Kugoo S3. Катаемся неделю на них. Пробег около 100 км. Мой вес 100+ кг. Пока только один раз разрядился полностью, благо что недалеко от дома. Поэтому не понятно сколько у него запас хода. 15 км точно проезжает. По скорости на 3-й передаче разгонял его до 33 км/ч. Это по прямой, не с горки. По GPS не мерил, если честно динамики хватает для езды по городу.
Про отличия между моделями все сказали, стоп-сигнал работает, маркировка на колесе есть, пружины работают обе — и впереди и сзади. Заднюю я себе затянул потуже, жене расслабил, иначе она вообще не работает.
Из проблем. В самый первый день с моим самокатом была странность — он начал вырубаться. Сначала перестал работать спидометр и амперметр — при этом спидометр моргал. Потом он стал выключаться во время движения. Решилось тем, что я выдернул штекер около мотор-колеса и воткнул обратно. Подозреваю, что был слабый контакт.
Пару дней назад на втором самокате стал эпизодически отказываться работать курок газа. Т.е. самокат работает, все ок, но на газ не реагирует. Работать начинало через неск. попыток. Нашел ветки на форуме о проблеме в S2 с тем, что под платой дисплея откручиваются болты и коротят плату — разобрал, подкрутил. Пока работает стабильно.
Из модификаций опять же по форуму — срезал стяжки у мотор-колеса. Об этом много пишут.
Как-то так. Пишите, если есть какие-то вопросы. Хотя я начинающий ездок. Скорее сам буду спрашивать.
как узнать количество магнитов в мотор колесе
Ментальная карта. Все знания по мотор-колесам в одном месте только для профессионалов
 Мотор-колесо состоит из выполненного на оси и встраиваемого в колесо электродвигателя, силовой передачи и тормозной системы. Такой электромотор вращает колесо без цепи, шестерен и других вспомогательных инструментов для передачи тяги. Он вращается вокруг собственной оси, закрепленной на вилке е-байка. Основными преимуществами мотор-колес являются:
Мотор-колесо состоит из выполненного на оси и встраиваемого в колесо электродвигателя, силовой передачи и тормозной системы. Такой электромотор вращает колесо без цепи, шестерен и других вспомогательных инструментов для передачи тяги. Он вращается вокруг собственной оси, закрепленной на вилке е-байка. Основными преимуществами мотор-колес являются:
Принцип работы мотор-колеса
Магнитное поле, создаваемое в статоре мотор-колеса, действует на магниты ротора и вращает его. Статор изготавливается в форме многолучевой звезды из электротехнической стали. На лучах этой звезды расположены обмотки. При протекании тока лучи приобретают магнитные свойства и притягивают к себе магниты ротора. Многочисленные обмотки обеспечивают электромотору требуемую мощность и плавное вращение ротора.
Чтобы ротор непрерывно вращался, достаточно последовательно в определенные моменты времени подавать на обмотки импульсы напряжения. При близости к магниту проявляются магнитные свойства обмоток. Моменты подачи напряжения определяют 3 датчика Холла, находящиеся в статоре.
Они отправляют сигнал на контроллер, и он посылает импульсы напряжения на обмотки. В результате они превращаются в электромагниты. Магниты ротора притягиваются и тем самым вращают его. Скорость вращения регулируется ручкой газа и меняется в зависимости от напряжения, подаваемого на обмотки. При торможении питание электромотора отключается при помощи датчиков в тормозных рычагах.
Типы мотор-колес
 Ступичные электромоторы бывают:
Ступичные электромоторы бывают:
Прямоприводные мотор-колеса имеют максимально надежную конструкцию без трущихся элементов, обеспечивают отличную динамику разгона и долго служат без необходимости в техобслуживании. Они работают без люфта, шума и вибрации, имеют большой крутящий момент и высокий КПД, позволяют развивать значительные скорости.
В чем секрет мотор-колеса Дуюнова
Мотор-колесо Дуюнова – это асинхронный двигатель без постоянных магнитов, использующий особую обмотку «славянка». В нем магнитное поле создают сами обмотки при подаче на них тока. Вращение колеса происходит при повороте поля под управлением контроллера. Совмещенная обмотка «славянка» уменьшает нагрузки на обмотки, повышает их температуру и продлевает срок службы мотора. Также есть мнение, что такой конструктив позволяет уменьшить на 15% пусковой ток и повысить на 30% энергоэффективность мотора.
Как подобрать мотор-колесо
 При выборе ступичного электромотора нужно учитывать условия его предстоящего использования, пожелания владельца к развиваемой скорости и тяговым характеристикам двигателя. Для спокойной езды по городу и местности с незначительными перепадами высоты рекомендуется использовать редукторный электромотор мощностью 250–350 Вт. Для сравнения, прямоприводный мотор мощностью 500 Вт имеет крутящий момент, как у редукторного двигателя на 350 Вт, но позволяет развивать скорость до 45 км/ч.
При выборе ступичного электромотора нужно учитывать условия его предстоящего использования, пожелания владельца к развиваемой скорости и тяговым характеристикам двигателя. Для спокойной езды по городу и местности с незначительными перепадами высоты рекомендуется использовать редукторный электромотор мощностью 250–350 Вт. Для сравнения, прямоприводный мотор мощностью 500 Вт имеет крутящий момент, как у редукторного двигателя на 350 Вт, но позволяет развивать скорость до 45 км/ч.
Электромотор на 600–750 Вт обеспечивает скоростную езду по шоссе и легкий подъем в гору. При увеличении мощности до 800–1000 Вт получаем еще лучшие скоростные показатели и увеличенный крутящий момент. Это отличный выбор для езды по бездорожью, преодоления крутых горок и затяжных подъемов. Также для езды в горной местности и уверенного преодоления подъемов рекомендуется установка электромоторов мощностью 600–1000 Вт на оба колеса.
Как проверить мотор-колесо
Для проверки исправности мотор-колес используются специальные тестеры. Такой прибор позволяет быстро проверить исправность электромотора, включая состояние обмоток и датчиков Холла, последовательность фаз и фазовый угол. Также данный тестер используется для проверки состояния контроллера.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)


Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса

Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:

В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.

Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).

Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.

В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.

Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов

В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.

Рассмотрим реальную схему обмотки.

Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.

Обмотки зубьев могут соединяться и параллельно.

Так же могут быть комбинированные включения

Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Датчики положения

Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:


Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.

На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник

При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Как узнать количество магнитов в мотор колесе
Как узнать количество магнитов в мотор колесе
Re: Чем отличается мотор-колесо 500Вт от мотор-колеса 1000ВТ
Сообщение eVel » 10 апр 2013, 15:51
Однако вес этого мотора близок к киловаттному, 6,5кг. Почему? вроде как и магниты меньше и обмоток меньше и корпус больше из алюминия, чем стали. Но здесь добавил веса фривил и большой подшипник со стороны фривила.
Выводы:
Мотор-колеса 500Вт, 750Вт, 1000Вт могут быть внешне идентичны, однако «железо» разное.
Чем меньше жил в одном витке обмоток — тем меньше будет максимальная скорость на одном и том же напряжении,
но крутящий момент на старте и низких оборотах будет ощутимо сильнее при одном и том же токе.
В итоге Моторы комплектуются и соответсвующими контроллерами. (как правило 500Вт — 20А, 750Вт — 25А, 1000Вт — 30А).
То есть киловатное колесо может набирать скорость до 50кмч, но на старте у него потребление будет 25-30А.
500 ваттное колесо будет разгоняться до 35-38кмч, но на старте ему будет достаточно 15-20А.
750Вт колесо разгонится до 42-45кмч, на старте ему достаточно 20-25А.
То есть теоретически 500Вт все таки экономнее засчет меньшего максимально тока, однако, если вы часто используете мотор для набора скорости — то киловаттный мотор может оказаться даже экономичнее. Вам просто понадобится меньше времени на разгон, хоть и при большем потреблении. Для поддержания средней скорости эти двигатели будут потреблять практически одинаково, до 10А. Только у киловаттного колеса средняя скорость выше.
Такие конфигурации обмоток не используются в 100% случаев. Это средние наиболее часто используемые как оптимальное соотношение скорости и тяги. Есть более скоростные 500Вт и менее скоростные 1000Вт мотор-колеса, разница в обмотках ( 10*6 будет быстрее, чем 6*10, но меньше крутящий момент. Стоит обратить внимание, что общее количество меди при этом на обмотках не изменится). Однако, увеличивая скорость повышением количества жил в витке — получаете очень большой расход энергии на старте и разгоне, т.к. тяги нет, а ток идет. В момент, когда мотор-колесо трогается с места, КПД его наименьший. Поэтому для повышения скорости повышают напряжение сети.
Средние показатели максимальной скорости при 48В:
500Вт — 35кмч
750Вт — 43кмч
1000Вт — 50кмч
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
Наиболее предпочтительна схема 6 групп по 2 зуба.
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Датчики положения
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Ментальная карта. Все знания по мотор-колесам в одном месте только для профессионалов
Мотор-колесо состоит из выполненного на оси и встраиваемого в колесо электродвигателя, силовой передачи и тормозной системы. Такой электромотор вращает колесо без цепи, шестерен и других вспомогательных инструментов для передачи тяги. Он вращается вокруг собственной оси, закрепленной на вилке е-байка. Основными преимуществами мотор-колес являются:
Принцип работы мотор-колеса
Магнитное поле, создаваемое в статоре мотор-колеса, действует на магниты ротора и вращает его. Статор изготавливается в форме многолучевой звезды из электротехнической стали. На лучах этой звезды расположены обмотки. При протекании тока лучи приобретают магнитные свойства и притягивают к себе магниты ротора. Многочисленные обмотки обеспечивают электромотору требуемую мощность и плавное вращение ротора.
Чтобы ротор непрерывно вращался, достаточно последовательно в определенные моменты времени подавать на обмотки импульсы напряжения. При близости к магниту проявляются магнитные свойства обмоток. Моменты подачи напряжения определяют 3 датчика Холла, находящиеся в статоре.
Они отправляют сигнал на контроллер, и он посылает импульсы напряжения на обмотки. В результате они превращаются в электромагниты. Магниты ротора притягиваются и тем самым вращают его. Скорость вращения регулируется ручкой газа и меняется в зависимости от напряжения, подаваемого на обмотки. При торможении питание электромотора отключается при помощи датчиков в тормозных рычагах.
Типы мотор-колес
Ступичные электромоторы бывают:
Прямоприводные мотор-колеса имеют максимально надежную конструкцию без трущихся элементов, обеспечивают отличную динамику разгона и долго служат без необходимости в техобслуживании. Они работают без люфта, шума и вибрации, имеют большой крутящий момент и высокий КПД, позволяют развивать значительные скорости.
В чем секрет мотор-колеса Дуюнова
Мотор-колесо Дуюнова – это асинхронный двигатель без постоянных магнитов, использующий особую обмотку «славянка». В нем магнитное поле создают сами обмотки при подаче на них тока. Вращение колеса происходит при повороте поля под управлением контроллера. Совмещенная обмотка «славянка» уменьшает нагрузки на обмотки, повышает их температуру и продлевает срок службы мотора. Также есть мнение, что такой конструктив позволяет уменьшить на 15% пусковой ток и повысить на 30% энергоэффективность мотора.
Как подобрать мотор-колесо
При выборе ступичного электромотора нужно учитывать условия его предстоящего использования, пожелания владельца к развиваемой скорости и тяговым характеристикам двигателя. Для спокойной езды по городу и местности с незначительными перепадами высоты рекомендуется использовать редукторный электромотор мощностью 250–350 Вт. Для сравнения, прямоприводный мотор мощностью 500 Вт имеет крутящий момент, как у редукторного двигателя на 350 Вт, но позволяет развивать скорость до 45 км/ч.
Электромотор на 600–750 Вт обеспечивает скоростную езду по шоссе и легкий подъем в гору. При увеличении мощности до 800–1000 Вт получаем еще лучшие скоростные показатели и увеличенный крутящий момент. Это отличный выбор для езды по бездорожью, преодоления крутых горок и затяжных подъемов. Также для езды в горной местности и уверенного преодоления подъемов рекомендуется установка электромоторов мощностью 600–1000 Вт на оба колеса.
Как проверить мотор-колесо
Для проверки исправности мотор-колес используются специальные тестеры. Такой прибор позволяет быстро проверить исправность электромотора, включая состояние обмоток и датчиков Холла, последовательность фаз и фазовый угол. Также данный тестер используется для проверки состояния контроллера.
Как узнать количество магнитов в мотор колесе
Однако вес этого мотора близок к киловаттному, 6,5кг. Почему? вроде как и магниты меньше и обмоток меньше и корпус больше из алюминия, чем стали. Но здесь добавил веса фривил и большой подшипник со стороны фривила.
Выводы:
Мотор-колеса 500Вт, 750Вт, 1000Вт могут быть внешне идентичны, однако «железо» разное.
Чем меньше жил в одном витке обмоток — тем меньше будет максимальная скорость на одном и том же напряжении,
но крутящий момент на старте и низких оборотах будет ощутимо сильнее при одном и том же токе.
В итоге Моторы комплектуются и соответсвующими контроллерами. (как правило 500Вт — 20А, 750Вт — 25А, 1000Вт — 30А).
То есть киловатное колесо может набирать скорость до 50кмч, но на старте у него потребление будет 25-30А.
500 ваттное колесо будет разгоняться до 35-38кмч, но на старте ему будет достаточно 15-20А.
750Вт колесо разгонится до 42-45кмч, на старте ему достаточно 20-25А.
То есть теоретически 500Вт все таки экономнее засчет меньшего максимально тока, однако, если вы часто используете мотор для набора скорости — то киловаттный мотор может оказаться даже экономичнее. Вам просто понадобится меньше времени на разгон, хоть и при большем потреблении. Для поддержания средней скорости эти двигатели будут потреблять практически одинаково, до 10А. Только у киловаттного колеса средняя скорость выше.
Такие конфигурации обмоток не используются в 100% случаев. Это средние наиболее часто используемые как оптимальное соотношение скорости и тяги. Есть более скоростные 500Вт и менее скоростные 1000Вт мотор-колеса, разница в обмотках ( 10*6 будет быстрее, чем 6*10, но меньше крутящий момент. Стоит обратить внимание, что общее количество меди при этом на обмотках не изменится). Однако, увеличивая скорость повышением количества жил в витке — получаете очень большой расход энергии на старте и разгоне, т.к. тяги нет, а ток идет. В момент, когда мотор-колесо трогается с места, КПД его наименьший. Поэтому для повышения скорости повышают напряжение сети.
Средние показатели максимальной скорости при 48В:
500Вт — 35кмч
750Вт — 43кмч
1000Вт — 50кмч
Kugoo S3 — общая тема

Сообщить модераторам Информация
Рейтинг модели: 3.6
Важно!
В батарее может оказаться 20 банок вместо 30!
Важно!
Ориентировочно с апреля 2021 на мотор колесе S3 от JILONG нанесена неверная гравировка JILNG и отсутствует маркировка мощности.
Поделиться Сообщить модераторам Информация
Не так давно появился в продаже Kugoo S3, может кто уже приобрёл или имел удовольствие протестировать поделитесь пожалуйста.
И какой магазин можете посоветовать, их огромное кол-во какому доверять можно?
1
Поделиться Сообщить модераторам Информация
все в теме s2 (включая сравнительные фото).
из существенных отличий — задний фонарь со стоп-сигналом и видоизмененные уши механизма складывания (с виду более толстые, реально — пустотелые).
из несущественных — иные пластиковые крышки, немного другая форма деки, дешевое мотор-колесо (но то сейчас на всех последних кугах) без маркировки.
и еще — на s3 в стоке работает передний амо.
в остальном — s2
1
Поделиться Сообщить модераторам Информация
Из СУЩЕСТВЕННЫХ отличий в s3 батарея 12ач а не 8.8
Поделиться Сообщить модераторам Информация
Из СУЩЕСТВЕННЫХ отличий в s3 батарея 12ач а не 8.8
Не батарея 12Ач, а наклейка на батарее. Да и 8,8 пока никому намерить не удалось. Максимум попадались 7,8Ач.
2
Поделиться Сообщить модераторам Информация
Не батарея 12Ач, а наклейка на батарее. Да и 8,8 пока никому намерить не удалось. Максимум попадались 7,8Ач.
С этим согласен. Разговаривал с владельцем s3 в мцк вместе ехали. Говорит 15-20км проезжает. Вес у него около 75-80. Короче нет там 12 наверно
Поделиться Сообщить модераторам Информация
Я при весе 78 кг, проехал, на скорости 27км/ч, 18.5 км, а по времени со всеми остановками на бордюрчики, рельсы и люди,. 1,23 ч. На первой скорости в 17 км я ездил 2 часа, проехал 22 км и тест не закончил. наступила ночь и я устал и замерз. Как то так. Мой S3 это S2 с подножкой и активным стоп-сигналом.
Поделиться Сообщить модераторам Информация
Купили с женой 2 самоката Kugoo S3. Катаемся неделю на них. Пробег около 100 км. Мой вес 100+ кг. Пока только один раз разрядился полностью, благо что недалеко от дома. Поэтому не понятно сколько у него запас хода. 15 км точно проезжает. По скорости на 3-й передаче разгонял его до 33 км/ч. Это по прямой, не с горки. По GPS не мерил, если честно динамики хватает для езды по городу.
Про отличия между моделями все сказали, стоп-сигнал работает, маркировка на колесе есть, пружины работают обе — и впереди и сзади. Заднюю я себе затянул потуже, жене расслабил, иначе она вообще не работает.
Из проблем. В самый первый день с моим самокатом была странность — он начал вырубаться. Сначала перестал работать спидометр и амперметр — при этом спидометр моргал. Потом он стал выключаться во время движения. Решилось тем, что я выдернул штекер около мотор-колеса и воткнул обратно. Подозреваю, что был слабый контакт.
Пару дней назад на втором самокате стал эпизодически отказываться работать курок газа. Т.е. самокат работает, все ок, но на газ не реагирует. Работать начинало через неск. попыток. Нашел ветки на форуме о проблеме в S2 с тем, что под платой дисплея откручиваются болты и коротят плату — разобрал, подкрутил. Пока работает стабильно.
Из модификаций опять же по форуму — срезал стяжки у мотор-колеса. Об этом много пишут.
Как-то так. Пишите, если есть какие-то вопросы. Хотя я начинающий ездок. Скорее сам буду спрашивать.
Уникальное мотор-колесо Шкондина, Дуюнова

Недавно наткнулся на уникальную в своем роде разработку нашего профессора Шкондина, живущего и работающего в г. Протвино МО.
Изучив поверхностно данное Ноу-Хау, я поразился унакальностью этого изобретения. Данное электрическое мотор-колесо может устанавливаться как на скутеры, мотоциклы так и на автомобили. Из-за унакально огромного КПД работы у этого изобретения будет большое будущее в нашей стране (надеюсь что изобретение не будет продано Китайцем или на Запад).
О Мотор-Колесе Шкондина говорят и пишут многие. И часто это происходит на уровне мифов и предположений. Мол, есть такое изобретение, и по многим параметрам оно просто замечательно, а вот как оно работает, практически никто не объяснил. Сам Василий Васильевич Шкондин отсылает всех к своим многочисленным отечественным и зарубежным патентам, где, якобы, всё написано, а если хотите производить такие колеса, то берите лицензии.
О Мотор-Колесе Шкондина в Интернете можно найти ряд интересных статей. Например, «Василий Шкондин – конструктор лучших в мире электровелосипедов». Или познакомиться с информацией о моторе Шкондина по ряду фильмов. Например, по адресу, где можно посмотреть сразу 25 фильмов. Эти же фильмы можно найти в Интернете и по другим адресам. Приведу лишь один из последних фильмов, созданных Старухиным.
Здесь можно посмотреть сведения о патентах, которые принадлежат Шкондину . А тут указаны данные про «ООО МОТОР-КОЛЕСО ШКОНДИНА».
Чтобы понять особенности мотор-колеса Шкондина, а проще, говоря, двигателя Шкондина, нужно сравнить его двигатель с конструкцией стандартного двигателя постоянного тока и так называемого бесколлекторного двигателя. Но для начала приведем некоторые данные из патентов Шкондина, а также ряд рисунков, которые позволят понять основные принципы, которые положил Шкондин в основу своего мотора.
Познакомиться с патентами Шкондина можно по указанным адресам, но можно почитать и на моем сайте по адресам здесь и здесь. Сам Шкондин старается позиционировать свой двигатель как мотор-колесо, но при желании этому двигателю можно придать любую форму, сохраняя при этом саму идеологию изобретения. Рассмотрим поближе мотор-колесо Шкондина

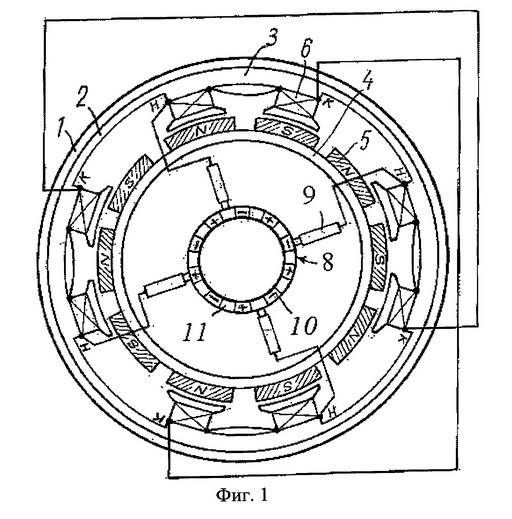
Итак, имеем статор внутри, и ротор снаружи. На статоре через равные промежутки установлено 11 пар магнитов, полюса магнитов чередуются. Всего полюсов 22. На роторе установлены 6 U-образных электромагнитов, у которых, получается, имеется 12 полюсов. На роторе установлены щетки, с помощью которых подается питание на электромагниты, а на статоре установлен коллектор, с которого электрический ток поступает на щетки. Обращаю внимание на то, что расстояние между полюсами любого электромагнита ротора равно расстоянию между соседними магнитами на статоре. А это означает, что в момент точного «соприкосновения» полюсов одного из электромагнитов с соседними полюсами магнитов на статоре, полюса остальных электромагнитов с полюсами магнитов на статоре не «соприкасаются».
Сдвиг полюсов электромагнитов на роторе и полюсов магнитов на статоре относительно друг друга создает между ними градиент напряженности магнитного поля, а последний как раз и является источником крутящего момента. Для варианта двигателя Шкондина, изображенного на рис.1 получается, что в каждый момент времени крутящий момент создают 5 электромагнитов из 6. Тот электромагнит, полюса которого точно «соприкасаются» с полюсами магнитов на статоре, крутящего момента не создаёт. Получаем своеобразный силовой КПД в 83%. И это при отсутствии притиво ЭДС. А если считать КПД по доле участвующих в создании тяги магнитов на статоре, то получаем, что из 22 магнитов тягу создают 20 магнитов, т.е., 91%.
Пока прошу поверить на слово, что коллектор мотора Шкондина устроен так, что он в нужное время переключает направление тока в обмотках электромагнитов, что обеспечивает тягу только в одну сторону. Можно даже утверждать, что в данном моторе Шкондина работают сразу 6 классических электромоторов. Мотор действительно работает мотором, а не маховиком. В данном моторе на «полную катушку» используется не только мощность электромагнитного поля, но и коллекторно-щеточный механизм. И при этом двигатель устроен удивительно просто. Он состоит всего из 5-6 основных деталей. Создав для этих деталей точные матрицы, можно штамповать двигатели Шкондина миллионами.
Познакомимся поближе с одним из патентов Шкондина. Это ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ . Выделим из этого патента достаточно большую цитату, которая содержит основные отличительные признаки двигателя Шкондина:
«Импульсно-инерционный электродвигатель, в соответствии с настоящим изобретением, содержит: статор с круговым магнитопроводом, на котором закреплено четное количество постоянных магнитов с одинаковым шагом;
ротор, отделенный от статора воздушным промежутком и несущий четное число электромагнитов, которые расположены попарно напротив друг друга;
распределительный коллектор, закрепленный на корпусе статора и имеющий расположенные по окружности токопроводящие пластины, соединенные с чередованием полярности с постоянным источником тока и разделенные диэлектрическими промежутками;
токосъемники, установленные с возможностью контакта с пластинами коллектора, причем каждый из токосъемников подключен к одноименному выводу обмоток соответствующих электромагнитов.
Каждый из электромагнитов имеет по две катушки с последовательно встречным направлением обмотки, причем обмотки катушек смежных электромагнитов соединены последовательно, а выводы обмоток противоположных электромагнитов, не подключенные к токосъемникам, соединены между собой. Количество постоянных магнитов статора, равное n и количество электромагнитов ротора равное m, подбирают таким образом, чтобы они удовлетворяли соотношениям:
n=10+4k, где k — целое число, принимающее значения 0, 1, 2, 3 и т.д.
m=4+2L, где L — любое целое число, удовлетворяющее условию 0<=L<=k.
Наиболее часто используемые соотношения количества постоянных магнитов и электромагнитов следующие: n=10, m=4; n=14, m=6; n=18, m=4; n=22, m=4, 6, 8, 10; n=26, m=4, 6, 8, 10, 12 и т.д.
Такое соотношение числа электромагнитов и постоянных магнитов, их взаиморасположение и используемая схема коммутации электромагнитов обеспечивает резонанс токов текущих через обмотки диаметрально противоположных электромагнитов,
и как следствие, уменьшает скачки напряжения (электропотребление) при трогании и разгоне электродвигателя и улучшает его динамические характеристики. Кроме того, такая конструкция электродвигателя позволяет максимально эффективно рекуперировать электроэнергию за счет возникновения противоЭДС при холостом ходе.
Практически ликвидировать искрение на токосъемниках можно путем выбора подходящего угла опережения между токосъемниками и токопроводящими пластинами коллектора. Поэтому обычно токосъемники устанавливают на электродвигателе с возможностью регулировки их положения относительно коллектора. Угол опережения лежит в диапазоне от 0 до 8°.
Общее число витков в обмотках катушек противоположных электромагнитов может быть различно. При этом резонансные явления усиливаются, если разница в количестве витков составляет величину 1/2p от общего числа витков в одной из катушек, где р=2, 3, 4, 5 и т.д.
Настоящее изобретение может быть использовано как для электродвигателя однонаправленного вращения, так и для реверсивного электродвигателя, в зависимости от способа подключения электропитания. В первом случае положительные токопроводящие пластины распределительного коллектора соединяют с положительным полюсом источника постоянного тока, а отрицательные токопроводящие пластины распределительного коллектора при этом замкнуты на корпус электродвигателя.
В реверсивном электродвигателе положительные токопроводящие пластины распределительного коллектора соединяют с положительным полюсом источника постоянного тока, а отрицательные токопроводящие пластины распределительного коллектора соединяют с отрицательным полюсом источника постоянного тока и изолируют от корпуса электродвигателя. Для изменения направления вращения электродвигателя меняют подключение полюсов источника постоянного тока на противоположное.
Конструктивно электродвигатель может быть выполнен так, что ротор будет расположен с внешней стороны статора или ротор будет расположен внутри статора.»
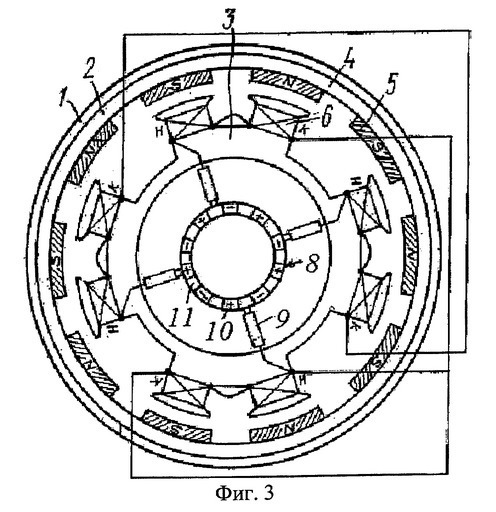
Приведем рисунки из этого патента, которые позволят нам лучше понять принцип работы мотора Шкондина.
Рассмотрим последний рисунок. На нём полюса электромагнитов ротора сверху и снизу совпадают с полюсами магнитов на статоре. Эти электромагниты в создании тяги не участвуют, поэтому питание на них не подается. Полюса электромагнитов справа и слева с полюсами магнитов на статоре не совпадают. Поэтому на эти электромагниты питание подается. И именно эти электромагниты создают крутящий момент. И именно на это тратится энергия из аккумулятора.
Обратите внимание, что как правый, так и левый электромагниты сразу взаимодействует с магнитными полями трех соседних статорных магнитов. А это уже типичная магнитная дорожка, которая за счет градиентов в магнитных полях позволяет получить максимальную тягу. Если считать тягу по задействованным электромагнитам, то получаем, что тягу создают 50% электромагнитов, а если по числу задействованных магнитов статора, то получаем, что в создании тяги участвует сразу 60% магнитов. А это уже большой показатель. Т.е., и на примере этой схеме мы убедились, что мотор-колесо Шкондина – это мотор в моторе.
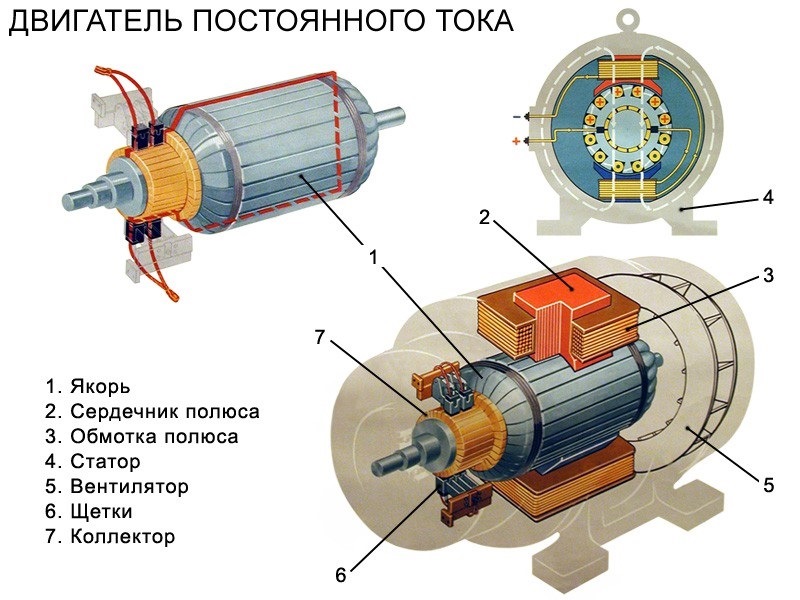
Теперь рассмотрим схему стандартного электродвигателя с подмагничиванием статорных обмоток, взято здесь
В этом двигателе всего пара щеток, зато на коллекторе масса контактов, численно равных числу проводников обмотки ротора. В правом верхнем углу показано сечение мотора с неправильным указанием направления токов в проводниках роторной обмотки. Дело в том, что в каждый момент времени ток подается только в пару проводников, значит только в одном проводнике сверху ток течет от нас, а внизу только в одном проводнике ток течет к нам. Остальные секции ротора такого мотора работают как маховик, что не всегда хорошо. Поэтому при запуске за счет необходимости «сдвинуть ротор с места» такие моторы потребляют большой ток из сети или аккумулятора. Либо при выключении такие моторы превращаются в генераторы, так как остановка ротора, обладающего большой механической инерцией, требует длительного промежутка времени.
К сожалению, такие моторы составляют большую часть моторов на постоянном токе в нашей промышленности. И замена электромагнитов статора на сильные постоянные магниты погоды не сделают.
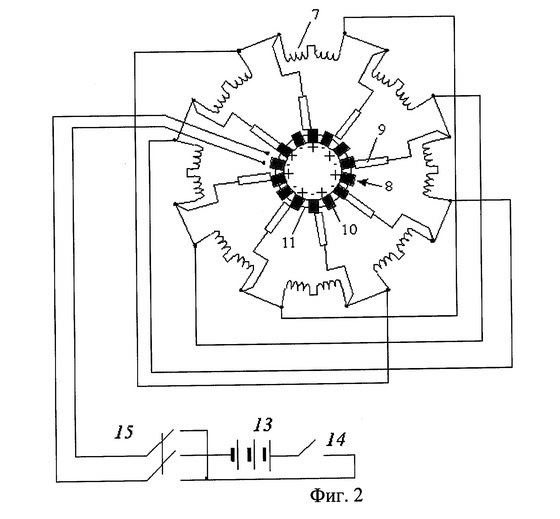
Теперь посмотрим на возможность использования двигателя Шкондина в бесколлекторном варианте. Сам Шкондин получил несколько патентов, где как вариант он рассматривал возможность использования его двигателя без коллектора. Например, на следующем рисунке (рис. 6) показана такая
В этом случае двигатель Шкондина работает примерно так, как показано на следующей анимации:
vitanar.narod.ru/schkondin3/schkondin3_7.gif
Но есть существенный различия. Если в двигателе на рис.7 магнитное поле вращается синхронно с вращением ротора, заставляя ротор вращаться вслед за вращением магнитного поля, то в двигателе Шкондина такого нет. В двигателе Шкондина «бегущим» является отключение тока электромагнита ротора в тот момент, когда полюса электромагнита ротора устанавливаются напротив полюсов пары магнитов на статоре. При этом в момент отключения тока в таком электромагните в других электромагнитах направление тока меняется на противоположное. Это позволяет в нужный момент или нужном месте заменить «притяжение» полюсов электромагнитов к паре магнитов на статоре на «выталкивание» полюсов электромагнитов от пары полюсов магнитов статора.
Поэтому Шкондин правильно делает своим оппонентам замечание, что подходить к его двигателю с общераспространёнными теориями бесполезно, что обмотки электромагнитов ротора нельзя соединять ни звездой, ни треугольником. Оно и, правда, двигатель Шкондина – это совокупность магнитных дорожек, динамически меняющих свои параметры за счет переключение обмоток электромагнитов в нужное время и в нужном месте. Поэтому и выдает этот мотор результаты, которые обычным моторам и не снились.
Мотор Шкондина – это не маховик, это устройство, которое с высоким КПД использует взаимодействие магнитных полей, параметры которых умело меняются как за счет правильного соотношения между парным числом магнитных полюсов на статоре и числом пар полюсов электромагнитов на роторе, число пар магнитов на статоре больше числа пар полюсов электромагнитов на роторе, правильно сконструированного коллектора или устройства синхронизации в бесколлекторном варианте.
Мотор Шкондина обладает при той же массе и подаваемого на обмотки ротора тока гораздо большей мощностью, чем электромотор стандартной конструкции. Мотору Шкондина конструктивно можно придать любую форму, как в виде колеса (блина), так и в виде цилиндра, наподобие той формы, которую придают существующим двигателям постоянного тока. Это делает такие двигатели подходящими для установки в военную технику самого разного назначения. Эти двигатели можно использовать в космосе. В авиации такие двигатели хорошо подходят для вертолетов, так как они обладают малой инерцией вращения. Значит лопастями с такими двигателя легче управлять, уменьшится вероятность непредвиденных катастроф.
Кроме мотора Шкондин спроектировал и собрал несколько вариантов генераторов по своей схеме. Причем на одно и тоже транспортное средство можно установить и двигатель, и генератор. И когда двигатель будет «тянуть» транспортное средство, генератор будет вырабатывать электроэнергию и с КПД больше 90% и возвращать её в аккумулятор. Наивысшим достижением Шкондина является создание спарки двигателя и генератора, которые дополненные небольшой солнечной батареей или ветряком, практически становится «вечным» двигателем, мощность которого достаточна для обеспечения электроэнергией сельского дома или квартиры.
Так что для меня понятно, почему коляска для инвалидов, собранная Шкондиным, пробегает дистанцию на одном заряде аккумулятора больше, чем аналоги, собранные в других странах. Или почему на электровелосипеде Шкондина можно проехать 50 и более километров на паре аккумуляторов для источников бесперебойного питания, которые мы привыкли использовать для своих компьютеров. Или почему мотор-колесо Шкондина можно использовать для строительства ветрогенератора.
Данная статья написана не как реклама Шкондину, а как попытка разобраться с механизмом работы его двигателя, чтобы немного развеять тот туман, который в последнее время сгустился над этим изобретением. И, похоже, что двигатель Шкондина, как всё гениальное, очень простое устройство.
Можно еще долго вести разговор о достоинствах мотора Шкондина. Но пока к этому делу не проявят интерес государственные чиновники или акулы российского бизнеса, мотор-колесо Шкондина так и останется игрушкой для небольшой группы энтузиастов. В Интернете однажды «вышел» на небольшую статью, что электромобили на зимней Олимпиаде в Сочи созданы на основе моторов Шкондина. У меня есть надежда и уверенность, что к мотору Шкондина проявит интерес Министерство обороны Российской Федерации. И тогда мы, возможно, станем обладателями электровелосипедов или электромобилей, в которых будут установлены двигатели Шкондина. И не только в колесах, но и в системах
Мотор-колесо Дуюнова Мотор-колесо – это электродвигатель, встраиваемый в колесо велосипеда, автомобиля, скутера, мотоцикла и других транспортных средств. Двигатель выполнен на оси, что дает привод колесу без вспомогательных элементов передачи тяги, таких как шестерни или цепь. На данный момент все модели мотор-колес, представленные на рынке, являются BLDC-двигателями и имеют в своей конструкции постоянные магниты, из-за использования которых в производстве, стоимость выпуска мотор-колес высока. Мотор-колесо Дуюнова – одна из самых знаменитых разработок на основе технологии «Славянка». Это первое в мире асинхронное мотор-колесо без использования в конструкции постоянных магнитов, за счет чего обеспечивается снижение на 30% веса и материалоёмкости в сравнении с двигателем со стандартными обмотками, полное импортозамещение и независимость от китайских производителей магнитов. Асинхронное мотор-колесо Дуюнова демонстрирует неоспоримые преимущества над мотор-колесами с постоянными магнитами (BLDC): имеет низкие затраты в обслуживании, хороший накат, экономию электроэнергии до 40%, низкий уровень шума, высокую надежность и длительный срок службы.
Сколько магнитов в мотор колесе Kugoo M5?
Какое давление в шинах должно быть у Электросамоката Kugoo M5?
Нормальное давление в шинах — 2.0 Атм.
Сколько времени заряжается Kugoo M5?
Электросамокат Kugoo M5 оснащён удобным сиденьем, что делает поездки на дальние расстояния ещё более комфортными. Моторное колесо мощность 1000 W с хорошим крутящим моментом способно развивать скорость до 55 км/ч. Аккумулятор обеспечивает запас хода до 60 км на одном заряде. Время полной зарядки АКБ составляет 7 часов.
Сколько стоит Kugoo M5?
Электросамокат KUGOO M5. 72 900 руб. Нажми «Купить по акции» и получи 2 подарка + бесплатную доставку по МСК!
Как правильно заряжать Куго м 5?
ОБЩИЕ ПРАВИЛАВставьте штекер в блок аккумулятора;Подключите зарядку к розетке в 220В;После завершения процесса зарядки, вытащите штекер из сети;Отключите штекер от аккумуляторной батареи. Во время зарядки индикатор на аккумуляторе может гореть или мигать красным цветом, а после завершения процесса – зеленым.Apr 14, 2020
Какое давление должно быть в шинах Электросамоката Kugoo?
Сколько атмосфер качать в Электросамоката?
Масса водителя – определяющее значение при выборе давления в колесах. Так, при весе в 70-80 кг рекомендуется накачивать покрышки до уровня 3,5 бар. Если водитель весит меньше, то этого значения много, если масса больше, то нужно компенсировать повышенную деформацию резины увеличенным давлением.
Сколько магнитов в мотор колесе Kugoo M5? Ответы пользователей
Тридцать магнитов в колесе , более расширенные ответы на свои вопросы вы получите на сайте Electro.club. Статья посвещена модели Kugoo M5.
Kugoo M5 sport. . Герметизация мотор—колеса, новая подсветка деки. . И расскажу на сколько крепкий самокат, опробовал его в дтп с шкодой .
163503 Электросамокат KUGOO M5 Jilong 1000W (48V/21Ah) . Вес самоката: 31.5 кг. . Максимальная нагрузка: до 160 кг. . Самовывоз: бесплатно. * Поделиться: .
Мотор колесо Kugoo M5 1000w 48v магниты 5см: объявление о продаже в Москве на Авито. Полностью рабочее колесо. Продается вместе с тормозным диском.
Kugoo m5 хороший выбор для тех кому нравиться езда по бездорожью. . P06: диаметр колес;; P07: количество магнитов в мотор—колесе; .
как минимум 1.5кВт мотор. Он мощнее любых аналогов за такую цену. Дальность хода у 18 mAh для веса 85кг в ЭКО режиме составляет порядка 48 км, что без сомнений, .
Всё об электросамокате фирмы Jilong — Kugoo M5. . Загерметизируйте деку, покройте поверхность магнитов мотор—колеса 1-2 слоями лака для печатных плат, .
Kugoo M4 Pro 2020 — Электросамокаты Kugoo M и G серии и аналоги — Форум . контроллер от Kugoo m5 со стандартным мотор колесом на 500 вт.
Обновленная модификация Kugoo M5: Мотор—колесо с шириной магнитов 6 см. Контроллер 30A выдающий до 1440W мощности. Характеристики: Все характеристики.