Запуск бездатчикового бесколекторного двигателя (Sensorless BLDC)
В предыдущей статье «Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC)» мы рассмотрели алгоритм коммутаций для бесколлекторного бездатчикового двигателя постоянного тока при вращающемся роторе. Сегодня рассмотрим простой способ запуска бесколлекторного бездатчикового двигателя.
Итак, когда ротор не вращается, мы не можем определить его положение. Мы помним, что в бездатчиковом двигателе положение ротора определяется исходя из ЭДС, наводимой в свободной обмотке во время вращения двигателя. Эта ЭДС возникает при перемещении магнитов ротора относительно обмоток статора. Поскольку вращения нет, нет наводимой ЭДС, узнать положение ротора этим методом не представляется возможным.
Самый простой способ — это установить ротор в заведомо известное положение, подав напряжение на две из обмоток двигателя. Выждать паузу, пока ротор займет положение, после чего начать коммутировать согласно таблице, приведенной в предыдущей статье. В зарубежной литературе такой метод называют «Align». Этот метод применяется на большинстве мало инерционных, слаботочных двигателях. Рассмотрим его подробнее.
Первый этап
Первый этап — это установка ротора в начальное положение. Установим ротор в положение P1. Согласно таблице открываем ключи SW1, SW5. Однако, если просто открыть ключи, ток будет быстро расти и достигнет тока короткого замыкания к моменту когда ротор займет свое положение. Такой шок может вывести со строя обмотку двигателя или ключи регулятора, но скорее всего, сработает защита по току. Для того, чтобы этого не произошло, на SW1, SW5 следует подавать ШИМ сигнал. Скважностью ШИМ сигнала устанавливают уровень безопасного напряжения. Чем меньше напряжение, тем мягче и медленнее происходит позиционирование ротора. Чем выше напряжение, тем быстрее и с большими вибрациями происходит позиционирование. Слишком малое напряжение же может вовсе не провернуть ротор. А слишком большое — вызвать нежелательные колебания ротора и увеличить время позиционирования.
Время установки ротора в начальное положение зависит не только от напряжения, приложенного к обмоткам статора, но и от инертности двигателя и нагрузки на валу. Чем больше масса ротора и приводимого им устройства на валу, тем медленнее он будет устанавливаться в начальное положение. Важно правильно определить время, которое нужно выждать между подачей напряжения на обмотки и окончанием позиционирования ротора. Если вы продолжите запуск двигателя до того, как ротор установился в начальное положение, старт может оказаться неуспешным. Если позже — обмотки будут греться под воздействием тока. В большинстве случаев скважность ШИМ и время установки ротора в начальное положение определяют экспериментально. В особо ответственных случаях для этого используют специальные приборы, которые помогают анализировать колебательные вращения ротора при установке его в начальное положение и последующем старте.
Если изобразить временную диаграмму установки ротора в начальное положение, она будет иметь форму затухающих колебаний. Важно понимать, что ротор может находиться в одном их 6 положений и для того чтобы занять исходное положение ему придется провернуться на разный угол, соответственно это может занять разное время.
Второй этап
Теперь, когда положение ротора известно, мы можем переключить ключи в состояние P2, ротор начнет вращаться к следующему положению. Казалось бы, задача сводится к ранее решенной в предыдущей статье. Но, скорость вращения ротора еще слишком мала чтобы по наводимой в статоре ЭДС можно было определить положение ротора. Поэтому, первые несколько переключений выполняют асинхронно. Т.е. не определяя положения ротора. Количество асинхронных переключений зависит от инертности двигателя. Чем более массивный, а значит: инертный ротор, — тем длительнее разгон и необходимо будет выполнить большее число асинхронных переключений. При этом период между переключениями с каждым разом сокращают. Таким образом, разгоняя ротор двигателя. Разумеется, что разгон двигателя зависит от того, насколько чётко Вы угадаете момент следующего переключения. Ведь если переключение произойдет намного раньше или намного позже, ротор будет тормозиться.
Третий этап
В момент последнего асинхронного переключения переходим в режим управления двигателем, считая, что он вращается, а положение ротора соответствует текущему состоянию ключей. Т.е. пытаемся определить его положение, используя метод, описанный в предыдущей статье. Однако, не всегда получается запустить двигатель с первого раза. В алгоритме управления следует предусмотреть контроль вращения ротора двигателя. Если старт не удался, следует вовремя отключить питание. В противном случае при остановленном двигателе и открытых ключах могут выйти со строя, как двигатель, так и регулятор. Один из способов контроля вращения ротора — измерение времени прошедшего от момента предыдущего переключения ключей. Если прошло слишком много времени, а положение ротора не изменилось, значит, двигатель заклинило. Это позволит отключить двигатель при заклинивании или неудачном старте еще до момента достижения критического значения тока.
В случае неудачного старта попытку повторяют.
Такой способ старта будет однозначно сопровождаться колебаниями ротора. В момент старта возможно проворачивание ротора в противоположную сторону от необходимого направления. Частично устранить недостатки такого способа запуска бездатчикового бесколлекторного двигателя может определение положения ротора в остановленном состоянии. Один из методов определения положения ротора в остановленном состоянии будет рассмотрен в следующей статье.
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.

Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.

Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).

Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.

Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.

Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).

Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.

Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.

Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).

Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:

Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.

а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
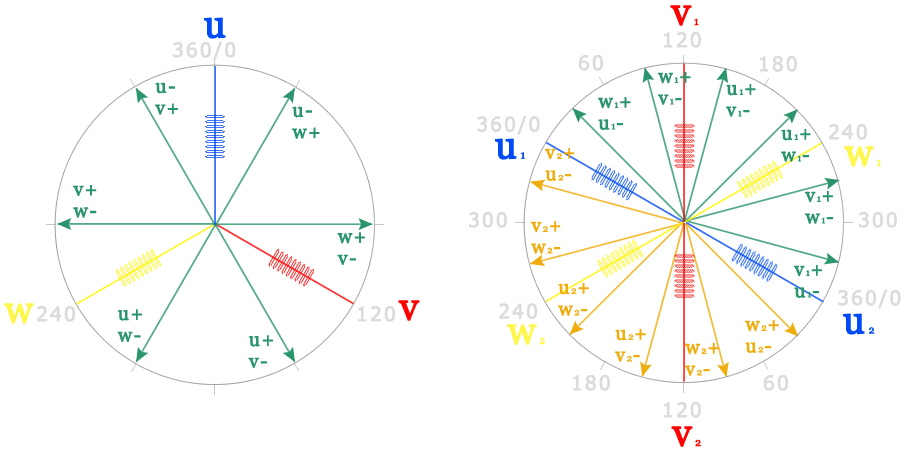
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.

Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
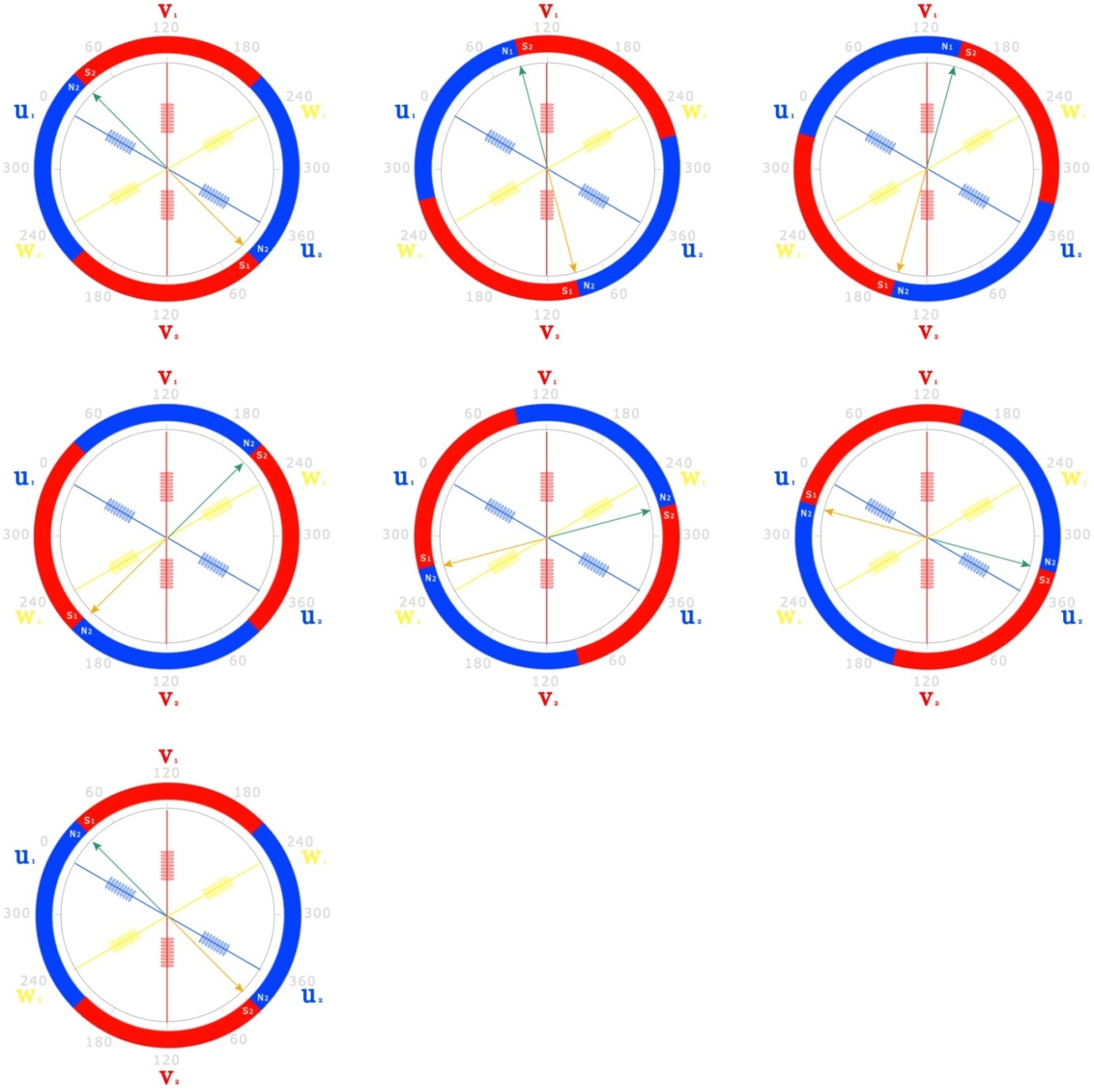
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.

Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).

Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).

Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).

Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.

Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.

Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).

Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.

Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой

Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:

Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.

После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.

Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.

Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Подключение бесколлекторного электродвигателя постоянного тока (BLDC) к Arduino
В настоящее время наблюдается небывалый интерес к конструированию различных летающих механизмов – дронов, планеров, глайдеров, вертолетов и т.д. Сейчас их можно легко сконструировать самостоятельно благодаря большому количеству материалов по ним в сети интернет. Все эти летающие механизмы используют для своего движения так называемые бесщёточные (бесколлекторные) электродвигатели постоянного тока (BLDC — Brushless DC Motor). Что представляют собой подобные двигатели? Почему именно они сейчас используются в различных летающих дронах? Как правильно купить подобный двигатель и подключить его к микроконтроллеру? Что такое ESC и почему мы будем его использовать? Ответы на все эти вопросы вы найдете в данной статье.

В этой статье мы рассмотрим управление скоростью вращения бессенсорного бесколлекторного электродвигателя постоянного тока A2212/13T (Sensorless BLDC outrunner motor), часто используемого для конструирования дронов, с помощью ESC (Electronic Speed Controller – электронный контроллер скорости) и платы Arduino.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- A2212/13T BLDC Motor (бесколлекторный электродвигатель постоянного тока).
- ESC (20A) (электронный контроллер скорости) (купить на AliExpress).
- Источник питания (12V 20A).
- Потенциометр 10 кОм (купить на AliExpress).
Принцип действия BLDC двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller). В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке. Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной. OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.

Примечание : существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор. Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах. Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС. Этот метод используется в двигателе, рассматриваемом в нашей статье, и именно он чаще всего применяется в дронах и других летающих устройствах.
Почему дроны и вертолеты используют именно BLDC двигатели?
Сейчас существует множество различных типов дронов – с двумя лопастями, с четырьмя лопастями и т.д. Но все они используют именно BLDC двигатели. Почему именно их, ведь BLDC двигатели стоят дороже чем обычные электродвигатели постоянного тока?

Существует несколько причин для этого:
- большой крутящий момент, который очень важен для того чтобы оторвать летающее средство от земли;
- эти двигатели доступны в формате OutRunner, что позволяет обойтись без сцепления в конструкции дрона;
- маленький уровень вибраций во время работы, что очень важно для неподвижного зависания дрона в воздухе;
- хорошее соотношение мощности к весу двигателя. Это очень важно для использования на летающих механизмах чтобы все элементы его конструкции имели как можно меньший вес. Обычный двигатель постоянного тока, обеспечивающий такой же крутящий момент как и BLDC двигатель, будет как минимум в два раза тяжелее него.
Зачем нужен контроллер ESC
Как мы уже знаем, для функционирования BLDC двигателей необходим какой-нибудь контроллер, который преобразует напряжение постоянного тока от батарейки в последовательность импульсов, подаваемую в определенном порядке на провода (фазы) двигателя. Этот контроллер называется ESC (Electronic Speed Controller – электронный контроллер скорости). Основной обязанностью данного контроллера является правильная подача питания на провода BLDC двигателя чтобы двигатель вращался в нужном направлении. Это осуществляется с помощью считывания обратной ЭДС (back EMF) с каждого провода и подачи питания на катушку в то время когда магнит пересекает ее. Внутри себя контроллер ESC содержит достаточно много разнообразной электроники и при желании вы можете подробно изучить его устройство по соответствующим материалам в сети интернет. Здесь же мы кратко рассмотрим рассмотрим только основные компоненты его конструкции.

Управление скоростью вращения на основе ШИМ (широтно-импульсной модуляции, в англ. PWM) . Контроллер ESC может управлять скоростью вращения BLDC двигателя при помощи считывания сигнала ШИМ подаваемого на его оранжевый провод. Принцип управления им очень похож на управление сервомоторами. Сигнал ШИМ, подаваемый на контроллер ESC, должен иметь период 20ms, а коэффициент заполнения этого ШИМ сигнала будет определять скорость вращения BLDC двигателя. Поскольку точно такой же принцип используется для управления углом поворотом сервомотора, то для управления BLDC двигателем мы можем использовать библиотеку для управления сервомоторами. Если вы не сталкивались с этим принципом ранее, то вы можете прочитать статью о подключении сервомотора к плате Arduino.
Battery Eliminator Circuit (BEC) – цепь, исключающая батарею . Почти все контроллеры ESC поставляются с этой схемой. Как следует из ее названия, данная схема устраняет потребность в использовании отдельной батареи для питания микроконтроллера, то есть в данном случае нам не понадобится отдельный источник питания для платы Arduino – контроллер ESC сам обеспечит плату Arduino регулируемым напряжением питания +5V. В различных контроллерах ESC используются различные схемы регулировки данного напряжения, но в большинстве случаев распространена схема с линейной регулировкой.
Встроенное ПО . Каждый контроллер ESC содержит в своем ПЗУ встроенную прикладную программу, написанную производителем контроллера. Эта программа во многом определяет логику функционирования контроллера. Наиболее популярными встроенными программами для контролеров ESC являются Traditional, Simon-K и BL-Heli. Эта программа может изменяться пользователем, однако мы в этой статье не будем рассматривать данный вопрос.
Некоторые термины, используемые в тематике BLDC и ESC
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен. Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Low Voltage Stop (остановка при низком напряжении питания) . Обычно BLDC двигатели калибруют так, чтобы при одинаковом уровне управляющего воздействия скорость его вращения была постоянной. Однако этого трудно достигнуть потому что со временем напряжение питающей батареи уменьшается. Чтобы предотвратить это обычно контроллеры ESC программируют таким образом чтобы они останавливали работу BLDC двигателя когда напряжение питающей батареи опускается ниже определенной границы. Особенно эта функция полезна при использовании BLDC двигателей в дронах.
Response time (время отклика, время реакции, время ответа) . Означает способность двигателя быстро изменять скорость вращения при изменении управляющего воздействия. Чем меньше время реакции, тем лучше контроль над двигателем.
Advance (движение вперед) . Эта проблема является своеобразной «ахиллесовой пятой» для BLDC двигателей. Все BLDC двигатели имеют хотя бы небольшой подобный баг. Эта проблема вызвана тем, что когда катушка статора запитана ротор движется вперед поскольку на нем есть постоянный магнит. И когда управляющее напряжение с этой катушки снимают (чтобы подать его на следующую катушку) ротор продвигается вперед немного дальше чем предусмотрено логикой функционирования двигателя. Это нежелательное продвижение двигателя вперед в англоязычной литературе называют “Advance” и оно может приводить к нежелательным вибрациям, нагреву и шуму при работе двигателя. Поэтому хорошие контроллеры ESC стараются по возможности устранить этот эффект в работе BLDC двигателей.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
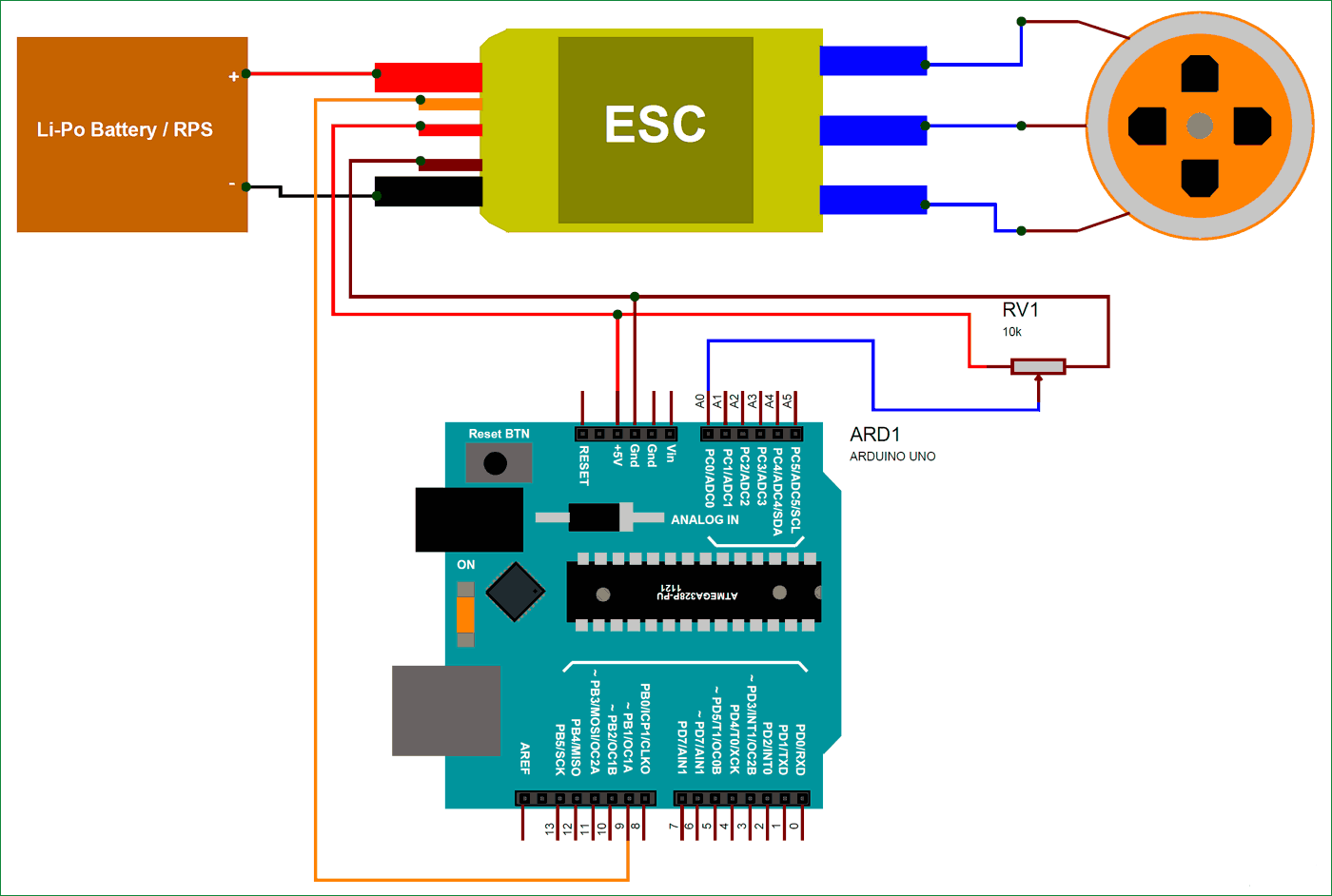
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение : у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение +5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя. Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом
. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Бесколлекторный двигатель
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Достоинства и недостатки
Для сравнения используются следующие условия: приборы подключены к бытовой электрической сети с напряжением 220 вольт и частотой 50 Гц, мощность двигателей при этом одинакова. Разность в механических характеристиках устройств может быть недостатком или достоинством в зависимости от того, какие предъявляются требования к приводу.
Итак, коллекторный электродвигатель переменного тока: достоинства в сравнении с агрегатом постоянного тока:
— Включение в сеть производится напрямую, при этом нет необходимости в использовании дополнительных компонентов. В случае с агрегатом постоянного тока требуется выпрямление.
— Пусковой ток гораздо меньше, что весьма важно для устройств, используемых в быту. — При наличии управляющей схемы ее устройство гораздо проще – реостат и тиристор. Если электронный компонент выйдет их строя, то коллекторный электродвигатель, цена которого зависит от мощности и составляет от 1400 рублей и более, останется работоспособным, но будет сразу же включаться на полную мощность
Если электронный компонент выйдет их строя, то коллекторный электродвигатель, цена которого зависит от мощности и составляет от 1400 рублей и более, останется работоспособным, но будет сразу же включаться на полную мощность
— При наличии управляющей схемы ее устройство гораздо проще – реостат и тиристор. Если электронный компонент выйдет их строя, то коллекторный электродвигатель, цена которого зависит от мощности и составляет от 1400 рублей и более, останется работоспособным, но будет сразу же включаться на полную мощность.
Имеются и определенные недостатки:
— За счет потерь на перемагничивание статора и индуктивность общий КПД заметно снижается.
— Максимальный момент тоже уменьшен.
Электродвигатели однофазные коллекторные обладают определенными достоинствами в сравнении с асинхронными:
— отсутствие привязки к сетевой частоте и быстроходность;
— значительный пусковой момент;
— пропорциональное снижение и увеличение оборотов в автоматическом режиме, а также увеличение момента при возрастании нагрузки, при этом напряжение питания остается неизменным;
— регулирование оборотов может быть плавным в довольно широком диапазоне посредством изменения питающего напряжения.
Звезда и Треугольник

При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.










Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
Максимальная величина штатного напряжения для продолжительной работы.
Сопротивление внутренних цепей контроллера.
Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне)
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество
Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.

Коммутацию следует производить таким образом, чтобы Ф0 (поток возбуждения ротора) поддерживался относительно потока якоря постоянным. При взаимодействии такого возбуждения и потока якоря формируется вращающий момент М, стремящийся развернуть ротор и параллельно обеспечить совпадение возбуждения и потока якоря. Однако во время поворота ротора происходит переключение различных обмоток под воздействием датчика положения ротора, в результате чего поток якоря разворачивается по направлению к следующему шагу.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Принцип работы коллекторного двигателя
Коллекторный двигатель переменного тока 220 Вольт и мотор постоянного тока, преобразуют электрическую энергию в физическую силу. Создание физической силы осуществляется путём раскручивания якоря, установленного на двух подшипниках в корпусе мотора.
Ротор и статор силового агрегата имеют обмотки. Они изготовлены из провода. Во избежание замыкание витков обмотки между собой провод выполнен в изолирующей оболочке. Напряжение подается на обмотку статора при помощи провода.
Якорь коллекторного мотора подвижный. Для передачи напряжения на обмотку якоря используется коллектор.

Он выполнен в виде медных контактов. На них передаётся напряжение через графитовые щетки. Такая конструкция позволяет передавать напряжение на обмотку якоря независимо от скорости его вращения.
При прохождении электрического тока через обмотки возникает магнитное поле. Обмотка якоря имеет магнитное поле противоположной полярности полю обмотки статора. Под воздействием электромагнитных полей разной полярности якорь двигателя начинает вращаться.
ВНИМАНИЕ: Коллекторный двигатель может быть использован в качестве генератора постоянного тока
Недостатки бесколлекторных двигателей постоянного тока
Очень высокая сложность управления
Бесколлекторные двигатели постоянного тока для правильной работы требуют специализированных контроллеров и сложных алгоритмов управления.
Высокая цена
Стоимость самих двигателей не слишком высока, но когда добавляется стоимость контроллера, общая стоимость использования бесколлекторного двигателя постоянного тока в проекте становится относительно высокой.
Необходимость специализированных передач
В таких приложениях, как вакуумные пылесосы Dyson, бесколлекторные двигатели постоянного тока должны быть снабжены передачей для преобразования высоких скоростей до нужной скорости.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.









Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Коллекторный двигатель
Коллекторные двигатели бывают трехфазные и однофазные. Однофазные двигатели применяются в электрической тяге и для приводов малых и средних мощностей.
| Габаритные размеры двигателя типа ДР-25. |
Коллекторные двигатели изготовляются в защищенном исполнении во избежание случайных прикосновений к вращающимся и токоведущим частям и попадания внутрь машины посторонних предметов и капель воды, падающих отвесно.
Коллекторные двигатели могут быть постоянного, переменного тока и универсальными, способными работать как от сетей постоянного, так и от сетей переменного тока. Коллекторные двигатели-постоянного тока выпускаются либо с параллельным ( независимым) возбуждением, либо с последовательным возбуждением, либо с постоянными магнитами.
Коллекторные двигатели с последовательным возбуждением имеют небольшой сдвиг фаз между током в якоре и магнитным потоком индуктора и применяются для включения в сеть переменного тока.
Коллекторные двигатели могут быть построены как для однофазного, так и для трехфазного тока и раз — деляются по роду своих характеристик на две основные группы: 1) двигатели последовательные, которые резко изменяют свою скорость с изменением нагрузки и дают высокую скорость при малых значениях тормозного момента на валу, развивая в то же время большой начальный вращающий момент при относительно малом потреблении тока; 2) двигатели шунтовые, скорость которых меняется при изменении нагрузки весьма мало благодаря тому, что магнитный поток их, определяясь током ответвленной возбуждающей цепи, меняется при нагрузке незначительно. Скорость этих двигателей может быть изменяема вверх или — вниз от синхронной в широких пределах. Нек-рые — из них допускают вполне плавное изменение-скорости, другие-лишь ступенями.
| Векторная диаграмма однофазного коллекторного двигателя.| Коллекторный двигатель с компенсационной обмоткой и добавочными полюсами.| Репульсионный двигатель о v / о.| Связь направления вращения репульсионного двигателя с положением щеток.| Репульсионный двигатель с двойным комплектом щеток. |
Мощные коллекторные двигатели мощностью до 1500 кВт применяются в качестве тяговых в ряде западноевропейских стран.
Коллекторные двигатели компрессоров и вентиляторов имеют последовательное возбуждение, а преобразователи и делители напряжения, которые могут работать без нагрузки, обычно выполняют со смешанным возбуждением. Обмотки параллельного или независимого возбуждения этих машин создают магнитный поток, достаточный для ограничения их частоты вращения в допустимых пределах при работе без нагрузки. Генераторы преобразователей постоянного тока обычно имеют смешанное возбуждение. Большую магнитодвижущую силу у них создает обмотка независимого возбуждения. Генераторы служебного тока выполняют с параллельным регулируемым возбуждением.
| Компенсированный коллекторный двигатель с питанием со стороны ротора.| Однофазный коллекторный двигатель последовательного возбуждения.| Электромагнитный момент в коллекторных двигателях. |
Однофазные последовательные коллекторные двигатели ( рис. 6.9) имеют сосредоточенную обмотку возбуждения 0В, расположенную на явновыраженных полюсах и соединенную последовательно с многофазной обмоткой якоря Я, секции которой присоединены к коллектору. Для снижения потерь в стали статор и ротор выполняются шихтованными. Конструкция однофазных коллекторных двигателей сходна с конструкцией двигателей постоянного тока последовательного возбуждения.
| Габаритные размеры двигателей типов МУН-1, МУН-2 и МУН-1 С, МУН-2С. |
Коллекторные двигатели серии МУН предназначены для привода различных механизмов промышленного применения.
Коллекторный двигатель однофазного тока частотой 5Q гц состоит из статора, якоря, щеточного устройства и подшипниковых щитов.
Коллекторные двигатели малой мощности выпускаются в массовых количествах, поэтому для изолировки пазов и обмотки якорей разработано много типов полуавтоматических станков. Таким образом ручные обмотки механизированы в большей степени, чем катушечные обмотки машин средней мощности. Поэтому название обмоток скорее определяет порядок укладки проводов в пазы, чем технологию выполнения.
Конструкция и принцип действия
Безколлекторный инструмент занял в наборе необходимых инструментов свое место. Покупая оборудование в дом, хозяин должен ознакомиться с принципами его работы.
Можно рассмотреть особенности того, как работает безщеточный двигатель в шуруповерте:
- Ток здесь переключается в обмотках статора. На якоре нет катушки, и магнитное поле создается с помощью установленных внутри корпуса магнитов.
- Время, когда нужно подключить электричество регулируется при помощи встроенных датчиков. Используется эффект Холла. Короткие электрические импульсы и сигналы скорости, регулирующие работу, переходят во встроенный процессор. Это действие принято называть ШИМ сигналом.
- Поочередно образуемые импульсы направляются на усилители, которые усиливают ток. Инверторы (усилители), соединены с обмоткой на статоре. Данные элементы накапливают ток, вырабатываемый катушками, и при помощи импульсов передают его из внутреннего процессора.
В результате возникает магнитное поле, которое заставляет вращаться якорь и инструмент начинает работать.

Инструмент безщеточный
Коллекторный двигатель
Коллекторный двигатель – это двигатель, оснащенный щетками, или же щеточно-коллекторным узлом, который и отвечает за приведение в движение данного механизма. Иными словами, коллектор – это совокупность нескольких контактов. Коллекторный двигатель достаточно прост в управлении, а источником питания для него может быть как батарея, так и аккумулятор.

Преимущества коллекторного двигателя заключаются в следующих качествах:
- он имеет сравнительно небольшой вес и компактный размер;
- его стоимость значительно ниже стоимости бесколлекторного двигателя;
- коллекторный двигатель пригоден к ремонту.

Но наряду с преимуществами, данный вид двигателя имеет и недостатки:
- коэффициент полезного действия коллекторного двигателя не превышает 50-60%;
- слишком быстрый износ двигателя за счет высокой скорости трения его щеток.
Скорость работы коллекторного двигателя одновременно является и преимуществом данного типа механизма, и его недостатком. С одной стороны, она позволяет проводить работу на высоких оборотах, но с другой – становится причиной перегрева мотора и дальнейшего выхода его из строя.










Возможные поломки и способы их ремонта
В результате работы коллекторного двигателя могут возникнуть неисправности. Большинство из них самостоятельно сможет устранить человек не имеющий специализированных технических знаний и оборудования. Ниже представлены наиболее часто возникающие неисправности.
Повышенный шум при работе узла. Сильный уровень шума при работе мотора может свидетельствовать о выходе из строя подшипников, на которые установлен якорь.

При выходе из строя подшипников качения необходимо заменить изношенные детали новыми.
Износ щёток. Критическая изношенность щёток сопровождается повышенным уровнем шума при работе. Несвоевременная замена может привести к поломке коллектора. При возникновении неисправности необходимо заменить графитовые щётки
При выборе щёток необходимо обратить внимание на их толщину. Новые детали не должны застревать в держателях
Отсутствие вращения якоря при подключении мотора к сети питания. Отсутствие вращения может возникнуть в результате обрыва цепи питания. Обрыв может произойти в результате поломки пружины прижимающей щётку к коллектору или при обрыве провода. При поломке пружины необходимо заменить ее новой деталью. При обрыве провода необходимо восстановить его целостность.
Отсутствие вращения ротора может возникнуть в результате выхода из строя предохранителя. Для восстановления работоспособности необходимо установить новый предохранитель. Перед установкой предохранителя необходимо определить причину, по которой старое устройство вышло из строя. После устранения причины можно установить предохранитель и провести испытание двигателя.
Отсутствие регулировки вращения вала якоря. После запуска агрегат работает на максимальных оборотах. Такая неисправность возникает в результате поломки реостата. Для восстановления работоспособности двигателя необходимо заменить регулятор.
Медленное вращение ротора. Снижение частоты вращения вала может возникнуть в результате низкого напряжения в сети питания. Необходимо проверить напряжение. Снижение оборотов якоря может быть спровоцировано высокой нагрузкой. Необходимо снизить нагрузку на якорь.
Из вышеперечисленного следует, что коллекторный мотор преобразовывает электрическую энергию в физическую силу. Для передачи напряжения к обмоткам якоря используются щётки. Моторы отличаются простотой конструкции и небольшими габаритно массовыми параметрами.
Устройство ДПТ
Основными частями электрической машины постоянного тока являются магниты и обмотка. К вспомогательным частям относятся корпус, сердечник, вал, коллектор, щёточный механизм. Все эти детали имеют своё назначение.
Сердечники подвижной и неподвижной частей изготавливаются не из целостной конструкции, а из листов электротехнической стали. Эта особенность строения даёт возможность практически устранить вихревые токи.
Прямой обязанностью коллектора является преобразование переменного тока, который вырабатывается в обмотке якоря, в постоянный. Коллектор — узел, характерный именно для машин постоянного тока. Но он одновременно и самый уязвимый, так как почти половина всех электромоторов выходит из строя в процессе работы именно по причине его поломки. Отсутствие коллектора в строении асинхронной или синхронной машины улучшает её надёжность. Это преимущество сохраняется как для трехфазных, так и для однофазных машин переменного тока.
Управление двигателем постоянного тока подразумевает изменение скорости его вращения, ведь основной его задачей является приведение в ход рабочих механизмов. Скорость вращения можно изменять тремя методами:
- изменением напряжения, которое подводится;
- изменением сопротивления в цепи якоря;
- изменением магнитного потока в цепи возбуждения.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.











Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.
Форум по обсуждению материала БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Переделываем игрушку обычный трактор в радиоуправляемый — фотографии процесса и получившийся результат.
В каком направлении течет ток — от плюса к минусу или наоборот? Занимательная теория сути электричества.
Что такое OLED, MiniLED и MicroLED телевизоры — краткий обзор и сравнение технологий.
Что такое изолятор и чем он отличается от токопроводящего материала. Занимательная теория радиоэлектроники.
Общее устройство (Inrunner, Outrunner)

Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Бесщеточный мотор преимущества и недостатки
Бесщеточный мотор гарантирует более длительный срок службы, поскольку на самом деле нет щетки, чтобы его изнашивать. Они могут работать более 1000 часов. Безщеточные моторы более энергоэффективны, чем щеточные.
Однако они изначально стоят дороже, чем щеточные моторы. Вам также необходимо коммутировать устройства, такие как кодировщики и контроллеры.
Щеточный двигатель сильно шумит, тогда как их бесщеточные аналоги менее шумные. Бесщеточный двигатель также предлагает более высокое отношение крутящего момента к весу. Что еще? Нет необходимости иметь дело с ионизирующими искрами от коммутатора и электромагнитными помехами.
Бесколлекторный двигатель
Бесколлекторный двигатель, в отличие от коллекторного типа, не имеет щеточно-коллекторного узла. Вместо него в нем располагается ротор с магнитами и статор. Такой конструктив двигателя также обладает своими преимуществами и недостатками. Преимущества бесколлекторого двигателя заключаются в следующих качествах:
- довольно высокий коэффициент полезного действия (порядка 90%);
- конструктив данного типа двигателя защищает его от внешних воздействий окружающей среды (пыли, грязи и влаги);
- бесколлекторный двигатель имеет повышенную скорость работы, но наряду с этим гораздо более устойчив к износу, чем коллекторный тип двигателя.
В свою очередь недостатки бесколлекторого двигателя прямо противоположны преимуществам коллекторного двигателя, а именно такой тип двигателя требует существенных финансовых затрат, а также он довольно сложен в ремонте.

Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.










К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.