Пуск асинхронного двигателя с фазным ротором с помощью пускового реостата.
Применяется для двигателей 1 с фазным ротором (рис. 265, а). Пусковой реостат 2 обычно имеет четыре — шесть ступеней, что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление Rп, поддерживая высокое значение пускового момента на все время, разгона двигателя. При пуске предварительно устанавливают пусковой реостат в положение, при котором он имеет максимальное
По мере увеличения частоты вращения ротора вращающий момент двигателя, как видно из его механической характеристики, уменьшается и может стать меньше некоторого момента Mпmin. Поэтому при уменьшении вращающего момента до Mпmin часть сопротивления пускового реостата выводят. При этом вращающий момент двигателя возрастает до Mпmax, а затем с увеличением частоты вращения будет изменяться по характеристике 3, полученной при сопротивлении пускового реостата Rп3 < Rп4. При дальнейшем уменьшении вращающего момента до Mпmin часть сопротивления реостата снова выключается, и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп2 < Rп3.
Таким образом, в процессе пуска двигателя сопротивление пускового реостата постепенно (ступенями) уменьшают и вращающий момент двигателя изменяется в пределах от Mпmax до Mпmin по ломаной кривой, показанной на рис. 265, б жирной линией. В конце пуска пусковой реостат полностью выводят, обмотка ротора двигателя замыкается накоротко и двигатель переходит на работу по естественной характеристике 1. Отдельные ступени пускового реостата в процессе разгона двигателя могут выключаться вручную или автоматически. Таким образом, путем включения реостата в цепь обмотки ротора можно осуществить пуск двигателя при Mп ?Mпmax и резко уменьшить пусковой ток.
Мягкий» пуск асинхронного двигателя с помощью тиристорного регулятора напряжения.
При подаче сигнала «Пуск» система управления автоматически изменяет угол управления тиристорами силовых блоков, за счет чего ток двигателя плавно нарастает до значения, необходимого для трогания двигателя и связанного с ним механизма. Это значение пускового тока стабилизируется, и двигатель разгоняется с фиксированным значением пускового тока. В зависимости от скорости для большинства механизмов этот ток составляет (1,5…4) Iном. Для механизмов с «вентиляторной» нагрузкой пусковой ток может иметь линейно-нарастающую зависимость от времени пуска.
При увеличении скорости двигателя до значения близкого к номинальному двигатель выходит на свою рабочую характеристику, и пусковой ток уменьшается до величины, определяемой фактической нагрузкой двигателя. Система управления при этом полностью открывает тиристоры силовых блоков, и на двигатель подается полное напряжение питающей сети.
После окончания отсчета времени или по спаду тока устройство выдает команду «Окончание разгона», разрешающую включение рабочего выключателя, который перехватывает ток нагрузки на себя. Получив команду «Контроль шунтирования», устройство снимает импульсы управления с тиристоров, запирая тиристоры силовых блоков, а также разрывает их цепи управления. Далее выдается команда «Окончание пуска», и происходит отключение пусковой и головной ячеек. Процесс пуска заканчивается. Повторный запуск возможен при повторной подаче команды «Пуск».
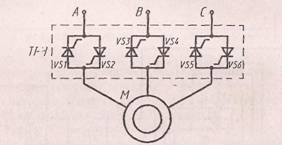 Рис. 2.19 Схема пуска трехфазного асинхронного электродвигателя с помощью тиристорного регулятора напряжения (ТРН).
Рис. 2.19 Схема пуска трехфазного асинхронного электродвигателя с помощью тиристорного регулятора напряжения (ТРН).
Схема включения двигателя с помощью тиристорного регулятора напряжения представлена на рис. 2.19.
В регуляторе напряжения в каждый фазный провод включаются встречно-параллельно два тиристора, один из которых работает условно в положительный полупериод напряжения сети, а другой в отрицательный.
Применение Устройства Плавного Пуска также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности
(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
Регулирование напряжения на выходе регулятора осуществляется изменением времени включения каждого тиристора относительно момента, когда ток должен переходить с одного из трех тиристоров на другой (базовая точка), путем подачи на тиристор управляющего импульса, что дает возможность изменять время протекания тока через тиристор в течение полупериода напряжения сети и напряжение на его выходе, подаваемое на нагрузку, в
Данном случае на двигатель. Это напряжение не является синусоидальным, и его можно представить, как среднее напряжение, которое можно менять, изменяя продолжительность работы тиристора в течение полупериода. Время включения тиристора относительно базовой точки выражается в градусах и называется углом регулирования. Изменяя угол регулирования тиристоров, можно получить необходимое напряжение для плавного пуска двигателя.
77. Отключение асинхронного двигателя от сети.
Трехфазные электродвигатели при случайном отключении одной из фаз быстро перегреваются и выходят из строя, если их вовремя не отключить от сети. Поэтому были разработаны различные системы автоматических защитных отключающих устройств, однако они либо сложны, либо недостаточно чувствительны.
Это самый распространенный способ, проверенный временем. Защита двигателя от отключения одной фазы обеспечивается применением теплового реле ТЗ. Смысл этой защиты состоит в том, что постоянная нагревания теплового реле подбирается таким же образом, что и постоянная нагревания электродвигателя. То есть, проще говоря, реле нагревается так же, как и двигатель. И при превышении температуры выше допустимой реле отключает двигатель. При отключении одной фазы ток через другие фазы резко возрастает, двигатель и тепловое реле начинают быстро нагреваться, что вызывает срабатывание теплового реле. Способ хорош и тем, что обеспечивает и защиту двигателя от перегрузки и пробоя одной фазы на корпус. Но для надежной защиты от пробоя на корпус двигатель обязательно должен быть заземлен или занулен. Недостаток этого способа в том, что его нужно достаточно точно подбирать и настраивать. В идеале его номинальный ток должен быть такой же, как и у двигателя.

Второй способ защиты трехфазных асинхронных электродвигателей.
В обычную систему запуска трехфазного двигателя введено дополнительное реле Р с нормально разомкнутыми контактами Р1. При наличии напряжения в трехфазной сети обмотка дополнительного реле Р постоянно находится под напряжением и контакты Р1 замкнуты. При нажатии кнопки "Пуск" через обмотку электромагнита магнитного пускателя МП проходит ток, и системой контактов МП1 электродвигатель подключается к трехфазной сети. При случайном отключении от сети провода А реле Р будет обесточено, контакты Р1 разомкнутся, отключив от сети обмотку магнитного пускателя, который системой контактов МП1 отключит двигатель от сети. При отключении от сети проводов В и С обесточивается непосредственно обмотка магнитного пускателя. В качестве дополнительного реле Р используется реле переменного тока типа МКУ-48.

Третий способ защиты трехфазных асинхронных электродвигателей.
Защитное устройство основано на принципе создания искусственной нулевой точки (точка 1′), образованной тремя одинаковыми конденсаторами С1-С3. Между этой точкой и нулевым проводом 0′ включено дополнительное реле Р с нормально замкнутыми контактами. При нормальной работе электродвигателя напряжение в точке 0′ равно нулю, и ток через обмотку реле не протекает. При отключении одного из линейных проводов сети нарушается электрическая симметрия трехфазной системы, в точке 0′ появляется напряжение, реле Р срабатывает и контактами Р1 обесточивает обмотку магнитного пускателя — двигатель отключается. Это устройство обеспечивает более высокую надежность по сравнению с предыдущим. Реле типа МКУ — на рабочее напряжение 36 В. Конденсаторы С1-С3 — бумажные, емкостью 4-10 мкф, на рабочее напряжение не ниже удвоенного фазного. Чувствительность устройства настолько высока, что иногда двигатель может отключиться в результате нарушения электрической симметрии, вызванного подключением посторонних однофазных потребителей, питающихся от этой сети. Чувствительность можно понизить, применив конденсаторы меньшей емкости.

Четвертый способ защиты трехфазных асинхронных электродвигателей.
Схема защитного устройства аналогична схеме, рассмотренной во втором способе. При нажатии кнопки "Пуск" включается реле Р, контактами Р1 замыкая цепь питания катушки магнитного пускателя МП. Магнитный пускатель срабатывает и контактами МП1 включает электродвигатель. При обрыве линейных проводов В или С отключается реле Р, при обрыве провода А или С — магнитный пускатель МП. В обоих случаях электродвигатель выключается контактами магнитного пускателя МП1. По сравнению со схемой защитного устройства трехфазного двигателя, рассмотренной в первом способе, это устройство имеет преимущество: дополнительное реле Р при выключенном двигателе обесточено.
78. Конструкция и принцип действия синхронных машин (СМ).
а) Общие сведения
Синхронные электрические машины характерны тем, что у них ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора, подобного статору асинхронной машины. Это достигается тем, что ротор синхронной машины представляет собой обычно электромагнит или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную угловую скорость последнего независимо от момента на валу. Это свойство синхронных машин позволяет использовать их в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев, например в металлургии, их использование становится необходимым. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт.
Основной областью применения синхронных машин является использование их в качестве промышленных генераторов для выработки электрической энергии на электростанциях.
б) Устройство синхронной машины
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины рис. 14.1). Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри массивного корпуса. В пазах с внутренней стороны статора размещена обмотка переменного тока, в большинстве случаев трехфазная.
Ротор синхронной машины представляет собой электромагнит — явнополюсный (рис. 15.1, где / — полюсы, 2— полюсные катушки, 3 — сердечник ротора, 4 — контактные кольца) или неявнополюсный (рис. 15.2, где / — сердечник ротора, 2 — пазы с обмоткой, 3 — контактные кольца). Ток в обмотку ротора поступает через контактные кольца и щетки от внешнего источника постоянного тока — возбудителя.
У многополюсной синхронной машины ротор имеет р пар полюсов, а токи в обмотке статора образуют тоже р пар полюсов вращающегося магнитного поля (как у асинхронной машины). Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения равна:
П ри стандартной промышленной частоте 50 Гц максимальная частота вращения, соответствующая двухполюсной(р = 1) машине, будет 3000 об/мин. Это частота вращения современного турбоагрегата,состоящего из первичного двигателя — паровой турбины и неявнополюсного синхронного генератора (турбогенератора).
У гидроагрегата гидравлическая турбина вращается относительно медленно. Это вынуждает изготовлять гидрогенераторы многополюсными с явными полюсами и в большинстве случаев — вертикальным валом. Частота вращения этих генераторов — от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Вследствие относительно малых частот вращения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности — свыше 8 кг/ (кВ-А), чем генераторы к паровым турбинам— менее 2,5 кг/(кВ-А).
в) Режимы работы синхронной машины
Любая синхронная машина, включенная в электрическую систему, может’ работать в режиме генератора и двигателя. Режим работы синхронной машины определяется взаимодействием магнитных полей, создаваемых токами в обмотках статора и ротора. Рассмотрим режимы работы двухполюсной машины. Наложение магнитных полей токов в фазных обмотках статора возбуждает в синхронной машине, так же как и в асинхронной, магнитное поле (см. § 14.3), вращающееся с угловой скоростью со. Приближенное распределение магнитных линий вращающегося магнитного поля в магнитопроводе синхронной машины в режимах генератора (а) и двигателя (б) показано на рис. 15.3 штриховой линией. Распределение линий вращающегося магнитного поля показывает, что приближенно его можно представить в виде вращающейся с угловой скоростью <о пары полюсов, расположенных на статоре.
А налогичным образом магнитное поле, создаваемое током в обмотке вращающегося ротора, также можно приближенно представить в виде вращающейся пары полюсов, расположенных на роторе.
Если пренебречь всеми видами потерь энергии в синхронной машине, то при отсутствии момента на валу ось полюсов ротора будет совпадать с осью полюсов статора.
Для того чтобы заставить синхронную машину, включенную в систему, работать в режиме генератора, отдавая в эту систему энергию, необходимо увеличить механический момент, приложенный первичным двигателем к валу машины. Тогда под действием возросшего вращающего момента ось магнитных полюсов ротора повернется на некоторый угол у относительно оси полюсов статора в направлении вращения (рис. 15.3, а). Так как при этом результирующее магнитное поле, создаваемое наложением магнитных полей токов в обмотках ротора и статора, изменится, то ток в обмотках статора также изменится. Взаимодействие этого тока с магнитным полем ротора создает тормозной момент, действующий на ротор. Это и означает преобразование механической мощности первичного двигателя в электрическую мощность генератора, включенного в систему. Магнитные полюсы ротора будут как бы тянуть за собой магнитные полюсы статора.
Если теперь приложить к валу машины вместо вращающего тормозной момент механической нагрузки, то ось полюсов ротора повернется на некоторый угол относительно оси полюсов статора против направления вращения (рис. 15.3,6). Вновь возникнут токи в обмотках статора и создадут электромагнитные силы взаимодействия токов статора и магнитного поля ротора, но на этот раз эти силы будут стремиться увлечь ротор в направлении вращения. Электромагнитные силы создадут теперь вращающий момент, при посредстве которого электрическая энергия сети преобразуется в механическую на валу машины; таким путем синхронная машина переходит? в режим двигателя.
Режим работы синхронной машины изменяется от генераторного на двигательный и обратно в зависимости от механического воздействия на вал машины, причем электромагнитные силы играют роль своеобразной упругой связи между ротором и статором.
Дата добавления: 2018-06-01 ; просмотров: 4627 ; Мы поможем в написании вашей работы!
Лекции Эл.привод / Lecture_10
При управлении напряжением изменяются действующие значения фазных напряжений обмотки статора. Согласно формуле (9.7) электромагнитный момент пропорционален квадрату напряжения. Семейство механических характеристик показано на рис. 10.1. Достоинством этого метода является простота схемы управления. К недостаткам относится то, что характеристики расположены неравномерно из-за квадратичной зависимости. Далее, при малом напряжении жесткость механической характеристики мала. Наконец, диапазон регулирования скорости вращения узкий – от номинальной до критической скорости.

Рис. 10.1. Механические характеристики асинхронного
двигателя при управлении напряжением.
Реостатное управление возможно у двигателей с фазным ротором. Трехфазная обмотка ротора такого двигателя выполняется медным изолированным проводом и подключена к трем контактным кольцам, установленным на валу. К этим кольцам прижаты три комплекта щеток, соединенных с трехфазным пусковым или регулировочным реостатом.
Из формулы для электромагнитного момента (9.7) следует, что момент М зависит от отношения r2‘/s, а при наличии реостата в цепи ротора – от отношения (r2‘ + rр‘)/s. Например, если суммарное активное сопротивление в фазе ротора и скольжение увеличить в два раза, то электромагнитный момент не изменится. При увеличении скольжения s возрастает частота скольжения ω2 = sω1, а скорость вращения ω = ω1 – ω2 уменьшается.
Семейство механических характеристик при реостатном управлении показано на рис. 10.2. Видно, что все характеристики имеют одинаковый критический момент, а при увеличении сопротивления реостата характеристика смещается в сторону меньшей скорости.
Достоинством реостатного управления является снижение тока при малых скоростях вращения ротора и увеличение пускового момента. Это явление можно объяснить по формуле (9.1). При увеличении сопротивления реостата rр величина тока I2 уменьшается, а его активная составляющая I2 cos φ2 возрастает.
Вторым достоинством является широкий диапазон регулирования скорости вращения (от номинальной до нуля).

Рис. 10.2. Механические характеристики асинхронного
двигателя при реостатном управлении
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.
Реостат в цепи фазного ротора асинхронного двигателя используется для уменьшения пускового тока и для увеличения пускового момента.

Рис. 10.3. Пуск асинхронного двигателя с помощью реостата
На рис. 10.3 показаны три механические характеристики. Характеристика с участком d—e—f является естественной, сопротивление пускового реостата здесь равно нулю. Механическая характеристика с участком b—c—d – искусственная с сопротивлением реостата rр‘. Механическая характеристика с участком a—b – искусственная с сопротивлением реостата rр» > rр‘. Видно, что пусковой момент на этой характеристике равен критическому моменту Мк.
Рассмотрим последовательность действий для разгона двигателя до номинальной скорости за минимальное время. На обмотку статора подается номинальное напряжение питания при сопротивлении реостата rр». В начальный момент пуска двигатель развивает максимальный момент Mк. Происходит разгон двигателя от точки a до точки b.
Теперь пусковой реостат переключается с сопротивления rр» на сопротивление rр‘. Ток ротора I2 быстро нарастает, но косинус угла сдвига по фазе cos φ2 уменьшается. В результате рабочая точка остается на месте.
Далее происходит разгон двигателя от точки b через точку с до точки d. Теперь пусковой реостат переключается с сопротивления rр‘ на нулевое сопротивление. Далее происходит разгон двигателя по естественной характеристике из точки d через точку e в точку f. Это номинальный режим работы.
Частотно-токовое управление асинхронным двигателем
с помощью зависимого инвертора частоты
Номинальная скорость вращения трехфазного асинхронного двигателя близка к синхронной скорости, а номинальное скольжение составляет 3-5 %. Это связано с тем, что электромагнитный момент создается активной составляющей тока ротора, которая уменьшается при увеличении скольжения из-за увеличения индуктивного сопротивления обмотки ротора. Если скорость вращения нужно менять в широких пределах, то целесообразно изменять частоту питания согласно формуле
 (10.1)
(10.1)
где  оптимальная частота скольжения, а ω – скорость вращения ротора.
оптимальная частота скольжения, а ω – скорость вращения ротора.
Электромагнитный момент определяется формулой

где в числителе имеется квадрат напряжения фазы U1, а в знаменателе в квадратных скобках – квадрат продольного сопротивления схемы замещения фазы асинхронного двигателя. Частное от деления указанных величин дает квадрат тока фазы статора, т.е. справедливы соотношения

 (10.2)
(10.2)
Формулы (10.1), (10.2) показывают, что при изменении скорости вращения ротора надо менять частоту питания, а при изменении требуемого электромагнитного момента – ток фазы статора. Этим и объясняется термин »частотно-токовое управление».
На рис. 10.4 показана функциональная схема асинхронного электропривода с частотно-токовым управлением. Электропривод имеет двухфазный асинхронный двигатель АД, датчик частоты вращения (тахогенератор) ДЧВ, задатчик частоты скольжения ЗЧС, идентификатор знака момента ИЗМ, устройство извлечения корня УИК, сумматор С, перемножители П1 – П3, интегратор И, функциональный преобразователь ФП, два усилителя тока УТ1, УТ2, объект управления ОУ.
Ротор двигателя механически связан с объектом управления ОУ и с ротором датчика частоты вращения ДЧВ, который вырабатывает сигнал, пропорци-

Рис. 10.4. Функциональная схема электропривода
с двухфазным асинхронным двигателем
ональный частоте вращения ротора ω. На выходе задатчика частоты скольжения ЗЧС формируется сигнал, пропорциональный модулю оптимальной частоты скольжения  . Он приходит на первый вход перемножителя П3.
. Он приходит на первый вход перемножителя П3.
Входной сигнал электропривода, пропорциональный требуемому электромагнитному моменту М о , приходит на вход идентификатора знака момента ИЗМ, формирующий сигнал знака момента, равный 1 или –1. Этот сигнал перемножается на перемножителе П3 с модулем оптимальной частоты скольжения |ω2|, и на выходе получается частота скольжения ω2. Она суммируется на сумматоре С с частотой вращения ротора ω, поступающей от датчика частоты вращения ДЧВ. На выходе сумматора С получается частота вращения магнитного поля ω1.
Если требуемый электромагнитный момент М о положительный, то магнитное поле должно вращаться быстрее, чем ротор, и ω2 > 0. Если же момент М о отрицательный, то магнитное поле должно вращаться медленнее ротора, или должно вращаться относительно ротора в отрицательном направлении, т.е. должно выполняться неравенство ω2 < 0. Этим объясняется необходимость определения знака момента.
Интегратор И выдает сигнал, пропорциональный углу α1 поворота магнитного потока Ф. Этот сигнал приходит на вход функционального преобразователя ФП, формирующего сигналы cos 1 и sin 1. Они поступают на входы перемножителей П1 и П2. На выходе устройства извлечения корня УИК формируется сигнал, пропорциональный амплитуде системы токов статора:

Этот сигнал приходит на вторые входы перемножителей П1, П2, на выходах которых формируются требуемые значения токов обмотки статора:


Эти значения приходят на входы усилителей тока УТ1 и УТ2. Они представляют собой усилители напряжения, охваченные глубокой отрицательной обратной связью по току нагрузки с помощью датчиков тока. Эти усилители питают фазы обмотки статора асинхронного двигателя токами, близкими к требуемым значениям:


Асинхронный двигатель развивает требуемый момент
M ≈ M o
при рациональном токе и частоте скольжения, что обеспечивает высокий КПД и энергосбережение в широком диапазоне изменения частоты вращения и электромагнитного момента.
В случае асинхронного двигателя с трехфазной обмоткой на статоре функциональный преобразователь должен формировать три функции:
поступающие на входы трех перемножителей, а фазы обмотки статора питаются от трех усилителей тока.
Вопросы для самопроверки
1. Отметить достоинства и недостатки управления асинхронного двигателя напряжением.
2. Отметить достоинства и недостатки реостатного управления асинхронным двигателем.
3. Почему при введении реостата в цепь ротора ток уменьшается, а электромагнитный момент возрастает?
4. Почему для быстрого разгона переключение пускового реостата производится в точках пересечения механических характеристик?
5. Почему при переключении пускового реостата в точках b, d ток в обмотке ротора возрастает, а момент сохраняется?
6. Объясните необходимость изменения частоты питания при изменении частоты вращения ротора двигателя.
7. Зачем нужно изменять величину токов обмотки статора при изменении требуемого момента ?
8. Почему изменяется знак частоты скольжения при смене знака момента ?
9. Как определяется частота питающих напряжений?
10. Зачем нужен сдвиг по фазе между токами фаз A и B?
11. Нарисуйте функциональную схему асинхронного электропривода с частотно-токовым управлением при трехфазной обмотке двигателя.
С фазным ротором с помощью реостатов в цепи ротора
Для регулирования вращения асинхронного двигателя с фазным ротором (АДФ) применения все рассмотренные способы. Но практически из них находит применение лишь способ изменения скорости с помощью реактора насыщения.
В основном же для регулирования частоты вращения АДФ используются способы, основанные на воздействии на вторичную цепь. Существует два способа:
1) включение в цепь ротора реостата,
2) введение в цепь ротора добавочной ЭДС частоты скольжения.
Рассмотрим первый способ.
Регулирование частоты вращения АДФ можно осуществить по схеме, аналогичной, рассмотренной выше схем пуска (реостатный пуск). Однако в данном случае реостат рассчитывается на длительную работу. Известно, что включение в цепь ротора добавочного сопротивления приводит к смещению Мm в сторону больших скольжений (рис.2.39).
В данном случае при двигатель переходит с одной характеристики на другую, (то есть из точки 1 в точку 2 и т.д.) при этом S увеличивается, а частота уменьшается: .
Определим величину добавочного сопротивления в цепи ротора при :
Способ неэкономичен, так как связан с большими потерями в цепи ротора.
Особые режимы работы и виды асинхронных машин
Асинхронный генератор
Теоретически скольжение АМ в режиме генератора может изменяться в пределах . Для осуществления этого режима работа АМ включается в сеть переменного тока и вращается посторонним двигателем частотой вращения n>n1 в сторону вращения поля.
Перед включением АМ генератором ее следует раскрутить в сторону вращения поля до частоты n ≈ n1. Так как в генераторном режиме , то активная составляющая вторичного тока изменяет свой знак по сравнению с двигательным режимом
следовательно, меняет знак и электромагнитный момент
Момент становится тормозным. Реактивная составляющая вторичного тока не меняет знак
в результате, можно построить векторную диаграмму асинхронного генератора (рис.2.40), имея виду, что .
Из векторной диаграммы следует, что активная составляющая первичного тока , так как , следовательно, P1=m1I1U1 . Таким образом, в отличие от АД, асинхронный генератор не потребляет из сети активную мощность, а отдает ее в сеть, преобразуя механическую мощность с вала в электрическую. Об этом также свидетельствует изменение знака сопротивления , включаемое во вторичную цепь схемы замещения АМ, приведенной к работе трансформатором.
Это сопротивление становится отрицательным, следовательно, изменит знак и мощность, выделяемая в этом сопротивлении , что эквивалентно механической мощности .
Что касается реактивных составляющих первичного тока и первичной мощности, то они не меняют своего знака по сравнению с двигательным режимом
Таким образом, асинхронный генератор (АГ), как и АД, потребляет реактивный ток и реактивную мощность из сети. Следовательно, АГ может работать лишь на сеть, на которую одновременно работают источники, вырабатывающие реактивную мощность (СГ, конденсаторы). Это существенный недостаток АГ и он применяется относительно редко. Этот режим используется как побочный при использовании АД. Изобразим энергетическую диаграмму АГ (рис.2.41).
Режиму АГ соответствует нижняя часть круговой диаграммы.
Рассмотрим работу АГ в автономном режиме (рис. 2.42). В этом случае к зажимам АМ подключается батарея конденсаторов. В этом случае АГ самовозбуждается, причем процесс самовозбуждения аналогичен процессу в генераторе постоянного тока с самовозбуждением (рис. 2.43).
Условия самовозбуждения – наличие остаточного потока ротора. При вращении ротора наводит в обмотке ротора , под действием которой протекает ток , который является одновременно намагничивающим током АГ.
Он вызывает увеличение ЭДС до значения , что вызывает дальнейшее увеличение тока и т.д. Самовозбуждение идет пока >Uc=Icxc и прекращается в точке А, в которой наступает равенство .
2.8.2. Режим противовключения (электромагнитного тормоза)
В этом режиме ротор АМ, подключенный к сети вращается в сторону, противоположную вращению поля, следовательно, частоте вращения ротора n<0, а скольжение . Вращение осуществляется за счет механической энергии внешнего приводного механизма. Теоретически скольжение изменяется в пределах . На практике обычно . В режиме противовключения активная и реактивная составляющие вторичного тока имеют те же знаки, что и в двигательном режиме. В режиме противовключения АМ развивает положительный электромагнитный момент, действующий в направлении поля, однако он является тормозящим, т.к. действует встречно по отношению к вращению ротора.
С другой стороны к ротору приложен внешний вращающий момент и таким образом машина получает механическую мощность с вала. Об этом свидетельствует изменение знака воображаемого сопротивления , включенного во вторичную цепь схемы замещения АМ, приведенной к работе трансформатором. Это сопротивление становится отрицательным. Отрицательной оказывается и выделенная в нем электрическая мощность , что является эквивалентом мощности механической.
Таким образом, АМ в режиме противовключения потребляет мощность с двух сторон: электрическую со стороны сети и механическую со стороны вала, и вся эта мощность расходуется на потери в машине и в основном на покрытие электрических потерь в обмотке ротора. Полезной мощности АМ в этом режиме не развивает. В связи с этим режим электромагнитного тормоза является самым тяжелым в тепловом отношении.
В данном случае электромагнитная мощность, получаемая от сети, переводится на ротор, частично покрывая электрические потери в роторе. Другая часть потерь покрывается за счет механической мощности с вала.
В соответствии с этим изобразим энергетическую (рис. 2.44) и векторную
(рис. 2.45) диаграмму АМ.
В этом режиме сопротивление мало, поэтому вторичный ток и угол значительны. При этом первичный ток и угол также велики. Это подтверждает, что режим противовключения является тяжелым в тепловом отношении.
Режим электромагнитного тормоза применяется для торможения и остановки АД и приводимых им в движение механизмов.
Это осуществляется путем изменения направления вращения поля за счет переключения двух любых питающих проводов (фаз) обмотки статора. Механическая мощность развивается за счет вращения по инерции масс ротора и присоединенного к нему механизма при уменьшении частоты вращения. При n=0 машина отключается от сети. При осуществлении реверса отключение не происходит.
В случае АДФ, в процессе осуществления режима противовключения, в цепь ротора включают добавочные сопротивления (тормозной режим становится устойчивым).
Выбор пусковых реостатов для асинхронных электродвигателей
 Асинхронные электродвигатели с фазовым ротором пускаются посредством реостатов, включаемых в цепь ротора электродвигателя. В качестве пусковых реостатов для указанной цепи используются:
Асинхронные электродвигатели с фазовым ротором пускаются посредством реостатов, включаемых в цепь ротора электродвигателя. В качестве пусковых реостатов для указанной цепи используются:
1. нормальные пусковые реостаты ручного управления,
2. контакторные реостаты, представляющие собой наборы нормализованных ящиков сопротивлений в комплекте с магнитными станциями управления.
Для выбора пусковых реостатов для асинхронных электродвигателей с фазным ротором необходимо знать:
1. мощность, которую должен поглотить реостат при пуске,
2. отношение U2/I2, где U2 — напряжение между кольцами ротора при неподвижном роторе, когда статор включен на номинальное напряжение при номинальной частоте, a I2 — номинальный ток в фазе ротора,
3. частоту пусков в час, принимая, что пуски следуют подряд один за другим через промежутки, равные двойному времени пуска,
4. количество ступеней реостатов.
Мощность, поглощаемая реостатом при пуске, равна:

Напряжение на кольцах и номинальный ток ротора указываются в каталогах на электродвигатели. При отсутствии данных значение тока I2 может быть определено по следующим приближенным формулам:
1. трехфазный ротор
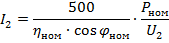
где Рном — номинальная мощность электродвигателя, квт, ηном —номинальный к. п. д. электродвигателя, cosφном — коэффициент мощности (номинальное значение),
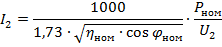
2. двухфазный ротор, ток в двух крайних кольцах:
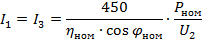
3. то же, но ток в среднем кольце:

Как указывалось выше, пусковые реостаты нормальной конструкции выпускаются для следующих режимов:
пуск с половинной нагрузкой (или вхолостую) — при половинном моменте,
пуск с полной нагрузкой — при полном моменте,
пуск с перегрузкой — при двойном моменте.
Пусковой (пиковый) ток реостата по отношению к номинальному составляет:
В табл. 1 приведены примерные практические данные для подбора пусковых реостатов для асинхронных электродвигателей с фазным ротором. Для приближенного определения необходимых ступеней реостата можно пользоваться табл. 2.
Таблица 1 Определение величины сопротивления реостата
| Отношение U2/I2 | Сопротивление реостата, ом (на фазу) | Допустимый ток, A |
| 0,42-0,75 | 0,734 | 280—140 |
| 0,75—1,3 | 1,11 | 180—87,4 |
| 1,3—2,4 | 2,00 | 136-64 |
| 2,4—4,2 | 2,88 | 100-150 |
| 4,2-7,5 | 4,50 | 76-47 |
Таблица 2 Рекомендуемое число ступеней пусковых сопротивлений
| Мощность, квт | Количество ступеней пусковых сопротивлений на фазу | |||
| при ручном управлении | при контакторном управлении | |||
| полная нагрузка | половинная нагрузка | вентиляторы или центробежные насосы | ||
| 0,75—2,5 | 2 | 1 | 1 | 1 |
| 3,5—7,8 | 2 | 2 | 2 | 2 |
| 10-20 | 2 | 2 | 1 | 2 |
| 22—35 | 3 | 2 | 2 | 2 |
| 35—55 | 3 | 3 | 2 | 3 |
| 60—95 | 4 | 4 | 3 | 3 |
| 100—200 | 4 | 5 | 3 | 4 |
| 220-370 | 4 | 6 | 4 | 5 |
При большой частоте пусков и при необходимости дистанционного управления двигателем обычные реостаты ручного ого управления непригодны. В этом случае используются контакторные реостаты.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!