Шаговые двигатели — конструкция, принцип работы и применение
Шаговый двигатель представляет собой бесщеточное электромеханическое устройство, которое преобразует последовательность электрических импульсов, приложенных к его обмоткам возбуждения, в точно определенное пошаговое механическое вращение. На каждый импульс вал двигателя вращается на фиксированный угол, при получении нескольких импульсов, он поворачивается на определенный угол. Этот угол, на который вал шагового двигателя поворачивается для каждого импульса, называется угловым шагом, который обычно выражается в градусах.
Количество входных импульсов, подаваемых на двигатель, определяет угловой шаг, и, следовательно, положение вала двигателя контролируется путем отправки пакета импульсов. Эта уникальная особенность делает шаговый двигатель хорошо подходящим для системы управления без обратной связи, в которой точное положение вала поддерживается с точным количеством импульсов без использования датчика обратной связи. Чем меньше угловой шаг, тем больше будет число шагов на оборот, и тем выше будет точность получаемого положения. Углы шага могут составлять от 90 градусов до 0,72 градуса, обычно используемые углы шага составляют 1,8 градуса, 2,5 градуса, 7,5 градуса и 15 градусов.
Направление вращения вала зависит от последовательности импульсов, поданных на обмотки статора. Скорость вращения вала двигателя прямо пропорциональна частоте входных импульсов, подаваемых на обмотки возбуждения.
Как и у всех электродвигателей, он имеет статор и ротор.
Ротор это подвижная часть, которая не имеет обмоток, щеток и коммутатора. Обычно роторы выполняются из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Статор часто состоит из многополюсных и многофазных обмоток возбуждения , обычно из трех или четырехфазных, намотанных на необходимое количество полюсов, определяемое желаемым угловым смещением на импульс.
В отличие от других двигателей он работает с запрограммированными дискретными управляющими импульсами, которые подаются на обмотки статора через электронный привод. Вращение происходит за счет магнитного взаимодействия между полюсами последовательно включенной обмотки статора и полюсами ротора.
Типы Шаговых Двигателей
Существует три основных категории шаговых двигателей, а именно:
— реактивный (ротор из магнитомягкого материала) ;
— с постоянными магнитами (ротор из магнитотвёрдого материала);
Во всех этих двигателях в статоре используются обмотки возбуждения. Напряжение постоянного тока подается на катушки обмоток возбуждения, и каждый вывод обмотки подключается к источнику через твердотельный переключатель. В зависимости от типа шагового двигателя,конструкция ротора состоит из ротора из мягкой стали с выступающими полюсами, цилиндрического ротора с постоянным магнитом и постоянного магнита с зубьями из мягкой стали. Рассмотрим эти типы подробнее.
Реактивный шаговый двигатель
Это базовый тип шагового двигателя, который существует уже давно, и он обеспечивает самый простой способ понять принцип работы со структурной точки зрения. Как следует из названия, угловое положение ротора зависит от сопротивления магнитной цепи, образованной между полюсами статора (зубьями) и зубьями ротора.
Конструкция реактивного шагового двигателя
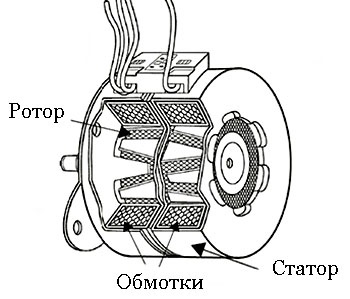
Двигатель состоит из намотанного статора и многозубого ротора из магнитомягкого материала. Статор состоит из стальных пластин, на которые намотаны обмотки. Обычно он наматывается на три фазы, которые распределены между парами полюсов. Количество полюсов сформированного таким образом статора кратно четному числу фаз, для которых намотаны обмотки. На рисунке ниже, статор имеет 12 одинаково расположенных выступающих полюсов, где каждый полюс намотан возбуждающей катушкой. Эти три фазы запитываются от источника постоянного тока.
Ротор имеет выступающие полюса, выполненный полностью из магнитомягкого материала . Выступающие зубцы полюса ротора имеют такую же ширину, что и зубцы статора. Количество полюсов на статоре отличается от числа полюсов ротора, что обеспечивает возможность самостоятельного запуска и двунаправленного вращения двигателя.
Принцип работы реактивного шагового двигателя
Принцип работы шагового двигателя заключается в позиционировании ротора в определ енном положении с зубцами полюса возбуждения в магнитной цепи минимального сопротивления. При подачи сигнала на двигатель и возбуждении определенную обмотку, он создает свое магнитное поле и развивает собственные магнитные полюса. Из-за остаточного магнетизма в полюсах ротора сигнал заставит ротор двигаться в положение с минимальным сопротивлением, и, следовательно, один набор полюсов ротора совмещается с активным набором полюсов статора. В этом положении ось магнитного поля статора совпадает с осью, проходящей через любые два магнитных полюса ротора. Когда ротор совпадает с полюсами статора, он обладает достаточной магнитной силой, чтобы удержать вал от перемещения в следующее положение, либо по часовой стрелке, либо против часовой стрелки.
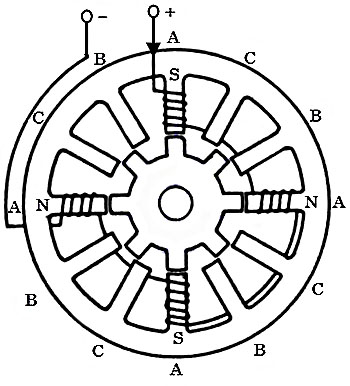
Рассмотрим принципиальную схему 3-фазного, 6 полюсов статора и 4 зубьев ротора, показанного на рисунке ниже. Когда фаза A-A снабжается подаче постоянного тока путем замыкания переключателя S1, обмотка становится магнитом, в результате чего один зуб становится «+», а другой «-«. Таким образом, магнитная ось статора лежит вдоль этих полюсов. Благодаря силе притяжения, катушка статора «+» притягивает ближайший зубец ротора противоположной полярности, то есть «+» и «-» притягивает ближайший зубец ротора противоположной полярности, то есть «+». Затем ротор настраивается в положение минимального сопротивления, где магнитная ось ротора точно совпадает с магнитной осью статора.
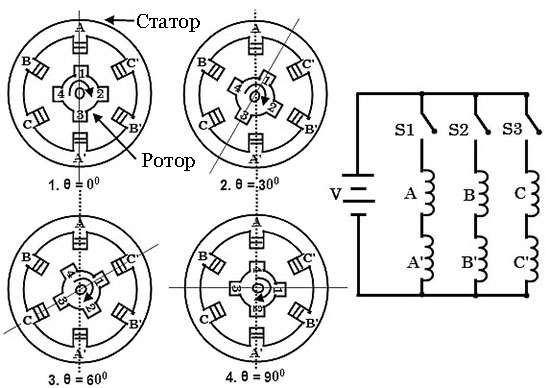
Когда фаза B-B запитывается от замыкания переключателя S2, а фаза A-A остается обесточенной при размыкании выключателя S1, обмотка B-B ‘создает магнитный поток, и, следовательно, магнитная ось статора смещается вдоль полюсов. таким образом, образованный им. Следовательно, ротор с намагниченными зубьями статора перемещается с минимальным сопротивлением и вращается на угол 30 градусов по часовой стрелке.
Когда на выключатель S3 подается напряжение после размыкания выключателя S2, на фазу C-C подается питание, зубья ротора выравниваются в новом положении, перемещаясь на дополнительный угол 30 градусов. Таким образом, ротор движется по часовой стрелке или против часовой стрелки, последовательно возбуждая обмотки статора с определенной последовательностью. Угол шага этого трехфазного 4-полюсного шагового двигателя с зубьями ротора выражается как 360 / (4 х 3) = 30 градусов (как угол шага = 360 / Nr х q).
Угол шага может быть дополнительно уменьшен путем увеличения числа полюсов на статоре и роторе, в таких случаях в двигателях часто наматываются дополнительные обмотки. Это также может быть достигнуто за счет использования различных конструкций шаговых двигателей, таких как многоступенчатое расположение и механизм редуктора.
Шаговый двигатель с постоянными магнитами
Конструкция двигателя с постоянными магнитами является, пожалуй, наиболее распространенной среди нескольких типов шаговых двигателей. Как следует из названия, к конструкции двигателя добавляются постоянные магниты. Основным преимуществом этого мотора является его низкая себестоимость. Этот тип двигателя имеет 48 — 24 шагов на оборот.
Конструкция шагового двигателя с постоянными магнитами
В этом двигателе статор является многополюсным, и его конструкция аналогична реактивному шаговому двигателю, как обсуждалось выше. Он состоит из щелевой периферии, на которую намотаны катушки возбуждения статора, которые могут быть двух-, трех- или четырехфазными. Концевые клеммы всех этих обмоток выведены и подключены к возбуждению постоянного тока через полупроводниковые переключатели в цепи привода.
Ротор состоит из материала с постоянными магнитами, такого как феррит, который может иметь форму цилиндрического или выступающего полюса, но обычно это гладкий цилиндрический. Ротор спроектирован так, чтобы иметь четное количество постоянных магнитных полюсов с чередующимися «+» и «-» полярностями.
Принцип работы шагового двигателя с постоянным магнитом
Этот тип двигателя работает по принципу притяжения полюсов с разным знаком. Когда обмотки статора возбуждаются источником постоянного тока, он создает магнитный поток и устанавливает «+» и «-» полюса. Из-за силы притяжения и отталкивания между полюсами ротора с постоянными магнитами и полюсами статора ротор начинает двигаться в положение соответствующему поданному сигналу на статор.
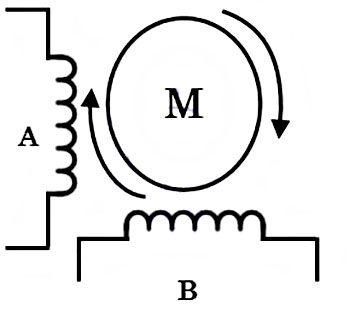
Рассмотрим двухфазный шаговый двигатель с двумя полюсами с постоянным магнитом ротора, как показано на рисунке ниже.
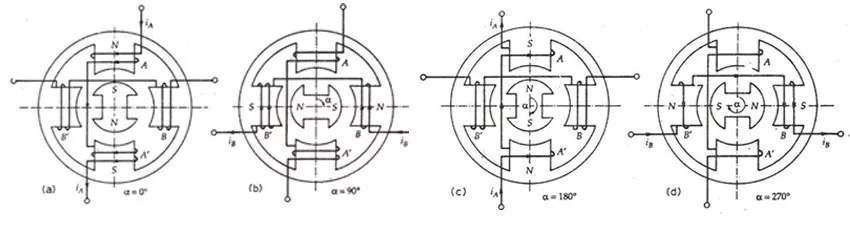
Когда на фазу А подается обратное напряжение по отношению к обмотке А’ устанавливаются «+» и «-» полюса. Благодаря силе притяжения полюса ротора совмещаются с полюсами статора, так что ось магнитного полюса ротора регулируется относительно оси статора, как показано на рисунке.
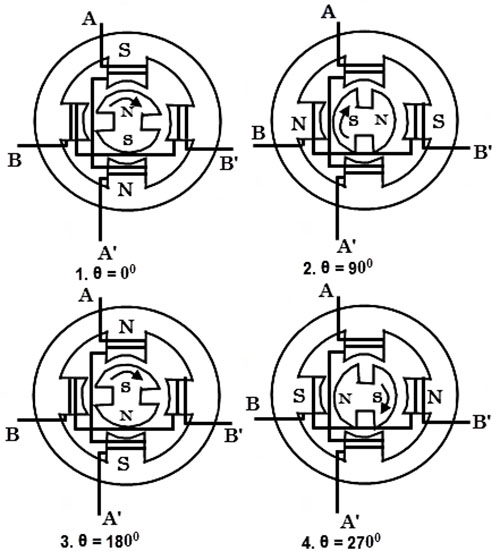
Когда возбуждение переключается на фазу B и выключается фаза A, ротор дополнительно настраивается на магнитную ось фазы B’ и таким образом поворачивается на 90 градусов по часовой стрелке.
Затем, если на фазу A подается отрицательный ток по отношению к A’, образование полюсов статора заставляет ротор двигаться еще на 90 градусов по часовой стрелке. Таким же образом, если фаза B возбуждается отрицательным током при замыкании переключателя фазы A, ротор вращается еще на 90 градусов в том же направлении. Затем, если фаза A возбуждается положительным током, ротор возвращается в исходное положение, совершая полный оборот на 360 градусов. Это подразумевает, что при возбуждении статор, ротор имеет тенденцию вращаться на 90 градусов по часовой стрелке. Угол шага этого 2-фазного 2-полюсного ротора с постоянным магнитом выражается как 360 / (2 х 2) = 90 градусов. Размер шага может быть уменьшен путем одновременного включения двух фаз или последовательности режимов однофазного включения и двухфазного включения с правильной полярностью.
Гибридный шаговый двигатель
Это наиболее популярный тип шагового двигателя, поскольку он обеспечивает лучшую производительность, чем шаговый двигатель с постоянными магнитами, дискретностью шага, удерживающего момента и скорости. Однако эти двигатели стоят дороже. Этот тип сочетает в себе лучшие характеристики шаговых двигателей с переменным сопротивлением и шаговых двигателей с постоянными магнитами. Эти двигатели используются в устройствах, где требуется очень маленький угловой шаг, такой как 1,5, 1,8 и 2,5 градуса.
Конструкция гибридного шагового двигателя
Статор этого двигателя такой же, как у других типов. Катушки статора намотаны на чередующиеся полюса. При этом на каждом полюсе намотаны катушки разных фаз, обычно две катушки на полюсе, который называется бифилярным соединением.
Ротор состоит из постоянного магнита, который намагничен в осевом направлении для создания пары магнитных полюсов ( «+» и «-» полюсов). Каждый полюс покрыт равномерно расположенными зубцами. Зубья состоят из мягкой стали и двух секций, из которых на каждом полюсе смещены друг относительно друга на пол-зубца.
Принцип работы гибридного шагового двигателя
Этот двигатель работает аналогично двигателю с постоянным магнитом. На рисунке выше показан 2-фазный, 4-полюсный, 6-зубчатый роторный гибридный шаговый двигатель. Когда возбуждается фаза A-A’ источником постоянного тока, оставляя B-B’ невозбужденным, ротор выравнивается так, что «+» полюс ротора обращен к «-» полюсу статора, а «+» полюс ротора обращен к «-» полюсу статора.
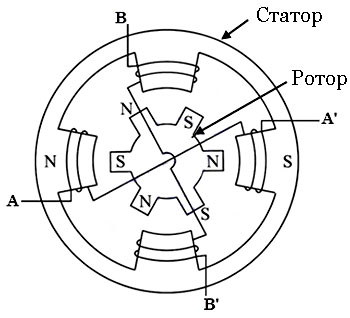
Теперь, если возбуждается фаза B-B’, и если A-A’ отключить таким образом, что верхний полюс станет «+», а нижний «-«, тогда ротор выровняется в новое положение, двигаясь в направлении против часовой стрелки. Если фаза B-B’ возбуждается противоположным образом, так что верхний полюс становится «-«, а нижний «+», тогда ротор поворачивается по часовой стрелке. При правильной последовательности импульсов поданных на обмотки статора, двигатель будет вращаться в нужном направлении. При каждом возбуждении ротор блокируется в новом положении, и даже если возбуждение снимается, двигатель все еще сохраняет свое заблокированное состояние из-за возбуждения от постоянного магнита. Угол шага этого 2-фазного 4-полюсного 6-зубчатого роторного двигателя задан как 360 / (2 х 6) = 30 градусов. На практике гибридные двигатели конструируются с большим количеством полюсов ротора, чтобы получить высокое угловое разрешение.
Униполярные и биполярные шаговые двигатели
Рассмотренные выше двигатели могут быть однополярными или биполярными на основе устройств обмотки катушки. Однополярный двигатель используется с двумя обмотками на фазу, и, следовательно, направление тока через эти обмотки изменяет вращение двигателя. В этой конфигурации поток тока проходит через одно направление в одной катушке и противоположное направление в другой катушке.
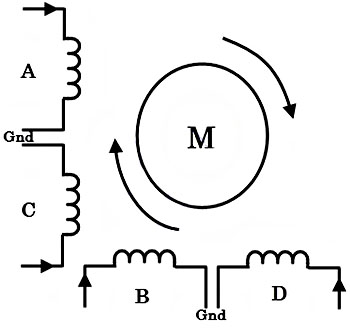
На рисунке ниже показан двухфазный однополярный шаговый двигатель, в котором катушки A и C предназначены для одной фазы, а B и D для другой фазы. В каждой фазе каждая катушка проводит ток в направлении, противоположном направлению другой катушки. Только одна катушка будет проводить ток за раз в каждой фазе для достижения определенного направления вращения. Так что, просто переключая клеммы на каждую катушку, контролируется направление вращения.
В случае биполярного шагового двигателя каждая фаза состоит из одной обмотки, а не двух в случае однополярной. При этом направление вращения контролируется путем изменения направления тока через обмотки. Следовательно, он требует более сложной схемы привода для реверсирования тока.
Шаговые двигатели имеют три основных режима работы:
— полный шаг — за 1 импульс ротор совершает 1 шаг;.
— полушаг — за 1 импульс ротор совершает оборот на ½ шага за 1 такт.
— микрошаг — дробление значений оборотов ротора за 1 импульс на ¼, ⅛ и т.д. шага.
Полный шаг
One phase on full step – одна фаза на полный шаг.
Этот вариант был описан в примерах ранее, он заключается в попеременной коммутации фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является использовании половины обмоток для биполярного двигателя, и лишь четверть для униполярного.
Two-phase-on full step — две фазы на полный шаг.
Этот вариант полношагового режима управления при котором в одно и то же время включены две фазы на полный шаг. Называется – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки. Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага.
Полушаг
Этот способ позволяет получить в два раза больше шагов на оборот ротора от двигателя. На четных шагах возбуждается одна фаза, а на нечетных — возбуждаются сразу две. В результате такого подключения угловой шаг уменьшается в два раза. При использовании данного варианта приходится мериться с потерей момента. Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий. Для фиксирования положения ротора, необходимо подать на обмотки двигателя ток удержания. Данная возможность позволяет обходиться без механических фиксаторов, тормозных систем и т.п. В полушаговом режиме шаговый двигатель делает два раза больше шагов за оборот. Полушаговый режим обеспечивает более плавное вращение, чем полношаговый, но при переключении между обмотками теряется до 30% крутящий момент.
Микрошаговый
Для получения еще большего числа шагов двигателя применяют микрошаговый режим. Включают две фазы, как на полушаговом режиме, но токи обмоток распределяют не равномерно. Магнитное поле статора смещается между полюсами, смещая и положение ротора. Как правило, разница токов между рабочими фазами происходит с определенной дискретностью, это и называется микрошагом. Микрошаговый режим способен значительно повысить точность позиционирования шагового двигателя. Хотя система управления приводом становится намного сложнее. Этот режим используется в ситуациях, когда требуется высокоточное позиционирование. Как и в случае полушаговой операции, микрошаг повышает точность позиционирования за счет уменьшения крутящего момента.
Преимущества шагового двигателя
— точность позиционирования, погрешность отдельного шага не накапливается с шагами;
— низкая инертность при старте, реверсе и остановке;
— высокая надежность, из-за отсутствия трущихся деталей;
— скорость двигателя прямо пропорциональна частоте входных импульсов, таким образом, может быть достигнут широкий диапазон скорости вращения;
Шаговые двигатели (подробный разбор 4 типов)
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Как работает шаговый электродвигатель?
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы

Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.

С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.

С постоянным магнитом
Гибридные
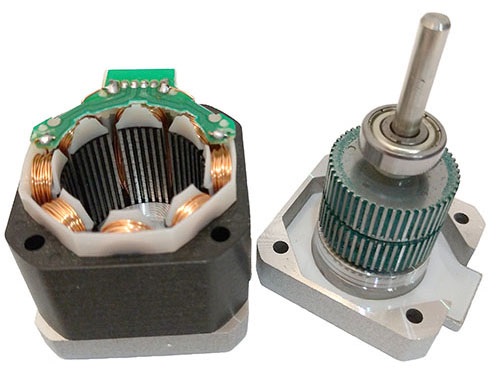
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

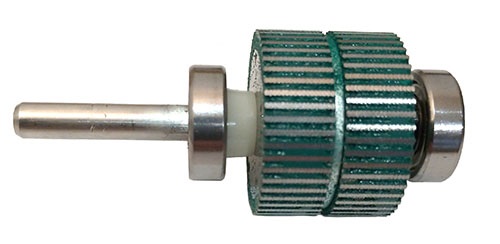
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
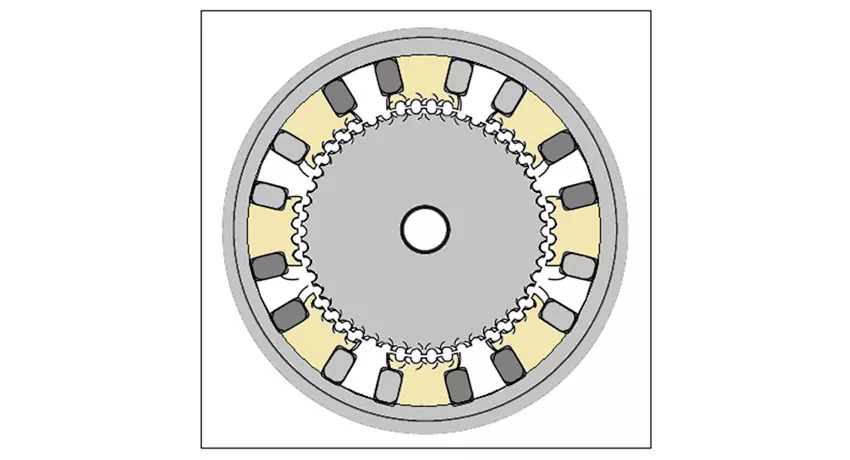
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:

Расположение пазов гибридника
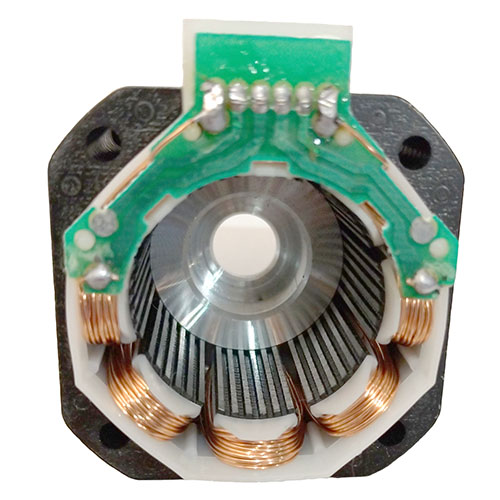
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.

Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.

Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.

Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.

Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:

Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.

Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.

Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.

Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.

Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД

Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.

Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).

Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Что такое шаговый двигатель и как им управлять

Шаговые двигатели имеют ряд преимуществ, таких как высокая точность позиционирования, высокий крутящий момент на малых скоростях, отсутствие необходимости в датчиках обратной связи для контроля положения оси, а также простота управления. Всё это дало им возможность проникнуть практически во все отрасли промышленности, где они стали незаменимым инструментом.
Материал обновлён 11.07.2023
Время чтения: 22 минуты

Увлечённые и опытные авторы компании, разбирающиеся в измерительном, оптическом и паяльном оборудовании
Шаговый двигатель — это бесщёточный электродвигатель, в работе которого используется постоянный электроток. Его вращение осуществляется пошагово, на строго установленный угол. Такое дискретное (пошаговое) движение позволяет выставить вал в нужном положении с очень высокой точностью.
Скорость поворота, а также число совершаемых шагов может быть установлена оператором индивидуально. Эти параметры определяются частотой, а также количеством управляющих импульсов, переданных на обмотки мотора.
 Электромотор SUMTOR 86HS15060A4J (NEMA 34)
Электромотор SUMTOR 86HS15060A4J (NEMA 34)
Отличие степ-моторов от сервоприводов
В отличие от сервопривода шаговые или степ-моторы поворачиваются только на фиксированный угол — шаг. Это обеспечивает высокую точность совершаемых движений. У сервоприводов угол свободного поворота обычно ограничен диапазоном в 180° или 360°. У шаговых двигателей (ШД) такое ограничение отсутствует. Их конструкция позволяет им вращаться в любом направлении неограниченно долго. Однако управлять этими устройствами несколько сложнее, чем это реализовано у сервоприводов. Для них нужно использовать специальное устройство — драйвер или управляющую плату.
В статье «Управление движением: всё что нужно знать о сервоприводах» вы более подробно узнаете о видах, устройстве, а также выборе сервоприводов.
Область применения
Степ-моторы очень широко распространены. Их применяют во множестве устройств там, где требуется точное позиционирование, а также контроль интенсивности вращения. Вот пример таких областей, где их наиболее часто используют:
- Печатная, сканирующая, а также гравировальная техника;
- Робототехника и автоматизированные системы производства;
- Телескопы и оборудование оптического наблюдения;
- Оборудование для измерения и контроля (шаговые счётчики);
- Техника для обработки и резки материалов (станки с ЧПУ);
- Электронные замки, двери и автоматические ворота.
Здесь приведена только небольшая часть тех областей, где используют ШД. На самом деле их применяют повсеместно, во множестве устройств и автоматических систем.
Принцип работы
Как и любой электромотор, ШД состоит из статора, а также якоря (ротора). Обмотки (катушки), индуцирующие электромагнитное (ЭМ) поле, размещены в статоре, в специальных пазах. Ротор электрической машины представляет из себя стальной стержень, на который установлен один или несколько постоянных магнитов. Также существуют конструкции без магнитов. Их конструкция выполнена из магнитомягкого материала — электротехнической стали.
Когда на одну из обмоток мотора подаётся электрическая энергия, она начинает генерировать постоянное электромагнитное поле. Имитирующее поле постоянного магнита. Поэтому катушки в статоре также называют полюсами. Из-за действия магнитных сил магнит притягивается к обмотке. Это заставляет поворачивается электрическую машину на соответствующий угол. При вращении, полюса ротора и статора приближаются друг к другу, после чего перемещение прекращается. Это движение называется шагом .
При подаче тока на следующую катушку статора вал вновь поворачивается и вновь останавливается. Так совершается ещё один шаг. Число импульсов, поданных на обмотки, определяет количество совершенных ходов. От того с какой частотой подаются импульсы, зависит интенсивность вращения мотора. Количество ходов, совершаемых за один полный оборот вала, отражает плавность движения. Чем их больше — тем оно плавнее.
Технические характеристики
Технические характеристики — это отличительные черты установки характеризующая её, а также позволяющие сравнить с другими.
 Степ-мотор SUMTOR 57HS10042A4 (NEMA 23)
Степ-мотор SUMTOR 57HS10042A4 (NEMA 23)
Крутящий (динамический) момент
Это механическая характеристика электродвигателя. Она отражает номинальное усилие (нагрузку), создаваемое на вращающемся валу.
Удерживающий (статический) момент
Это механическое усилие, которое необходимо приложить к якорю для начала его вращения и преодоления статического сопротивления. Статическое сопротивление, в первую очередь, обусловлено силой трения на подвижных элементах степ-мотора.
Стопорный (тормозящий) момент
Это величина усилия, гарантированно останавливающее вращение. При увеличении нагрузки происходит постепенное снижение скорости движения. При достижении определённого критического значения электромотор окончательно останавливается.
Номинальное напряжение
Это одна из основных характеристик. Величина номинального напряжения зависит от индуктивности обмоток электродвигателя. Также она напрямую влияет на величину вращающего усилия.
Номинальный ток
Он отражает величину нагрузки, потребляемой из сети. Также его значение используют для определения потребляемой мощности, подбора управляющей платы и защитной аппаратуры.
Угол полного шага
Этот параметр показывает нам, на сколько градусов за один шаг поворачивается вал. Зная его величину, можно определить количество ходов, совершаемых степ-мотором за один полный оборот. Для этого нужно 360° разделить на угол полного шага. Например, 360°/1,8° = 200 шагов/оборот.
Момент инерции ротора
Этот показатель характеризует время, за которое разгоняется электромотор. На величину инерции основное влияние оказывает масса ротора.
Габаритные размеры
Этот параметр не менее важен при выборе электрической машины. Длина, высота и ширина корпуса могут стать серьёзным препятствием при размещении степ-мотора. Также не менее важными показателями являются длина и диаметр вала.
Виды и конструкция
Чаще всего ШД различаются:
- конструктивным исполнением;
- количеством выводов;
- схемой соединения обмоток;
- видом управляющего сигнала;
Также электрическая машина может иметь другие дополнительные элементы или конструктивные особенности.
Конструктивное исполнение
По конструктивному исполнению ШД делятся на:
- Электродвигатели с ротором из постоянного магнита;
- Электродвигатели с ротором из магнитомягкого материала;
- Гибридные электродвигатели.
Шаговые электродвигатели с ротором из постоянного магнита
Они имеют надёжную, конструктивно простую, а также дешёвую в изготовлении классическую конструкцию. Катушки, создающие электромагнитное поле, размещены в статоре. Подвижная часть устройства состоит из стального вала, а также размещённого на нём постоянного магнита. Если магнитов на валу размещается несколько, то их располагают так, чтобы магнитные полюса чередовались — север, юг, север, юг и так далее.
При подаче электропитания на один из полюсов в нём возникает электромагнитное поле. Оно притягивает ближайший полюс постоянного магнита. Под действием магнитных сил полюса сближаются, создавая вращение. Это действие приводит к совершению одного шага.
При подаче питания на следующий полюс происходит то же самое, а движение повторяется. Вал проворачивает ещё раз. Чаще всего количество ходов, затрачиваемых на совершение одного оборота, определяется количеством установленных в статоре катушек.
 Устройство классического степ-мотора
Устройство классического степ-мотора
Шаговые электродвигатели с ротором из магнитомягкого материала
В этих электрических машинах якорь выполнен из электротехнической стали. На его поверхности имеются специальные выступы (зубья). Такие же зубья присутствуют на полюсах электромагнитных обмоток статора. Зубья на поверхности ротора расположены таким образом, чтобы при вращении, они совпадали только с зубьями двух противоположных друг другу электромагнитных полюсов.
При подаче электрического питания на противолежащие полюса они создают электромагнитное поле, которое замыкающееся через металл якоря.
Сила, возникающая при этом, приводит его в движение, сокращая расстояние между зубьями якоря и активного полюса.
За счет зубчатой формы, магнитное поле на выступах концентрируется сильнее. Эта особенность и позволяет подтягивать зубцы друг к другу.
Чем больше число зубьев размещено на поверхности – тем больше ходов нужно сделать для совершения полного оборота. Также количество зубьев определяет минимальный угол поворота ротора.
К недостаткам подобной конструкции относится отсутствие тормозящего усилия. То есть при полном отключении электропитания движение не прекратится сразу. Оно будет замедляться, а время выбега будет зависеть от сил трения и величины инерции.
 Устройство мотора с ротором из магнитомягкого материала
Устройство мотора с ротором из магнитомягкого материала
Гибридные электродвигатели
Гибридные степ-моторы – усовершенствованная версия ранее описанных конструкций. Эти электрические машины имеют якорь из магнитомягкого материала разделённый на две секции. На его поверхности имеются зубья, а внутрь встроен постоянный магнит.
Наличие постоянного магнита позволяет создать тормозящее усилие, а также улучшить соотношение статического и динамического моментов машины. За счёт наличия двойного ряда зубьев, выполненных со смещением, друг относительно друга, гибридные машины могут совершать ходов больше,е за один оборот.
В остальном существенных различий электромотор не имеет, а принцип его работы практически аналогичен машинам с магнитомягким якорем.
 Общий вид гибридного электромотора
Общий вид гибридного электромотора
Виды степ-моторов
Электромоторы делятся по числу используемых выводов, а также схеме соединения. Количество отходящих проводов может составлять: четыре, пять, шесть или восемь. В зависимости от способа присоединения выводов получают биполярную или униполярную схему.
Биполярная схема питания предполагает, что электропитание на мотор подаётся всего по четырём проводам. Такое соединение по уже умолчанию реализовано у тех моторов, в которых имеется всего четыре питающих вывода. В их конструкции предусмотрено всего две рабочие обмотки. Если от степ-мотора отходят питающие выводы в количестве пять, шесть или восемь, то биполярное соединение в них получают искусственно, путём объединения выводов в определённой последовательности.
Униполярную схему получают только в машинах, имеющих пять, шесть или восемь питающих выводов. Для получения униполярного соединения, помимо начала и конца, у обмоток используется ещё их средняя точка. В пяти, а также шестипроводных электромоторах она уже организована. В восьмипроводных — эту точку получают искусственно, путём определённого присоединения полуобмоток.
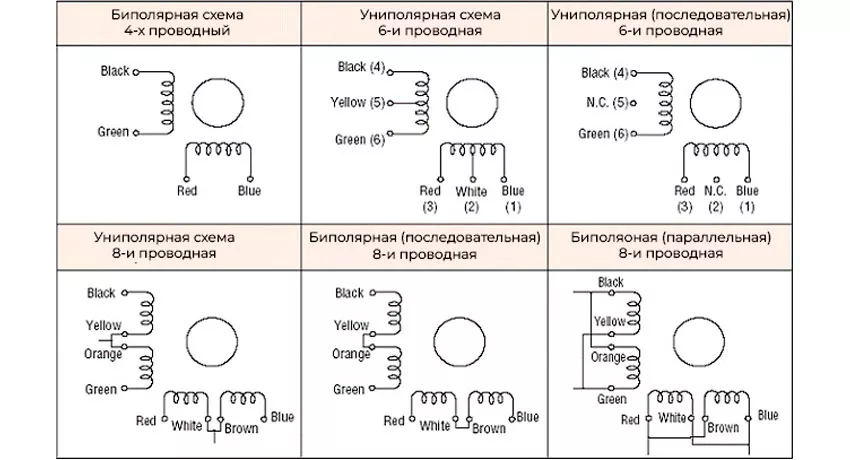 Виды соединения обмоток в многопроводных электродвигателях
Виды соединения обмоток в многопроводных электродвигателях
Однополярная и биполярная схемы, использующие полуобмотки, не дают большого крутящего усилия на низких оборотах. Это связано с тем, что в них используется меньше витков проволоки. Однако из-за низкой индуктивности им хорошо удаётся удерживать крутящее усилие при высоких скоростях движения.
Биполярное соединение использует катушку полностью, поэтому оно создает очень хорошее крутящее усилие на низких оборотах. Однако это усилие быстро падает при ускорении. Причина этому — высокая собственная индуктивность.
Биполярная схема с параллельным включением полуобмоток использует возможности электромагнитных катушек полную. Она обеспечивает хорошие характеристики на низких скоростях. Также она создаёт низкую индуктивность, что позволяет поддерживать высокий крутящий момент на больших скоростях. Однако параллельное включение полуобмоток в биполярной схеме имеет важное преимущество. У неё на 40% большая мощность, а также потребление.
 Зависимость крутящего момента от скорости при различных видах соединения
Зависимость крутящего момента от скорости при различных видах соединения
Как видно из механической характеристики, биполярное соединение предпочтительнее в случаях, когда требуется силовое действие привода. Униполярное соединение эффективно при выполнении скоростных операций.
Режимы работы
В зависимости от требуемой от степ-мотора точности выделяют следующие режимы:
- Полношаговый;
- Полушаговый;
- Микрошаговый.
Полношаговый режим наиболее часто используется. Его преимуществом является простота реализации. При этом выделяют два вида полношаговых режима: однофазный и двухфазный.
При однофазном режиме управляющий сигнал подаётся только на одну катушку. Для совершения поворота снимается электропитание с текущей катушки и подаётся на следующую.
В двухфазном режиме питание на полюса статора подаётся попарно. При этом полюс якоря занимает промежуточное положение.
В обоих случаях вал проворачивается на одинаковый угол (один шаг или ход). Однако в двухфазном режиме результирующая сила электромагнитного поля будет выше в 1,41 раза, а соответственно, и действующее на якорь крутящее усилие.
 Демонстрация работы степ-мотора в полношаговом режиме: однофазном (слева) и двухфазном (справа)
Демонстрация работы степ-мотора в полношаговом режиме: однофазном (слева) и двухфазном (справа)
Полушаговый режим сочетает в себе оба ранее описанных варианта управления. При его использовании вначале подаётся электропитание на катушку «А», затем на «А» и «В», потом только на «В» и так далее. При таком управлении якорь электромотора поворачивается на полушаг. Это увеличивает точность движения механизма в два раза. Уменьшение угла поворота ведёт к снижению вибрации, а также уменьшению резонансной частоты.
 Принцип работы ШД в полушаговом режиме
Принцип работы ШД в полушаговом режиме
Микрошаговый режим применяется реже, так как для его реализации требуется специальный драйвер. Он позволяет значительно уменьшить угол поворота.
Принцип его действия схож с полушаговым режимом. В нём также используется сразу две смежные обмотки. Для получения большего количества промежуточных микрошагов на них подаются различные комбинации уровней напряжения. Это позволяет установить вал в большее число промежуточных положений. Максимально возможное число положений, ограничивается только характеристиками применяемого в схеме драйвера.
 Диаграмма электропитания степ-мотора и положение его якоря при создании промежуточных микрошагов
Диаграмма электропитания степ-мотора и положение его якоря при создании промежуточных микрошагов
Управление степ-мотором
Управляющий сигнал, посылаемый на степ-мотор, может иметь синусоидальную или импульсную форму. В дополнение к этому, импульсные сигналы могут быть биполярными, имитирующими синусоиду, а также униполярными — не снижающими свой потенциал ниже нуля.
Синусоидальная форма сигналов применяются в аналоговых схемах. Для её формирования используется уже готовый синусоидальный сигнал из электрической сети.
Такая особенность позволяет значительно упростить электрическую схему. Однако для согласования действия смежных катушек требуется сложная и тонкая настройка.
Сейчас, в связи с повсеместным применением цифровой техники, для управления степ-моторами аналоговые сигналы практически не применяются.
Импульсные управляющие сигналы, в контроле над ШМ, применяются повсеместно. Это связано с популярностью цифровой техники, а также доступности и разнообразию современных цифровых контроллеров. Для генерации импульсов используется широтно-импульсная модуляция (ШИМ).
Использование цифровых сигналов позволяет не только пошагово управлять степ-мотором, но также задавать ему сложную программу действий. Например, управлять временем вращения, длительностью простоя, а также скоростью переключения шага.
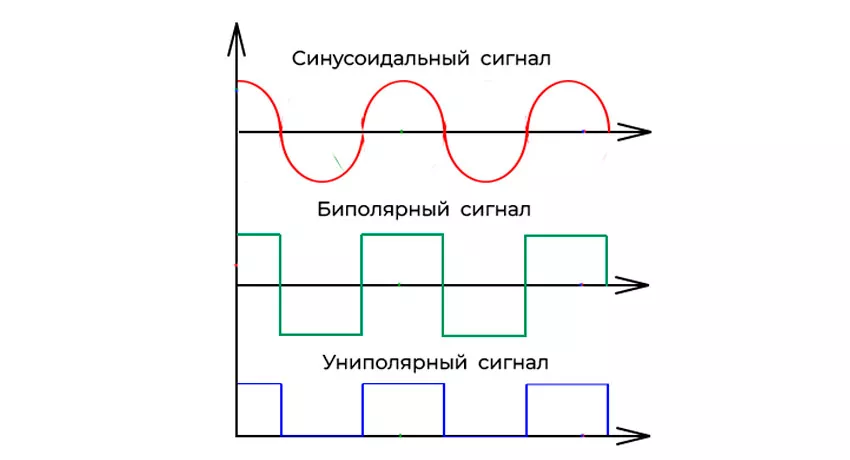 Формы управляющих сигналов
Формы управляющих сигналов
Питание
В качестве источника питания должен использоваться внешний источник. Это позволяет максимально исключить влияние нагрузки на микрокомпьютер.
При выборе питающего напряжения следует отталкиваться от требований управляющей платы. Это может быть как постоянный, так и переменный ток с напряжениями в диапазоне от 5 до 110 В, в зависимости от модели драйвера.
Не следует подключать мотор к плате Ардуино или Raspberry напрямую. Даже если это маломощное устройство. Обратные токи, возникающие при остановке электромотора, могут привести к повреждению контроллера.
Подключение через драйвер
Низкая цена, а также способность точного позиционирования сделали ШД востребованным компонентом. Они нашли своё применение в робототехнике, а также в станках с числовым программным управлением (ЧПУ).
Наиболее популярный способ использования — это подключить мотор к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто. Для этого нужен любой Ардуино-совместимый контроллер и плата управления (драйвер).
Прежде всего, драйвер нужен, чтобы обеспечить поступление электроэнергии на катушки статора. Также он отвечает за частоту их коммутации, силу управляющего тока, а также он выполняет защитные функции.
 Драйвер SUMTOR MB450A (4,2 А, одноканальный, двухфазный)
Драйвер SUMTOR MB450A (4,2 А, одноканальный, двухфазный)
На современных устройствах располагаются две группы контактов, а также блок переключателей. Первая группа контактов — управляющие. Обычно по ним передаются сигналы включения, действия, а также определения направления движения. В устройствах SUMTOR они обозначены как: ENA, PUL, а также DIR.
ENA — пара контактов принимающая сигнал о разрешении или запрете работы электромотора;
IR — контакты, отвечающие за определение, в каком направлении будет вращаться электрическая машина;
PUL — принимает импульсы, которые отвечают за совершение одного или нескольких ходов.
Вторая группа контактов используется для присоединения электродвигателя, а также его источника питания.
Пары A+/A- и B+/B- используются для присоединения катушек электромотора;
DC — контакты для подачи питания от источника постоянного тока.
AC — пара контактов для подключения переменного напряжения.
Группа переключателей SW используется для ограничения величины питающего тока, а также создания необходимого числа микрошагов. Требуемые параметры настраиваются согласно таблице, нанесённой на корпус драйвера, путём включения и отключения переключателей.
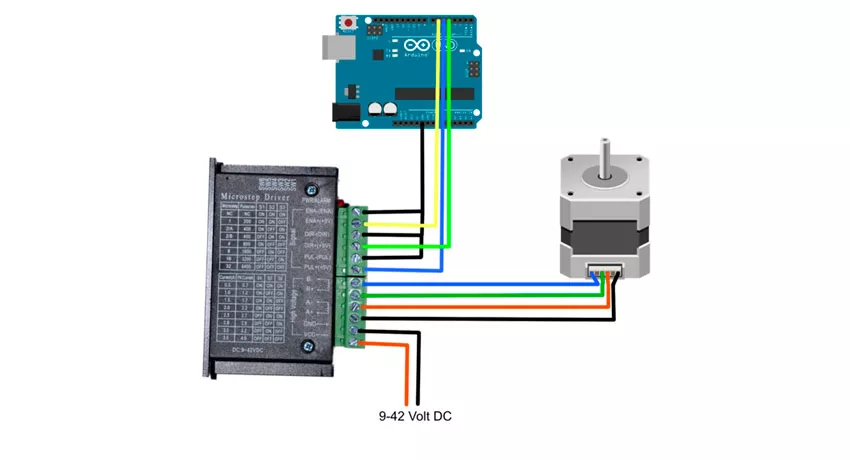 Схема подключения ШД к плате Arduino Uno при помощи платы управления SUMTOR
Схема подключения ШД к плате Arduino Uno при помощи платы управления SUMTOR
Организовать необходимое функционирование мотора довольно просто, например, используя микроконтроллер на базе чипа ATMega. После присоединения всех элементов, а также настройке управляющей платы, нужно выполнить программирование микроконтроллера. Для этого составляется программа (скетч). Пример такого скетча приводится ниже.
pinMode(5, OUTPUT); // Puls
pinMode(6, OUTPUT); // Enable
pinMode(4, OUTPUT); // Direction
for(Index = 0; Index < 5000; Index++)
digitalWrite(5,HIGH);
delayMicroseconds(500);
digitalWrite(5,LOW);
delayMicroseconds(500);
for(Index = 0; Index < 5000; Index++)
digitalWrite(5,HIGH);
delayMicroseconds(500);
digitalWrite(5,LOW);
delayMicroseconds(500);
Преимущества
Главное преимущество — это их точность. ШД может быть быстро запущен, а также быстро остановлен. Для выполнения этих действий требуется минимальное время. ШД обладает высокой надёжностью, а также стабильной работой при высоких нагрузках.
Он не нуждается в датчиках или других элементах, обеспечивающих обратную связь. Его позиционирование полностью определяется поступающими от контроллера импульсами.
Большой рабочих диапазон скоростей позволяет задействовать в самых разных механизмах или обеспечить многоскоростную работу.
Доступная цена, простота в установке, настройке, а также использовании.
Недостатки
- Наличие резонансной частоты. Появление резонанса связано колебаниями якоря возникающим после выполнения хода. На величину резонанса влияет инерция якоря, а также ширина совершаемого шага.
- Отсутствие обратной связи. При высоких скоростях, а также превышении нагрузки на возможны пропуски шагов.
- Постоянное потребление энергии. Для удержания ротора в неподвижном положении требуется непрерывное подведение электрического тока к обмоткам.
- Уменьшение момента с ростом скорости. Величина динамического усилия напрямую связана со скоростью. Эту особенность нужно обязательно учитывать.
- Обязательное наличие управляющего драйвера. При необходимости точного позиционирования, а также при использовании мощных ШД наличие платы управления — обязательное условие.
Сравнение
Высокой популярностью пользуются биполярные ШД марок и UMot.
SUMTOR — крупный производитель, специализирующийся на производстве как моторов, так и драйверов управления к ним. Электромоторы SUMTOR производятся в соответствии со стандартом NEMA и имеют различные номинальные характеристики питающего напряжения, тока, а также крутящего момента. Вот некоторые из них:
| Наименование | Номинальный ток, А | Напряжение питания, В | Крутящий момент, Н*см | Габаритные размеры, ШхВхД, мм | Угол поворота, град. | Число фаз, шт. |
|---|---|---|---|---|---|---|
| SUMTOR 20HS2806A4 (NEMA 8) | 0,6 | 2 | 1,4 | 20,3 х 20,3 х 28 | 1,8 | 2 |
| SUMTOR 57HS5106A4 (NEMA 23) | 0,63 | 8,2 | 110 | 56,4 х 56,4 х 51 | 1,8 | 2 |
| SUMTOR 35HS2808A4 (NEMA 14) | 0,8 | 4,8 | 12 | 35 х 35 х 28 | 1,8 | 2 |
| SUMTOR 42HS4013A4 (NEMA 17) | 1,3 | 3,3 | 40 | 42,3 х 42,3 х 40 | 1,8 | 2 |
| SUMTOR 57HS11242A4D8 (NEMA 23) | 4,2 | 6 | 300 | 56,4 х 56,4 х 112 | 1,8 | 2 |
| SUMTOR 86HS12660A4 (NEMA 34) | 6 | 3,7 | 950 | 86 х 86 х 126 | 1,8 | 2 |
| Наименование | Номинальный ток, А | Напряжение питания, В | Крутящий момент, Н*см | Габаритные размеры, ШхВхД, мм | Передаточное число |
|---|---|---|---|---|---|
| UMot 42HSC1409 | 1,33 | 2,93 | 27 | 42 х 42 х 34 | 1:100 |
| UMot 57HS5417 NEMA 23 | 2 | 1,7 | 95 | 57 х 57 х 55 | 1:7,5 |
 Электрическая машина 57HS6425A4
Электрическая машина 57HS6425A4
Что нужно учитывать при выборе?
Шаговые электродвигатели — эффективное решение, если нужно достичь точного перемещения механизма. Эти устройства — бюджетная альтернатива сервоприводам. Благодаря уже существующим библиотекам, а также драйверам ими легко управлять.
К основным параметрам, по которым производится выбор ШД, относятся: производитель, габаритные размеры, крутящий момент, номинальный ток и напряжение, а также конструктивное исполнение.