4.2 Обзор конструкций травмобезопасных рулевых колонок
Рулевым управлением называется совокупность устройств, осуществляющих поворот управляемых колес автомобиля [13].
Рулевое управление служит для изменения и поддержания направления движения автомобиля. Оно в значительной степени обеспечивает безопасность движения автомобиля.
Рулевое управление автомобиля состоит из двух частей — рулевого механизма и рулевого привода.
В рулевой механизм входят рулевое колесо, рулевой вал и рулевая передача, которая определяет тип рулевого механизма.
В рулевой привод входят рулевая сошка, рулевые тяги, рычаги маятниковый и поворотных цапф, а также рулевой усилитель, устанавливаемый на ряде автомобилей. При этом рулевые тяги и рычаги поворотных цапф образуют рулевую трапецию, которая определяет тип рулевого привода.
На автомобилях изменение направления движения осуществляется поворотом передних колес различными типами рулевых управлений (рисунок 4.3).
Применение левого или правого рулевого управления зависит от принятого в той или иной стране направления движения транспорта.
Левое рулевое управление применяется в автомобилях большинства стран, где принято правостороннее движение транспорта (Россия, США и др.), а правое рулевое управление – в странах с левосторонним движением транспорта (Япония, Великобритания). При этом рулевое колесо, установленное с левой или правой стороны автомобиля, обеспечивает лучшую видимость при разъезде с транспортом, движущимся навстречу.
Рисунок 4.3 – Типы рулевых управлений, классифицированных по различным признакам
Применение рулевого управления различной конструкции (без усилителя или с усилителем) зависит от типа и назначения автомобиля. Рулевые управления без усилителя обычно устанавливаются на легковых автомобилях особо малого и малого классов и грузовых малой грузоподъемности.
Травмобезопасное рулевое управление является одним из конструктивных мероприятий, обеспечивающих пассивную безопасность автомобиля – свойство уменьшать тяжесть последствий дорожно-транспортных происшествий. Рулевой механизм рулевого управления может нанести серьезную травму водителю при лобовом столкновении с препятствием при смятии передней части автомобиля, когда рулевой механизм перемещается в сторону водителя.
Элемент пассивной безопасности автомобиля – рулевая колонка, имеющая возможность деформироваться таким образом, чтобы исключить получение водителем травм при аварийном наезде автомобиля на препятствие. Изобретена Белой Барени в 1967 г. (фирма Мерседес).
Водитель также может получить травму от рулевого колеса или рулевого вала при резком перемещении вперед вследствие лобового столкновения, когда при слабом натяжении ремней безопасности перемещение составляет 300. 400 мм. Для уменьшения тяжести травм, получаемых водителем при лобовых столкновениях, которые составляют более 50% всех дорожно-транспортных происшествий, применяют различные конструкции травмобезопасных рулевых механизмов. С этой целью кроме рулевого колеса с утопленной ступицей и двумя спицами, позволяющими значительно снизить тяжесть наносимых травм при ударе, в рулевом механизме устанавливают специальное энергопоглощающее устройство, а рулевой вал часто выполняют составным. Все это обеспечивает незначительное перемещение рулевого вала внутрь кузова автомобиля при лобовых столкновениях с препятствиями, автомобилями и другими транспортными средствами.
На рисунке 4.4, а представлен рулевой механизм легкового автомобиля, рулевой вал которого состоит из трех частей, соединенных карданными шарнирами 2, а роль энергопоглощающего устройства выполняет специальное крепление рулевого вала к кузову автомобиля. При лобовом столкновении, когда передняя часть автомобиля деформируется, рулевой вал складывается и незначительно перемещается в салон кузова автомобиля. При этом кронштейн 1 крепления рулевого вала деформируется и поглощает часть энергии удара.
Рулевой механизм с энергопоглощающим устройством сильфонного типа показан на рисунке 3.4, б. Рулевое колесо соединено с рулевым валом металлическим гофрированным цилиндром 3, который при столкновении деформируется, частично поглощает энергию удара и обеспечивает небольшое перемещение рулевого вала в сторону водителя.
На рисунке 3.4, в представлен рулевой механизм, у которого верхняя часть рулевого вала выполнена в виде перфорированной трубы 4. Показаны также последовательный процесс и максимальная деформация верхней части рулевого вала, которая весьма значительна.

Рисунок 4.4 – Травмобезопасные рулевые механизмы:
а — рулевой вал, состоящий из трех частей; б — рулевой вал с энергопоглощающим устройством сильфонного типа; в — рулевой вал с перфорированной трубой; 1 — кронштейн; 2 — карданный шарнир; 3 — цилиндр; 4 — труба
В травмобезопасных рулевых управлениях легковых автомобилей применяются и другие энергопоглощающие устройства, которые соединяют составные рулевые валы. К ним относятся резиновые муфты специальной конструкции, а также устройства типа «японский фонарик», которые выполнены в виде нескольких продольных пластин, приваренных к концам соединяемых частей рулевого вала. При столкновениях резиновая муфта разрушается, а соединительные пластины деформируются и уменьшают перемещение рулевого вала внутрь салона кузова [13].
С целью погашения энергии удара смещающегося при лобовом столкновении назад силового агрегата в трубку рулевой колонки установлены кулачковые фиксаторы, разрушающиеся при превышении возникающей перегрузкой некоторого определенного значения. При разрушении фиксаторов они соприкасаются мысками друг с другом, воспринимая на себя изгибающую колонку нагрузку (рисунок 4.5) [14].

Рисунок 4.5 – Принцип действия ударопоглащающей рулевой колонки:
1 – срезная пластина; 2 – кулачковые фиксаторы; 3 – срезная пластина перед ударом; 4 – срезная пластина после удара
Еще одним приспособлением, призванным поглощать энергию продольного удара является срезная пластина, устанавливаемая между рулевой колонкой и закрепленным на несущей балке кронштейном фиксирующего механизма регулировки высоты положения колонки. При превышении возникающей перегрузкой некоторого определенного значения упор пластины срезается, динамически поглощая энергию удара.
Крепление рулевой колонки обеспечивается посредством установленной поперек автомобиля несущей балки. Балка размещается на минимальном возможном удалении от рулевого колеса с целью максимального снижения консольной нагрузки. Верхний подшипник рулевого вала также устанавливается как можно ближе к рулевому колесу, обеспечивая надежную опору, гарантирующую наиболее полное погашение возникающих во время движения вибраций.
Травмобезопасное рулевое управление
Для снижения травматизма водителей и снижения тяжести последствий фронтальных столкновениях автомобилей в рулевом управлении предусмотрены различные конструкции. Существуют травмобезопасные рулевые механизмы различных конструкций. Основная задача состоит в том, чтобы снизить силу, наносящего травму водителю, за счет поглощения энергии удара. Прежде всего на автомобиле устаналивается энергопоглощающее рулевое колесо. Представленная на рис. 9.5 конструкция рулевого колеса имеет утопленную ступицу и две спицы, что позволяет значительно снизить тяжесть травм при ударе о них грудью при слабом натяжении ремней безопасности или значительном перемещении в салон рулевого вала.
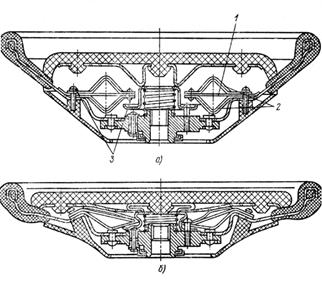
Рис 9.5. Энергопоглощающее рулевое колесо: а – в обычном состоянии; б – в деформированном состоянии.
В рулевом механизме устанавливаются специальные энергопоглощающие устройства, а рулевой вал в отдельных случаях выполняют составным из нескольких частей (рис. 9.6, 9.7). По способу уменьшения перемещения верхней части рулевой колонки внутрь кузова и поглощения энергии удара водителя о рулевое колесо существующие рулевые управления разделяют на несколько групп.
1. Уменьшающие только перемещение верхней части рулевой колонки внутрь кузова за счет расположения частей рулевого вала под углом одна к другой с установкой в местах пересечения осей шарниров или эластичных муфт.
2. Установкой в верхней части рулевого вала под рулевым колесом сильфона, деформирующегося при ударах.
3. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет деформации элементов вала за счет несоосности и параллельности частей рулевого вала, соединенных разрушающимся элементом.
4. Уменьшение перемещения рулевого и поглощение энергии удара за счет разрушения и деформации сетчатой или сплошной гофрированной рулевой колонки.
5. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет разрушения одной из сопрягаемых частей рулевого вала или рулевой колонки путем вдавливания при телескопированиив стенки наружной и внутренней труб колонки перекатывающихся стальных шариков.
6. Уменьшение перемещения рулевого вала внутрь кузова за счет телескопирования и поглощения энергии удара за счет трения частей рулевого вала, рулевой колонки или обеих частей.
На рис. 9.6 и 9.7 представлены некоторые варианты конструкции травмобезопасного рулевого управления.
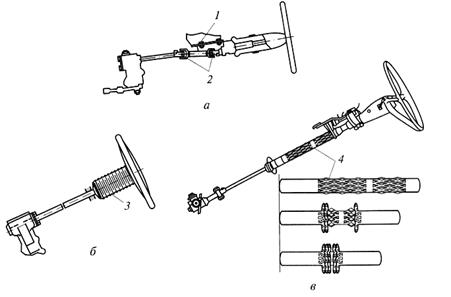
Рис. 9.6. Травмобезопасные рулевые механизмы: а – рулевой вал с карданными шарнирами; б – рулевой вал с энергопоглощающим сильфоном; в – рулевой вал с перфорированной трубой; 1 – кронштейн; 2 – карданная передача; 3 –гофрированный цилиндр; 4 — перфорированная труба
В рулевом механизме с карданным рулевым валом (рис. 9.6, а) при лобовом ударе карданные шарниры 2 складываются, что уменьшает перемещение конца вала в салон автомобиля, а кронштейн 1 деформирутся, за счет чего поглощается часть энергии удара.
В рулевом механизме с сильфоном (рис. 9.6, б) рулевое колесо с рулевым валом соединено с помощью гофрированного цилиндра 3, который при лобовых столкновениях деформируется, уменьшая перемещение рулевого вала в салон автомобиля и частично поглощая энергию удара.
Применяются и рулевые механизмы, у которых рулевой вал в верхней части выполняется в перфорированном виде (рис. 9.6, б). При столкновениях 4 перфорация деформируется в той последовательности, которая представлена на рисунке.
На рис. 9.7 представлен вариант травмобезопасного рулевого механизма с резиновой муфтой 3 и предохранительными пластинами 2, которые крепятся к фланцам 1 составного рулевого вала.
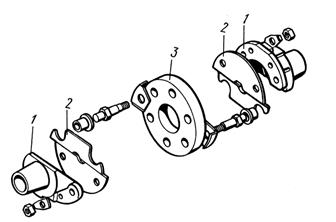
Рис. 9.7. Травмобезопасный рулевой механизм с резиновой муфтой и предохранительными пластинами
Согласно действующим нормативам, рулевое управление считается безопасным, если при испытаниях травмобезопасных рулевых механизмов при лобовом ударе о бетонный куб при скорости 48,3км/ч верхний конец рулевого вала не перемещается в горизонтальном направлении более чем на 127мм, а при ударе со скоростью 24,1км/ч усилие на рулевую колонку не превышает 11350н.
Рулевые механизмы
Рулевой механизм служит для увеличения усилия, создаваемого водителем на рулевом колесе, и преобразования вращательного движения в поступательное движение рулевого привода.
Передаточное число рулевого механизма для различного типа автомобилей составляет 15…25, что позволяет за один-два полных оборота рулевого колеса повернуть управляемые е колеса на максимальный угол 35 0 …45 0 .
Кроме общих требований к рулевым механизмам предъявляются и специальные требования, согласно которым рулевой механизм должен обеспечить:
• высокое значение прямого КПД и меньшее значение обратного КПД;
• обратимость рулевого управления, не снижающую способность стабилизации управляемых колес;
• минимальный зазор в механизме при нейтральном положении управляемых колес и возможность его регулировки;
• заданную характеристику передаточного отношения механизма.
На автомобилях применяются рулевые механизмы различного типа (рис. 9.8).
Рис. 9.8. Типы рулевых механизмов
Наибольшее распространение на легковых и грузовых автомобилях получили червячно-роликовые рулевые механизмы (рис. 9.9) за счет высокого прямого КПД и малого обратного КПД. Высокое значение КПД обусловлено тем, что контактирующие поверхности обкеатываются друг по другу, а не скользят. По сравнению с другими червячными механизмами эта конструкция более компактна.
При нейтральном положении рулевого колеса передаточное отношение рулевого механизма червячно-роликового типа определяется по формуле:
где r0 – начальный радиус глобоиды в наименьшем сечении;
tч – шаг винтовой линии червяка;
zч – число заходов червяка.
При повороте рулевого колеса от нейтрального положения передаточное отношение рулевого механизма червячно-роликового типа возрастает на 5%…7%.
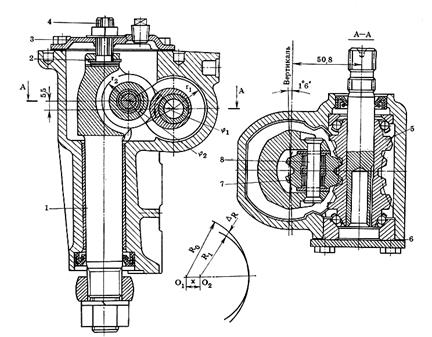
Рис. 9.9. Рулевой механизм типа глобоидный червяк-двухгребневый ролик
На рис. 9.9 представлена конструкция рулевого механизма типа глобоидный червяк-двухгребневый ролик автомобилей ВАЗ. В нем глобоидный червяк 5 напрессован на вал, установленный на двух шариковых радиально-упорных подшипниках, регулируемых прокладками 6. Червяк находится в зацеплении с двухгребневым роликом 7, установленным на оси 8на иглльчатом подшипнике. Для обеспечения регулировки зацепления ось 8 ролика 7 смещена по отношению к оси червяка на 5…7мм. Регулировка осуществляется винтом 4, ввернутым снаружи в рулевого механизма в верхнюю крышку картера 3. Головка винта с регулировочной шайбой 2 входит в паз головки вала сошки 1. Осевой зазор между головкой винта и пазом вала должен быть не более 0,05мм. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,85 и ηмр =0,70.
Рулевые механизмы червячно-секторного типа (рис.9.10 и 9.11) получили распространение на грузовых автомобилях.
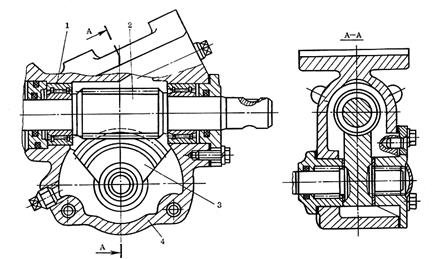
Рис.9.10. Рулевой механизм типа цилиндрический червяк-центральный сектор
В рулевом механизме типа цилиндрический червяк-центральный сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с центральным червячным сектором 3. Такой рулевой механизм имеет сравнительно большие габариты и массу. В нем затруднено обеспечение необходимой регулировки зацепления. За счет того, что контактирующие поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,55.
Передаточное число такого рулевого механизма определяется по формуле:
где z1 – число заходов червяка;
z2 – число зубьев всего червячного колеса, частью которого является данный центральный сектор.
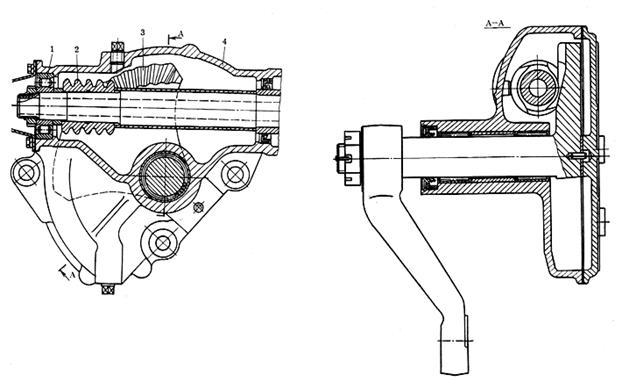
Рис. 9.11. Рулевой механизм типа цилиндрический червяк-боковой сектор
В рулевом механизме типа цилиндрический червяк-боковой сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с боковым сектором 3. Такой рулевой механизм имеет по сравнению с предыдущей конструкцией меньшие габариты и массу. Регулировка зацепления осуществляется подбором толщины бронзовой шайбы, установленной между опорной поверхностью сектора и боковой крышкой картера. Осевой зазор в зацеплении при повороте вала сошки из среднего положения в крайнее изменяется от 0,03 до 0,5мм. Поскольку и в этом рулевом механизме поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,5.
В рулевом механизме данного типа цилиндрический червяк нарезается с постоянным шагом t и передаточное отношение определяется по формуле:
где rω – радиус начальной окружности цилиндрического червяка;
z1 – число заходов червяка;
γ1 и γ2 – углы наклона винтовой линии червяка и зубьев червячного сектора.
Винтовые рулевые механизмы используются на тяжелых грузовых автомобилях и, как правило, в сочетании с зубчатыми. На рис. 9.12 представлена конструкция винто-реечного рулевого механизма типа винт-гайка-рейка-сектор. В этом рулевом механизме трение скольжения заменено на трение качения, для чего между винтом и гайкой размещены 90…120 шариков, циркулирующих в замкнутом направляющих трубках 4. Вращение винтового вала 6 преобразуется в поступательное движение гайки-рейки 5 и далее во вращательное движение зубчатого сектора и вала сектора 1. Регулируется данное зацепление вращением винта 2, сферическая головка которого упирается в шайбу 3. При этом сектор вместе с валом сошки смещаются и зазор в зацеплении уменьшается. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,87 и ηмр =0,82.
Передаточное отношение такого рулевого механизма определяется по формуле:
где r0 – радиус начальной окружности зубьев сектора;
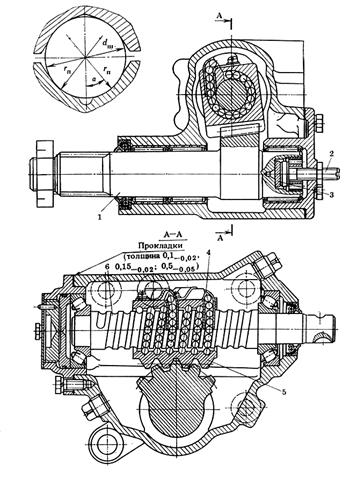
Рис. 9.12. Рулевой механизм типа винт-гайка-рейка-сектор
Винто-рычажные рулевые механизмы не получили широкого применения, так как имеют низкое значение КПД и при высокой склонности к износу не обеспечивают возможность регулирования зазора в зацеплении.
Зубчатые (реечные) рулевые механизмы в отдельном виде применяются в легковых автомобилях малого и среднего класса. На грузовых автомобилях в рулевых механизмах в сочетании с другими видами зацепления применяются цилиндрические или конические передачи.
Реечный рулевой механизм (рис. 9.13) выполняется в виде зубчатого редуктора, в котором вращение от рулевого колеса через рулевой вал 1 передается шестерне 2. Вращательное движение шестерни преобразуется в поступательное движение рейки 3 и далее рулевых тяг. Преимуществом такого механизма является простота и компактность конструкции, высокий прямой КПД (ηрм =0,90…0,95). Вместе с тем, из-за высокого значения обратного КПД (ηмр =0,90…0,95) такие рулевые механизмы не поглощают толчки, передаваемые от дороги на рулевое колесо, поэтому они применяются на легковых автомобилях малого класса. На легковых автомобилях с более высокого класса необходимо устанавливать рулевые усилители, которые поглощение толчков принимают на себя.
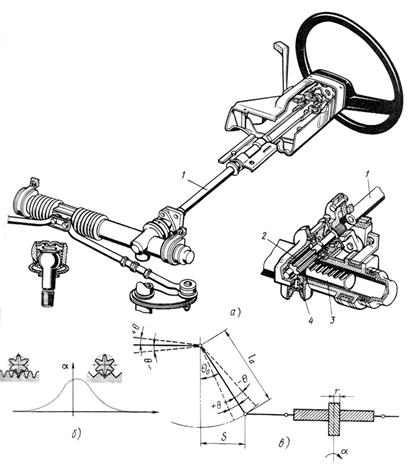
Рис. 9.13. Реечный рулевой механизм: а – конструкция; б – характеристика передаточного отношения; в – схема к определению передаточного отношения рулевого управления
Угловое передаточное отношение рулевого управления определится из зависимости:
где lа – длина поворотного рычага;
θ0 – угол среднего положения поворотного рычага;
θ – угол поворота управляемых колес;
r – радиус шестерни.
Поскольку значение угла θ меняется, передаточное отношение рулевого управления с реечным механизмом переменно.
Усилие, передаваемое от рулевого колеса на рейку определится из соотношения:
где Pрк – усилие на рулевом колесе;
Rрк – радиус рулевого колеса;
rω – радиус начальной окружности шестерни.
Рулевой привод
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Травмобезопасные рулевая колонка и узел педалей
Травмобезопасная рулевая колонка. При фронтальном наезде поперечная панель может смещаться, например для автомобиля New Beetle 150 мм, прежде чем она упрется в рулевую колонку. В связи с этим в автомобилях применяется специальная травмобе- зопаспая колонка 3 (рис. 4.33). При сильных ударах длина рулевой колонки сокращается в трех местах, предотвращая перемещение рулевого колеса в глубь салона.
Если поперечная панель 1 упирается в рулевую колонку, длина последней может сократиться на 50 мм. При направлении удара снизу длина рулевого вала 5 между шарнирами 4 может сокра-

Рис. 4.33. Травмобезопасная рулевая колонка автомобиля New Beetle:
1 — поперечная панель; 2 — рулевое колесо; 3 — рулевая колонка; 4 — карданные шарниры; 5 — рулевой вал
титься на 38 мм. В случае налегания водителя на надутую подушку безопасности рулевая колонка сдвигается на 50 мм.
Травмобезопасный узел педалей. В легковых автомобилях для предотвращения травм от перемещения узла педалей может применяться коленчатая стойка 3 (рис. 4.34).

Рис. 4.34. Травмобезоиасный узел педалей:
а — состояние узла при обычных условиях движения; б — состояние узла при тяжелых фронтальных наездах; 1 — передняя часть салона; 2 — центральная труба; 3 — коленчатая стойка; 4 — толкатель главного тормозного цилиндра
При тяжелых фронтальных наездах с сильными деформациями структуры кузова педаль тормоза отклоняется из зоны ног под действием коленчатой стойки 3. Этот эффект достигается в результате деформации передней панели салона 1, причем он не зависит от начального положения педали. При фронтальном наезде узел педалей смещается в направлении центральной трубы 2 остова кузова. В результате коленчатая стойка складывается и при дальнейшем перемещении перегибает толкатель 4 главного тормозного цилиндра. При этом опорная поверхность педали отводится в сторону на расстояние до 170 мм. Изгиб толкателя, происходящий с затратой энергии на деформацию деталей, используется для амортизации углового перемещения упирающейся в педаль ноги водителя. В результате существенно снижаются усилия, действующие на ногу.
Как устроены травмобезопасные рулевые управления
Совокупность конструктивных элементов, применяемых для защиты пассажиров от травм при аварии, составляет систему пассивной безопасности ТС, действие которой направлено на снижение тяжести дорожно-транспортного происшествия.. Большинство систем пассивной безопасности срабатывают во время столкновения, если активные системы безопасности не смогли помочь водителю предотвратить столкновение или избежать его. Система должна обеспечивать защиту не только пассажиров и конкретного автомобиля, но и других участников дорожного движения.
Важнейшими компонентами системы пассивной безопасности (SRS — Supplementary Restrait System) современных ТС (рис. 1) являются:
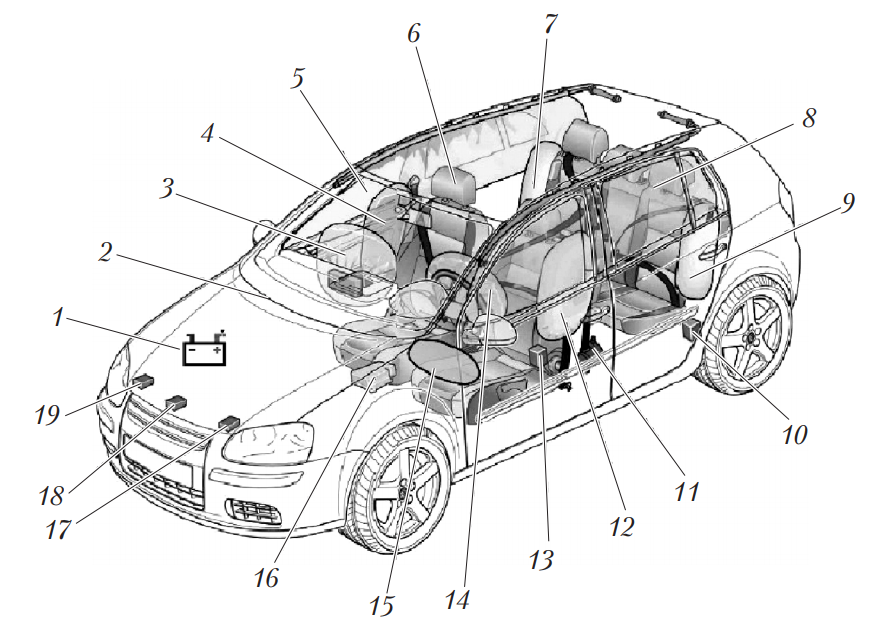
Рис. 1. Компоненты системы пассивной безопасности: 1 — аварийный выключатель АКБ; 2 — безопасный самооткрывающийся при столкновении капот; 3 — подушка безопасности переднего пассажира; 4, 5 — боковая подушка безопасности переднего пассажира; 6 — активные подголовники; 7 — задняя правая подушка безопасности; 8 — левая головная подушка безопасности; 9 — левая задняя подушка безопасности; 10 — датчик удара задней подушки безопасности со стороны водителя; 11 — натяжитель ремня безопасности; 12 — боковая подушка безопасности водителя; 13 — датчик удара боковой подушки безопасности водителя; 14 — подушка безопасности водителя; 15 — коленная подушка безопасности; 16 — блок управления подушек безопасности; 17 — датчик удара фронтальной подушки безопасности водителя; 18 — датчик срабатывания пиропатрона капота; 19 — датчик удара фронтальной подушки безопасности переднего пассажира
Современной разработкой является система защиты пешеходов. Особое место в пассивной безопасности автомобиля занимает система экстренного вызова.
Системы пассивной безопасности автомобиля имеют электронное управление, обеспечивающее эффективное взаимодействие большинства компонентов. Конструктивно система управления включает датчики, блок управления и исполнительные устройства.
Датчики фиксируют параметры, при которых возникает аварийная ситуация, и преобразуют их в электрические сигналы. К ним относятся датчики удара, выключатели замка ремня безопасности, датчик занятости сиденья переднего пассажира, а также датчик положения сиденья водителя и переднего пассажира. На каждую из сторон автомобиля устанавливается, как правило, по два датчика удара. Они обеспечивают работу соответствующих подушек безопасности. При оборудовании автомобиля активными подголовниками с электрическим приводом датчики удара применяются в задней части. Выключатель замка ремня безопасности фиксирует использование ремня безопасности. Датчик занятости сиденья переднего пассажира позволяет в случае аварийной ситуации и отсутствии на переднем сиденьи пассажира сохранить соответствующую подушку безопасности. В зависимости от положений сидений водителя и переднего пассажира, которые фиксируются соответствующими датчиками, изменяется порядок и интенсивность применения компонентов системы.
Сравнивая сигналы датчиков с контрольными параметрами, блок управления распознает наступление аварийной ситуации и активизирует необходимые исполнительные устройства элементов системы.
К исполнительным устройствам системы пассивной безопасности относятся пиропатроны подушек безопасности, натяжителей ремней безопасности, аварийного размыкателя аккумуляторной батареи, механизма привода активных подголовников (при использовании подголовников с электрическим приводом), а также контрольная лампа, сигнализирующая о непристегнутых ремнях безопасности. Активизация исполнительных устройств производится в соответствии с заложенным программным обеспечением.
В зависимости от типа и класса ТС применяются различные сочетания компонентов системы пассивной безопасности.
2. Травмобезопасные рулевая колонка и узел педалей
Травмобезопасная рулевая колонка. При фронтальном наезде поперечная панель может смещаться, например для автомобиля New Beetle 150 мм, прежде чем она упрется в рулевую колонку. В связи с этим в автомобилях применяется специальная травмобезопасная колонка 3 (рис. 2). При сильных ударах длина рулевой колонки сокращается в трех местах, предотвращая перемещение рулевого колеса в глубь салона.
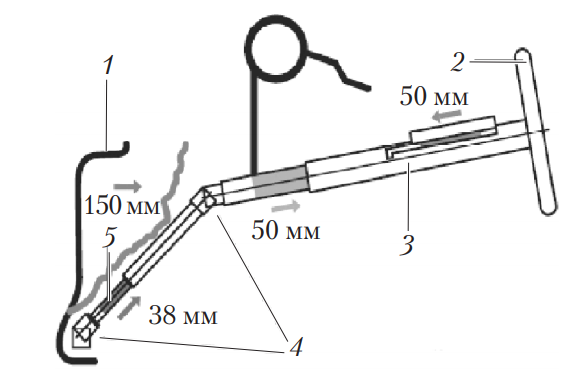
Рис. 2. Травмобезопасная рулевая колонка автомобиля New Beetle: 1 — поперечная панель; 2 — рулевое колесо; 3 — рулевая колонка; 4 — карданные шарниры; 5 — рулевой вал
Если поперечная панель 1 упирается в рулевую колонку, длина последней может сократиться на 50 мм. При направлении удара снизу длина рулевого вала 5 между шарнирами 4 может сократиться на 38 мм. В случае налегания водителя на надутую подушку безопасности рулевая колонка сдвигается на 50 мм.
Травмобезопасный узел педалей. В легковых автомобилях для предотвращения травм от перемещения узла педалей может применяться коленчатая стойка 3 (рис. 3).
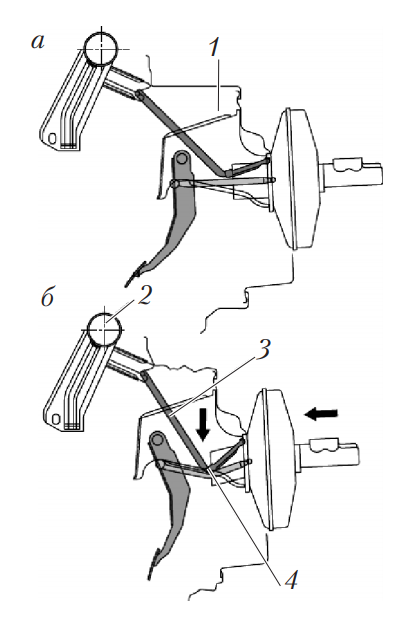
Рис. 3. Травмобезопасный узел педалей: а — состояние узла при обычных условиях движения; б — состояние узла при тяжелых фронтальных наездах; 1 — передняя часть салона; 2 — центральная труба; 3 — коленчатая стойка; 4 — толкатель главного тормозного цилиндра
При тяжелых фронтальных наездах с сильными деформациями структуры кузова педаль тормоза отклоняется из зоны ног под действием коленчатой стойки 3. Этот эффект достигается в результате деформации передней панели салона 1, причем он не зависит от начального положения педали. При фронтальном наезде узел педалей смещается в направлении центральной трубы 2 остова кузова. В результате коленчатая стойка складывается и при дальнейшем перемещении перегибает толкатель 4 главного тормозного цилиндра. При этом опорная поверхность педали отводится в сторону на расстояние до 170 мм. Изгиб толкателя, происходящий с затратой энергии на деформацию деталей, используется для амортизации углового перемещения упирающейся в педаль ноги водителя. В результате существенно снижаются усилия, действующие на ногу.
3. Аварийный размыкатель аккумуляторной батареи
Аварийный размыкатель аккумуляторной батареи предназначен для предотвращения короткого замыкания в электрической системе и возможного возгорания автомобиля. Им оснащаются автомобили, у которых аккумуляторная батарея установлена в салоне или багажном отделении.
Длинный кабель, соединяющий батарею со стартером, у автомобилей, в которых батарея устанавливается в салоне или багажнике, может быть причиной пожара из-за его повреждения при аварии. Поэтому при срабатывании подушки безопасности с помощью пиропатрона производится отключение кабеля к стартеру и генератору от положительного вывода батареи. Питание остальной бортовой сети сохраняется, так как при аварии необходимо сохранение работоспособности аварийной сигнализации и освещения. Безопасные клеммы могут прекратить подачу тока разрывом соединяющей перемычки, отстрелом штифта клеммы или иным воздействием.
В безопасных клеммах с разрывной перемычкой (рис. 4) при воспламенении пиротехнического заряда давление газа воздействует на находящийся на поршне палец, который разрывает соединение между контактами.
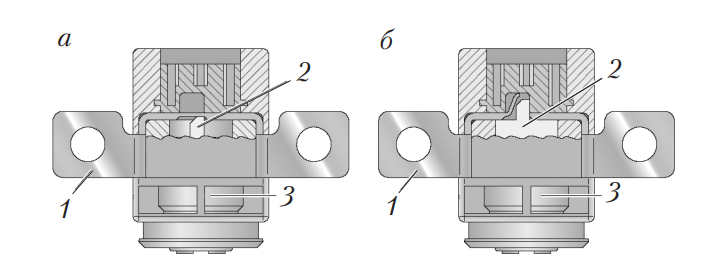
Рис. 4. Безопасная клемма с разрывной перемычкой: а — разрывная перемычка в обычном состоянии; б — разрывная перемычка при срабатывании пиропатрона; 1 — соединительный элемент с разрывной перемычкой; 2 — палец с поршнем; 3 — запал
В безопасных клеммах с отстрелом штифта (рис. 5) кабель отключается от положительного вывода отсоединением его конического штифта 1 при срабатывании пиропатрона. Случайное возобновление соединения наконечника кабеля с выводом батареи предотвращается уловителем 1 с двумя захватами.
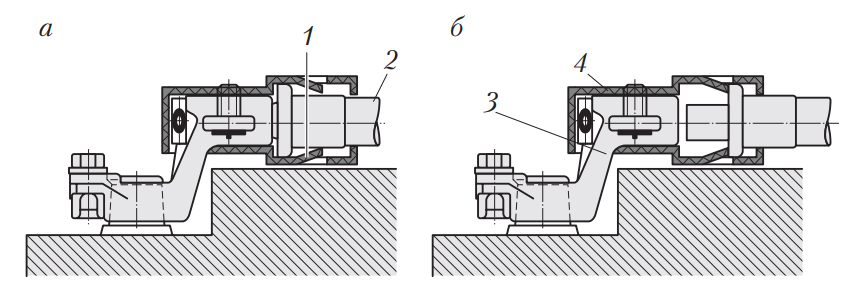
Рис. 5. Безопасная клемма с отстрелом штифта: а — до срабатывания отстрела; б — после срабатывания отстрела; 1 — конический уловитель (штифт); 2 — кабель, соединяющий плюсовую клемму со стартером; 3 — плюсовая клемма; 4 — пластмассовая оболочка
Управление пиропатроном и его диагностика производятся с помощью блока управления подушек безопасности.
Пиропатрон срабатывает при каждом раскрытии подушек безопасности, после чего его необходимо заменить.
4. Система экстренного вызова
Система экстренного вызова служит для автоматического оповещения аварийных служб о ДТП и своевременного оказания медицинской помощи пострадавшим. Использование системы экстренного вызова позволяет значительно сократить уровень травматизма при ДТП.
Известными системами экстренного вызова являются:
- Assist Advanced eCall от BMW;
- Connect SOS от Peugeot;
- Localized Emergency Call от Citroёn;
- SYNC Emergency Assistance от Ford;
- Volvo On Call от Volvo.
Система Assist Advanced eCall распознает тяжесть ДТП по показаниям датчиков систем активной и пассивной безопасности.
После чего она сканирует все доступные GSM-сети и выбирает канал для передачи SMS-сообщения об аварии. Система автоматически связывается с центром экстренных вызовов BMW и предоставляет подробную информацию о ДТП:
- точное местоположение;
- скорость автомобиля;
- скорость замедления автомобиля;
- количество пассажиров;
- положение автомобиля (наличие опрокидывания);
- количество сработавших подушек безопасности;
- количество сработавших натяжителей ремней безопасности.
По полученным данным прогнозируется тяжесть травм пассажиров, срочность и объем оказания медицинской помощи. Сразу после происшествия система устанавливает прямую голосовую связь между людьми в автомобиле и специалистами колл-центра BMW. Уточняется характер аварии и состояние пассажиров. Аварийные службы вызываются на основании обобщенных данных. Если пассажиры без сознания и не отвечают на запросы, вызов аварийных служб производится на основании переданных системой данных. К месту аварии выдвигаются специализированные автомобили.
При необходимости может использоваться вертолет. Параллельно выбирается ближайшее лечебное учреждение, соответствующее типу и тяжести полученных травм.
Вызов аварийных служб можно произвести вручную из салона автомобиля, например для того, чтобы предупредить о происшествии с другими участниками движения.
Аналогичным образом работают системы от Peugeot и Citroёn.
В отличие от систем экстренного вызова, использующих связь с центром конкретного автопроизводителя по подписке, система SYNC Emergency Assistance от компании Ford автоматически связывается непосредственно с государственной аварийной службой. Связь осуществляется по мобильному телефону водителя, подключенного к мультимедийной системе SYNC через Bluetooth.
Система Volvo On Call является проектом компании Volvo по повышению безопасности водителя, она объединяет в себе средства по вызову экстренных служб и оказанию помощи водителю в дороге, а также обеспечивает получение информации об автомобиле на данный момент времени с помощью мобильного телефона владельца.

Рис. 6. Кнопки связи с колл-центром Volvo и вызова экстренных служб на передней панели автомобиля Volvo S60
Система устанавливается на автомобиль уже в базовой комплектации. С помощью нее одним нажатием кнопки (рис. 6) можно связаться с аварийными службами, которые могут установить местоположение ТС и направить необходимую помощь. Если же столкновение настолько серьезно, что в автомобиле сработали подушки безопасности, сигнал аварийным службам посылается автоматически. Система также сообщает о попытке злоумышленника проникнуть в автомобиль; если автомобиль похищен, его местонахождение определяется с помощью спутника.
В аварийный центр через установленный в автомобиле телефон передаются GPS-данные о местонахождении автомобиля и другая информация, затем налаживается телефонная связь. Систему аварийного вызова можно включить вручную.
Чтобы снизить последствия аварии и облегчить спасение людей, применяются специальный меры. К ним относятся, например, автоматическое выключение двигателя, включение аварийной световой сигнализации и освещения салона. Центральная блокировка замков автоматически снимается, а крэш-зазоры между дверями и крыльями облегчают открытие дверей после лобового столкновения. Кроме того, фирмы-производители предоставляют руководства по спасению на нескольких языках, которые можно скачать с интернет-сайтов в любой точке мира.
Травмобезопасный рулевой механизм
Травмобезопасное рулевое управление является одним из конструктивных мероприятий, обеспечивающих пассивную безопасность автомобиля – свойство уменьшать тяжесть последствий дорожно-транспортных происшествий. Рулевой механизм рулевого управления может нанести серьёзную травму водителю при лобовом столкновении с препятствием при смятии передней части автомобиля, когда весь рулевой механизм перемещается в сторону водителя.
Водитель также может получить травму от рулевого колеса или рулевого вала при резком перемещении вперёд вследствие лобового столкновения, когда при слабом натяжении ремней безопасности перемещение составляет 300…400 мм. Для уменьшения тяжести травм, получаемых водителем при лобовых столкновениях, которые составляют около 50% всех дорожно-транспортных происшествий, применяют различные конструкции травмобезопасных рулевых механизмов.
С этой целью кроме рулевого колеса с утопленной ступицей и двумя спицами, позволяющих значительно снизить тяжесть наносимых травм при ударе, в рулевом механизме устанавливают специальное энергопоглащающее устройство, а рулевой вал часто выполняют составным. Все это обеспечивает незначительное перемещение рулевого вала внутрь кузова автомобиля при лобовых столкновениях с препятствиями, автомобилями и другими транспортными средствами.
В травмобезопасных рулевых управлениях легковых автомобилей применяются и другие энергопоглащающие устройства, которые соединяют составные рулевые валы. К ним относятся резиновые муфты специальной конструкции, а также устройства типа «японский фонарик», который выполнен в виде нескольких продольных пластин, приваренных к концам соединяемых частей рулевого вала. При столкновениях резиновая муфта разрушается, а соединительные пластины деформируются и уменьшают перемещение рулевого вала внутри салона кузова.
Основными элементами колеса в сборе являются обод с диском и пневматическая шина, которая может быть бескамерной или состоять из покрышки, камеры и ободной ленты.
Травмобезопасное рулевое управление
Для снижения травматизма водителей и снижения тяжести последствий фронтальных столкновениях автомобилей в рулевом управлении предусмотрены различные конструкции. Существуют травмобезопасные рулевые механизмы различных конструкций. Основная задача состоит в том, чтобы снизить силу, наносящего травму водителю, за счет поглощения энергии удара. Прежде всего на автомобиле устаналивается энергопоглощающее рулевое колесо. Представленная на рис. 9.5 конструкция рулевого колеса имеет утопленную ступицу и две спицы, что позволяет значительно снизить тяжесть травм при ударе о них грудью при слабом натяжении ремней безопасности или значительном перемещении в салон рулевого вала.
Рис 9.5. Энергопоглощающее рулевое колесо: а – в обычном состоянии; б – в деформированном состоянии.
В рулевом механизме устанавливаются специальные энергопоглощающие устройства, а рулевой вал в отдельных случаях выполняют составным из нескольких частей (рис. 9.6, 9.7). По способу уменьшения перемещения верхней части рулевой колонки внутрь кузова и поглощения энергии удара водителя о рулевое колесо существующие рулевые управления разделяют на несколько групп.
1. Уменьшающие только перемещение верхней части рулевой колонки внутрь кузова за счет расположения частей рулевого вала под углом одна к другой с установкой в местах пересечения осей шарниров или эластичных муфт.
2. Установкой в верхней части рулевого вала под рулевым колесом сильфона, деформирующегося при ударах.
3. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет деформации элементов вала за счет несоосности и параллельности частей рулевого вала, соединенных разрушающимся элементом.
4. Уменьшение перемещения рулевого и поглощение энергии удара за счет разрушения и деформации сетчатой или сплошной гофрированной рулевой колонки.
5. Уменьшение перемещения рулевого вала и поглощение энергии удара за счет разрушения одной из сопрягаемых частей рулевого вала или рулевой колонки путем вдавливания при телескопированиив стенки наружной и внутренней труб колонки перекатывающихся стальных шариков.
6. Уменьшение перемещения рулевого вала внутрь кузова за счет телескопирования и поглощения энергии удара за счет трения частей рулевого вала, рулевой колонки или обеих частей.
На рис. 9.6 и 9.7 представлены некоторые варианты конструкции травмобезопасного рулевого управления.
Рис. 9.6. Травмобезопасные рулевые механизмы: а – рулевой вал с карданными шарнирами; б – рулевой вал с энергопоглощающим сильфоном; в – рулевой вал с перфорированной трубой; 1 – кронштейн; 2 – карданная передача; 3 –гофрированный цилиндр; 4 — перфорированная труба
В рулевом механизме с карданным рулевым валом (рис. 9.6, а) при лобовом ударе карданные шарниры 2 складываются, что уменьшает перемещение конца вала в салон автомобиля, а кронштейн 1 деформирутся, за счет чего поглощается часть энергии удара.
В рулевом механизме с сильфоном (рис. 9.6, б) рулевое колесо с рулевым валом соединено с помощью гофрированного цилиндра 3, который при лобовых столкновениях деформируется, уменьшая перемещение рулевого вала в салон автомобиля и частично поглощая энергию удара.
Применяются и рулевые механизмы, у которых рулевой вал в верхней части выполняется в перфорированном виде (рис. 9.6, б). При столкновениях 4 перфорация деформируется в той последовательности, которая представлена на рисунке.
На рис. 9.7 представлен вариант травмобезопасного рулевого механизма с резиновой муфтой 3 и предохранительными пластинами 2, которые крепятся к фланцам 1 составного рулевого вала.
Рис. 9.7. Травмобезопасный рулевой механизм с резиновой муфтой и предохранительными пластинами
Согласно действующим нормативам, рулевое управление считается безопасным, если при испытаниях травмобезопасных рулевых механизмов при лобовом ударе о бетонный куб при скорости 48,3км/ч верхний конец рулевого вала не перемещается в горизонтальном направлении более чем на 127мм, а при ударе со скоростью 24,1км/ч усилие на рулевую колонку не превышает 11350н.
Рулевые механизмы
Рулевой механизм служит для увеличения усилия, создаваемого водителем на рулевом колесе, и преобразования вращательного движения в поступательное движение рулевого привода.
Передаточное число рулевого механизма для различного типа автомобилей составляет 15…25, что позволяет за один-два полных оборота рулевого колеса повернуть управляемые е колеса на максимальный угол 35 0 …45 0 .
Кроме общих требований к рулевым механизмам предъявляются и специальные требования, согласно которым рулевой механизм должен обеспечить:
• высокое значение прямого КПД и меньшее значение обратного КПД;
• обратимость рулевого управления, не снижающую способность стабилизации управляемых колес;
• минимальный зазор в механизме при нейтральном положении управляемых колес и возможность его регулировки;
• заданную характеристику передаточного отношения механизма.
На автомобилях применяются рулевые механизмы различного типа (рис. 9.8).
Рис. 9.8. Типы рулевых механизмов
Наибольшее распространение на легковых и грузовых автомобилях получили червячно-роликовые рулевые механизмы (рис. 9.9) за счет высокого прямого КПД и малого обратного КПД. Высокое значение КПД обусловлено тем, что контактирующие поверхности обкеатываются друг по другу, а не скользят. По сравнению с другими червячными механизмами эта конструкция более компактна.
При нейтральном положении рулевого колеса передаточное отношение рулевого механизма червячно-роликового типа определяется по формуле:
где r0 – начальный радиус глобоиды в наименьшем сечении;
tч – шаг винтовой линии червяка;
zч – число заходов червяка.
При повороте рулевого колеса от нейтрального положения передаточное отношение рулевого механизма червячно-роликового типа возрастает на 5%…7%.
Рис. 9.9. Рулевой механизм типа глобоидный червяк-двухгребневый ролик
На рис. 9.9 представлена конструкция рулевого механизма типа глобоидный червяк-двухгребневый ролик автомобилей ВАЗ. В нем глобоидный червяк 5 напрессован на вал, установленный на двух шариковых радиально-упорных подшипниках, регулируемых прокладками 6. Червяк находится в зацеплении с двухгребневым роликом 7, установленным на оси 8на иглльчатом подшипнике. Для обеспечения регулировки зацепления ось 8 ролика 7 смещена по отношению к оси червяка на 5…7мм. Регулировка осуществляется винтом 4, ввернутым снаружи в рулевого механизма в верхнюю крышку картера 3. Головка винта с регулировочной шайбой 2 входит в паз головки вала сошки 1. Осевой зазор между головкой винта и пазом вала должен быть не более 0,05мм. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,85 и ηмр =0,70.
Рулевые механизмы червячно-секторного типа (рис.9.10 и 9.11) получили распространение на грузовых автомобилях.
Рис.9.10. Рулевой механизм типа цилиндрический червяк-центральный сектор
В рулевом механизме типа цилиндрический червяк-центральный сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с центральным червячным сектором 3. Такой рулевой механизм имеет сравнительно большие габариты и массу. В нем затруднено обеспечение необходимой регулировки зацепления. За счет того, что контактирующие поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,55.
Передаточное число такого рулевого механизма определяется по формуле:
где z1 – число заходов червяка;
z2 – число зубьев всего червячного колеса, частью которого является данный центральный сектор.
Рис. 9.11. Рулевой механизм типа цилиндрический червяк-боковой сектор
В рулевом механизме типа цилиндрический червяк-боковой сектор цилиндрический червяк 2, установленный на подшипниках 1 в корпусе 4 находится в зацеплении с боковым сектором 3. Такой рулевой механизм имеет по сравнению с предыдущей конструкцией меньшие габариты и массу. Регулировка зацепления осуществляется подбором толщины бронзовой шайбы, установленной между опорной поверхностью сектора и боковой крышкой картера. Осевой зазор в зацеплении при повороте вала сошки из среднего положения в крайнее изменяется от 0,03 до 0,5мм. Поскольку и в этом рулевом механизме поверхности скользят друг по другу, прямой КПД не превышает ηрм = 0,7, а обратный КПД – ηмр = 0,5.
В рулевом механизме данного типа цилиндрический червяк нарезается с постоянным шагом t и передаточное отношение определяется по формуле:
где rω – радиус начальной окружности цилиндрического червяка;
z1 – число заходов червяка;
γ1 и γ2 – углы наклона винтовой линии червяка и зубьев червячного сектора.
Винтовые рулевые механизмы используются на тяжелых грузовых автомобилях и, как правило, в сочетании с зубчатыми. На рис. 9.12 представлена конструкция винто-реечного рулевого механизма типа винт-гайка-рейка-сектор. В этом рулевом механизме трение скольжения заменено на трение качения, для чего между винтом и гайкой размещены 90…120 шариков, циркулирующих в замкнутом направляющих трубках 4. Вращение винтового вала 6 преобразуется в поступательное движение гайки-рейки 5 и далее во вращательное движение зубчатого сектора и вала сектора 1. Регулируется данное зацепление вращением винта 2, сферическая головка которого упирается в шайбу 3. При этом сектор вместе с валом сошки смещаются и зазор в зацеплении уменьшается. Прямой и обратный КПД такого рулевого механизма составляют следующие значения: ηрм = 0,87 и ηмр =0,82.
Передаточное отношение такого рулевого механизма определяется по формуле:
где r0 – радиус начальной окружности зубьев сектора;
Рис. 9.12. Рулевой механизм типа винт-гайка-рейка-сектор
Винто-рычажные рулевые механизмы не получили широкого применения, так как имеют низкое значение КПД и при высокой склонности к износу не обеспечивают возможность регулирования зазора в зацеплении.
Зубчатые (реечные) рулевые механизмы в отдельном виде применяются в легковых автомобилях малого и среднего класса. На грузовых автомобилях в рулевых механизмах в сочетании с другими видами зацепления применяются цилиндрические или конические передачи.
Реечный рулевой механизм (рис. 9.13) выполняется в виде зубчатого редуктора, в котором вращение от рулевого колеса через рулевой вал 1 передается шестерне 2. Вращательное движение шестерни преобразуется в поступательное движение рейки 3 и далее рулевых тяг. Преимуществом такого механизма является простота и компактность конструкции, высокий прямой КПД (ηрм =0,90…0,95). Вместе с тем, из-за высокого значения обратного КПД (ηмр =0,90…0,95) такие рулевые механизмы не поглощают толчки, передаваемые от дороги на рулевое колесо, поэтому они применяются на легковых автомобилях малого класса. На легковых автомобилях с более высокого класса необходимо устанавливать рулевые усилители, которые поглощение толчков принимают на себя.
Рис. 9.13. Реечный рулевой механизм: а – конструкция; б – характеристика передаточного отношения; в – схема к определению передаточного отношения рулевого управления
Угловое передаточное отношение рулевого управления определится из зависимости:
где lа – длина поворотного рычага;
θ0 – угол среднего положения поворотного рычага;
θ – угол поворота управляемых колес;
r – радиус шестерни.
Поскольку значение угла θ меняется, передаточное отношение рулевого управления с реечным механизмом переменно.
Усилие, передаваемое от рулевого колеса на рейку определится из соотношения: