Характеристики асинхронных двигателей
Механические характеристики представляют собой зависимости угловой скорости вращения от электромагнитного момента 2=f (М) или момента от угловой скорости М=f(2), часто удобнее использовать зависимости момента от скольжения М=f(s) или от относительной скорости вращения М=f(), =2/1. Их вид представлен на рис.6.3
Судя по механической характеристике, максимум электро-магнитного момента достигается при скорости вращения ротора двигателя 2= (0,80,9)1, при 2=1 электромагнитный момент равен нулю, а пусковой момент при 2=0 составляет Мп=(0,30,7)Мmax. При достижении электромагнитным моментом максимального значения наступает предел устойчивости работы асинхронного двигателя, так как только на участке , где 0<s<sкр , изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Работа асинхронного двигателя становится неустойчивой при скольжениях s>sкр. Так, при максимальном электромагнитном моменте и s=sкр любое незначительное увеличение нагрузочного момента приводит к увеличению скольжения и уменьшению электромагнитного момента и этот процесс будет повторятся до полной остановки ротора двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов, действующих на ротор, была меньше максимального момента. Характеристикой надежности работы двигателя в условиях случайных кратковременных перегрузок, является перегрузочная способность . Она определяется отношением максимального момента к номинальному (=Мmax/Mн) и для большинства асинхронных двигателей составляет =1,72,5.
Точные аналитические описания механических характеристик представляют сложные выражения, в которых учитываются многие электрические параметры двигателей. На практике используют приближенное выражение вида
 , (6.3)
, (6.3)
где sкр — критическое скольжение, при котором момент имеет максимальное значение.
В основу данного выражения положено допущение, что активное сопротивление обмотки статора равно нулю, а критическое скольжение
определяется по формуле
 . (6.4)
. (6.4)
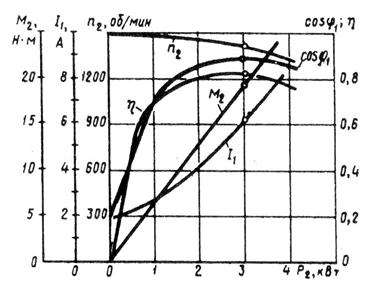
Рабочие характеристики асинхронного двигателя представляют собой зависимости скорости вращения, кпд , полезного момента М2 на валу двигателя, коэффициента мощности cos 1 и тока статора I1 от полезной мощности Р2 при U1=const и 1=const. Их определяют экспериментально или путем расчета по схемам замещения. Рабочие характеристики строят только для зоны устойчивой работы двигателя, т.е. до скольжения (1,11,2)sном. Примерный вид характеристик в отноительных единицах приведен на рис.6.4.
Механическая характеристика асинхронного двигателя
Механическая характеристика асинхронного двигателя это зависимость частоты вращения вала двигателя от момента на его валу n 2= f (M) или S = f (M). Механическая характеристика изображена на рис. 13. На характеристике можно выделить четыре характерные точки:
1 Точка идеального холостого хода. В ней М =0, S =0;
2 Точка номинального режима работы. В ней М=МН, S=SН. Значения n 2 Н и МН можно определить по каталожным данным двигателя;
3 Точка максимального или критического момента. В ней М=Мm, S=SK. Данная точка характеризует перегрузочную способность двигателя.
| Рис. 13 |
В каталогах для определения параметров данной точки приводится величина кратности критического момента двигателя:
Величина кратности позволяет определить максимально возможный момент двигателя.
4. Точка пуска. В ней М=МП, S =1. Данная точка характеризует пусковые свойства двигателя. В каталогах для определения пусковых свойств приводится величина кратности пускового момента двигателя:
В каталогах приводится также коэффициент кратности пускового тока
который позволяет определить величину тока двигателя в момент пуска.
Синхронные машины
Синхронные машины как двигатели применяются обычно в приводах большой мощности (более 600 кВт) или как микродвигатели, где требуется строгое постоянство скорости: электрочасы, самопишущие приборы и др. Наибольшее распространение получил генераторный режим работы синхронных машин, и почти вся электроэнергия вырабатывается синхронными генераторами, часто называемыми турбогенераторами. Синхронные генераторы на напряжение до 1000 В применяются в агрегатах для автономных систем электроснабжения. Агрегаты с этими генераторами могут быть стационарными и передвижными. Большинство агрегатов применяются с дизельными двигателями, но приводом их могут быть газовые турбины, электродвигатели и бензиновые двигатели.
Схема синхронной машины показана на рис. 14. Синхронная машина отличается от асинхронной тем, что ток в обмотке ротора появляется не при вращении ее в магнитном поле статора, а подводится к ней от постороннего источника постоянного тока. Статор синхронной машины выполнен так же, как и асинхронной, и на нем обычно расположена трехфазная обмотка. Обмотка ротора в синхронной машине создает магнитный поток возбуждения и называется обмоткой возбуждения. Вращающаяся обмотка ротора соединяется с внешней цепью источника постоянного тока с помощью контактных колец и щеток. Обмотка якоря в машине (генераторе) — это обмотка, в которой индуцируется ЭДС и к которой присоединяется нагрузка.
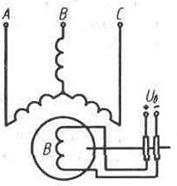
Рис. 14. Схема синхронной машины:
В — обмотка возбуждения, Uв — напряжение В цепи возбуждения
Результирующий магнитный поток создается совместным действием обмоток возбуждения и статора и вращается с той же частотой, что и ротор, поэтому такие машины называются синхронными.
В схеме на рис. 14 статор является якорем, а ротор — индуктором (возбудителем), но может быть и обращенная схема, в которой статор — индуктор, а ротор — якорь как у машины постоянного тока.
В машине с неподвижным якорем применяются две разновидности ротора: явнополюсный ротор имеет явно выраженные полюсы, неявнополюсный ротор не имеет явно выраженных полюсов.
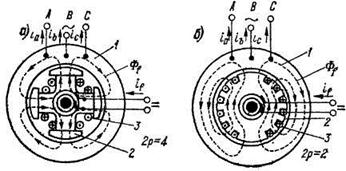
Рис. 15.Принцип устройства явнополюсной (а) и неявнополюсной (б) синхронной машины
/ — статор (якорь), 2 — ротор (индуктор), 3 — обмотка возбуждения
Постоянный ток в обмотку возбуждения синхронной машины может подаваться от специального генератора постоянного тока, установленного на валу машины и называемого возбудителем, или от сети через полупроводниковый выпрямитель.
При вращении ротора с частотой n2 его магнитное поле возбуждения наводит в статоре ЭДС E1, частота которой
Из формулы следует, что чем больше число пар полюсов синхронной машины p*, тем меньше должна быть ее скорость вращения п для получения заданной частоты fi.
Поэтому синхронные генераторы обычно выпускают явнополюсными с большим числом пар полюсов.
Синхронный двигатель несколько сложнее, чем асинхронный, кроме того, требуются два вида тока – переменный и постоянный. Такие двигатели обычно выпускаются большой мощности и имеют большие габариты. Синхронные двигатели имеют проблемы пуска, обусловленные введением ротора в синхронный режим при запуске двигателя. Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через автотрансформатор. При асинхронном пуске в момент включения (подключения обмоток статора к системе трехфазного тока) обмотки ротора не соединены с источником постоянного тока, а замкнуты накоротко. Двигатель при этом становится по принципу действия асинхронным. После разгона ротора его замкнутые обмотки размыкаются и подключаются к источнику постоянного тока.
Вместе с тем синхронный двигатель обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного.
1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии, который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности (cos фи) равным единице. Если для предприятия необходима выработка реактивной энергии, то синхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть.
2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя.
 4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
Механическая характеристика синхронного электродвигателя.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Основные характеристики асинхронных электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
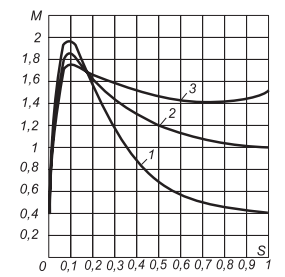
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин
Как называется основная характеристика асинхронного двигателя
Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
 Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I . К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
 Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
 Рис. 264. Рабочие характеристики асинхронного двигателя
Рис. 264. Рабочие характеристики асинхронного двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.
коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;
η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность , кВт,
N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:
N – двигатели с нормальный моментом;
Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
где Р-номинальная мощность двигателя, кВт;
р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
 Рабочие характеристики асинхронного двигателя (рис. 13.7) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Рабочие характеристики асинхронного двигателя (рис. 13.7) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя
Скольжение по (13.5) s = Pэ2/ Pэм, (13.24) т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу
Рис. 13.7. Рабочие характеристики асинхронного двигателя
двигателя отношение (13.24) растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2‘ угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2‘ возрастают электрические потери в роторе [см. (13.3)].
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Асинхронный конденсаторный двигатель имеет на статоре две обмотки, занимающие одинаковое число пазов и сдвинутые в пространстве относительно друг друга на 90 эл. град. Одну из обмоток — главную — включают непосредственно в однофазную сеть, а другую — вспомогательную — включают в эту же сеть, но через рабочий конденсатор Сра6 (рис. 16.7, а).
 В отличие от рассмотренного ранее однофазного асинхронного двигателя в конденсаторном двигателе вспомогательная обмотка после пуска не отключается и остается включенной в течение всего периода работы, при этом емкость Сраб создает фазовый сдвиг между токами и .
В отличие от рассмотренного ранее однофазного асинхронного двигателя в конденсаторном двигателе вспомогательная обмотка после пуска не отключается и остается включенной в течение всего периода работы, при этом емкость Сраб создает фазовый сдвиг между токами и .
Рис. 16.7. Конденсаторный двигатель:
а— с рабочей емкостью, б — с рабочей и пусковой емкостями, в — механические характеристики; 1— при рабочей емкости, 2— при рабочей и пусковой емкостях
эффективных чисел витков вспомогательной и главной обмоток; kAи kB— обмоточные коэффициенты обмоток статора.
Анализ (16.4) показывает, что при заданных коэффициенте трансформации kи отношении напряжений UA/ UBемкость Сра6 обеспечивает получение кругового вращающегося поля лишь при одном, вполне определенном режиме работы двигателя. Если же и изменится режим (нагрузка), то изменятся и ток IAи фазовый угол φA, а следовательно, и Сраб, соответствующая круговому полю. Таким образом, если нагрузка двигателя отличается от расчетной, то вращающееся поле двигателя становится эллиптическим и рабочие свойства двигателя ухудшаются. Обычно расчет Сраб ведут для номинальной нагрузки или близкой к ней.
Обладая сравнительно высокими КПД и коэффициентом мощности (соs φ1 = 0,80 ÷ 0,95), конденсаторные двигатели имеют неудовлетворительные пусковые свойства, так как емкость Сраб обеспечивает круговое поле лишь при расчетной нагрузке, а при пуске двигателя поле статора эллиптическое. При этом пусковой момент обычно не превышает 0,5МНОМ.
Для повышения пускового момента параллельно емкости Сраб включают емкость Спуск, называемую пусковой(рис. 16.7, б). Величину Спуск выбирают, исходя из условия получения кругового поля статора при пуске двигателя, т. е. получения наибольшего пускового момента. По окончании пуска емкость Спуск следует отключать, так как при небольших скольжениях в цепи обмотки статора, содержащей емкость Си индуктивность L, возможен резонанс напряжений, из-за чего напряжение на обмотке и на конденсаторе может в два-три раза превысить напряжение сети.
При выборе типа конденсатора следует помнить, что его рабочее напряжение определяется амплитудным значением синусоидального напряжения, приложенного к конденсатору Uc. При круговом вращающемся поле это напряжение (В) превышает напряжение сети U1и определяется выражением

Рис 16.8. Схемы включения двухфазного двигателя в трехфазную сеть
Конденсаторные двигатели иногда называют двухфазными, так как обмотка статора этого двигателя содержит две фазы. Двухфазные двигатели могут работать и без конденсатора или другого ФЭ, если к фазам обмотки статора подвести двухфазную систему напряжений (два напряжения, одинаковые по значению и частоте, но сдвинутые по фазе относительно друг друга на 90°). Для получения двухфазной системы напряжений можно воспользоваться трехфазной линией с нулевым проводом, включив обмотки статора так, как показано на рис. 16.8, а: одну обмотку — на линейное напряжение UAB,а другую — на фазное напряжение Uc через автотрансформатор AT (для выравнивания значения напряжений на фазных обмотках двигателя). Возможно включение двигателя и без нулевого провода (рис. 16.8, б), но в этом случае напряжения на обмотках двигателя будут сдвинуты по фазе на 120°, что приведет к некоторому ухудшению рабочих свойств двигателя.
10. . Синхронные машины. Конструкция и принцип действия СМ. СГ, работа на симметричную нагрузку. Реакция якоря при активной, индуктивной и емкостной нагрузке. Основные уравнения электрического равновесия и векторные диаграммы. Основные характеристики СГ, работающего на симметричную нагрузку. Отношение КЗ.
Устройство и принцип действия синхронной машины
По своей конструкции синхронные машины подразделяются на явнополюсные и неявнополюсные (рис.3.2).
Статор синхронной машины имеет такое же устройство, как и статор асинхронной машины и называется якорем. Трехфазная обмотка якоря синхронной машины выполняется с таким же числом полюсов, как и ротор. На рис.3.2 условно показаны только клеммы начал фаз А, В, С обмотки якоря.
Рис. 3.2
1 — статор (якорь); 2 — ротор (индуктор); 3 — обмотка возбуждения
Ротор синхронной машины имеет обмотку возбуждения, подключенную через два контактных кольца и щетки к источнику постоянного тока. Назначение обмотки возбуждения — создание в машине основного магнитного потока. Ротор вместе с обмоткой возбуждения называется индуктором.
Если ротор синхронной машины привести во вращение с частотой вращения n и возбудить его, то поток возбуждения будет индуктировать в обмотке якоря ЭДС с частотой .
Явнополюсная машина. На рис. 3.3,а изображено магнитное поле обмотки возбуждения в воздушном зазоре явнополюсной синхронной машины на протяжении полюсного деления t. Распределение магнитной индукции поля обмотки возбуждения на внутренней поверхности якоря представлено на рис. 3.3,б. Реальное распределение (1) магнитной индукции , вследствие несинусоидальности, можно разложить на основную (2) и высшие гармонические составляющие.

Рис.3.4 Рис. 3.3
Выше названные гармоники поля обмотки возбуждения индуктируют в обмотке якоря основную и высшие гармоники ЭДС. Высшие гармоники ЭДС малы, так как малы соответствующие им гармоники магнитной индукции поля обмотки возбуждения, а также и из-за укорочения шага обмотки якоря и ее распределения.
Амплитуда основной гармоники поля равна
,
где — амплитуда реального распределения индукции поля обмотки возбуждения; — коэффициент формы поля обмотки возбуждения; — минимальный воздушный зазор; — максимальный воздушный зазор; — длина дуги полюсного наконечника;a — коэффициент полюсной дуги; — магнитная проницаемость воздуха; — коэффициент воздушного зазора; — коэффициент насыщения магнитной цепи по продольной оси (продольная ось d совпадает с продольной осью симметрии каждого полюса индуктора, поперечная ось q посередине между соседними главными полюсами); — магнитодвижущая сила (МДС) полюса обмотки возбуждения; wf, if — число витков и ток обмотки возбуждения.
Обычно , , что позволяет обеспечить высокие значения коэффициента формы поля обмотки возбуждения
Неявнополюсная машина. На рис.3.4,а изображено магнитное поле обмотки возбуждения в воздушном зазоре неявнополюсной синхронной машины на протяжении полюсного деления t. Распределение магнитной индукции поля обмотки возбуждения на внутренней поверхности якоря представлено на рис.3.4,б. Реальное распределение (1) магнитной индукции имеет вид трапеции, которое можно разложить на основную (2) и высшие гармонические составляющие.
Амплитуда основной гармоники поля обмотки возбуждения
, где — коэффициент формы поля обмотки возбуждения; — обмоточный коэффициент обмотки возбуждения; y — отношение числа пазов обмотки возбуждения к полному числу пазовых делений наружной поверхности индуктора. Обычно , что позволяет получить
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студентов недели бывают четные, нечетные и зачетные. 9486 — | 7456 — или читать все.