Как переделать шаговый двигатель в обычный + видео обзор
Во-первых, все эти приборы имеют в своём составе блок питания, как правило — импульсный, на несколько напряжений. В основном это выходы с постоянными напряжениями +5, +12 и +24 … 36 вольт с токами до 2 … 3 ампер. Такие блоки питания можно использовать, например, для зарядных устройств, питания светодиодных лент или электроинструмента небольшой мощности. Но в данной статье будут даны примеры использования шаговых двигателей из подобных аппаратов.
Для питания и управления шаговым двигателем, конечно, требуется специальная схема-драйвер, это обеспечит его полную функциональность. Но если вам нужен «просто двигатель» без управления частотой вращения и шагом поворота вала, то вполне можно обойтись простейшей схемой питания с применением конденсатора:
— эта схема предполагает использование двигателей с двумя обмотками и отводами от их середины (всего 6 проводов). Обмотка 1 имеет выводы красного и белого цвета, обмотка 2 — синего и жёлтого. Средние выводы (коричневого цвета) здесь не используются. В зависимости от напряжения питания и мощности двигателя может потребоваться подбор элементов С* и R*.
При использовании такой схемы нельзя будет менять частоту (скорость) вращения, но можно менять его направление — при помощи переключателя S1. Вместо трансформатора и выпрямительного моста в схеме можно использовать как раз «родной» блок питания, который стоял в аппаратуре, где использовался этот двигатель.
Другой вариант использования шагового двигателя — в качестве генератора. При вращении вала такого двигателя на его обмотках наводится напряжение, которое можно использовать, например, для питания низковольтной лампы или светодиодов. В интернете можно найти множество схем-вариантов автономных фонариков с использованием шагового двигателя в качестве генератора энергии. Ниже приводятся их простейшие примеры :
Для увеличения мощности такого фонарика можно использовать все имеющиеся в нём обмотки, используя суммирование их мощностей на выходе (параллельное включение):
В статье приведён минимум необходимой информации и простейшие примеры. Более сложные схемы включения с реализацией всех возможностей шаговых двигателей ( с возможностью полноценного управления) можно найти на специализированных сайтах в интернете или справочной литературе.
Благодарю за уделённое время.
Прошу поставить «палец-вверх», если статья была полезна
Мой самодельный ветрогенератор на шаговом двигателе
Проезжая на велосипеде мимо дачных участков, я увидел работающий ветрогенератор:
Большие лопасти медленно, но верно вращались, флюгер ориентировал устройство по направлению ветра.
Мне захотелось реализовать подобную конструкцию, пусть и не способную вырабатывать мощность, достаточную для обеспечения «серьезных»  потребителей, но все-таки работающую и, например, заряжающую аккумуляторы или питающую светодиоды.
потребителей, но все-таки работающую и, например, заряжающую аккумуляторы или питающую светодиоды.


Шаговые двигатели
Одним из наиболее эффективных вариантов небольшого самодельного ветроэлектрогенератора является использование шагового двигателя (ШД) (англ. stepping (stepper, step) motor) — в таком моторе вращение вала состоит из небольших шагов. Обмотки шагового двигателя объединены в фазы. При подаче тока в одну из фаз происходит перемещение вала на один шаг.
Эти двигатели являются низкооборотными и генератор с таким двигателем может быть без редуктора подключен к ветряной турбине, двигателю Стирлинга или другому низкооборотному источнику мощности. При использовании в качестве генератора обычного (коллекторного) двигателя постоянного тока для достижения таких же результатов потребовалась бы в 10-15 раз более высокая частота вращения.
Особенностью шаговика является достаточно высокий момент трогания (даже без подключенной к генератору электрической нагрузки), достигающий 40 грамм силы на сантиметр.
Коэффициент полезного действия генератора с ШД достигает 40 %.
Для проверки работоспособности шагового двигателя можно подключить, например, красный светодиод. Вращая вал двигателя, можно наблюдать свечение светодиода. Полярность подключения светодиода не имеет значения, так как двигатель вырабатывает переменный ток.
Кладезем таких достаточно мощных двигателей являются пятидюймовые дисководы гибких дисков, а также старые принтеры и сканеры.
Например, я располагаю ШД из старого 5.25″ дисковода, работавшего еще в составе ZX Spectrum — совместимого компьютера «Байт».
Такой дисковод содержит две обмотки, от концов и середины которых сделаны выводы — итого из двигателя выведено шесть проводов: 
первая обмотка (англ. coil 1) — синий (англ. blue) и желтый (англ. yellow);
вторая обмотка (англ. coil 2) — красный (англ. red) и белый (англ. white);
коричневые (англ. brown) провода — выводы от средних точек каждой обмотки (англ. center taps).
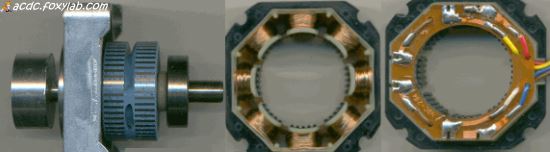
разобранный шаговый мотор
Слева виден ротор двигателя, на котором видны «полосатые» магнитные полюсы — северный и южный. Правее видна обмотка статора, состоящая из восьми катушек.
Сопротивление половины обмотки составляет
Я использовал этот двигатель в первоначальной конструкции моего ветрогенератора.
Находящийся в моем распоряжении менее мощный шаговый двигатель T1319635 фирмы Epoch Electronics Corp. из сканера HP Scanjet 2400 имеет пять выводов (униполярный мотор): 
первая обмотка (англ. coil 1) — оранжевый (англ. orange) и черный (англ. black);
вторая обмотка (англ. coil 2) — коричневый (англ. brown) и желтый (англ. yellow);
красный (англ. red) провод — соединенные вместе выводы от средней точки каждой обмотки (англ. center taps).
Сопротивление половины обмотки составляет 58 Ом, которое указано на корпусе двигателя.
В улучшенном варианте ветрогенератора я использовал шаговый двигатель Robotron SPA 42/100-558, произведенный в ГДР и рассчитанный на напряжение 12 В:
Ветротурбина
Возможны два варианта расположения оси крыльчатки (турбины) ветрогенератора — горизонтальное и вертикальное.
Преимуществом горизонтального (наиболее популярного) расположения оси, располагающейся по направлению ветра, является более эффективное использование энергии ветра, недостаток — усложнение конструкции.
Я выбрал вертикальное расположение оси — VAWT (vertical axis wind turbine), что существенно упрощает конструкцию и не требует ориентации по ветру. Такой вариант более пригоден для монтирования на крышу, он намного эффективнее в условиях быстрого и частого изменения направления ветра.
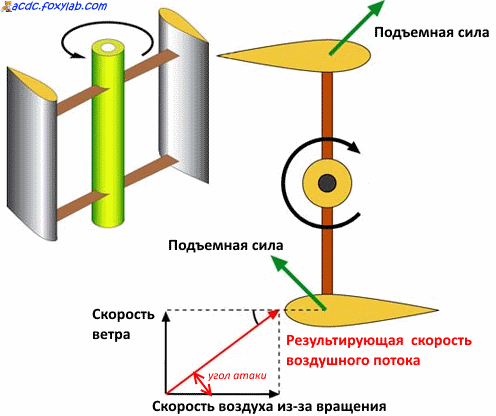
Я использовал тип ветротурбины, называемый ветротурбина Савониуса (англ. Savonius wind turbine). Она была изобретена в 1922 году Сигурдом Йоханнесом Савониусом (Sigurd Johannes Savonius) из Финляндии.
Сигурд Йоханнес Савониус


Работа ветротурбины Савониуса основана на том, что сопротивление (англ. drag) набегающему потоку воздуха — ветру вогнутой поверхности цилиндра (лопасти) больше, чем выпуклой.
Такая ветротурбина вращается в одну и ту же сторону, независимо от направления ветра: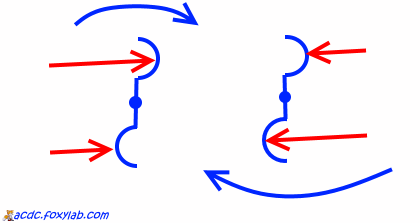
Подобный принцип работы используется в чашечном анемометре (англ. cup anemometer) — приборе для измерения скорости ветра: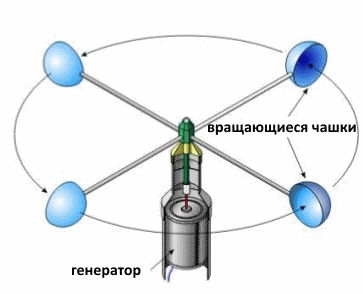
Такой анемометр был изобретен в 1846 году ирландским астрономом Джоном Томасом Ромни Робинсоном (John Thomas Romney Robinson):
Робинсон полагал, что чашки в его четырехчашечном анемометре перемещаются со скоростью, равной одной трети скорости ветра. В реальности это значение колеблется от двух до немногим более трех.
В настоящее время для измерения скорости ветра используются трехчашечные анемометры, разработанные канадским метеорологом Джоном Паттерсоном (John Patterson) в 1926 году:
Скорость вращения ветротурбины Савониуса не может превышать скорость ветра, но при этом такая конструкция характеризуется высоким крутящим моментом (англ. torque).
Первоначально в крыльчатке моего генератора использованы четыре лопасти в виде сегментов (половинок) цилиндров, вырезанных из пластиковых труб: 
Размеры сегментов —
длина сегмента — 14 см;
высота сегмента — 2 см;
длина хорды сегмента — 4 см;
расстояние от начала сегмента до центра оси вращения — 3 см.
Я установил собранную конструкцию на достаточно высокой (6 м 70 см) деревянной мачте из бруса, прикрепленную саморезами к металлическому каркасу:
Недостатком генератора была достаточно высокая скорость ветра, требуемая для раскрутки лопастей. Для увеличения площади поверхности я использовал лопасти, вырезанные из пластиковых бутылок: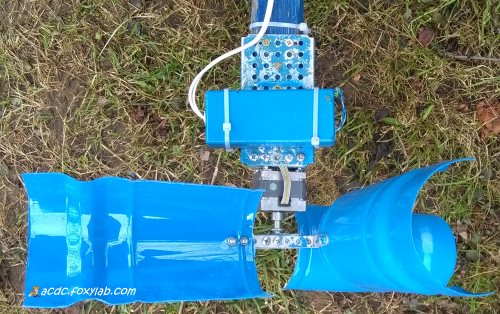
Размеры сегментов —
длина сегмента — 18 см;
высота сегмента — 5 см;
длина хорды сегмента — 7 см;
расстояние от начала сегмента до центра оси вращения — 3 см.
Опытная эксплуатация нового варианта ветрогенератора показала его надежность даже при сильных порывах ветра.
Недостатком турбины Савониуса является невысокая эффективность — только около 15 % энергии ветра преобразуется в энергию вращения вала (это намного меньше, чем может быть достигнуто с ветротурбиной Дарье (англ. Darrieus wind turbine)), использующей подъемную силу (англ. lift). Этот вид ветротурбины был изобретен французским авиаконструктором Жоржем Дарье (Georges Jean Marie Darrieus) — патент США от 1931 года № 1,835,018. 
Жорж Дарье
Недостатком турбины Дарье является то, что у нее очень плохой самозапуск (для выработки крутящего момента от ветра турбины уже должна быть раскручена).
Преобразование электроэнергии, вырабатываемой шаговым двигателем
Выводы шагового двигателя могут быть подключены к двум мостовым выпрямителям, собранным из диодов Шоттки для снижения падения напряжения на диодах.
Можно применить популярные диоды Шоттки 1N5817 с максимальным обратным напряжением 20 В, 1N5819 — 40 В и максимальным прямым средним выпрямленным током 1 А. Я соединил выходы выпрямителей последовательно с целью увеличения выходного напряжения.
Также можно использовать два выпрямителя со средней точкой. Такой выпрямитель требует в два раза меньше диодов, но при этом и выходное напряжение снижается в два раза.
Затем пульсирующее напряжение сглаживается с помощью емкостного фильтра — конденсатора 1000 мкФ на 25 В. Для защиты от повышенного генерируемого напряжения параллельно конденсатору включен стабилитрон на 25 В.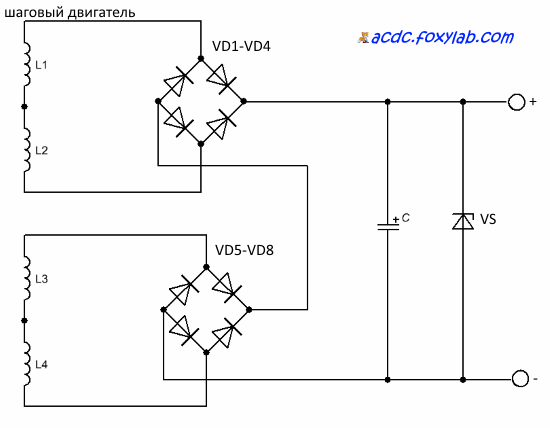
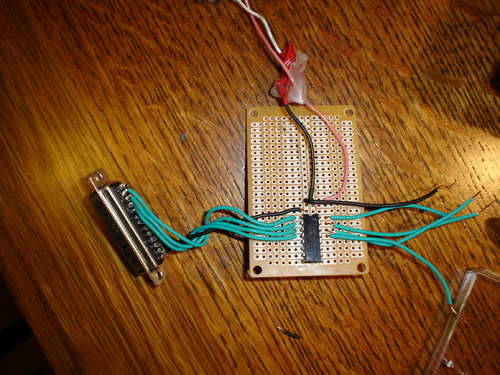
схема моего ветрогенератора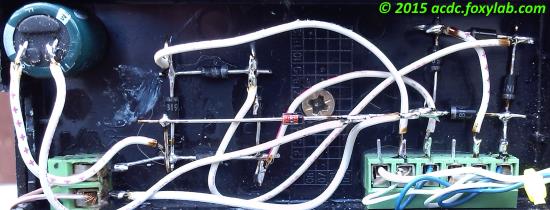
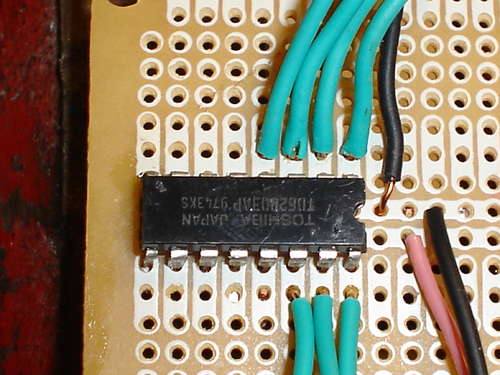
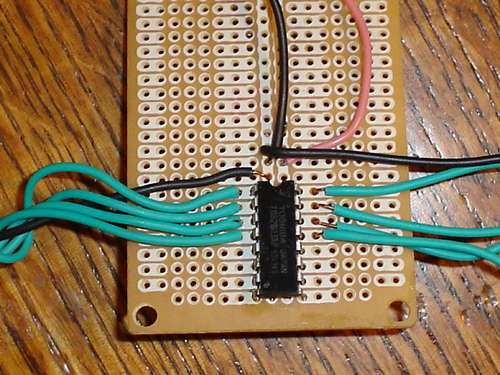
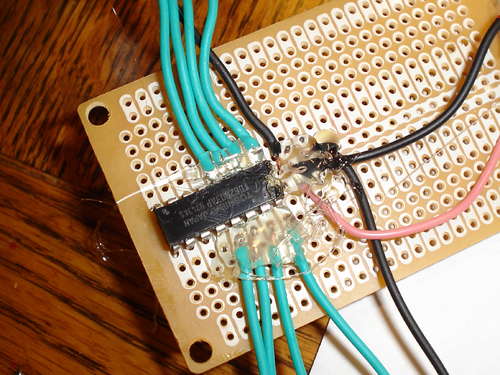
электронный блок моего ветрогенератора
Применение ветрогенератора
Вырабатываемое ветрогенератором напряжение зависит от величины и постоянства скорости ветра.
ПОДКЛЮЧЕНИЕ К JOULE THIEF
Сглаженное напряжение с конденсатора ветрогенератора может подаваться на Joule Thief — низковольтный DC-DC преобразователь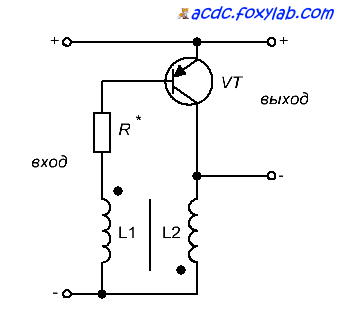
Значение сопротивления резистора R подбирается экспериментально (в зависимости от типа транзистора) — целесообразно использовать переменный резистор на 4,7 кОм и постепенно уменьшать его сопротивление, добиваясь стабильной работы преобразователя.
Я собрал такой преобразователь на базе германиевого pnp-транзистора ГТ308В (VT) и импульсного трансформатора МИТ-4В (катушка L1 — выводы 2-3, L2 — выводы 5-6) :
ЗАРЯД ИОНИСТОРОВ (СУПЕРКОНДЕНСАТОРОВ)
Ионистор (суперконденсатор, англ. supercapacitor) представляет собой гибрид конденсатора и химического источника тока.
Ионистор — неполярный элемент, но один из выводов может быть помечен «стрелкой» — для обозначения полярности остаточного напряжения после его зарядки на заводе-изготовителе.
Для первоначальных исследований я использовал ионистор 5R5D11F22H емкостью 0,22 Ф на напряжение 5,5 В (диаметр 11,5 мм, высота 3,5 мм): 
Я подключил его через диод к выходу Joule Thief через германиевый диод Д310.
Для ограничения максимального напряжения зарядки ионистора можно использовать стабилитрон или цепочку светодиодов — я использую цепочку из двух красных светодиодов: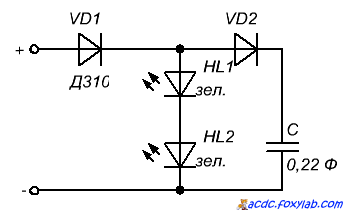
Как сделать из шагового двигателя обычный
Возможно ли из шагового двигателя сделать обычный дпт?
или как его заставить быстро вращаться без контроллера?
Задай правильную частоту всем обмоткам. Можно сделать не только асинхронный, но и если понять принцип понять как сделать другой двигатель. RsDeA
Без коммутатора не как, даже если обмотки соединишь как нужно.
коротко — никак. Ему нужно обмотки последовательно переключать. И желательно с обратной связью.
Теоретически можно запитать переменным током и повесить задержку на пол периода на чётные обмотки. Но это, блин, считать надо по конкретный движок, под параметры питания
Быстро вращаться никак не получится. Частота вращения ограничена переходными процессами в обмотках. При определённой частоте непрерывное вращение становится невозможным. На тех двигателях, что я запускал в студенчестве, всё упиралось в частоту переключения в 200-400 Гц.
Можно — если дополнить двигатель каким-либо датчиком положения ротора или любой схемой, получающей эти сведения косвенным путем. Например, несложная петля обратной связи, применяемая в электромеханических часовых механизмах. Но от шагового двигателя нельзя ожидать очень уж высоких оборотов, слишком много у него полюсов, потребуются такие частоты переключения обмоток, что их собственная индуктивность послужит тормозом.
Простой в изготовлении контроллер шагового двигателя из старых деталей
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
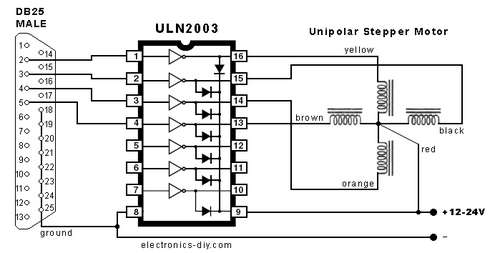
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

Шаг 4.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный — к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 — с выводом 3 ULN2003 и вывод 5 — с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.


Шаг 5.
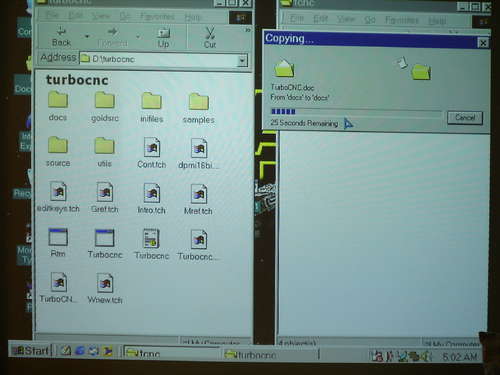
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством — это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку "tcnc". Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
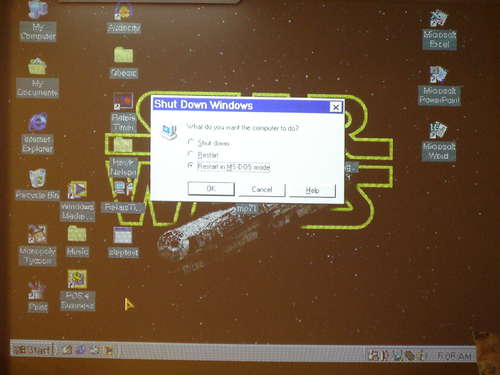
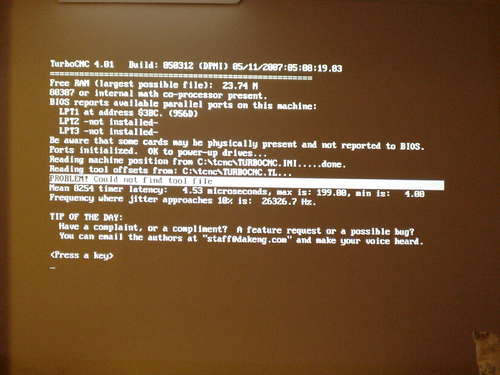
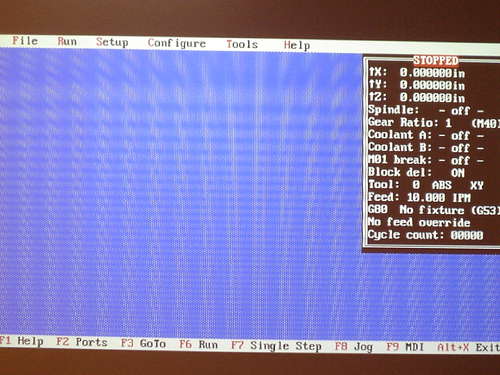
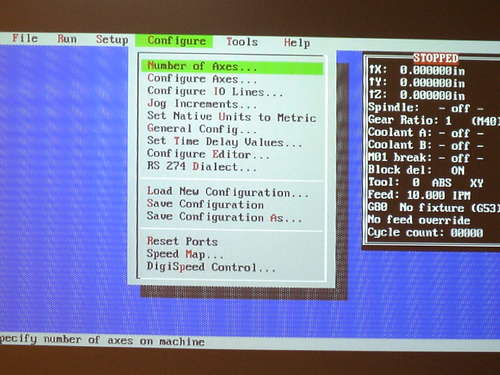
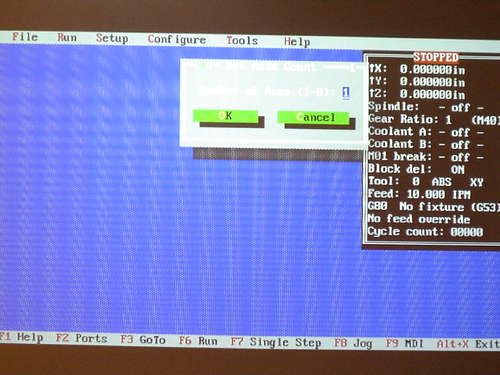
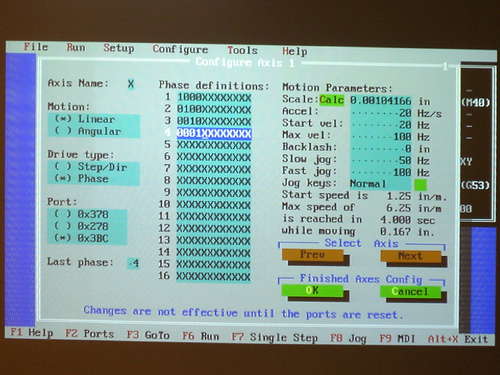
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите "C: cncTURBOCNC". Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно "A: cncTURBOCNC". Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню "Configure". При помощи клавиш со стрелками выберите "number of axis". Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем "1". Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню "Configure" выберите пункт "Configure axes", затем дважды нажмите Enter.
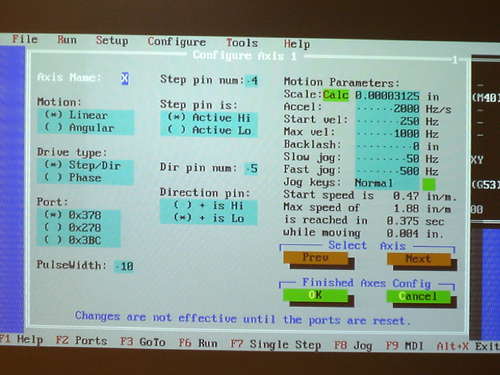
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке "Drive Type". При помощи стрелки вниз выберите пункт "Phase". Снова при помощи Tab выберите ячейку "Scale". Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
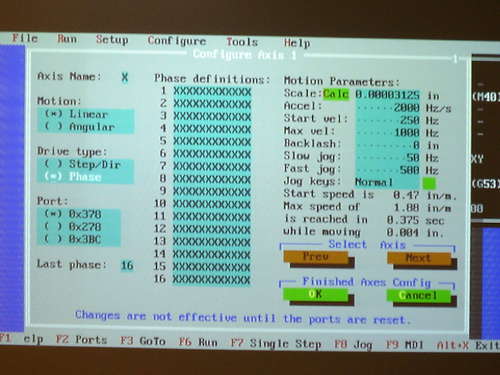
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную — 175. Нажимайте Tab пока не дойдете до пункта "Last Phase". Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.

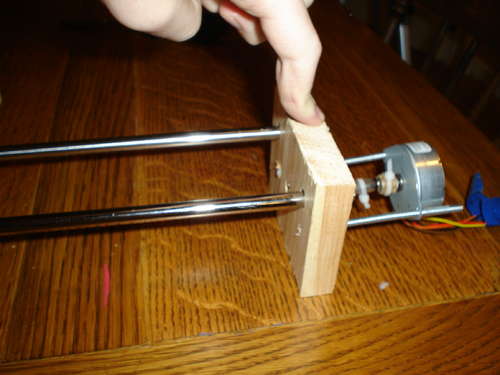
Шаг 7.
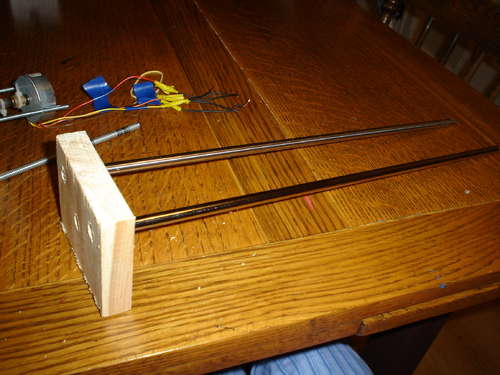
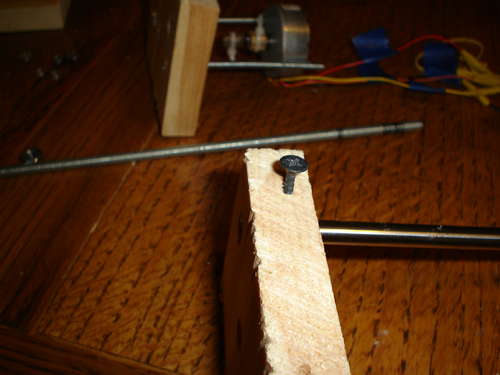
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
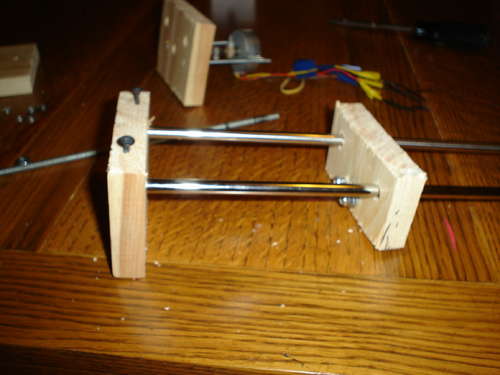
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.





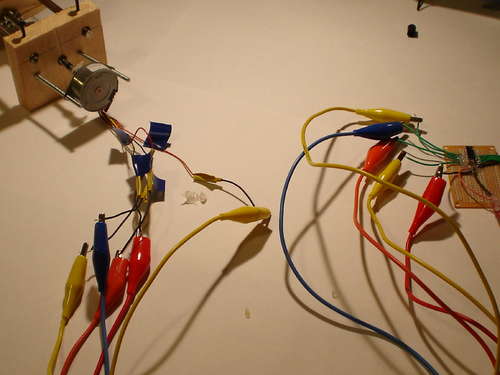
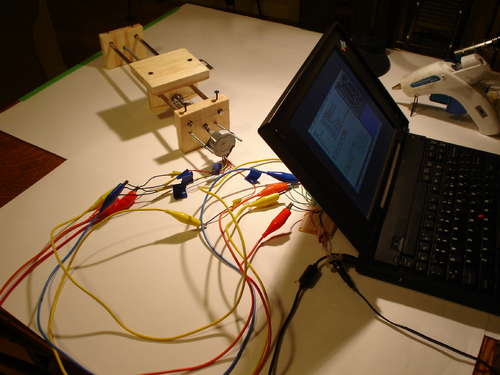
Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
Часть 1
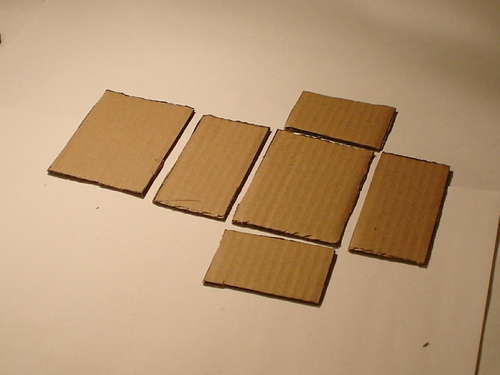
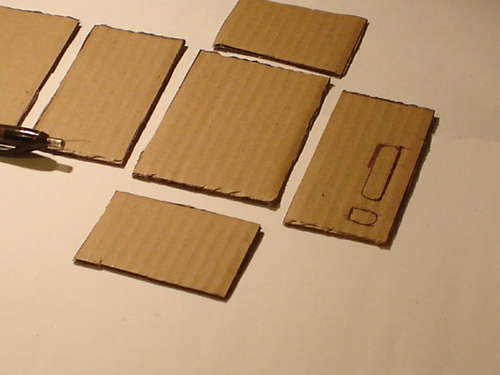
Изготовление корпуса — это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.










Шаг 10.
Изготовление корпуса
Часть 2
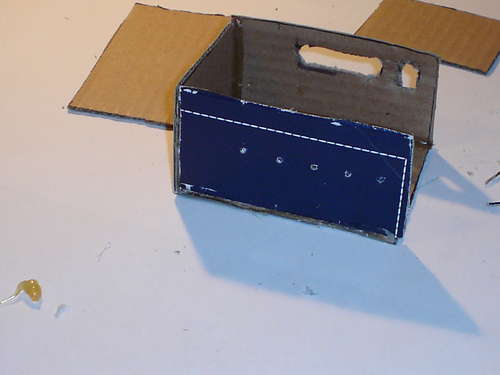
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: — ЧПУ устройство — плоттер — или любую другую вещь, которой нужно точное управление движением. — добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле "number of axis" введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
"XXXX1000XXXX
XXXX0100XXXX
XXXX0010XXXX
XXXX0001XXXX"
Для третьей оси в строках первых четырех фаз введите:
"XXXXXXXX1000
XXXXXXXX0100
XXXXXXXX0010
XXXXXXXX0001"
Шаговые двигатели (подробный разбор 4 типов)
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Надежный мини-ветрогенератор: изготовление ветряка своими руками из старого компьютерного кулера



Размеры ветрогенератора необязательно должны поражать воображение своей грандиозностью. Вырабатывать ток способна и небольшая установка, созданная из мелких подручных деталей или устройств. Она может стать учебным пособием для детей, источником освещения для аварийных ситуаций, зарядником для батареи мобильного телефона и т.д.
Стоимость небольших ветрогенераторов мощностью 750 Вт составляет от 35000 руб только за ветряк и от 115000 за полный комплект. При этом, такое устройство не сможет обеспечить энергией весь дом, что делает приобретение подобной конструкции сомнительным с точки зрения рациональности. Другое дело, если ветряк собран самостоятельно.
Расходы снижаются в десятки раз, эффективность получается такой, какую заложили при создании проекта. В качестве пробной модели, позволяющей отработать технологию и получить некоторый опыт в создании подобных устройств, может стать мини-ветрогенератор. Для изготовления можно использовать различные мелкие моторчики от вышедшего из строя или устаревшего оборудования.








Принципы использования
Характерная для российского климата турбулентность ветра в приземных слоях приводит к постоянным изменениям его направления и интенсивности. Ветрогенераторы больших размеров, мощность которых превышает 1 Квт будут инерционными. В результате они не успеют полностью раскрутиться при смене направления ветра. Этому также мешает момент инерции в плоскости вращения. Когда боковой ветер действует на работающий ветряк, он испытывает огромные нагрузки, которые могут привести к его быстрому выходу из строя.
Целесообразно применять ветрогенератор малой мощности, изготовленный своими руками, имеющий незначительную инерционность. С их помощью можно заряжать маломощные аккумуляторы мобильных телефонов или использовать для освещения дачи светодиодами.
В дальнейшем лучше ориентироваться на потребителей, нетребующих преобразования вырабатываемой энергии, например, для подогрева воды. Нескольких десятков ватт энергии вполне может хватить для поддерживания температуры горячей воды или для дополнительного подогрева системы отопления, чтобы она не перемерзала зимой.
Используем старый компьютерный кулер
Для изготовления ветряка нужен большой кулер, он выдает лучшие результаты и удобен в работе. Прежде всего, надо его разобрать. Снимается наклейка, удаляется заглушка и стопорное кольцо. После этого кулер легко разбирается по оси вращения на две примерно одинаковые по размерам половины.
Одна из них — ротор, лопасти которого придется изменить на более крупные. Для этого аккуратно обламываются или отрезаются старые лопасти, из пластиковой бутылки делаются новые, длиной примерно раза в 4 больше прежних. Удобнее всего сделать три штуки, они будут иметь достаточную площадь основания для прочного приклеивания.
На статоре имеются четыре обмотки. Их можно оставить в неприкосновенности, или изменить число витков. Берется более тонкий провод и наматывается на все катушки по очереди, причем, в разном направлении. Катушки соединяются соответствующим образом.
После этого необходимо изготовить выпрямитель, для чего понадобятся четыре диода. Они парами соединяются последовательно, затем параллельно. Присоединяются провода, устройство готово. Для установки его на ветер понадобится подставка или небольшая мачта, которую проще всего изготовить из обрезка металлической трубки. Для того, чтобы ветряк самостоятельно наводился на ветер, понадобится хвостовой стабилизатор, наподобие самолетного хвоста.
Для проверки работоспособности присоединяется тестер или светодиодный фонарик.



Станок для сверления печатных плат из каретки принтера

У меня был МФУ Эпсон, умер в нём сканер (полетела матрица) и ремонт оказался слишком дорог. Из-за матрицы весь девайс не выходит в режим готовности и соответственно принтером тоже пользоваться невозможно. Ну, поматерился, всплакнул, купил лазерник. Заодно и ЛУТ для плат начал осваивать. А МФУ выкинуть жалко было, и спустя полгода нашёл я ему применение: сделал из него станок для сверления плат. Ниже найдёте видеоролик, на котором этот станок в работе. Очень много сайтов перерыл, кучу всего перепробовал, но это решение придумал сам. Во всех ручных сверлилках мне очень не нравилось, что дырочки при сверлении не идеально вертикальны, они имеют угол наклона. Со стороны дорожек мы вроде ровно тыкали сверлом, а вот переворачивая плату, видим, что дырочки под микросхему в корпусе, к примеру, DIP28 совсем не под линеечку. Да и свёрла часто ломаются. Поэтому, разбираем свой принтер, оставляем только каретку с родным ремнём и двигателем.

Так же оставляете родной блок питания.

Он будет у нас питать двигатель дрели и двигатель каретки, которая будет поднимать и опускать ту самую дрель. Дрель делается из двигателя, который в принтере протягивал бумагу. Он очень мощный, хоть и не большой. Всё что осталось от принтера ставим вертикально

и в каретку вместо картриджа устанавливаем двигатель, который был снят с подачи бумаги, а также одеваем на двигатель цанговый патрон для свёрл.

Далее нам необходимо управление. Берём две кнопки двухсекционных, как на картинке и спаиваем их опять же, как я нарисовал.

Делаем длинные провода, так чтобы до пола со стола доставали. Кнопки превращаем в педали управления! Подпаиваем концы к блоку питания и двигателю, таким образом, что одна педаль вращает двигатель в одну сторону, поднимая каретку, а вторая — в другую сторону и опускает каретку. Почесав затылок, можно добавить выключатель блока питания, который можно закрепить на корпусе принтера.

Если у вас имеется мастерская и в ней есть просторный верстак, то устройство можно закрепить намертво к столу, чтоб оно не шаталось.
Отлично, почти всё готово! А ещё было бы здорово, если бы двигатель со сверлом включался сам, да ещё и в нужный нам момент. Из этого же принтера извлёк концевой выключатель, который закрепил внизу траектории каретки.

Когда каретка с двигателем опускается к плате, доходя до определённого уровня, она давит на концевик и включает двигатель дрели.

Работать со станком очень просто. Кладёте приготовленную плату и с помощью педалей, поднимая и опуская каретку, сверлите плату. Могу сказать — это доходит до автоматизма, смотрите видео, на котором я сверлил отверстия на плате под импульсный блок питания.
Как видите — станок работает, как заводской. Иногда очень удобно опускать станок не педалью, а рукой, слегка придавливая, а поднимать педалью. Если двигатель поднимает каретку с трудом, значит, он тяжеловат, либо у блока питания не хватает тока его крутнуть. Есть быстрое решение этой проблемы. Вверху, стоит ролик, и что-то типа неподвижного блока через который проходит ремень, ремень натянут пружиной, которую очень просто вручную ослабить немного, отогнув пластину.

После этого двигатель подъёма каретки вздохнёт с облегчением.
Для удобства можно добавить что-то наподобие прицела, чтоб независимо от положения каретки вы видели, куда опустится сверло. Это легко осуществляется установкой лазерной указки в нужное место, только питать её лучше пониженным напряжением, а то слишком ярко и бьёт по глазам пятно на плате.
Ещё одна отличная доработка такого станка — установка вентилятора от ПК, сдувающего пыль и стружку из рабочей зоны. Либо приспособить маленький китайский пылесос (он работает от батареек, переделать под питание от БП принтера не сложно).
Ну, вот и всё, удачных экспериментов! Будут вопросы — задавайте, с удовольствием отвечу, либо же идеи в плане доработки — всегда буду рад! С уважением, Александр.
Список всех статей
25 лет, с детства занимаюсь электроникой и всем что с ней связано. ремонт, разработка и сборка электроники, не основная работа, хобби(которому времени уделяю больше чем работе) основное направление электроники — звук. работаю звукорежиссёром, озвучиваю концерты по всей Украине
Устройство для зарядки автомобильной АКБ
Небольшой ветрогенератор, способный зарядить автомобильный аккумулятор — весьма практичное и нужное устройство. Необходимо обеспечить напряжение, не превышающее номинал АКБ (обычно 12 В), иначе появится риск перезаряда и закипания батареи.
В качестве генератора потребуется самодельное устройство соответствующей мощности или готовый асинхронный двигатель, тракторный или автомобильный генератор, способные создавать напряжение заряда. Для защиты от перезарядки потребуется контроллер на основе автомобильного реле-регулятора, отключающий заряд при появлении слишком высокого напряжения.








Электрическая часть
Генератором в ветряк можно устанавливать шаговый двигатель (ШД) для принтера.

Даже при небольшой скорости вращения он вырабатывает мощность около 3 Вт. Напряжение может подниматься выше 12 В, что дает возможность заряжать небольшой аккумулятор. Остальные генераторы эффективно работают при скорости вращения более 1000 об./мин, но они не подойдут, поскольку ветряк вращается со скоростью 200-300 об./мин. Здесь необходим редуктор, но он создает дополнительное сопротивление и к тому же имеет высокую стоимость.
В генераторном режиме у шагового двигателя вырабатывается переменный ток, который легко преобразовать в постоянный, используя пару диодных мостов и конденсаторы. Схему легко собрать своими руками.

Установив за мостами стабилизатор, получим постоянное выходное напряжение. Для визуального контроля можно еще подключить светодиод. Чтобы уменьшить потери напряжения для его выпрямления применяются диоды Шоттки.
В дальнейшем можно будет создать ветряк с более мощным ШД. Такой ветрогенератор будет обладать большим моментом трогания. Проблему можно устранить, отключая нагрузку во время пуска и при малых оборотах.


![]()
![]()
Походный ветрогенератор
Иметь походный ветряк, позволяющий получить максимальный комфорт от пребывания на природе, удобно и полезно для каждого любителя путешествий. Требования к такому ветряку очевидны:
- компактность
- возможность быстрой сборки или разборки для транспортировки
- мощность, обеспечивающая электроэнергией необходимые устройства
Понадобится изготовить крыльчатку с отсоединяющимися лопастями и генератор, выдающий достаточную мощность. Оптимальный вариант — горизонтальный тип, с лопастями на винтах. Генератор лучше всего приспособить от автомобиля, он нуждается в небольшой модернизации (перемотка катушек) и установке магнитов на ротор (используются неодимовые магниты для возбуждения обмоток).
На природе достаточно закрепить устройство на стволе дерева или иной подходящей опоре и навести на ветер. Для компактности можно не делать устройство вращения вокруг вертикальной оси и регулировать положение вручную.










Что понадобится для сборки ветрогенератора?
Для того чтобы собрать ветрогенератор из шагового двигателя, понадобятся следующие детали:
- собственно мотор;
- листовой металл;
- алюминиевая трубка;
- фланец (1/4″);
- квадратная труба;
- диск от пилы;
- штифт;
- хомуты (можно использовать от автомобиля);
- трубы ПВХ разных размеров (например, 8×4, 30×8);
- шайбы, болты и прочее для крепления деталей;
- диоды.
Из инструментов пригодятся ножовка, разводной и газовый ключ, наждачка, рулетка, дрель, транспортир и рулетка.
Ветряк из шагового двигателя от принтера
Шаговые двигатели способны выдавать 12 и более вольт, но сила тока у них мала. Конструкция не позволяет усиливать их обмотки, поэтому используются как есть. На вал устанавливаются лопасти соответствующего размера, сделанные из полипропиленовых канализационных труб. Потребуется собрать простейший выпрямитель. Обычные шаговые двигатели в теории способны за пару дней зарядить аккумулятор мобильного телефона, но на практике этого добиться очень сложно возможно использование для подсветки с помощью светодиодных фонариков.
Вентильный двигатель

Модератор: Administrator. Послать Тему Печать. Прочитано раз. Сообщений: где-то в России
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока.
Другие возможные варианты
Для изготовления мини-ветрогенератора можно использовать любые электродвигатели от бытовых приборов. Можно приспособить двигатель от лентопротяжного механизма, от старой микроволновки (вентилятор), разные варианты щеточных конструкций. Все они имеют малую мощность и не смогут обеспечить сколько-нибудь серьезные устройства, но как пробные модели, созданные вместе с детьми и дающие опыт и понимание процесса, все эти варианты вполне подойдут.
На базе полученных знаний и навыком может быть создан более производительный ветрогенератор, способный обеспечивать потребности частного дома, перевести его в автономный режим электропитания.
Создание самодельного станка
Прежде, чем переделать принтеры или сканеры в мини станки, которые смогут выполнять фрезерные работы, следует максимально точно собрать раму конструкции и ее основные составляющие.

На верхнюю крышку устройства требуется установить главные оси, которые являются важными компонентами среди всех профессиональных станков. Осей должно быть всего три, начало работы необходимо производить с крепления оси у. Для того чтобы создать направляющую используют мебельный полоз.
Как использовать энергию слабых ветров?
Использование слабых потоков ветра может вестись по двум направлениям:
- применение конструктивно отличающихся от распространенных образцов устройств
- использование более производительных генераторов, способных вырабатывать достаточное количество энергии на низких скоростях вращения
Практика показывает, что вести поиск следует по обоим направлениям. Разработка новых вариантов крыльчатки, способной уверенно вращаться на слабых потоках, ведется постоянно, и уже имеется немало опытных образцов, демонстрирующих вполне удачные результаты.
Не менее активно ведутся разработки производительных генераторов, дающих возможность использовать слабые ветра как источник энергии. Так, аксиальные генераторы на неодимовых магнитах дают большой эффект и позволяют получать неплохое количество энергии. Некоторые мастера отмечают возникающую необходимость ограничивать возможность ускорения вращения ротора, т.е. нужна стабильность движения.
Варианты ротора, способные к эффективной работе на слабых ветрах, известны уже не первое десятилетие. В настоящее время могут быть использованы конструкции Третьякова, Онипко, высокой эффективностью отличаются парусные ветротурбины. Комплексный подход к модернизации конструкции ветрогенераторов, когда одновременно подвергаются модификации и крыльчатка, и генератор, дает положительный результат.
Ситуацию в некоторой степени осложняет неофициальный характер производимых работ. Если изобретатель захочет поделиться с общественностью своими находками, то все о них узнают, но если он не сочтет нужным обнародовать свои изыскания, то информация станет закрытой от обсуждения и осмысливания.
Что представляет собой тихоходный ветряк?
Большинство вариантов тихоходных ветряков представляют собой модифицированные образцы базовых типов крыльчатки. Используются горизонтальные виды, имеющие большую эффективность, но нуждающиеся в подъеме на достаточно большую высоту.
Для тех, кто не имеет возможности пользоваться высокими мачтами, оптимальным вариантом становится использование вертикальных конструкций ротора. Они не способны к вращению на высоких скоростях, что как раз и требуется в сложившейся ситуации. При этом, возможности, демонстрируемые вертикальными конструкциями, подтверждают реальность вращения при скорости ветра от 2 или даже 1,4 м/с.
Роторные вертикальные образцы не требовательны к выбору положения относительно потока, поэтому могут эффективно использоваться на относительно небольшом удалении от поверхности земли. Возникающая турбулентность, снижающая работоспособность горизонтальных устройств, для вертикальных конструкций не страшна и воспринимается ими как обычные потока ветра. Простота и надежность вертикальных конструкций снискали заслуженную популярность среди самодеятельных конструкторов.
Содержание / Contents
- 1 Привод
- 2 Двигатель (мотор)
- 3 Выбираем шаговый двигатель
- 4 Драйвер шагового двигателя
- 5 Богатство выбора
- 6 Драйвер ШД на микросхеме Allegro A3982
- 7 Драйвер ШД на микросхеме Allegro A3977
- 8 Схема и прототип
- 9 Печатная плата
- 10 Работа
- 11 Файлы
Сразу оговорюсь — все, что здесь далее написано, лишь мои личные выводы и не претендует на абсолютную истину. Истина рождается в споре, так что если уважаемые читатели в чем-то со мной не согласны, давайте это обсудим!
Задача построения станка обычно сводится к трем подзадачам — механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три. Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
Устройство и принцип работы

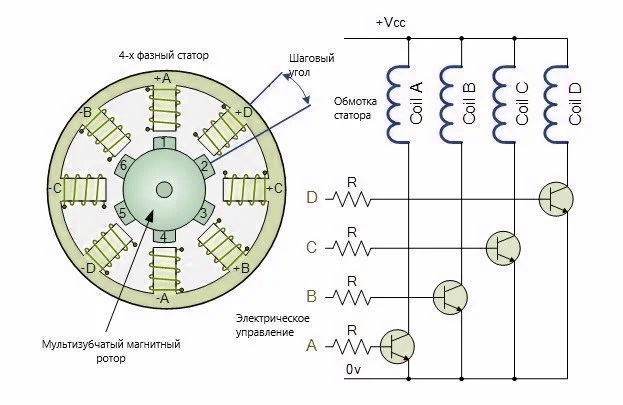
Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
↑ Схема и прототип

Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Конструкция ветряка на неодимовых магнитах
Если вы хотите узнать о создании, нужно сделать основой ступицу автомобиля с дисками тормоза, такой выбор вполне оправдан, ведь она мощная, надёжная и хорошо сбалансированная. После того как вы отчистите ступицу от краски и грязи, переходите к расстановке неодимовых магнитов. Их потребуется по 20 штук на диске, размер должен составлять 25х8 миллиметров.
Магниты нужно размещать, учитывая чередование полюсов, перед склейкой лучше создать бумажный шаблон либо прочертить линии, делящие диск на сектора, чтобы не перепутать полюса. Очень важно, чтобы они, стоящие друг напротив друга, были с разными полюсами, то есть притягивались. Клеят их супер-клеем. Поднимите бордюрчики по краям дисков, и в центре намотайте скотч или залепите пластилином для недопущения растекания. Чтобы изделие работало с максимальной отдачей, катушки статора следует рассчитать правильно. Увеличение количества полюсов приводит к росту частоты тока в катушках, благодаря этому, устройство даже при низкой частоте оборота даёт большую мощность. Намотка катушек осуществляется более толстыми проводами, с целью снижения сопротивления в них.
Когда основная часть готова, изготовляют лопасти, как в предыдущем случае и закрепляют их к мачте, что может быть изготовлена из обыкновенной пластиковой трубы с диаметром— 160 мм. В конце концов наш генератор, работающий на принципе магнитной левитации, с диаметром в полтора метра и шестью крыльями, в 8м/с, способен обеспечить до 300 Вт.
Метеорологическая обстановка в регионах России
Большинство регионов России имеют географическое расположение в глубине континента. Особенности положения на местности определяют метеорологическую обстановку, которая свидетельствует о преобладании слабых и умеренных ветров. Такая ситуация не в состоянии способствовать развитию ветроэнергетики, во всяком случае — в промышленных масштабах.
По этой же причине, а также из-за обилия других, более привлекательных возможностей, в свое время было отдано предпочтение гидроэнергетике, ставшей традиционным видом выработки энергии для России.
Актуальность использования ветрогенераторов для нашей страны невелика и концентрируется, в основном, в южных и степных регионах, в отдаленных участках страны. В промышленных масштабах вырабатывать энергию таким способом малоэффективно, так как мощность ВЭС не может пока соперничать с самой небольшой ГЭС. Кроме того, ветер, хоть и бесплатный, неиссякаемый источник энергии, но слишком нестабильный и способный попросту исчезать на некоторое время.
Для энергетики государственных масштабов такая ситуация не годится, поэтому развитие ветроэнергетики в России пойдет по другому сценарию.
Наиболее актуальной проблемой для страны является общая изношенность электросетей и отсутствие возможности подключения, наблюдающаяся не только в отдаленных, но и во многих центральных регионах России.
Поэтому главным направлением, которое проявилось стихийным образом и уверенно растет, становится использование ветрогенераторов для обеспечения энергией небольших участков или групп потребителей — отдельных домов, небольших фермерских хозяйств, групп потребителей в масштабах нескольких домовладений.
Основная проблема, возникшая при этом — неплатежеспособность населения, ограничивающая приобретение готовых установок заводского производства. Равновесие достигается за счет широко распространившегося самостоятельного изготовления ветрогенераторов, способных выполнять свои функции на достаточно высоком уровне, но обходящихся своим владельцам в неизмеримо меньшие суммы.
Ветрогенераторы с генераторами из мотор колеса
Многие ищут готовый генератор для изготовления ветрогенератора, и такой генератор есть, это велосипедное мотор колесо, есть и более мощные, для скутеров и электромобилей. Мотор колесо это готовый трёхфазный генератор на магнитах, номинальная мощность которого в режиме генератора достигается уже при 500-700 об/м, бывают и более высокооборотистые, зависит от конкретной модели. Например мотор колесо (TM Volta bikes 48vv1000w), скорость вращения которого на холостом ходу в режиме двигателя 460 об/м при 48v. В режиме генератора он выдаст 1кВт при примерно 600 об/м на 48v АКБ. На 12-ти вольтовый АКБ конечно меньше, но заряд будет начинаться примерно при 100-120 об/м, а максимальная мощность с хорошим трёхлопастным винтом будет не более 400-500 ватт. На 24 вольт АКБ максимальная мощность будет лучше, но начало заряда акб с 200-250 об/м. Есть у мотор колеса и неприятность, это довольно ощутимое залипание, по этому будет тяжело стартовать на слабом ветре, но это уже зависит от стартового момента винта. Винт это отдельная тема и я пока не встречал ветряки с мотор колёсами и хорошими винтами, но вот что мне удалось найти по готовым ветрогенераторам.
Что такое драйвер шагового двигателя, принцип работы
Все FDM 3D принтеры используют шаговые двигатели для позиционирования оси. Их работа состоит в том, чтобы точно позиционировать печатающую головку и платформу построения, а также управлять подачей нить в экструдер. Для понимания работы драйверов шаговых двигателей вы должны понимать как работает сам мотор: шаговые двигатели не вращаются так, как традиционные двигатели, вместо этого они шагают . Шаговые двигатели совершают повторяющиеся движения с небольшими фиксированными шагами, которые невооруженным глазом выглядят как непрерывное вращение двигателя. Размер каждой ступени определяется двигателем, а мощность поворота исходит от драйвера шагового двигателя.
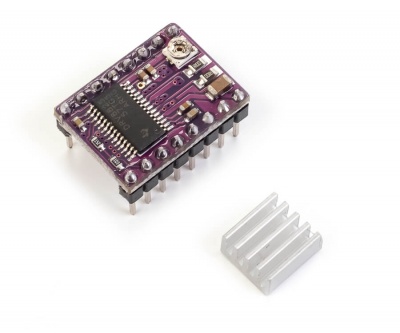
Какие драйвера для шаговых двигателей 3D принтера можно купить?
1. TMC2208, TMC2130, TMC2100. Выходной ток на обмотку с дополнительным охлаждением – до 2 А, пиковый выходной ток 2,5А. Напряжения питания силовой части: 4.75 — 36 В. Дробление шага: 1/2, 1/4, ⅛ и 1/16 с возможностью интерполяции до 1/256. Он используется для снижения уровня шума при работе с 8-битными микроконтроллерами. Может применяться в устройствах с маломощными режимами работы, а так же в оборудовании, где востребована высокая энергетическая эффективность моторов. TMC2208 построен на микросхеме от Trinamic и способен выдавать до 2.5 А на обмотку, чего достаточно для использования в 3D принтерах и ЧПУ. При этом решается проблема шумности работы шаговых двигателей за счёт эффективных алгоритмов формирования управляющих импульсов (StealthChop2™) и управления током.
Тихие драйверы, рекомендуем ставить именно их. Стоит дороже остальных около 15 $.
2. A4988 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А, без охлаждения – до 1 А. Напряжения питания силовой части: 8-35 В. Преимущества драйвера А4988 – наличие защиты от перегрузок и перегрева, возможность регулировки тока и несколько вариантов микрошага. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16. На 9В значительно тише, чем на 12В, без потери крутящего момента. Резкое усиление звука происходит с 11В до 12В. Стоимость около 6 $.
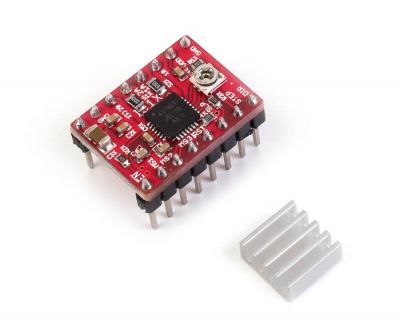
3. DRV8825 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А. Напряжения питания силовой части: 8-45 В. Электрическая и механическая совместимость с драйвером A4988. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32. По отзывам имеют конструктивный недостаток, что выражения в появлении дефектов на поверхности отпечатка в виде вертикальных полос (полосы зебры). Недостаток можно устранить установив TL-Smoother, но гораздо рентабельнее будет купить вместо них TMC2208. Стоимость около 6 $.
Замкнутые и разомкнутые системы
Системы позиционирования обычно используют один из двух способов: системы с замкнутым и разомкнутым контуром. Так в чем же разница между этими двумя подходами к позиционированию?
В системах с замкнутым контуром обычно используются серводвигатели для управления скоростью и положением движущейся оси. Серводвигатели работают так же, как и любой обычный двигатель, когда на них подается питание, они вращаются. Это вращение принимает непрерывное плавное движение. Задача серводвигателя — не только приводить двигатель в действие, но и точно контролировать скорость. Наряду со скоростью в замкнутой системе также требуется обратная связь по положению. Обычно это обеспечивается энкодером или линейной шкалой. Позиционная обратная связь с контроллером машины позволяет ему быстро двигаться к заданному месту, а затем плавно замедляться, чтобы остановиться на цели.
В системах с разомкнутым контуром нет устройства обратной связи для контроля скорости или положения. Вместо этого расстояние, которое необходимо преодолеть от текущего местоположения, делится системой управления машиной на несколько точных шагов определенного размера. Система управления также определяет оптимальную кривую скорости системы на основе предварительно определенных параметров. Затем команды поступают на шаговый двигатель в виде импульсов. Работа драйвера шагового двигателя заключается в преобразовании командных импульсов в фактические шаги привода двигателя далее шаговые двигатели продвигаются по этим шагам, достигая желаемого результата.
Работа шагового двигателя
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает угловые перемещения (шаги) ротора.
Шаговые двигатели, имеют достаточно высокую надежность и большой срок службы. При увеличении скорости двигателя, уменьшается вращающийся момент.
Шаговые двигатели дают больше вибрации наряду с другими типами двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. Из-за этого шаговый двигатель более шумный. Вибрация может быть сильная, что может привести двигатель к потери момента потому, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения.
Существует четыре главных типа шаговых двигателей:
- Шаговые двигателя с постоянным магнитом
- Гибридный шаговые двигателя
- Двигатели с переменным магнитным сопротивлением
- Биполярные и униполярные шаговые двигатели
Шаговые электродвигатели состоят из статора с обмотками возбуждения и ротора из магнитомягкого или из магнитотвёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. В зависимоти от конструкции ротора выделяют следующие разновидности шаговых двигателей: с постоянными магнитами (ротор из магнитотвёрдого материала), реактивный (ротор из магнитомягкого материала), гибридный. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
В машиностроении более распространены высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора.
Преимущества Шагового двигателя:
- Устойчив в работе
- Работает в широком диапазоне фрикционных и инерционных нагрузок и скоростей, скорость пропорциональна частоте входных импульсов.
- Нет необходимости в обратной связи
- Намного дешевле других типов двигателей
- Подшипники — единственный механизм износа, за счет этого долгий срок эксплуатации.
- Превосходный крутящий момент при низких скоростях или нулевых скоростях
- Может работать с большой нагрузкой без использования редукторов
- Двигатель не может быть поврежден механической перегрузкой
- Возможность быстрого старта, остановки, реверсирования
Главным преимуществом шаговых приводов является точность. При подаче потенциалов на обмотки, шаговый двигатель повернется строго на определенный угол. Шаговый привод, можно приравнять к недорогой альтернативе сервоприводу, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Преимущества Главное преимущество шаговых приводов — точность. При подаче потенциалов на обмотки шаговый двигатель повернётся строго на определённый угол. К приятным моментам можно отнести стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика. Недостатки Возможность «проскальзывания» ротора — наиболее известная проблема этих двигателей. Это может произойти при превышении нагрузки на валу, при неверной настройке управляющей программы (например, ускорение старта или торможения не адекватно перемещаемой массе), при приближении скорости вращения к резонансной. Наличие датчика позволяет обнаружить проблему, но автоматически скомпенсировать её без остановки производственной программы возможно только в очень редких случаях. Чтобы избежать проскальзывания ротора, как один из способов, можно увеличить мощность двигателя.
Недостатки шагового двигателя:
- Постоянное потребление энергии, даже при уменьшении нагрузки и без нагрузки
- У шагового двигателя существует резонанс
- Из-за того что нет обратной связи, можно потерять положение движения.
- Падение крутящего момента на высокой скорости
- Низкая ремонтопригодность
Принцип работы шагового двигателя
На примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора и окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например,» ADCB, ADCB, ADCB, A…» и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на» ABCD, ABCD, ABCD, A…» и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 ° / 24 = 15 ° .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Принцип работы шагового двигателя 3D принтера
Угол шага двигателя может достигать 90 градусов, что означает, что двигатель будет вращаться на 360 градусов за четыре шага. Однако более типичный угол шага для двигателей 3D принтера составляет 1,8 градуса, что означает, что для полного поворота требуется 200 шагов (360 / 1,8).
Угол шага определяется размещением катушек двигателя и конструкцией магнитных полюсов в роторе.
Если известно, что для поворота двигателя на 360 градусов требуется 200 шагов и двигатель подключен к ходовому винту с шагом 1 мм (1 мм хода на каждое вращение), то каждый шаг двигателя продвигает ось вперед на 0,005 мм. Таким образом, количество шагов, необходимых для достижения точного местоположения, можно легко рассчитать.
Расчет количества необходимых шагов управляется контроллером (драйвером шагового двигателя.
Драйвер шагового двигателя

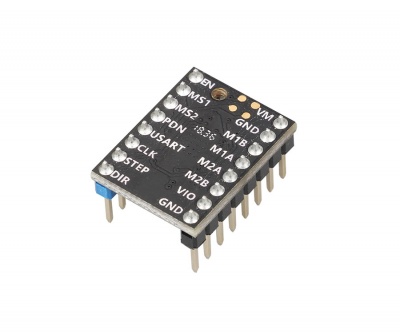
драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться ). Стандартом управления являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Управлять шаговым двигателем сложнее, чем обычным коллекторным двигателем, нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления шаговыми двигателями были разработаны специальные устройства называемые драйверами. Они позволяет управлять вращением ротора в соответствии с сигналами управления и определенным образом делить физический шаг на более мелкие дискреты.
К драйверу подключается источник питания, шаговый двигатель и сигналы управления с платы контроллера. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы шагового двигателя могут иметь дополнительные функции:
- Контроль перегрузок по току.
- Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
- Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
- Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
- Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
- Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
- Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Драйверы шаговых двигателей различаются по сложности. Современные драйверы можно комбинировать с множеством различных типов шаговых двигателей. Настройки для конкретного двигателя обычно настраивается пользователем во время установки. Но в целом драйверы шаговых двигателей — относительно простые устройства.
На иллюстрации выше изображен драйвер A4988. Задача компонентов, состоит в том, чтобы реагировать импульсные команды шага, поступающие от контроллера машины и преобразовывать их в правильную схему включения-выключения, необходимую для привода шагового двигателя. Эта схема активирует фазы в правильном порядке, чтобы двигать двигатель шаг за шагом в том или ином направлении.
Здесь необходимо отметить важный момент: в драйвере шагового двигателя очень мало интеллекта. Эта функция предоставляется контроллеру 3D принтера. Фактически, драйвер выполняет только две основные функции: упорядочивание фаз и управление фазным током.
Драйвера могут поставляться как отдельный компонент, так и вместе с платы контроллеров для 3D принтеров, например таких как Creality 4.2.7.
Сглаживающее устройство TL-Smoother
Плата, которая соединяет шаговый драйвер и шаговый двигатель, уменьшая шум и вибрации на вашем 3D-принтере, снижая риск образования дефекта «полоса зебры».
Эта небольшая плата имеет восемь выпрямительных диодов, которые улучшают форму волны шагового двигателя, в частности, для более старых более дешевых шаговых драйверов, например DRV8825 и A4988. Улучшение формы волны снижает шум двигателя за счет уменьшения вибрации. Поскольку вибрации уменьшаются, качество печати также улучшается. Просто установите плату между драйвером и шаговым двигателем, ориентация не имеет значения. Для удобства в комплект входит небольшой 4-проводной разъем длиной 20 см, чтобы подключить плату к электронике. Стоимость около 7 $

Дефект полосы зебры или муар
Как работает TL-Smoother
Происхождение технологии плавного сглаживания TL до 2015 года, когда пользователь Schrodinger Z написал в блоге о резких движениях шагового двигателя и исследовал, что происходит. Как оказалось, шаговые драйверы DRV8825, которые он использовал, не генерировали гладкие синусоидальные сигналы для двигателей. При дополнительном осмотре было обнаружено, что драйверы не могут должным образом выводить сигналы при малых токах, так как они находятся в так называемой «мертвой зоне».
TL были созданы для устранения конкретного недостатка конструкции в драйверах DRV8825.
Как сделать из шагового двигателя обычный
Шаговый электродвигатель в режиме генератора — массовые ошибки в коммутации обмоток.
Итак, друзья, праздники идут полным ходом. Седьмой день ничегонеделания, седьмой день валялся в кровати, пил пиво и смотрел очередной технический ролик youtube. Тема была ветро-микроэнергетика. Ну конечно, при малых скоростях вращения турбины и малых (балконных) размерах ветрогенератора, априори, самым эффективным генератором всегда был и есть генератор с возбуждением от постоянных магнитов. Из всего, что под рукой, сделать его можно, ну конечно — же из шагового двигателя. Коммутация обмоток биполярных шаговиков получалась правильной у всех авторов видео и статей. А вот применение в качестве генератора униполярного ШД явилось просто камнем преткновения. Чудовищные ошибки и полное непонимание работы униполярника. Я аж вскочил, сел за стол и зарисовал его. Благо, несколько штук валялось.

Друзья, это ведь униполярный шаговый двигатель. Каждая половинная секция обмотки — это катушка ОДНОГО и ТОГО-ЖЕ полюса, намотанная на ОДНОМ и ТОМ-ЖЕ полюсе встречно другой полусекции (бифиллярно).
Омическое сопротивление полусекций действительно суммируется, но как может суммироваться выработанная полусекциями ЭДС, при их бифиллярной намотке ?
Так что, для униполярного ШД в режиме генератора есть только два решения в коммутации обмоток.
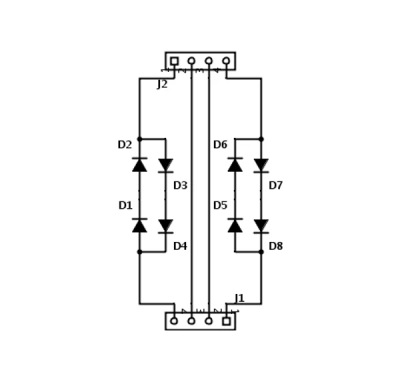
1.Двуполупериодный выпрямитель в каждую обмотку, c использованием средней точки полусекции каждой обмотки.
2.Включение по схеме четырехфазного генератора. Выводы 5, 6 соединить вместе. Выводы 1, 2, 3, 4 пустить на четырехфазный диодный мост ))))
Изучаем миниатюрный шаговый двигатель
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
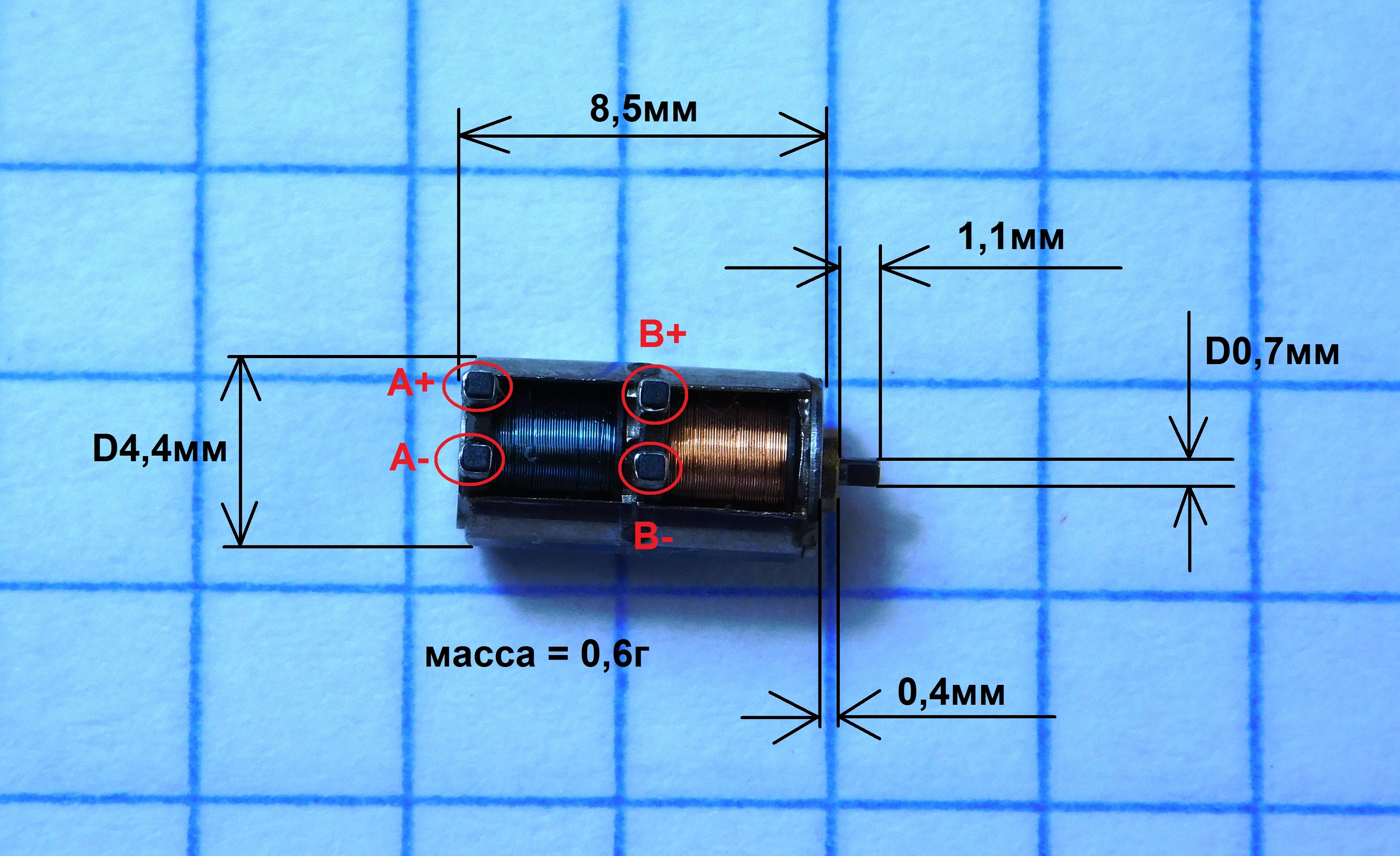
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Знакомство
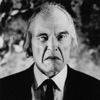
Сначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
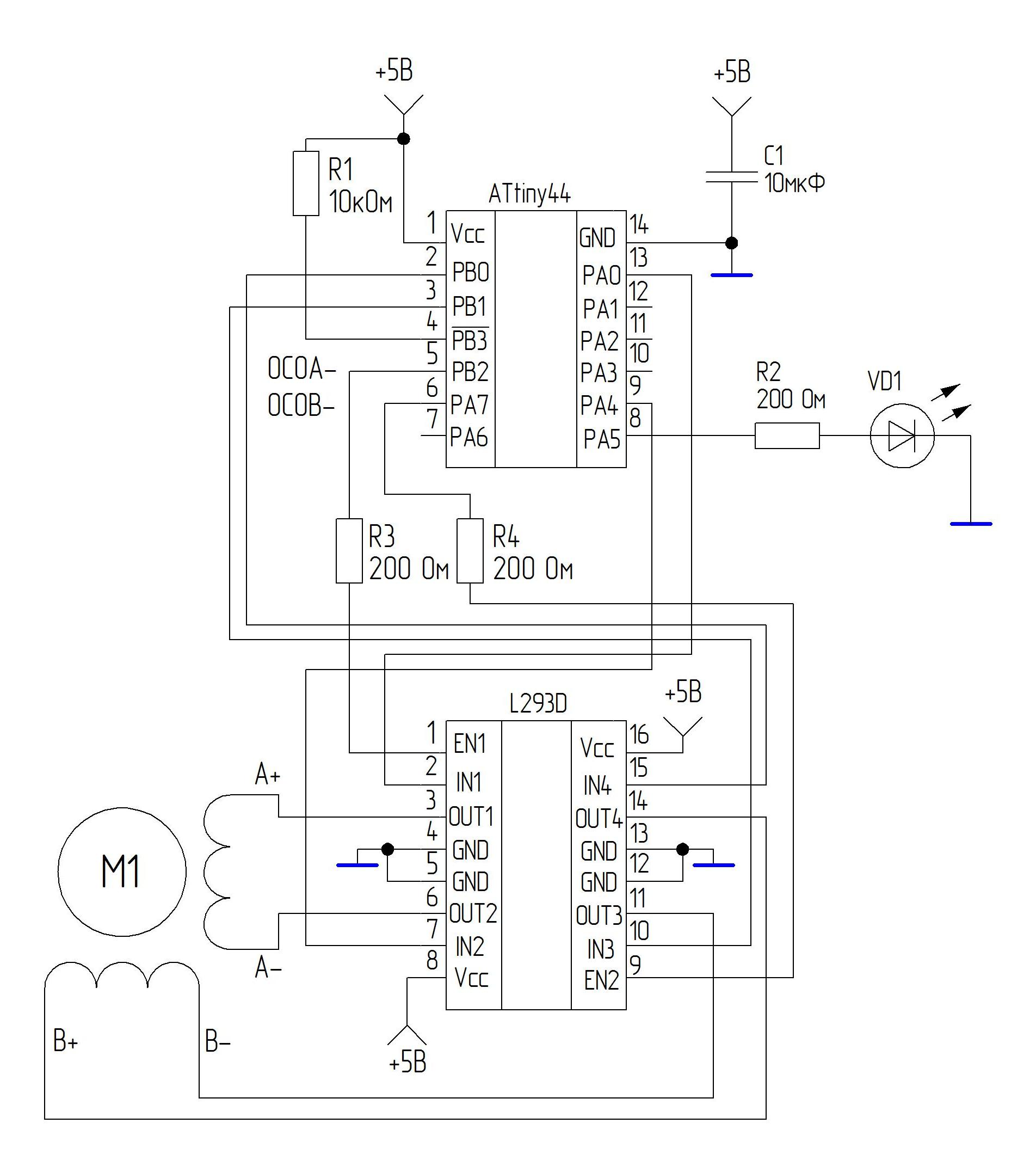
Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:
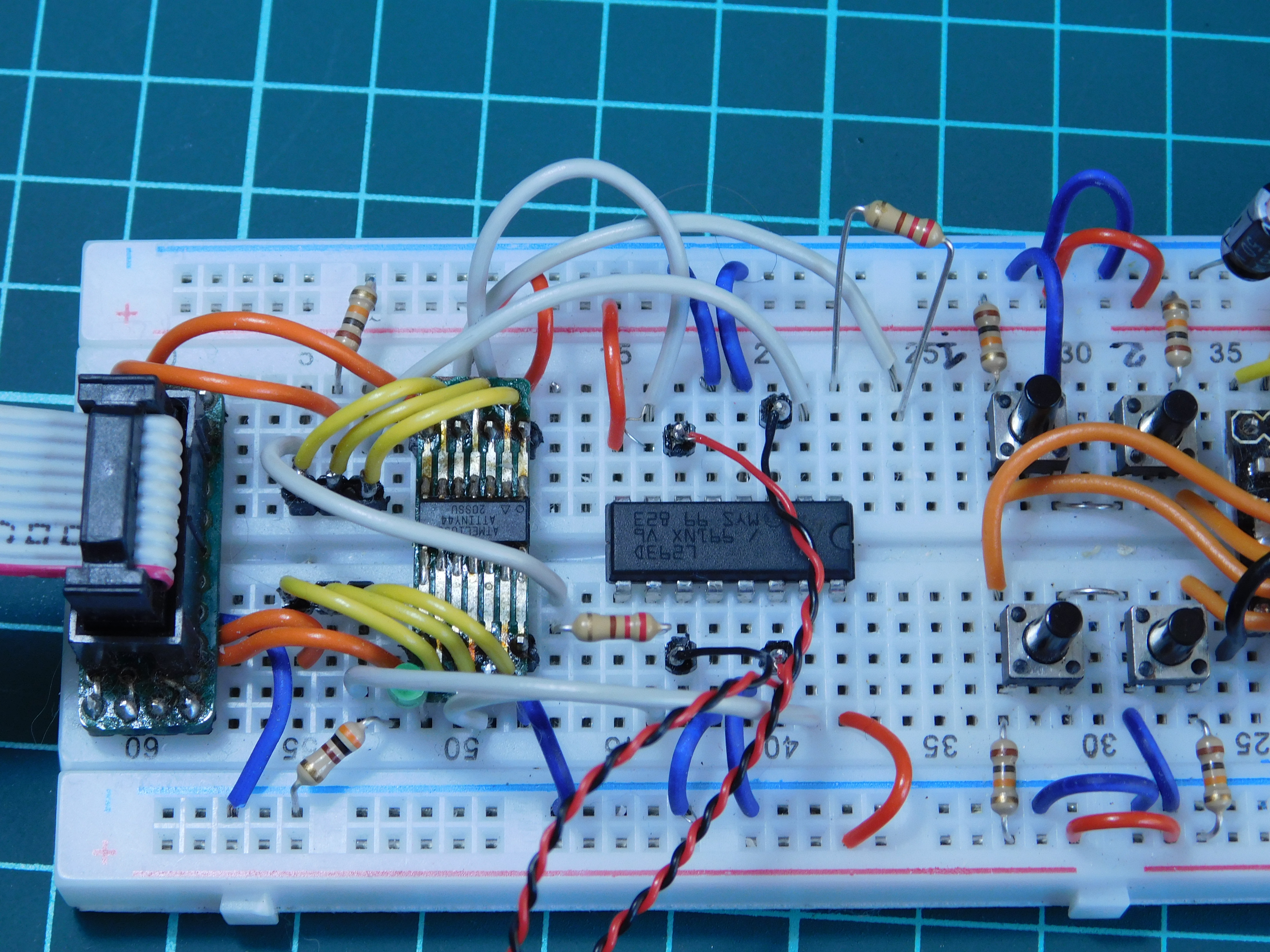
И вот так расположен наш подопытный:
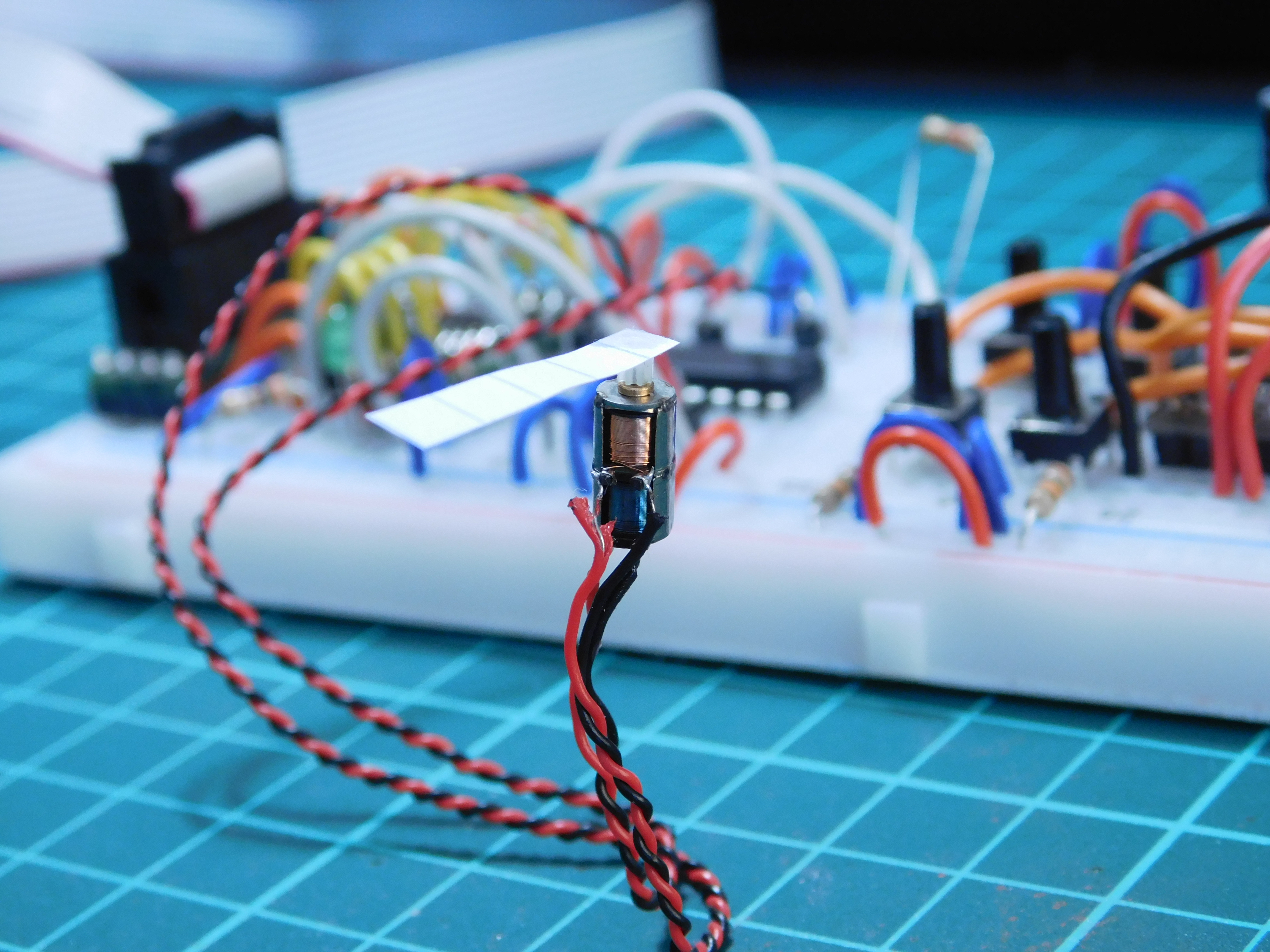
Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:
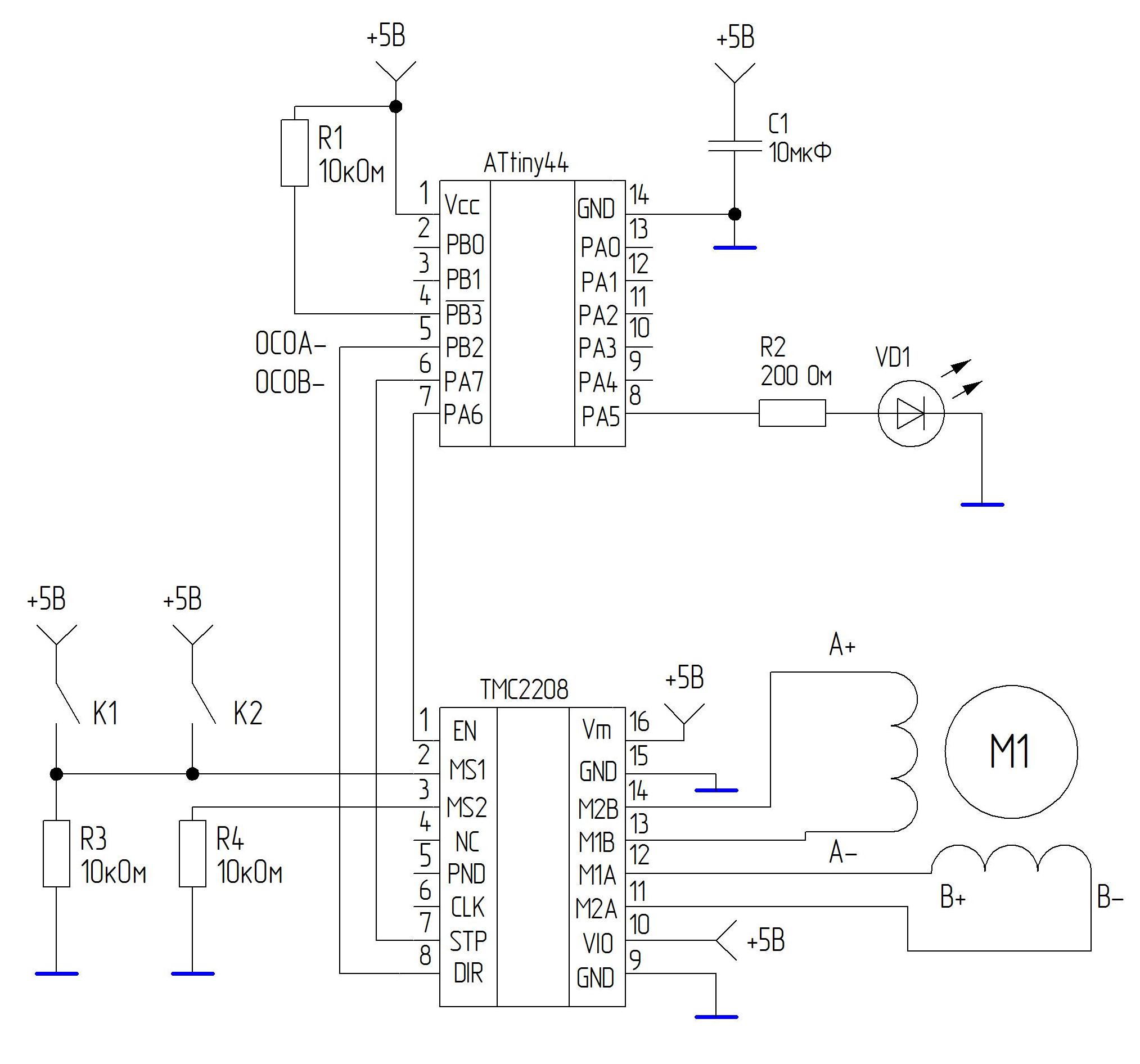
Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.
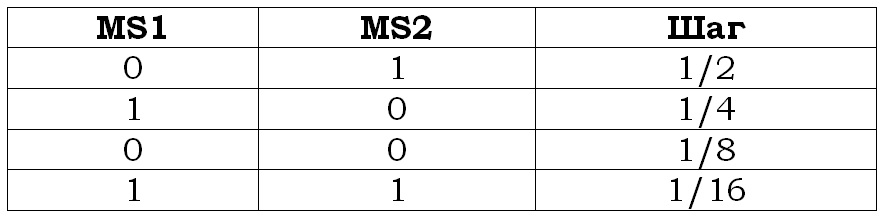
Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.
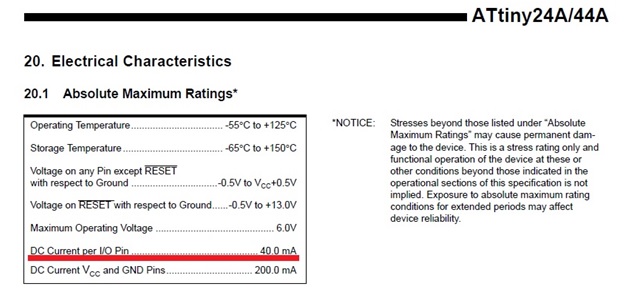
Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:
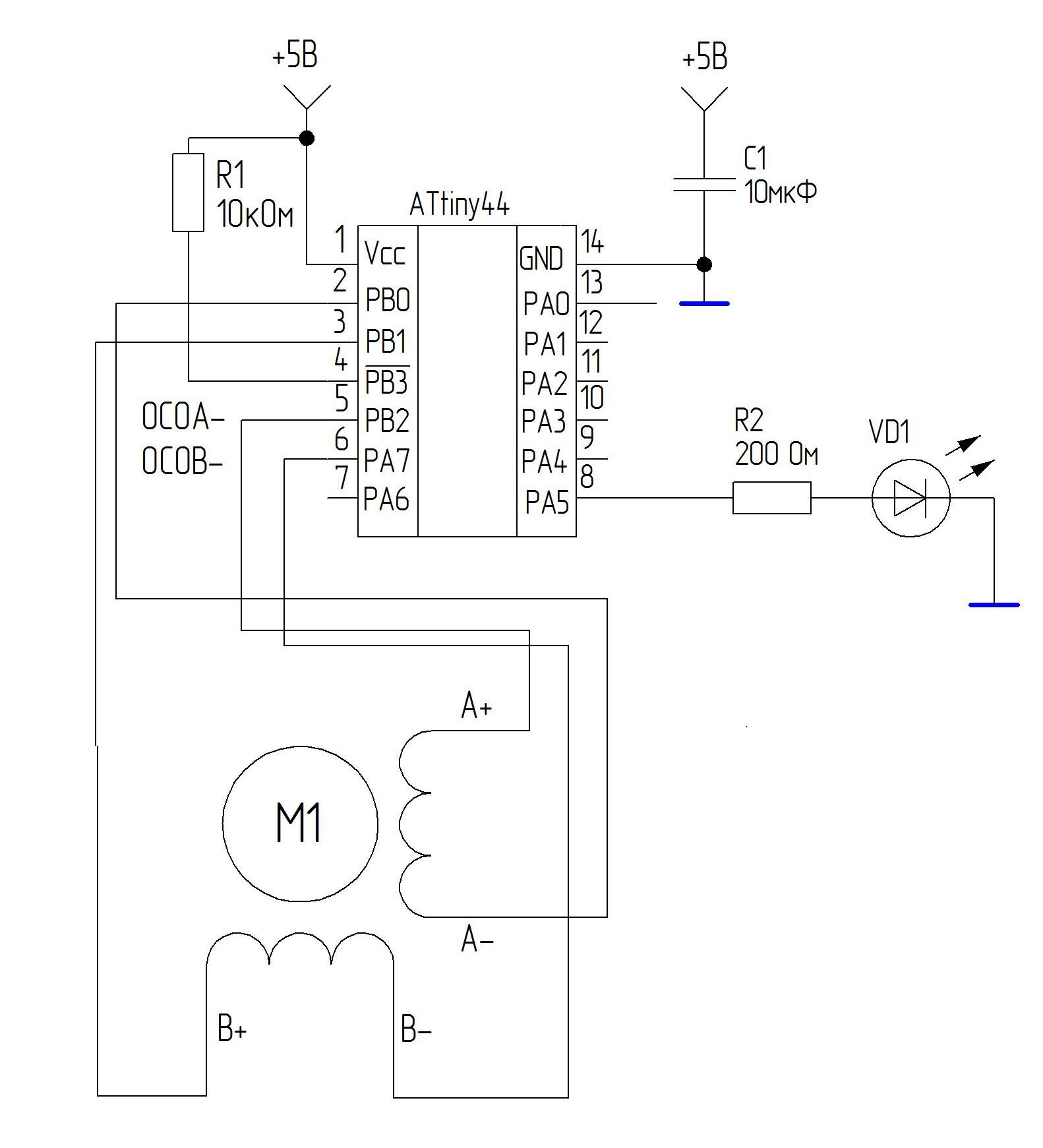
Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Шаговый мотор как простой привод? Можно ли.
Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Войти
Уже есть аккаунт? Войти в систему.
Последние посетители 0 пользователей онлайн
Ни одного зарегистрированного пользователя не просматривает данную страницу
- Уже зарегистрированы? Войти
- Регистрация
Главная
Активность
- Создать.
Важная информация
Мы разместили cookie-файлы на ваше устройство, чтобы помочь сделать этот сайт лучше. Вы можете изменить свои настройки cookie-файлов, или продолжить без изменения настроек.