История появления подруливающих задних колес
Совершенствование такого важного параметра, как управляемость, остается одним из приоритетных направлений при разработке новых автомобилей. Современные системы рулевого управления неплохо справляются со своими функциями, и разработчики в погоне за управляемостью, чаще всего идут по пути создания дополнительных устройств, не имеющих отношения к рулевому управлению .
К этим устройствам можно отнести антипробуксовочные системы и компьютерные системы управления курсовой устойчивостью.
Однако еще до массового внедрения микропроцессоров в системы управления автомобилем существовали разработки, позволявшие улучшить управляемости. К ним относятся и подруливающие задние колеса.
Примеры оснащения подвижной техники подруливающими задними колесами можно найти еще в начала двадцатого века. Этот принцип давно используется в погрузчиках, работающих в замкнутых тесных пространствах складов, в заводских цехах и пр. Подруливающая задняя подвеска еще в довоенные времена применялась в тракторах и внедорожниках, к примеру, в довоенном джипе Mercedes Kübelwagen G5.
Подруливающие задние колеса и теория прохождения поворота
Даже при наличии самой прогрессивной конструкции подвески, к примеру, многорычажной, при движении на высокой скорости серьезным фактором, влияющим на управляемость, становится инерция прямолинейного движения задних колес, сопротивляющихся повороту. При повороте рулевого колеса, когда передние колеса начинают двигаться влево или вправо в направлении поворота, задние неуправляемые колеса пытаются оставаться на прежней траектории.
Типы подруливающей задней подвески и схемы работы
В самых ранних системах — к примеру, на тракторах двадцатых годов прошлого века, угол подруливания был большим, до 15 градусов. С повышением максимальной скорости от таких больших углов пришлось отказаться. В современных автомобилях системы подруливающих колес обеспечивают поворот максимум на 5-8 градусов.
Задняя подруливающая подвеска делится на два вида — активную и пассивную.
Активная подруливающая подвеска
Если автомобиль оснащен активной подруливающей задней подвеской, все четыре колеса поворачивают сразу, реагируя на движение руля. В современных системах усилие от рулевого колеса на задние колеса передается не механически при помощи системы рычагов, а через команду электронного блока управления и втягивающие реле, иначе называемым актуаторами. Они передвигают задние рулевые тяги, схожие с теми, что применяются в основной системе рулевого управления.
Активная подруливающая подвеска работает в двух режимах. При движении на низкой скорости, к примеру, на автостоянке или при заезде в гараж, в момент, когда передние колеса повернуты вправо, задние поворачивают влево, и наоборот. Это дает возможность уменьшить радиус поворота на двадцать — двадцать пять процентов.
На высокой скорости схема работы меняется. При повороте передних колес влево, задние колеса подруливают в ту же сторону, но на меньший угол. За определением точного угла подруливания следит электронный блок управления, принимая в расчет показания датчика углового ускорения, датчика скорости и других, формируя оптимальный алгоритм прохождения виража.
Наибольшей известностью пользуются системы подруливающей задней подвески японских производителей. К примеру, компания Honda начала устанавливать в качестве опции подруливающие задние колеса на спорт-купе Prelude еще в 1987 году. В 1988 году такая же опция появилась у фирмы Mazda для моделеи 626 и МХ6. Американские производители также экспериментировали с подруливающими задними колесами. Система производства General Motors, носившая имя Quadrasteer, в качестве опции устанавливалась на внедорожники Suburban и Yukon, а также на пикап Silverado.
Система компании Nissan под именем HICAS в первые годы производства имела гидравлический привод и была объединена в единую схему с гидроусилителем рулевого управления. Система устанавливалась на заднеприводные автомобили Nissan и Infiniti. В середине девяностых от сложной и не слишком надежной гидравлической системы отказались в пользу привода от управляемых электроникой актуаторов. В 2008 году корпорация Renault-Nissan представила новую систему подруливающей подвески Active Drive в автомобилях Ranault Laguna.
Европейские производители также не остались в стороне. К примеру, современная система подруливающих задних колес в автомобилях BMW назвывается Integral Active Steering.
Пассивная подруливающая подвеска
Во многих современных автомобилях применена упрощенная система подруливающих задних колес, противодействующая инерции прямолинейного движения за счет использования в подвеске элементов, обладающих определенными физическими свойствами. Такой тип подруливающей подвески называется пассивным. В автомобилях с пассивным подруливанием задняя подвеска строится по особой геометрии, и, как правило с применением подвижной тяги Уатта. Система рассчитана так, что при прохождении виража на высокой скорости задние колеса за счет перераспределения сил в подвеске имеют тенденцию подруливать в ту же сторону, что и передние. Помимо геометрии эффект усиливается подбором сайлентблоков определенной формы и упругости. Такая конструкция существенно улучает стабильность автомобиля при повороте. Пассивной системой подруливающих задних колес оснащались, к примеру, автомобили Ford Focus первого поколения.
Составлен Топ-10 лучших автомобилей в истории с подруливающей задней осью
Машины с управляемой задней осью горячо любимы автомобилистами за их особый нрав.
![70_1.[6]](https://www.32cars.ru/uploads/images/2020/05/01/70_1.%5B6%5D.jpg)
Ни для кого не секрет, что подобные автомобили впервые появились в Японии в 1985 году на модели Nissan R31 Skyline, автомобиле, который является синонимом инноваций. Тем не менее, технология была популяризирована Honda Prelude 1987 года, который был продан во всем мире.
Как и в случае с большим количеством инноваций, ценность новинок рулевого управления с годами уменьшилась. В то же время страховщики с осторожностью относились к счетам на ремонт подобных машин, так как он всегда оказывался дорогостоящим. После этого подруливающие задние колеса почти исчезли из продажи.
До тех пор, пока инженеры не осознали, что по мере того, как автомобили всех форм и размеров становятся все больше и тяжелее, активные системы рулевого управления задними колесами могут помочь сделать их более маневренными. Так, в рейтинг актуальных моделей и машин из прошлого, вошли 10 основных автомобилей, которые являются лучшими в данном сегменте.

1. BMW 850 CSi
Хотите узнать причину, по которой флагманская версия 850 CSi серии E31 8 стоит так дешево в наши дни? Его система Aktive Hinterachs-Kinematik (AHK) имеет привычку работать неправильно, и чаще всего это требует огромных затрат на исправление. Автомобиль был оснащен 5,6-литровым V12 мощностью 375 л.с. и выиграл BMW Motorsport. Проблема была в том, что в начале 1990-х годов машина стоила почти 80 000 фунтов стерлингов (около 7,3 млн руб.).

2. Honda Prelude
Honda Prelude была автомобилем, который привлек общественное внимание к рулевому управлению. Его система была способна управлять задними колесами так же, как передние, на 1,5 градуса и до рулевого входа 246 градусов. С помощью блокировки задние колеса могли двигаться в противоположном направлении на 5,33 градуса, что давало Honda компактный радиус разворота — всего 10 метров. Однако стоимость сложного рулевого механизма также не нравилась страховщикам.

3. Xedos 9
Торговая марка, принадлежащая Mazda, пользовалася скромным успехом в Великобритании с моделью Xedos 6, но большая машина – Xedos 9 — так и не стала популярной. Возможно, это потому, что британская версия лишилась активной системырулевого управления, доступной в японских версиях.

4. Lamborghini Urus
Lamborghini добился больших успехов с обновленным полноприводным Aventador S, с возможностью отключения одной из осей. Шасси суперкара потом досталось внедорожнику Urus. Это был ключевой элемент в создании высокопроизводительного внедорожника, который не испортил репутацию второго самого известного итальянского производителя спортивных автомобилей.

5. Mitsubishi 3000 GT
3000 GT получил почти такой же богатый набор опций, как DeLorean Дока Брауна: активная аэродинамическая система, полный привод, подруливающие задние колёса, адаптивная подвеска и два турбонагнетателя. Тем не менее, британские водители выбирали именно эту модель, вместо BMW или Porsche.

6. Ford F-150 Platinum ZF
Когда длина автомобиля составляет 5,8 метра, а круг разворота — около 14 метров, одной мысли о многоэтажной парковке, достаточно, чтобы покрыться холодным потом. Именно поэтому последний Ford F-150 получил систему рулевого управления задними колесами ZF. С тех пор Ford подал заявку на патент на такую систему на текущем F-150.

7. Porsche 911 GT3
Первым автомобилей марки, который получил активную заднюю систему рулевого управления стал 918 Spyder. Однако наиболее доступным стал 911 GT3. Инженеры компании проделали хорошую работу.

8. Ferrari F12TDF
Обладая мощностью почти 770 л.с., лимитированный Ferrari F12TDF также получил систему рулевого управления задними колесами, которую она назвала «виртуальной короткой колесной базой». Примечательно, что аппаратное обеспечение ZF прибавило всего 5 кг к весу в снаряженном состоянии, который был уменьшен на 110 кг по сравнению со стандартным F12. Технология рулевого управления особой модели после применялась в GTC4 Lusso и 812 Superfast.
![71_1.[5]](https://www.32cars.ru/uploads/images/2020/05/01/71_1.%5B5%5D.jpg)
9. Renault Megane RS
В хэтчбеке это может показаться излишним, но инженеры Renault Sport использовали в своих интересах рулевое управление с четырьмя колесами последнего поколения — 4Control — делая его регулируемым в зависимости от условий и идеально подходящим для трековых дней. Renault сообщает, что угол поворота рулевого колеса уменьшается на 40% по сравнению с Mégane без системы.
![70_1.[5]](https://www.32cars.ru/uploads/images/2020/05/01/70_1.%5B5%5D.jpg)
10. Nissan 300 ZX
В 1990 году Nissan изо всех сил пытался убедить британских водителей в том, что компания, наиболее известная по модели Micra, могла бы сотрудничать с Porsche, поэтому продажи 300 ZX вскоре замедлились до незначительного числа. Хотя модель имела много интересного, в частности возможность отключить аппаратное управление полным приводом High Capacity Active Steering (HICAS).
Четыре на четыре: зачем современным машинам задние подруливающие колеса

Когда японские машины считались самыми-самыми продвинутыми, легенды доносили о том, что в Стране восходящего солнца есть машины, у которых поворачиваются все четыре колеса. Потом в суете обновок те времена как-то забылись. Бурное начало девяностых годов прошло, и в серийном производстве остались только самые нужные из технических решений той поры. Но сейчас интерес к полноуправляемым шасси снова растет, правда, уже на ином техническом уровне, без дополнительных рулевых валов и с заметно упростившейся задней подвеской.
И ладно бы только на Porsche 911 GT3 или Lamborghini Aventador — но ведь на обычном Renault Espace тоже внедряют поворачивающиеся задние колеса. В чем смысл такого технического решения, и ради чего шли на такие сложности производители? И почему о технологии забыли до недавнего времени?
Зачем нужна управляемость
Настройка управляемости всегда считалась очень сложной работой, а машины с идеальным балансом попадали в число лучших. Шасси современных машин, на первый взгляд, мало изменилось в сравнении с восьмидесятыми годами, но отличие есть. И оно отлично себя проявляет, если взглянуть на достигаемые машинами скорости на маневре «переставка» или на гоночной трассе.

Современный семейный хэтчбек способен опередить большую часть суперкаров тридцатилетней давности на автодроме, и не в последнюю очередь за счет тонкой настройки управляемости и отличной «цепкости» шасси. Конечно, и резина, и эластичность моторов тоже играют свою роль, но сейчас в первую очередь поговорим о геометрии.
Нет, речь вовсе не о школьном предмете — я про геометрию шасси. Это набор параметров, описывающих изменения в положении элементов шасси при изменении нагрузки. Суть фокуса в том, что при прохождении поворотов машина наклоняется, да и дорога имеет свой профиль. При правильном расчете параметров геометрии шасси покрышки всегда имеют оптимальный для данных условий контакт с дорогой.
Речь здесь не о максимальной прижимной силе, а о соотношении коэффициента сцепления колес передней и задней оси, правого и левого колес, и о способности колеса в каждый момент воспринимать нагрузку по трем направлениям.
Задача повысить площадь контакта колес с дорогой не так проста, как кажется.
Конечно же, можно «зажать» подвески и сделать перемещения меньше. Это полезно со многих точек зрения, и часто так и поступают, но ведь перемещения можно использовать для благого дела. Например, чтобы колеса в повороте поворачивались сами. Если сложно рассчитать перемещения, то можно немножко подыграть им, поставив рулевое управление и на заднюю ось, создав полноуправляемую машину.
А можно задать перемещение с помощью усложненной подвески — например, многорычажной, которая позволяет настраивать геометрию движения колеса в очень широких пределах и сохранять эти параметры при износе элементов длительное время.
Если вы не гонщик, это не означает, что управляемость для вас не важна. Просто в вашем случае этот термин означает совсем иной набор предпочтительных параметров, нежели идеальная точность и быстрота реакций. Собственно, активная безопасность машины во многом зависит от ее управляемости, и потому над этими параметрами конструкторы автомобилей работают много и продуктивно. А какое отношение это имеет к геометрии шасси?
Как машина поворачивает
Казалось бы, чего проще: повернул передние колеса — и машина повернула. Но на практике все заметно сложнее. Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Машина в результате получит некоторый крен, в зависимости от высоты центра крена передней и задней подвесок и положения центра масс в этот момент. Задние колеса или даже неразрезной задний мост тоже повернутся — просто в силу того, что при любом изменении положения кузова колеса не просто ходят вверх-вниз, а тоже чуточку, но поворачивают.
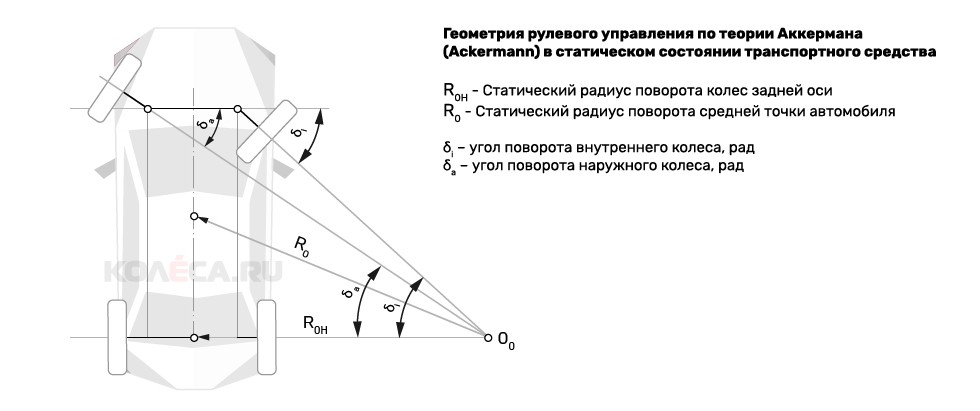
В динамике к этой куче параметров добавятся кренящий момент от центра масс машины и уводы резины. Среди всех параметров, которые необходимо рассчитать, для нас наибольшее значение будет иметь мгновенный центр поворота и радиусы поворота передней и задней осей и центра масс. Мгновенный центр поворота совсем не совпадает с геометрическим, который вычислен по правилу Аккермана – точкой, в которой находятся центры окружностей качения всех колес. Более того, в динамике такой точки просто не существует из-за скольжений. Но на рисунках для примера рассмотрена более простая ситуация, чтобы не наводить путаницы.
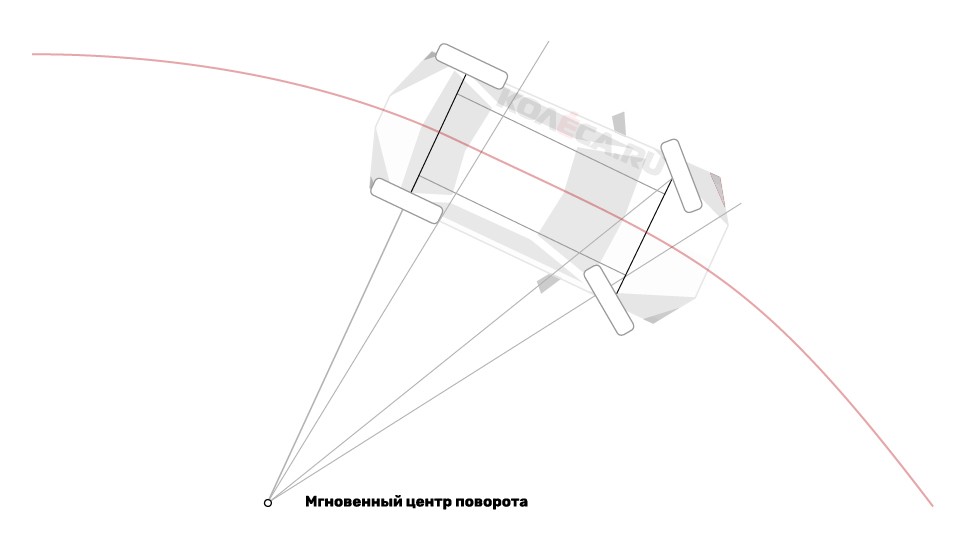
На первый взгляд, если доворачивать задние колеса в противоположную от передних сторону, то уменьшается радиус поворота машины. Это важно с точки зрения удобства эксплуатации и маневренности. Чем меньше радиус, тем удобнее. Но машины ездят не только на скоростях погрузчиков в торговом центре, так что приходится учитывать и другие факторы.
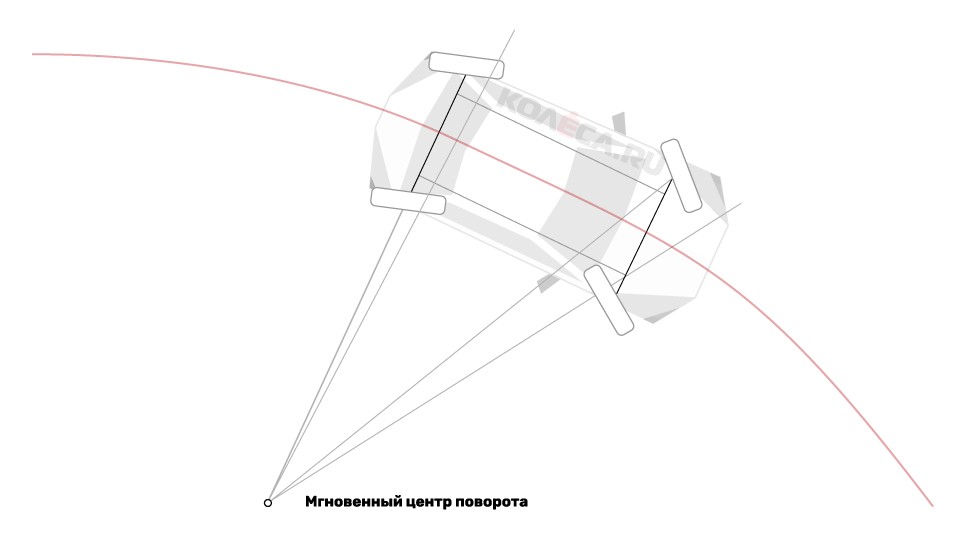
А что если поворачивать колеса в ту же сторону, что и передние? На первый взгляд, бессмыслица: машина «поедет боком» по большому радиусу, если задние колеса повернуты на меньший угол, чем передние. Сам по себе больший радиус поворота означает, что станет меньше перераспределение нагрузок между правыми и левыми колесами, а значит лучше сцепление колес с дорогой и комфорт.
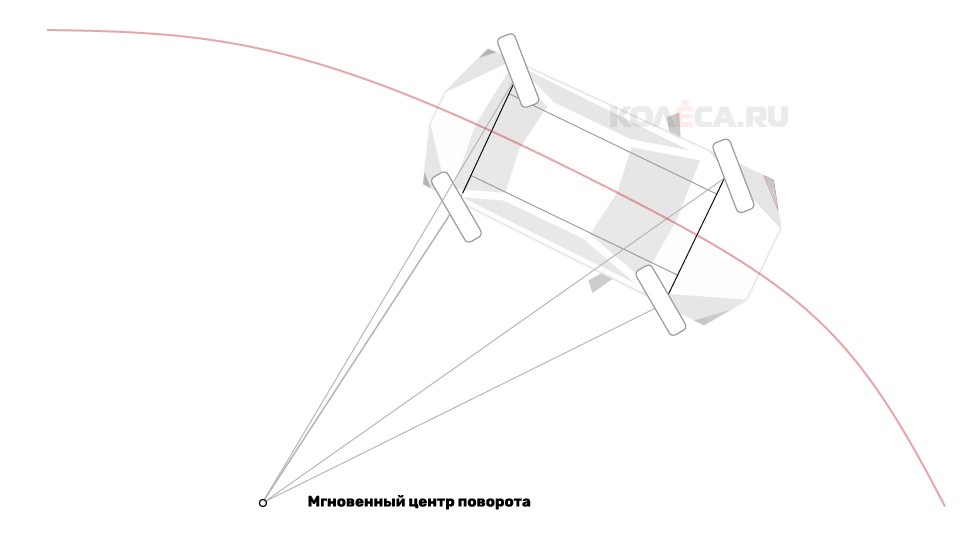
Но, кажется, того же можно добиться, просто повернув руль на меньший угол? Можно это сделать даже автоматически — благо, рулевые механизмы с переменным шагом сейчас не редкость. Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Схожий эффект можно было бы получить простым увеличением колесной базы. Но размеры машин ограничены — зато с помощью изменения угла поворота задних колес можно получить желаемое, не увеличивая габаритов. А для короткобазной машины это просто спасение: можно сохранить сочетание устойчивости на дороге, характерное для больших машин, не отказываясь от хорошей поворачиваемости.
Не только управлением
Для устойчивости на дороге заднее колесо в повороте должно поворачиваться в сторону поворота передних, а для лучшей маневренности – в противоположную. Если с маневренностью особых сложностей нет, то можно использовать для доворота колес особенности движения машины в повороте. Например, наличие крена. При сжатии подвеска будет доворачивать колесо, и мы получим желаемое.
Но тут есть две проблемы. Во-первых, подвеска таким же образом реагирует на изменение нагрузки, а хотелось бы, чтобы управляемость меньше зависела от нагрузки и больше от собственно крена и боковых усилий. Во-вторых, на заднеприводных машинах очень соблазнительно привязать поворот колес к вектору тяги.
Если усложнять подвеску, вводя рычаги, которые воздействуют на углы установки колес при определенной нагрузке, то мы получим многорычажную подвеску. Да, ту самую, которая появилась на Mercedes W201 и сейчас применяется на большинстве машин С-класса и выше. Причем не только на задней оси, но и на передней.
Именно многорычажная подвеска позволила получить тот же эффект, что и принудительный поворот задней оси, и отказаться от применения сложных систем принудительного поворота на четверть века. Система рычагов в такой подвеске задает сложную траекторию движения колеса в зависимости от продольной, поперечной и вертикальной нагрузок.
Можно довольно точно настроить геометрию шасси с учетом того, как машина будет вести себя при появлении значительных боковых сил, при разном соотношении вертикальной и поперечной нагрузок. Для заднеприводных машин это оказалось серьезным подспорьем в борьбе за лучшую управляемость с самого начала, а переднеприводные примерили подобные технологии чуть позже, с ростом массы, нагрузок и требований уже к их управляемости.
Первые полноуправляемые легковушки
Машины с двумя управляемыми осями создавали вовсе не для отличной управляемости. Такие машины вообще не ездили по шоссе на большой скорости, потому что это были вездеходы. Например, знаменитый Unimog – универсальное шасси повышенной проходимости имеет все четыре управляемых колеса. Разумеется, для того, чтобы лучше ехать по бездорожью и маневрировать в ограниченном пространстве.
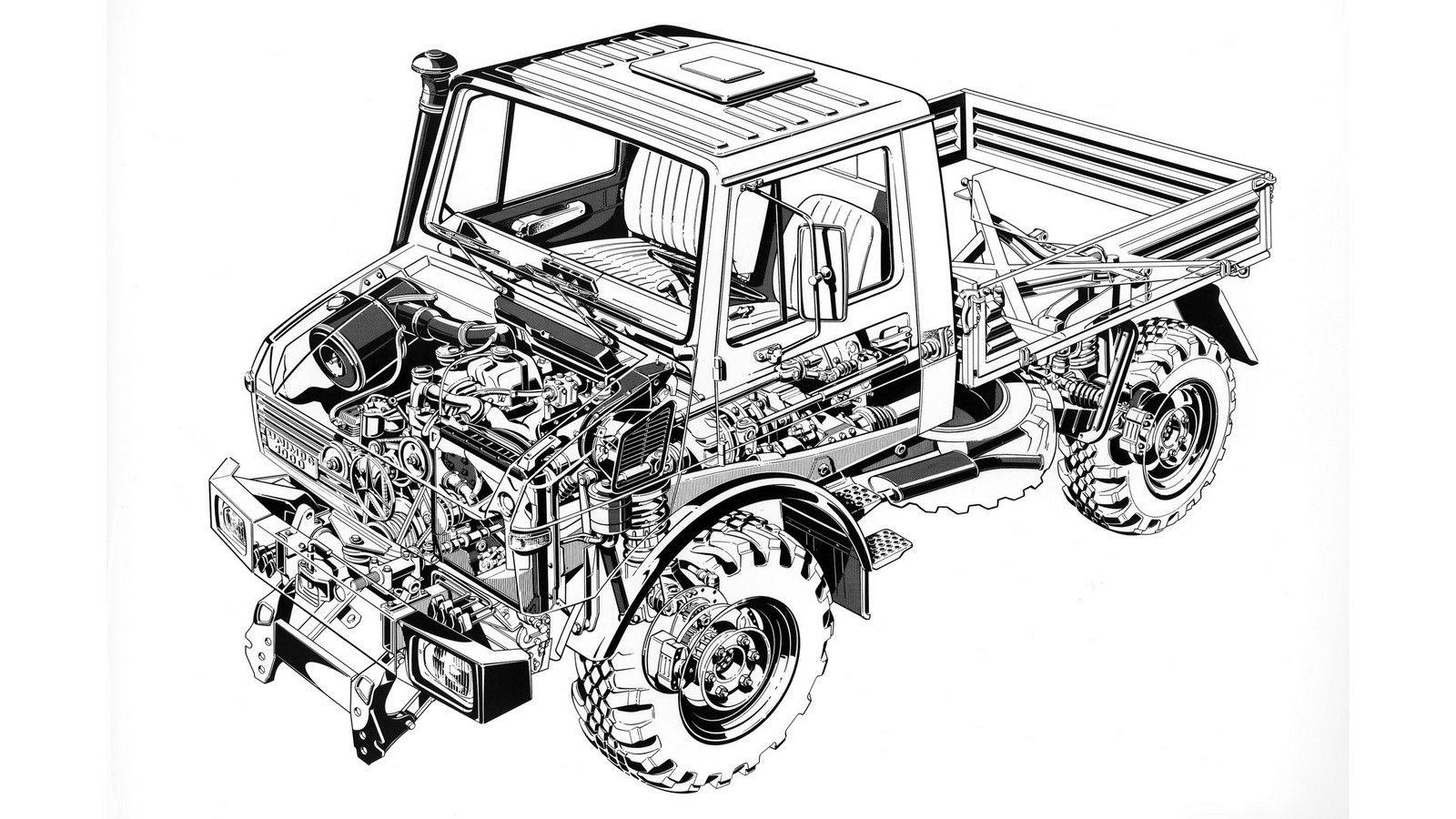
На фото: Mercedes-Benz Unimog U 1000
Японские машины начала 80-х годов по сложности конструкции недалеко от них ушли. На Honda Prelude 1987 года была задняя рулевая рейка и вал, связывающий ее с рулевым колесом, и система работала в зависимости от угла поворота колес. На малых углах поворота задние колеса поворачивались в ту же сторону, что и передние, а при больших — в противоположную. Даже в таком виде эффект оказался достаточным, чтобы подобную технологию внедрили и другие японские производители.

На фото: Honda Prelude 1987
Только на следующих поколениях привод задней рулевой рейки стал уже электрическим, а угол поворота зависел и от скорости, на которой совершался маневр. Впрочем, от валов и рейки избавиться не догадались. Конструкции оставались сложными, массивными, объемными и дорогими. Как итог — машины с ними не снискали особой популярности и продавались только на внутреннем японском рынке. Во всем остальном мире безоговорочное лидерство захватили многорычажные подвески.
Почему снова появляются полноуправляемые шасси
Самый очевидный ответ на этот вопрос — снижение цены на приводные механизмы и электронику управления и развитие систем устойчивости и безопасности. На новом технологическом уровне отказались от задних рулевых трапеций и реек. Многорычажные подвески обеспечивают уже достаточный угол доворота колес для реализации нужного эффекта. Осталось оснастить их вместо рычага, отвечающего за доворот колеса, активным электрическим или гидравлическим приводом.
Электроника куда точнее определяет, что происходит в данный момент с машиной, позволяет использовать большие углы доворота, и к тому же дешевле в настройке, чем сложная подвеска. И как дополнительный фактор – то самое улучшение поворачиваемости на малых скоростях. Можно довернуть колеса в противоположную сторону и улучшить маневренность машины на узких улочках.
Не удивлюсь, если подобные системы в ближайшее время будут массово внедряться на машинах от С-класса и выше, причем в сочетании с упрощенной геометрией задней подвески — например, не с многорычажками, а со скручиваемой балкой. Экономический смысл в этом определенно есть, ведь можно получить управляемость, как у более дорогих машин, при меньших затратах. Да и еще один сложный и дорогой изнашиваемый узел «лишним» не будет. Ведь производители авто, кажется, взяли обязательство сделать машину одноразовой.
Для чего нужна задняя подруливающая подвеска?
На вторичном рынке продается уже достаточное количество автомобилей, имеющих так называемые подруливающие задние колеса. Еще десятилетие назад они считались передовыми и очень перспективными, потому как улучшали маневренность машин и их устойчивость в виражах. Насколько оправдались такие конструкции и стоит ли на них обращать внимание?
Упругие рычаги
Шасси современных машин, в сравнении с восьмидесятыми годами прошлого века , кажется, мало изменилось. Спереди стоит древний МакФерсон, а сзади, как правило, скручиваемая балка. Однако даже эти привычные схемы позволяют заметно перенастраивать шасси и менять поведение машины. Кроме того, почти на все модели именитых фирм в топовых комплектациях идут более совершенные задние многорычажные подвески. Благодаря им даже обычный хэтчбек рулится на автодроме не хуже суперкаров тридцатилетней давности. Главный секрет улучшения характеристик кроется в так называемых подруливающих элементах, которые могут работать как в активном, так и в пассивном режимах.

В первом случае управлением задних колес занимаются электронные блоки, которые разворачивают их одновременно с передними, во втором работа колес осуществляется за счет упругих тяг и рычагов, реагирующих на изменения нагрузок на колесах и компенсирующих искажения в управляемости.
Конструкция пассивной системы подруливания задней подвески состоит из четырёх поперечных тяг (по две на каждое колесо), прикрепленных к корпусу через сайлентблоки, а к ступице посредством шаровых опор. Во время движения они компенсируют инерционные нагрузки. Основную роль в микроскопических подруливаниях колес играют упругие рычаги, закрепленные на передней части ступицы.
Пассивная подруливающая подвеска, такая как на Ford Focus, работает за счет амортизации искривленных рычагов и эластичных резиновых элементов, складывающихся в сложную кинематику с заранее просчитанной деформацией сайлент-блоков. К примеру, при образовании крена автомобиля и возникновении проскальзывания, инерционная нагрузка заставляет рычаг переместиться и подправить ступицу, которая в свою очередь упруго подправляет колесо и снимает возникшую нагрузку на шине. Этот эффект уменьшает стремление автомобиля к заносу и повышает маневренность.

Проблема таких подвесок состоит в высоком износе упругих элементов. На плохих дорогах они выходят из строя уже через 50-70 тысяч км пробега, после чего подвеска резко меняет свои характеристики. Ее элементы уж не могут выдерживать точные узлы, идут искажения, отчего управляемость машины резко снижается. Колеса подруливают не туда, отчего возникают паразитные уводы и искажения. Необходимо перебирать подвеску, а это дорого и долго.
Виртуальная база
Активная подруливающая подвеска намного дороже пассивной и ставится в основном на премиальные автомобили. Она обеспечивает коррекцию задних колес за счет электропривода по команде электронного блока, который использует информацию о положении рулевого колеса. Исполнительный механизм (актуатор) соединен с тягами, которые и меняют углы ступицы. Подобные устройства можно встретить на BMW 5 серии или Mercedes S-класса и т. д.
На маленьких скоростях, до 40 км/час, используется функция маневрирования, когда задние колеса поворачиваются в противоположную от передних сторону, уменьшая радиус разворота. За счет этого достигается эффект уменьшения базы, и длинный автомобиль получает радиус разворота небольшого хэтчбека.

На скоростях более 80 км/час активная подвеска ведет себя по-другому. Задние колеса поворачиваются уже в одну сторону с передними. В этом случае уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. На высоких скоростях это крайне важно, в особенности на скользких дорогах.
Схожий эффект получают увеличением колесной базы, ведь длинный автомобиль всегда стабильнее. Но размеры машин ограничены. Активные элементы помогают виртуально растянуть базу и придать даже небольшому седану плавность хода, свойственную лимузину.
Кроме того, активная подвеска более надежна по сравнению с пассивной. В ней нет большого количества упругих элементов, а управляющая поворотами колес механика может работать долгие годы. Правда при выходе из строя актуаторов или управляющей электроники, автоматика закрепляет колесо в нейтральном положении и подруливающий эффект пропадает.