§ 22.4. Синхронный компенсатор
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки , т. е. в режиме х. х., и привырабатывает реактивную мощность  , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения
, необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения  . Это способствует повышениютехнико-экономических показателей всей электрической системы.
. Это способствует повышениютехнико-экономических показателей всей электрической системы.

Рис. 22.7. Схема включения синхронного
компенсатора (СК) в электрическую систему

Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением  (рис. 22.8,
(рис. 22.8, ) в сети возникает ток
) в сети возникает ток  , отстающий по фазе от напряжения
, отстающий по фазе от напряжения  на угол
на угол  , обусловленный значительной индуктивной составляющей тока
, обусловленный значительной индуктивной составляющей тока .При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8,
.При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8,  ) в сети появится ток
) в сети появится ток  , опережающий по фазе напряжение
, опережающий по фазе напряжение  на угол 90°. Результирующий ток в сети
на угол 90°. Результирующий ток в сети
 (22.1)
(22.1)
Фазовый сдвиг этого тока относительно напряжения сети  (угол
(угол  ) намного меньше угла фазового сдвига до включения СК(угол
) намного меньше угла фазового сдвига до включения СК(угол  ). Кроме того, ток
). Кроме того, ток станет меньше
станет меньше . В этом можноубедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
. В этом можноубедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
 (22.2)
(22.2)
приравнять к активной мощности сети после подключения СК:
 (22.3)
(22.3)
Но так как  , а
, а  , то
, то . В результатесинхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
. В результатесинхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением  = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности
= 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности  = 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до
= 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до  = 0,95 (
= 0,95 ( = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
= 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети  кВ∙Ар, ток нагрузки в сети
кВ∙Ар, ток нагрузки в сети
 А;
А;
активная составляющая этого тока  А.
А.
После включения СК реактивная мощность уменьшилась до
 кВ∙Ар.
кВ∙Ар.
Таким образом, для повышения коэффициента мощности установки от  = 0,7 до
= 0,7 до  = 0,95 требуется включить СК мощностью
= 0,95 требуется включить СК мощностью
 кВ∙Ар.
кВ∙Ар.
При этом активная составляющая тока сети не изменится ( = 97 А), а реактивная составляющая этого тока станет равной
= 97 А), а реактивная составляющая этого тока станет равной
 А.
А.
Следовательно, ток в сети после включения СК
 А.
А.
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ∙Ар, т. е. почти в два раза больше, чем при  = 0,95.
= 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ∙А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет  = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
= 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. ( = 0). Указанные характеристики строят для разных напряжений сети.
= 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность  ) и работает при значении угла
) и работает при значении угла  , что обеспечивает СК большую перегрузочную способность.
, что обеспечивает СК большую перегрузочную способность.
Контрольные вопросы.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Синхронные машины
Синхронной называется электрическая машина, у которой одна совокупность обмоток получает питание от электрической сети переменного тока с постоянной частотой w1, а другая — возбуждается постоянным током (w2=0).
Важное место в теории синхронных машин занимает работа синхронной машины, присоединенной к сети, которая питается мощными генераторами. Исходят из предположения, что общая мощность этих генераторов несоизмеримо велика по сравнению с мощностью синхронной машины (сеть большой мощности).
В соответствии с этим считают, что любое изменение режима работы рассматриваемой машины не в состоянии оказать заметного влияния на электрическое состояние сети.
Синхронная машина, присоединенная к сети, может работать как в режиме генератора, так и в режиме двигателя. В обоих режимах вращение ротора происходит с синхронной скоростью без каких-либо устройств для поддержания синхронизма.
Изучение процессов, имеющих место в синхронной машине, существенно облегчается, если воспользоваться своего рода механической моделью. Трехфазная система токов в обмотке якоря создает вращающееся магнитное поле. Это поле может быть заменено полюсной системой, скользящей вдоль внутренней поверхности статора с постоянной скоростью, равной скорости вращения магнитного поля. Две вращающиеся полюсные системы – ротора и воображаемая, эквивалентная вращающемуся магнитному полю, — неподвижны одна относительно другой. Между ними возникают силы магнитного притяжения, которые могут быть уподоблены упругим связям, соединяющим обе системы. Благодаря этим связям достигается синхронность вращения ротора и магнитного поля. Если будет превышен известный предел нагрузки машины, то произойдет разрыв упругих связей. После этого скорость вращения ротора становится уже не зависящей от скорости вращения магнитного поля. Это явление называется выпадением из синхронизма. Работа синхронной машины в таком режиме невозможна.
Упругие связи между двумя вращающимися полюсными системами могут появиться только в том случае, если обе системы вращаются синхронно. По этой причине пуск синхронного двигателя не может быть произведен прямым включением в сеть. Синхронный двигатель пускается как асинхронный и только после достижения ротором скорости, близкой к синхронной, переводится в синхронный режим. Усложнение процесса пуска является существенным недостатком синхронного двигателя.
Для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска, для чего синхронный двигатель снабжают специальной короткозамкнутой пусковой обмоткой.
Контрольные вопросы
1. Какие системы возбуждения применяют в синхронных машинах? Дайте им сравнительную оценку.
2. Почему в турбогенераторах не применяют роторов явнополюсной конструкции?
3. Из каких участков состоит магнитная цепь явнополюсной синхронной машины?
4. В чем состоит явление реакции якоря?
5. Каковы действия реакции якоря при активной, индуктивной и емкостной нагрузках синхронного генератора?
6. Почему при активной нагрузке синхронного генератора реакция якоря вызывает ослабление магнитного поля?
7. Напишите уравнения ЭДС явнополюсного и неявнополюсного синхронных генераторов и объясните, каким магнитным потоком наводится каждая из этих ЭДС.
8. Почему характеристика к. з. синхронной машины имеет вид прямой линии?
9. Что такое о. к. з. и как влияет этот параметр на свойства синхронного генератора?
10. Что такое номинальное изменение напряжения синхронного генератора и почему при емкостной нагрузке его значение отрицательно?
11. Какие виды потерь имеют место в синхронной машине?
12. Что такое синхронизация генератора, включаемого на параллельную работу?
13. Какие применяются способы синхронизации генераторов? Изложите их содержание.
14. Как нагрузить генератор, включенный в сеть на параллельную работу?
15. Почему с появлением тока в цепи статора генератора приводной двигатель получает механическую нагрузку?
16. Что такое коэффициент статической перегружаемости?
17. Объясните причину собственных колебаний ротора в синхронном генераторе.
18. Почему колебания ротора имеют затухающий характер?
19. Каковы конструкция и назначение успокоительной обмотки в синхронной машине?
20. Что такое синхронизирующая способность синхронной машины и какими параметрами она оценивается?
21. Почему синхронный генератор следует несколько перевозбудить?
22. Почему переходное индуктивное сопротивление больше сверхпереходного?
23. Чем объясняется затухающий характер тока к. з. при внезапном к. з.?
24. Чем опасен режим внезапного к. з. для синхронного генератора?
25. Чем ограничивается область устойчивой работы синхронного двигателя?
26. Почему синхронный двигатель нуждается в специальных способах пуска?
27. Почему при асинхронном пуске синхронного двигателя обмотку возбуждения нельзя оставлять разомкнутой?
28. Каково назначение синхронного компенсатора?
29. Почему при пуске синхронного двигателя с постоянными магнитами возникает тормозной момент?
30. Объясните физическую сущность возникновения реактивного момента.
Как влияет глубина межполюсных впадин на роторе на рабочий и пусковой моменты реактивного двигателя?

Вычисление основной дактилоскопической формулы Вычислением основной дактоформулы обычно занимается следователь. Для этого все десять пальцев разбиваются на пять пар.
Расчетные и графические задания Равновесный объем — это объем, определяемый равенством спроса и предложения.
Кардиналистский и ординалистский подходы Кардиналистский (количественный подход) к анализу полезности основан на представлении о возможности измерения различных благ в условных единицах полезности.

Обзор компонентов Multisim Компоненты – это основа любой схемы, это все элементы, из которых она состоит. Multisim оперирует с двумя категориями.
ОПРЕДЕЛЕНИЕ ЦЕНТРА ТЯЖЕСТИ ПЛОСКОЙ ФИГУРЫ Сила, с которой тело притягивается к Земле, называется силой тяжести.
СПИД: морально-этические проблемы Среди тысяч заболеваний совершенно особое, даже исключительное, место занимает ВИЧ-инфекция.
Понятие массовых мероприятий, их виды Под массовыми мероприятиями следует понимать совокупность действий или явлений социальной жизни с участием большого количества граждан.
Этические проблемы проведения экспериментов на человеке и животных В настоящее время четко определены новые подходы и требования к биомедицинским исследованиям.
Классификация потерь населения в очагах поражения в военное время Ядерное, химическое и бактериологическое (биологическое) оружие является оружием массового поражения.
Факторы, влияющие на степень электролитической диссоциации Степень диссоциации зависит от природы электролита и растворителя, концентрации раствора, температуры, присутствия одноименного иона и других факторов.
Синхронный двигатель и компенсатор
Принципы действия синхронной машины в режиме генератора и двигателя. Значение электромагнитного момента на угловой характеристике синхронного двигателя, способы возникновения магнитной связи между статором и ротором. Назначение синхронного компенсатора.
| Рубрика | Физика и энергетика |
| Вид | контрольная работа |
| Язык | русский |
| Дата добавления | 15.02.2015 |
| Размер файла | 1,4 M |
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Синхронный двигатель и синхронный компенсатор
Принцип действия синхронного двигателя
В соответствии с принципом обратимости электрических машин синхронная машина может работать не только в режиме генератора, но и в режиме двигателя, т. е. потреблять из сети электрическую энергию и преобразовывать ее в механическую.
Для объяснения принципа работы синхронного двигателя представим себе синхронный генератор, включенный на параллельную работу в сеть большой мощности.
Допустим, приводной двигатель вращает ротор генератора против часовой стрелки с угловой скоростью . При этом нагрузка генератора такова, что продольная ось полюсов ротора смещена относительно оси вращающегося поля на угол в направлении вращения ротора (рис. 22.1, справа). Вращающий момент приводного двигателя уравновешивается суммой электромагнитного момента генератора М’ и момента х.х. М0 (). На угловой характеристике этому режиму генератора соответствует точка Г.
Если уменьшать вращающий момент, то нагрузка генератора начнет также уменьшаться, при этом будет уменьшаться угол , а следовательно, и ток статора ). В итоге снизится величина электромагнитного момента М’ и при вращающем моменте угол , т. е. генератор будет работать в режиме х. х. ( = 0) и ЭДС генератора Е0 окажется в противофазе с напряжением сети . Этому режиму на угловой характеристике соответствует точка пересечения осей координат (точка О на рис. 22.1). Если же вал синхронной машины отсоединить от приводного двигателя и создать на этом валу тормозной момент, т.е. момент нагрузки М2, направленный встречно вращению ротора машины, то произойдет смещение вектора ЭДС на угол — относительно его положения в режиме х. х. в сторону отставания (рис. 22.1, слева). При этом в цепи обмотки статора появится результирующая ЭДС , которая создаст в обмотке статора ток , отстающий по фазе от ЭДС на угол 90° (предполагается ) и отстающий по фазе от напряжения сети е на угол (в генераторном режиме ток , отстает по фазе от ЭДС Е0 на угол ).
Рис. 22.1. Переход синхронной машины из генераторного режима в двигательный
Рис. 22.2. Угловая характеристика синхронного двигателя
Ток создает магнитное поле, вращающееся синхронно с ротором, ось которого смещена относительно продольной оси полюсов ротора на угол — . Допустим, работа двигателя происходит в режиме точки Д на угловой характеристике (рис. слева), что соответствует углу — . Возникшие при этом тангенциальные составляющие сил магнитного взаимодействия полюсов создадут на роторе двигателя электромагнитный момент М», направленный согласно с вращающим магнитным полем и приводящий ротор во вращение с синхронной частотой . При этом синхронная машина будет потреблять из сети электрическую энергию и преобразовывать ее в механическую энергию вращения. Вращающий электромагнитный момент М» преодолевает момент х. х. и создает на валу двигателя полезный момент , под действием которого приводится во вращение исполнительный механизм:
Все значения момента на угловой характеристике синхронного двигателя откладываются в отрицательном направлении оси ординат, так как при переходе синхронной машины из генераторного режима в двигательный электромагнитный момент меняет свое направление. Также отрицательной становится мощность синхронного двигателя, которая поступает из сети в машину, а не из машины в сеть, как это происходит в генераторном режиме. Оперирование с отрицательными значениями мощностей и моментов крайне неудобно, поэтому при рассмотрении синхронных двигателей условно будем принимать моменты и мощности положительными, помня при этом изложенное ранее о направлении этих параметров.
Электромагнитная мощность синхронного двигателя определяется выражениями (2 1 .7) и (2 1 .8), а электромагнитный момент — (2 1.9) и (2 1.10).
Угловые характеристики электромагнитного момента и его составляющих и представлены на рис. 22.2. Эти характеристики отличаются от угловых характеристик генератора (см. рис. 21.5) лишь тем, что располагаются в третьем квадранте осей координат, т. е. определяются отрицательными значениями углов и моментов и а также момента при .
Таким образом, в общем виде угловая характеристика синхронной машины представляет собой две полуволны результирующего момента М: положительную, соответствующую генераторному режиму работы (см. рис. 21.5), и отрицательную, соответствующую двигательному режиму работы (рис. 22.2). Переход машины из одного режима работы в другой происходит при .
Устойчивая работа синхронного двигателя соответствует участку угловой характеристики (рис. 22.2) при .
Отношение максимального электромагнитного момента к номинальному [см. (21.16)] определяет перегрузочную способность синхронного двигателя
Обычно перегрузочная способность синхронных двигателей , что при номинальной нагрузке двигателя соответствует эл. град.
Ротор синхронного двигателя может вращаться только с синхронной частотой . Чтобы убедиться в этом, достаточно предположить, что ротор двигателя начнет вращаться с частотой . В какой-то момент времени намагниченные полюсы ротора расположатся против одноименных полюсов вращающегося магнитного поля статора и тогда нарушится магнитная связь между намагниченными полюсами ротора и полюсами вращающегося поля статора, так как их одноименные полюсы будут взаимно отталкиваться и ротор, перестав испытывать устойчивое действие вращающего электромагнитного момента, остановится.
Вращение ротора синхронных двигателей только с синхронной частотой составляет характерную особенность этих двигателей и часто определяет область их применения (например, для привода устройств, требующих стабильной частоты вращения).
При изменениях нагрузки на валу синхронного двигателя меняется угол . При этом ротор вследствие инерции вращающихся масс агрегата не сразу занимает положения, соответствующие новой нагрузке, а некоторое время совершает колебательные движения. Таким образом, в синхронном двигателе, так же как и в генераторе, имеют место колебания (физическая сущность этого явления изложена в § 21.4).
По своей конструкции синхронные двигатели в принципе не отличаются от синхронных генераторов, но все же имеют некоторые особенности. Их изготовляют преимущественно явнополюсными с полюсов; воздушный зазор делают меньшим, чем в генераторах такой же мощности, что способствует улучшению ряда параметров двигателя, в частности уменьшению пускового тока; демпферную (успокоительную) обмотку выполняют стержнями большего сечения, так как при пуске двигателя она является пусковой обмоткой (см. § 22.2); ширина полюсного наконечника достигает вместо в генераторах. Поэтому, несмотря на свойство обратимости, синхронные машины, выпускаемые промышленностью, имеют обычно целевое назначение — либо это синхронные генераторы, либо синхронные двигатели.
Пуск синхронных двигателей
Пуск синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, частота вращения которого устанавливается мгновенно. В результате устойчивая магнитная связь между статором и ротором не возникает. Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до синхронной или близкой к ней частоте, при которой между статором и ротором устанавливается устойчивая магнитная связь.
В настоящее время практическое применение имеет способ пуска, получивший название асинхронного. Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки), аналогичной успокоительной обмотке синхронного генератора (см. рис. 21.8). Схема включения двигателя при этом способе пуска приведена на рис. 22.3, а. Невозбужденный синхронный двигатель включают в сеть. Возникшее при этом вращающееся магнитное поле статора наводит в стержнях пусковой клетки ЭДС, которые создают токи .
Рис. 22.3. Асинхронный пуск синхронного двигателя
Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил . Под действием этих сил ротор приводится во вращение (рис. 22.3, б). После разгона ротора до частоты вращения, близкой к синхронной , обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент [см. (21.10)] втягиваем ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора (см. § 21.4).
Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Явнополюсные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т. е. даже без включения обмотки возбуждения.
С увеличением нагрузочного момента на валу вхождение двигателя в синхронизм затрудняется. Наибольший нагрузочный момент, при котором ротор синхронного двигателя еще втягивается и синхронизм, называют моментом входа двигателя в синхронизм . Величина асинхронного момента при частоте вращения зависит от активного сопротивления пусковой клетки, т. е. от сечения стержней и удельного электрического сопротивления металла, из которого они изготовлены (см. рис. 13.).
Следует обратить внимание, что выбор сопротивления пусковой клетки , соответствующего значительному пусковому моменту , способствует уменьшению момента входа в синхронизм и, наоборот, при сопротивлении , соответствующем небольшому пусковому моменту (), момент входа в синхронизм увеличивается (рис. 22.4).
Рис. 22.4. Асинхронные моменты при пуске синхронного двигателя:
, — основной момент;
— момент входа в синхронизм
В процессе асинхронного пуска обмотку возбуждения нельзя оставлять разомкнутой, так как магнитный поток статора, пересекающий ее в начальный период пуска с синхронной скоростью, наводит в ней ЭДС. Вследствие большого числа витков обмотки возбуждения эта ЭДС достигает значений, опасных как для целости изоляции самой обмотки, так и для обслуживающего персонала. Для предотвращения этого обмотку возбуждения на период разгона ротора замыкают на активное сопротивление , примерно в десять раз большее сопротивления обмотки возбуждения. Переключение зажимов И1 и И2 обмотки возбуждения с сопротивления на зажимы возбудителя осуществляют переключателем П (см. рис. 22.3, а).
Замыкание накоротко обмотки возбуждения на время пускания двигателя нежелательно, так как при этом обмотка ротора образует однофазный замкнутый контур, взаимодействие которого с вращающимся полем статора также создает дополнительный асинхронный момент . Однако при частоте вращения, равной половине синхронной, этот момент становится тормозящим (рис. 22.4) и создает «провал» в характеристике пускового (асинхронного) момента (пунктирная кривая). Это заметно ухудшает пусковые свойства синхронного двигателя.
При асинхронном пуске синхронного двигателя возникает значительный пусковой ток. Поэтому пуск синхронных двигателей непосредственным включением в сеть на номинальное напряжение применяют при достаточной мощности сети, способной выдерживать без заметного падения напряжения броски пускового тока пяти- или семикратного значения (по сравнению с номинальным током). Если же мощность сети недостаточна, то можно применить пуск двигателя при пониженном напряжении (см. § 15.2): автотрансформаторный или реакторный.
U-образные и рабочие характеристики синхронного двигателя
U-образные характеристики. В процессе работы синхронного двигателя в его обмотке статора наводятся ЭДС, сумма которых [см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети . Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения и статора .
При неизменном напряжении сети результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения (изменении тока возбуждения ) МДС статора изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС может происходить только за счет изменения величины и фазы тока статора , т. е. за счет изменения реактивной составляющей тока статора .
Например, при увеличении тока возбуждения начиная от наименьшего его значения возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети ) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
При этом полный ток статора уменьшается, а коэффициент мощности двигателя , увеличивается. При некотором значении тока возбуждения индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным , а коэффициент мощности, = 1.
Увеличение тока возбуждения сверх значения , т. е. перевозбуждение двигателя, вызовет увеличение тока , но теперь этот ток будет опережающим (емкостным) по отношению к напряжению . Таким образом, при недовозбужденш синхронный двигатель работает с отстающим током, а при перевозбуждении — с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
Иначе говоря, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок.
Асинхронные двигатели, являющиеся наиболее распространенными потребителями электроэнергии, работают с < 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с , что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с = 1, когда ток статора и потери двигателя имеют минимальные значения.
Аналогично синхронному генератору, включенному на параллельную работу с сетью (см. § 21.6), синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 22.5).
Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимость частоты вращения ротора , потребляемой мощности , полезного момента , коэффициента мощности , и тока в обмотке статора от полезной мощности двигателя (рис. 22.). Частота вращения ротора всегда равна синхронной частоте , поэтому график имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя . Так как рабочие характеристики снимают при условии , то график имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя . С ростом нагрузки на валу двигателя увеличиваются также и потери , поэтому потребляемая мощность растет быстрее полезной мощности и график имеет несколько криволинейный вид.
Рис. 22.5 U-образные характеристики синхронного двигателя
Рис. 22.6. Рабочие характеристики синхронного двигателя
Вид графика зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что = 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22.). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
Ток в обмотке статора двигателя . Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора (см. § 9.3).
В заключение необходимо отметить, что синхронные двигатели по сравнению с асинхронными имеют преимущество, заключающееся в том, что они могут работать с = 1, не создавая в щей сети индуктивных токов, вызывающих дополнительные потери энергии. Более того, при работе с перевозбуждением синхронные двигатели создают в сети емкостный ток, чем способствуют повышению коэффициента мощности энергосистемы в целом. Другое достоинство синхронных двигателей состоит в том, что, как это следует из (21.11), основная составляющая электромагнитного момента пропорциональна напряжению сети , а у асинхронных двигателей электромагнитный момент пропорционален [см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения.
Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.).
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки , т. е. в режиме х. х., и при вырабатывает реактивную мощность , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения . Это способствует повышению технико-экономических показателей всей электрической системы.
Рис. 22.7. Схема включения синхронного компенсатора (СК) в электрическую систему
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением (рис. 22.8, ) в сети возникает ток , отстающий по фазе от напряжения на угол , обусловленный значительной индуктивной составляющей тока . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, ) в сети появится ток , опережающий по фазе напряжение на угол 90°. Результирующий ток в сети
Фазовый сдвиг этого тока относительно напряжения сети (угол ) намного меньше угла фазового сдвига до включения СК (угол ). Кроме того, ток станет меньше . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
приравнять к активной мощности сети после подключения СК:
Но так как , а , то . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности = 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до = 0,95 ( = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети кВ•Ар, ток нагрузки в сети
активная составляющая этого тока А.
После включения СК реактивная мощность уменьшилась до
Таким образом, для повышения коэффициента мощности установки от = 0,7 до = 0,95 требуется включить СК мощностью
При этом активная составляющая тока сети не изменится ( = 97 А), а реактивная составляющая этого тока станет равной
Следовательно, ток в сети после включения СК
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ•Ар, т. е. почти в два раза больше, чем при = 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ•А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой. синхронный двигатель компенсатор статор
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. (= 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность ) и работает при значении угла , что обеспечивает СК большую перегрузочную способность.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Размещено на Allbest.ru
Подобные документы
Пуск синхронного компенсатора, представляющей собой синхронный двигатель облегчённой конструкции, предназначенный для работы на холостом ходу. Защита от замыканий на землю в одной точке цепи возбуждения компенсатора. Схема защиты минимального напряжения.
реферат [309,0 K], добавлен 07.12.2016
Устройство асинхронной машины: статор и вращающийся ротор. Механическая характеристика асинхронного двигателя, его постоянные и переменные потери. Методы регулирования частоты вращения двигателя. Работа синхронного генератора в автономном режиме.
презентация [9,7 M], добавлен 06.03.2015
Принцип действия вертикального синхронного двигателя. Конструкция крестовин и вала. Расчет сердечника статора. Синтез и оптимизация электромагнитного ядра на персональном компьютере. Оценка резервов мощности серии вертикальных синхронных двигателей.
курсовая работа [2,5 M], добавлен 11.10.2012
Расчет и обоснование номинальной величины асинхронного двигателя. Размеры и зубцовая зона статора. Воздушный зазор и полюса ротора. Определение основных паромеров магнитной цепи. Превышение температуры обмотки статора. Характеристики синхронной машины.
курсовая работа [585,7 K], добавлен 21.02.2016
Назначение, описание конструкции и системы возбуждения вертикального синхронного двигателя. Конструкция корпуса, сердечника и обмотки статора, ротора, крестовин и вала, системы возбуждения. Расчет электромагнитного ядра и его оптимизация на ЭВМ.
U –образные и рабочие характеристики синхронного двигателя
U -образные характеристики. В процессе работы синхронного двигателя в его обмотке статора наводятся ЭДС, сумма которых  [см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети
[см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети  . Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения
. Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения  и статора
и статора  .
.
При неизменном напряжении сети  результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения
результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения  (изменении тока возбуждения
(изменении тока возбуждения  ) МДС статора
) МДС статора  изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС
изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС  может происходить только за счет изменения величины и фазы тока статора
может происходить только за счет изменения величины и фазы тока статора  , т. е. за счет изменения реактивной составляющей тока статора
, т. е. за счет изменения реактивной составляющей тока статора  .
.
Например, при увеличении тока возбуждения начиная от наименьшего его значения  возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети
возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети  ) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
При этом полный ток статора  уменьшается, а коэффициент мощности двигателя
уменьшается, а коэффициент мощности двигателя  , увеличивается. При некотором значении тока возбуждения
, увеличивается. При некотором значении тока возбуждения  индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным
индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным  , а коэффициент мощности, = 1.
, а коэффициент мощности, = 1.
Увеличение тока возбуждения сверх значения , т. е. пере возбуждение двигателя, вызовет увеличение тока  , но теперь этот ток будет опережающим (емкостным) по отношению к напряжению
, но теперь этот ток будет опережающим (емкостным) по отношению к напряжению  . Таким образом, при недовозбужденш
. Таким образом, при недовозбужденш  синхронный двигатель работает с отстающим током, а при перевозбуждении
синхронный двигатель работает с отстающим током, а при перевозбуждении  — с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
— с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
Иначе говоря, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок.
Асинхронные двигатели, являющиеся наиболее распространенными потребителями электроэнергии, работают с  < 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с
< 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с  , что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с = 1, когда ток статора и потери двигателя имеют минимальные значения.
, что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с = 1, когда ток статора и потери двигателя имеют минимальные значения.
Аналогично синхронному генератору, включенному на параллельную работу с сетью (см. § 21.6), синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 22.5).
Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимость частоты вращения ротора  , потребляемой мощности
, потребляемой мощности  , полезного момента
, полезного момента  , коэффициента мощности , и тока в обмотке статора
, коэффициента мощности , и тока в обмотке статора  от полезной мощности двигателя
от полезной мощности двигателя  (рис. 22.
(рис. 22.  ). Частота вращения ротора всегда равна синхронной частоте
). Частота вращения ротора всегда равна синхронной частоте  , поэтому график
, поэтому график  имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя
имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя  . Так как рабочие характеристики снимают при условии
. Так как рабочие характеристики снимают при условии  , то график
, то график  имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя
имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя  . С ростом нагрузки на валу двигателя увеличиваются также и потери
. С ростом нагрузки на валу двигателя увеличиваются также и потери  , поэтому потребляемая мощность
, поэтому потребляемая мощность  растет быстрее полезной мощности и график
растет быстрее полезной мощности и график  имеет несколько криволинейный вид.
имеет несколько криволинейный вид.

Рис. 22.5 U-образные характеристики синхронного двигателя
Рис. 22.6. Рабочие характеристики синхронного двигателя
Вид графика  зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что
зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что  = 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22. ). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке
= 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22. ). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке  и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
Ток в обмотке статора двигателя  . Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
. Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора (см. § 9.3).
В заключение необходимо отметить, что синхронные двигатели по сравнению с асинхронными имеют преимущество, заключающееся в том, что они могут работать с = 1, не создавая в щей сети индуктивных токов, вызывающих дополнительные потери энергии. Более того, при работе с перевозбуждением синхронные двигатели создают в сети емкостный ток, чем способствуют повышению коэффициента мощности энергосистемы в целом. Другое достоинство синхронных двигателей состоит в том, что, как это следует из (21.11), основная составляющая электромагнитного момента пропорциональна напряжению сети  , а у асинхронных двигателей электромагнитный момент пропорционален
, а у асинхронных двигателей электромагнитный момент пропорционален  [см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
[см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения.
Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.).
Синхронный компенсатор
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки  , т. е. в режиме х. х., и при вырабатывает реактивную мощность
, т. е. в режиме х. х., и при вырабатывает реактивную мощность  , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения
, необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения  . Это способствует повышению технико-экономических показателей всей электрической системы.
. Это способствует повышению технико-экономических показателей всей электрической системы.
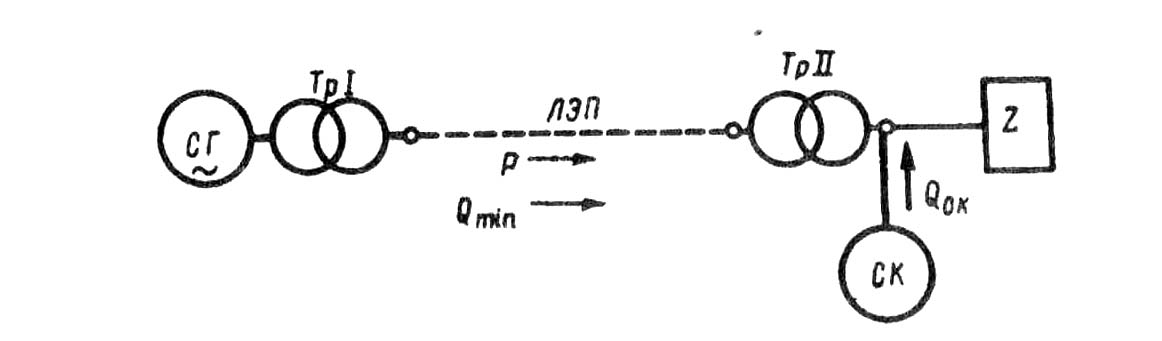
Рис. 22.7. Схема включения синхронного
компенсатора (СК) в электрическую систему

Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением (рис. 22.8,  ) в сети возникает ток
) в сети возникает ток  , отстающий по фазе от напряжения
, отстающий по фазе от напряжения  на угол
на угол  , обусловленный значительной индуктивной составляющей тока
, обусловленный значительной индуктивной составляющей тока  . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, )в сети появится ток
. При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, )в сети появится ток  , опережающий по фазе напряжение
, опережающий по фазе напряжение  на угол 90°. Результирующий ток в сети
на угол 90°. Результирующий ток в сети
 (22.1)
(22.1)
Фазовый сдвиг этого тока относительно напряжения сети  (угол
(угол  ) намного меньше угла фазового сдвига до включения СК (угол
) намного меньше угла фазового сдвига до включения СК (угол  ). Кроме того, ток
). Кроме того, ток  станет меньше
станет меньше  . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
. В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
 (22.2)
(22.2)
приравнять к активной мощности сети после подключения СК:
 (22.3)
(22.3)
Но так как  , а
, а  , то
, то  . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
. В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением  = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности
= 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности  = 0,7. Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до
= 0,7. Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до  = 0,95 (
= 0,95 (  = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
= 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети  кВ∙Ар, ток нагрузки в сети
кВ∙Ар, ток нагрузки в сети
 А;
А;
активная составляющая этого тока  А.
А.
После включения СК реактивная мощность уменьшилась до
 кВ∙Ар.
кВ∙Ар.
Таким образом, для повышения коэффициента мощности установки от  = 0,7 до
= 0,7 до  = 0,95 требуется включить СК мощностью
= 0,95 требуется включить СК мощностью
 кВ∙Ар.
кВ∙Ар.
При этом активная составляющая тока сети не изменится (  = 97 А), а реактивная составляющая этого тока станет равной
= 97 А), а реактивная составляющая этого тока станет равной
 А.
А.
Следовательно, ток в сети после включения СК
 А.
А.
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ∙Ар, т. е. почти в два раза больше, чем при  = 0,95.
= 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ∙А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет  = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
= 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. (  = 0). Указанные характеристики строят для разных напряжений сети.
= 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность  ) и работает при значении угла
) и работает при значении угла  , что обеспечивает СК большую перегрузочную способность.
, что обеспечивает СК большую перегрузочную способность.
Контрольные вопросы.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?