2.6 Передаточные функции
Преобразование ДУ по Лапласу дает возможность ввести удобное понятие передаточной функции, характеризующей динамические свойства системы.
Например, операторное уравнение
3s 2 Y(s) + 4sY(s) + Y(s) = 2sX(s) + 4X(s)
можно преобразовать, вынеся X(s) и Y(s) за скобки и поделив друг на друга:
Y(s)*(3s 2 + 4s + 1) = X(s)*(2s + 4)
.
Полученное выражение называется передаточной функцией.
Передаточной функцией называется отношение изображения выходного воздействия Y(s) к изображению входного X(s) при нулевых начальных условиях.
 (2.4)
(2.4)
Передаточная функция является дробно-рациональной функцией комплексной переменной:
 ,
,
где B(s) = b0 + b1s + b2 s 2 + … + bm s m — полином числителя,
А(s) = a0 + a1s + a2 s 2 + … + an s n — полином знаменателя.
Передаточная функция имеет порядок, который определяется порядком полинома знаменателя (n).
Из (2.4) следует, что изображение выходного сигнала можно найти как
Так как передаточная функция системы полностью определяет ее динамические свойства, то первоначальная задача расчета АСР сводится к определению ее передаточной функции.
2.6.2 Примеры типовых звеньев
Звеном системы называется ее элемент, обладающий определенными свойствами в динамическом отношении. Звенья систем регулирования могут иметь разную физическую природу (электрические, пневматические, механические и др. звенья), но описываться одинаковыми ДУ, а соотношение входных и выходных сигналов в звеньях описываться одинаковыми передаточными функциями.
В ТАУ выделяют группу простейших звеньев, которые принято называть типовыми. Статические и динамические характеристики типовых звеньев изучены достаточно полно. Типовые звенья широко используются при определении динамических характеристик объектов управления. Например, зная переходную характеристику, построенную с помощью самопишущего прибора, часто можно определить, к какому типу звеньев относится объект управления, а следовательно, его передаточную функцию, дифференциальное уравнение и т.д., т.е. модель объекта. Типовые звенья Любое сложное звено может быть представлено как соединение простейших звеньев.
К простейшим типовым звеньям относятся:
инерционное (апериодическое 1-го порядка),
интегрирующие (реальное и идеальное),
дифференцирующие (реальное и идеальное),
апериодическое 2-го порядка,
1) Усилительное звено.
 Звено усиливает входной сигнал в К раз. Уравнение звена у = К*х, передаточная функцияW(s) = К. Параметр К называется коэффициентом усиления.
Звено усиливает входной сигнал в К раз. Уравнение звена у = К*х, передаточная функцияW(s) = К. Параметр К называется коэффициентом усиления.
Выходной сигнал такого звена в точности повторяет входной сигнал, усиленный в К раз (см. рисунок 1.18).
При ступенчатом воздействии h(t) = K.
Примерами таких звеньев являются: механические передачи, датчики, безынерционные усилители и др.
2) Интегрирующее.
2.1) Идеальное интегрирующее.
Выходная величина идеального интегрирующего звена пропорциональна интегралу входной величины:
 ; W(s) =
; W(s) = 
При подаче на вход звена ступенчатого воздействия x(t) = 1 выходной сигнал постоянно возрастает (см. рисунок 1.19):
Это звено астатическое, т.е. не имеет установившегося режима.
Примером такого звена может служить емкость, наполняемая жидкостью. Входной параметр – расход поступающей жидкости, выходной — уровень. Изначально емкость пуста и при отсутствии расхода уровень равен нулю, но если включить подачу жидкости, уровень начинает равномерно увеличиваться.
2.2) Реальное интегрирующее.
П ередаточная функция этого звена имеет вид
ередаточная функция этого звена имеет вид
W(s) =  .
.
Переходная характеристика в отличие от идеального звена является кривой (см. рис. 1.20):
h(t) = K . (t – T) + K . T . e — t / T .
Примером интегрирующего звена является двигатель постоянного тока с независимым возбуждением, если в качестве входного воздействия принять напряжение питания статора, а выходного — угол поворота ротора. Если напряжение на двигатель не подается, то ротор не двигается и угол его поворота можно принять равным нулю. При подаче напряжения ротор начинает раскручиваться, а угол его поворота сначала медленно вследствие инерции, а затем быстрее увеличиваться до достижения определенной скорости вращения.
3) Дифференцирующее.
3.1) Идеальное дифференцирующее.
Выходная величина пропорциональна производной по времени от входной:
 ; W(s) = K*s
; W(s) = K*s
При ступенчатом входном сигнале выходной сигнал представляет собой импульс (-функцию): h(t) = K . (t).
3.2) Реальное дифференцирующее.
 Идеальные дифференцирующие звенья физически не реализуемы. Большинство объектов, которые представляют собой дифференцирующие звенья, относятся к реальным дифференцирующим звеньям, передаточные функции которых имеют вид
Идеальные дифференцирующие звенья физически не реализуемы. Большинство объектов, которые представляют собой дифференцирующие звенья, относятся к реальным дифференцирующим звеньям, передаточные функции которых имеют вид
W(s) =  .
.
Переходная характеристика:  .
.
Пример звена: электрогенератор. Входной параметр – угол поворота ротора, выходной – напряжение. Если ротор повернуть на некоторый угол, то на клеммах появится напряжение, но если ротор далее не вращать, напряжение снизится до нуля. Резко упасть оно не может вследствие наличия индуктивности у обмотки.
4) Апериодическое (инерционное).
Этому звену соответствуют ДУ и ПФ вида
 ; W(s) =
; W(s) =  .
.
Определим характер изменения выходной величины этого звена при подаче на вход ступенчатого воздействия величины х0.
Изображение ступенчатого воздействия: X(s) =  . Тогда изображение выходной величины:
. Тогда изображение выходной величины:
Y(s) = W(s) X(s) = 
 = K x0
= K x0  .
.
Разложим дробь на простые:
 =
=  +
+  =
=  =
=  —
—  =
=  —
— 
Оригинал первой дроби по таблице: L -1 < > = 1, второй:
> = 1, второй:
L -1 < > =
> =  .
.
 Тогда окончательно получаем
Тогда окончательно получаем
y(t) = K x0 (1 —  ).
).
Постоянная Т называется постоянной времени.
Большинство тепловых объектов являются апериодическими звеньями. Например, при подаче на вход электрической печи напряжения ее температура будет изменяться по аналогичному закону (см. рисунок 1.22).
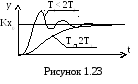
5) Звенья второго порядка
Звенья имеют ДУ и ПФ вида
 ,
,
W(s) = 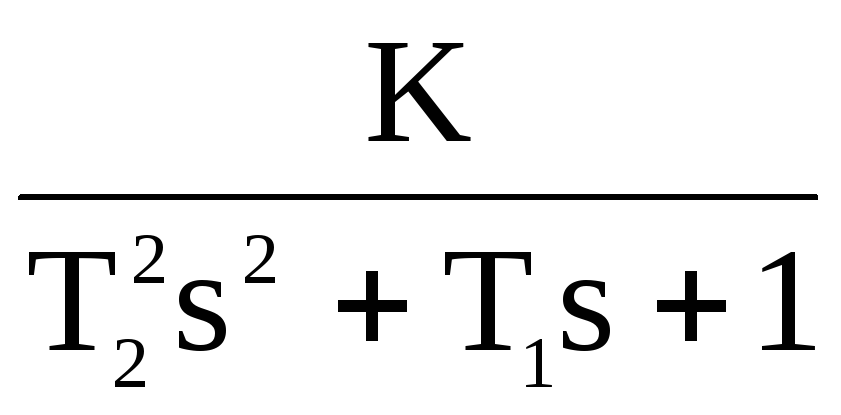 .
.
При подаче на вход ступенчатого воздействия амплитудой х0 переходная кривая будет иметь один из двух видов: апериодический (при Т1 2Т2) или колебательный (при Т1 < 2Т2).
В связи с этим выделяют звенья второго порядка:
апериодическое 2-го порядка (Т1 2Т2),
консервативное (Т1 = 0).
6) Запаздывающее.
Если при подаче на вход объекта некоторого сигнала он реагирует на этот сигнал не моментально, а спустя некоторое время, то говорят, что объект обладает запаздыванием.
Запаздывание – это интервал времени от момента изменения входного сигнала до начала изменения выходного.
Запаздывающее звено – это звено, у которого выходная величина у в точности повторяет входную величину х с некоторым запаздыванием :
Передаточная функция звена:
Примеры запаздываний: движение жидкости по трубопроводу (сколько жидкости было закачано в начале трубопровода, столько ее выйдет в конце, но через некоторое время, пока жидкость движется по трубе), движение груза по конвейеру (запаздывание определяется длиной конвейера и скоростью движения ленты) и т.д.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР)
Продолжаем публикацию лекций по курсу «Управление в Технических Системах» автор — Олег Степанович Козлов на кафедре Э7 МГТУ им. Н.Э. Баумана.
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
Будет как всегда позновательной увлекательно и жестко
5.1. Главная передаточная функция. Передаточные функции по возмущающему воздействию и для ошибки (рассогласования)
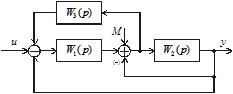
Используя структурные преобразования (см. раздел 4), структурную схему практически любой линейной или линеаризованной САР (САУ) можно привести к виду:
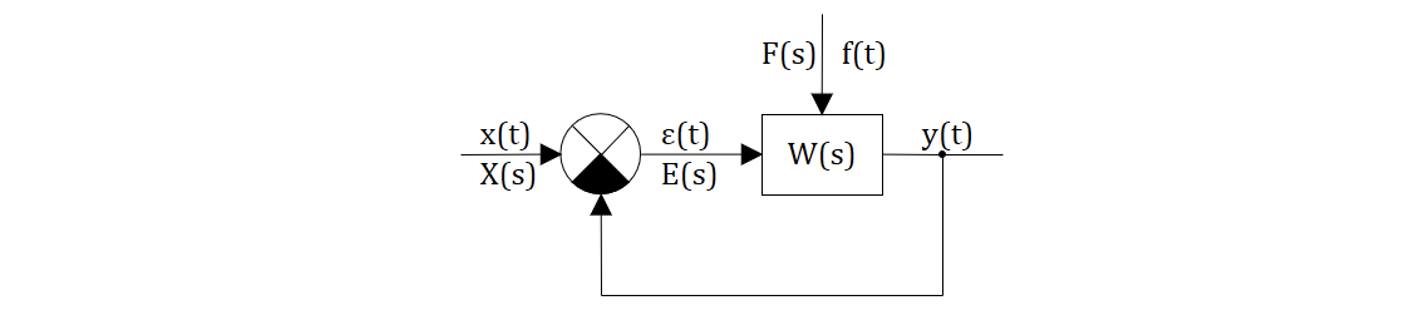
Рисунок 5.1.1 Типовая струкутура САР
Где функции по времени:
– регулируемая величина (выходное воздействие);
Или в изображениях:
Определение: Если единичная обратная связь охватывает все элементы (звенья) САР – она называется главной.
Определение: Если главная обратная связь отсутствует — САР считается разомкнутой.
Передаточная функция может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
Возмущающих воздействий может быть несколько и приложены они могут быть в любом месте структурной схемы.
Передаточную функцию которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):
где – общий коэффициент усиления; – полиномы по степеням переменной , причем свободные члены в них равны 1 (единице).
Учитывая, что САР линейна или линеаризована, разделим на структурной схеме каналы прохождения управляющего и возмущающего воздействий. Выделим в отдельное звено (может быть и очень сложное) ту часть системы, через которую проходит возмущающее воздействие обозначим ее через Структурная схема САР принимает вид:

Рисунок 5.1.2 Структурная схема общего вида с передаточной функцией и внешним воздействием
В Теории Управления используют 3 основных передаточных функций замкнутой САР:
главная передаточная функция ;
передаточная функция по возмущающему воздействию ;
передаточная функция для ошибки (рассогласования)
Рассмотрим более подробно вышеупомянутые передаточные функции.
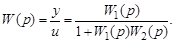
Главная передаточная функция
Главная передаточная функция -передаточная функция по управляющему воздействию математическое определение этой передаточной функции:
выведем формулу при условии если возмущеющие воздействие равно . «Обойдем» структурную схемв по контуру:
Примечание. Формула (5.3) совпадает с формулой для передаточной функции цепи с местной единичной обратной связью (см. раздел 4 – «Структурные преобразования»).
Подставляя вместо ее выражение через полиномы и
Анализ выражения (5.4) показывает, что свойства главной передаточной функции замкнутой САР однозначно определяются свойствами разомкнутой САР, т.е. через полиномы и .
Передаточная функция замкнутой САР по внешнему возмущающему воздействию
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействи , а возмущеющие воздействие отличное от нуля . В этом случае (см. рисунок 5.1.2) получается:
Перрейдем к изображением и «обойдем» схему (см. рис. 5.1.2) по контуру
Подставляя вместо ее выражение через полиномы и получаем:
где: — вид данного полинома зависит от места приложения возмущающего воздействия;
Формулы 5.4 и 5.6 имеют общий занаменатель
Передаточная функция замкнутой САР для ошибки (рассогласования)
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействиt отлично от 0 , а возмущеющие воздействие равно 0 . В этом случае для передаточной функции получается (см. рис. 5.1.2):
Сделаем вывод соответствующих формул, выполнив «обход» по контуру схемы (см. рис. 5.1.2)
Учитывая формулу для главной передаточной функции можно записать выражения для передаточной функции рассоглаосвания:
Подставляя вместо ее выражение через полиномы и получаем:
Опять замечаем, что знаменатель передаточной функции равен полиному следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
В Теории Управления выражение имеет «собственное» название: характеристический полином замкнутой САР.
5.2 Уравнения динамики замкнутой САР
Как указывалось в подразделе 5.1, любую замкнутую САР можно привести к виду представленному на рисунке 5.2.1:
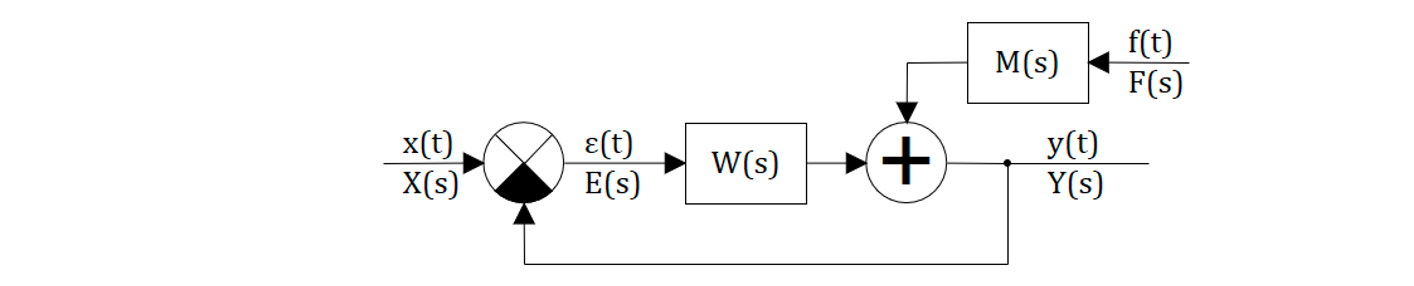
Рисунок 5.2.1 Общая схема замкнутой САР с возмущающим воздействием
Выведены соотношения для 3-х основных передаточных функций замкнутой САР позволяют записать выражения для регулируемой величины в изображениях:
Подставляя значения и через полиномы и разомкнутой САР получаем:
подставим значения для характеристического полинома получим выражение для динамического уравнения замкнутой САР в изображениях:
Переходя к оригиналам получаем символическую форму записи обыкновенного дифференциального уравнения замкнутой САР:
Решение диференциального уравнения состоит из двух частей:
где: — собственная часть, решение однородного дифференциального уравнения ;
— вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
Решения однородного уравнения замкнутой САР:
записываем соответствующее характеристическое уравнение:
находим корни степенного уравнения если все корни уравнения разные:
Обычно находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
Необходимо отметить, что порядок дифференциального уравнения (5.2.3) равен «n», т.е. такой же, как и у разомкнутой САР
если нет возмущающего воздействия, т.к. порядок дифференциального оператора L(p) обычно значительно выше, чем N(p).
По аналогии с выводом уравнения (5.2.3) можно получить уравнение динамики для рассогласования :
подставляя значения и (см. 5.6 и 5.9) получаем:
Уравнение (5.2.5)- уравнение динамики замкнутой САР в ихображениях для рассогласования (ошибки) при наличии управляющего и возмущающего воздействий.
Особенностью данного уравнения (5.2.5) является то, что левая часть его практически совпадает с левой частью (5.2.2), в то время, как порядок правой части заметно выше , т.к. порядок многочленов D (s) и L (s) — одинаков, а порядок N(s) меньше L(s).
Это означает, что внешние воздействия и влияют на более сильным образом.
Дифференциальное уравнение замкнутой САР для ошибки:
Способы решения уравнения ( 5.2.6 ) такие же, как и для уравнения ( 5.2.3 ) .
5.3. Частотные характеристики замкнутой САР.
Наибольший интерес при анализе замкнутых САР имеет АФЧХ замкнутой САР по управляющему воздействию:
где передаточная функция:
Учитывая, что — комплексное число, по аналогии имеем:
Где — вещественная часть функции, — мнимая часть функиции.
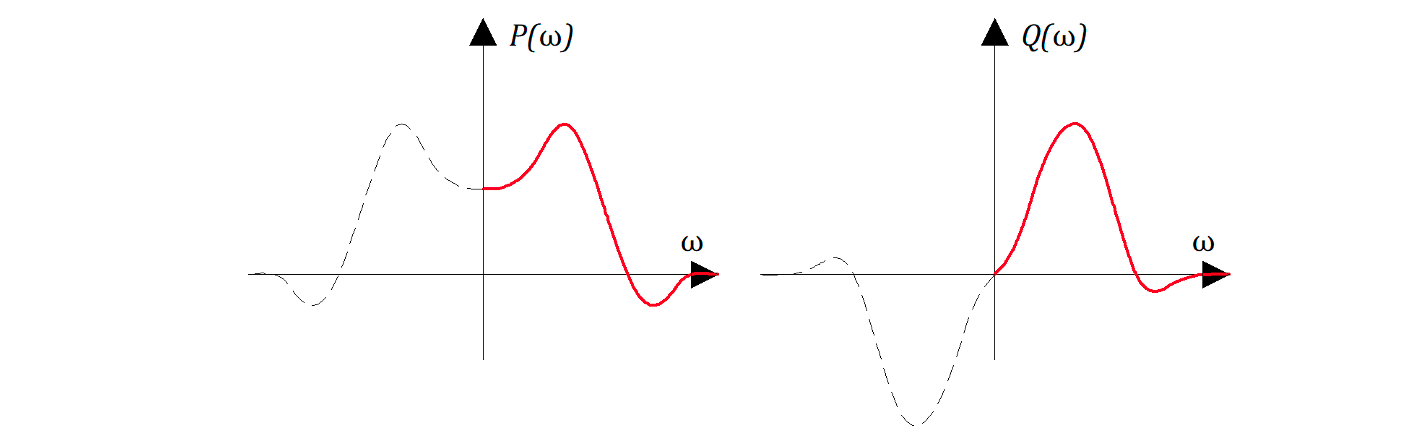
Рисунок 5.3.1 Пример зависмостей P и Q
На этих рисунках представлен «примерный» вид зависимостей P (w)и Q(w) для «какой-то» замкнутой САР причем P(w) — четная функция, т.е. P(w) = P(-w); Q(w) — нечетная функция, т.е. Q(w) = — Q(-w).
Если известны частотные свойства разомкнутой САР, то можно определить частотные свойства замкнутой САР. Воспользуемся показательной формой для АФЧХ
Где — амплитуда (модуль), — сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:
Приравнивая чисто вещественные и чисто мнимые части, имеем
Для нахождения амплитуды и сдвига фазы замкнутой передаточной функции как функции от амплитуды и сдвига фазы разомкнутой системы. Разделив (2) на (1) получим:
Сдвиг фазы замкнутой системы через характеристики разомкнутой системы:
Для получения амплитуды замкнутоей системы возведем оба уравнения системы (5.3.5) в квадрат:
складываем эти два уравнения:
Аналогичным образом можно выразить, например, P(w) и Q(w) — характеристики замкнутой САР через u(w) и u(w) — характеристики разомкнутой САР.
Пример
В качестве примера на рисунке 5.4.1 приведена модель помещения, в котором с помощью интегрирующего звена обеспечивается подвод тепла для поддержания температуры. Температура задается в виде ступенчатой функции. В качестве внешнего воздействия используется внешняя температура.
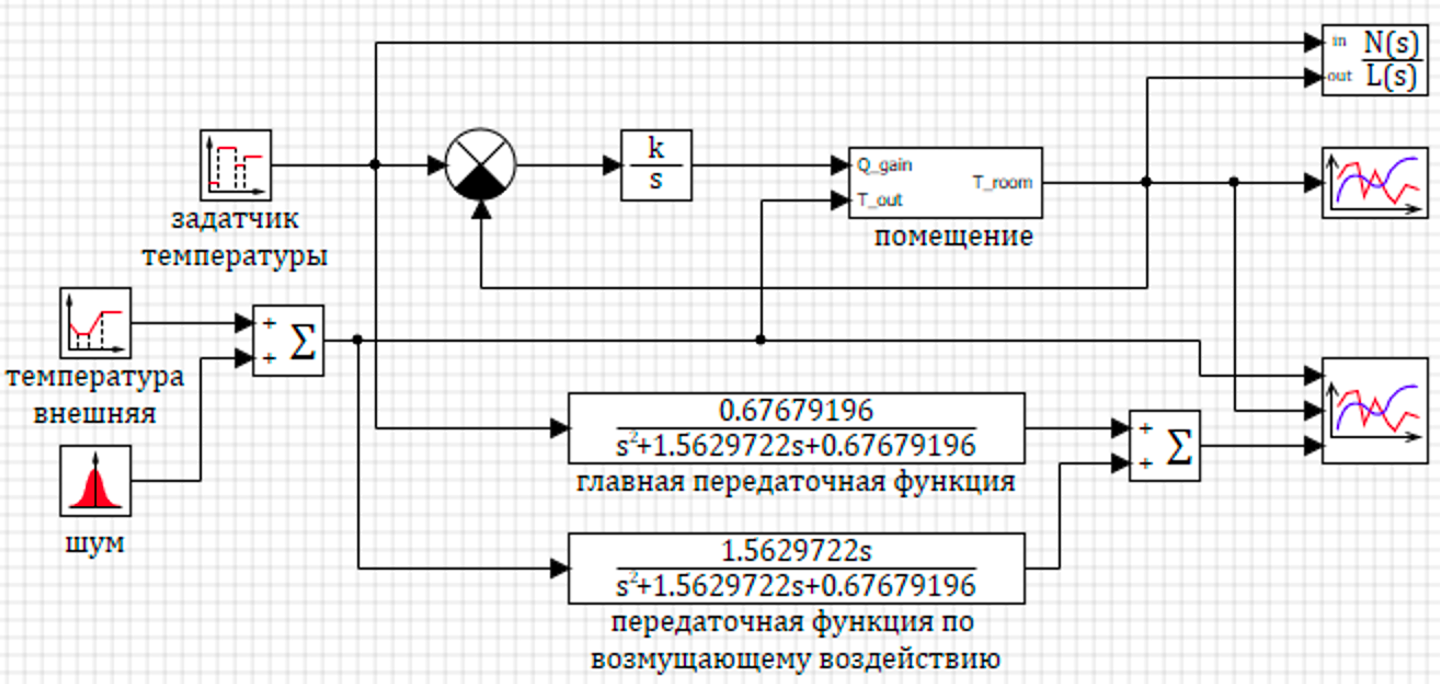
5.4.1 Рисунок сравнение физической модели и передаточных функций
Передаточные функции построены средтвами автоматического анализа. Видно, что знаменатель главной передаточной функции и знаменатель передаточной функции по возмущающиму воздействию одинаковы.
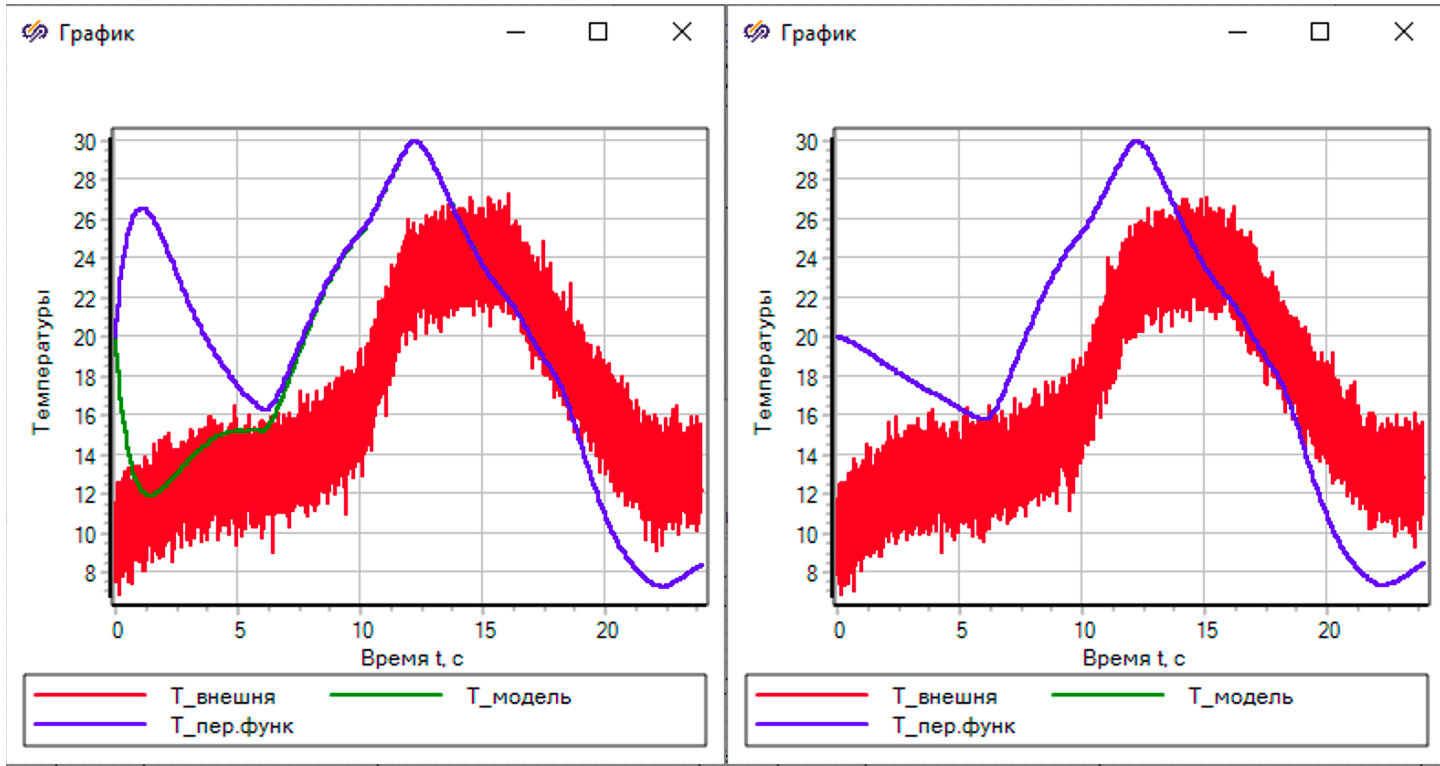
5.4.2 Результаты моделирования.
График справа показывает расхождение результаты модели (зеленая линия) и передаточных функций (синит линя) в начале расчета, но потом функции сходятся. Расхождение объясняются разными начальными условиями по производным. Слева тот же самый график, но в это случае начальное состояние определено с помощю загрузки стационарного состояния, полученного предварительным моделированием. В этом случае совпадение модели и передаточных функций полное.
Для определения общей передаточной функции запишем выражение для выходной переменной системы

 (3.54)
(3.54)
Правило: передаточная функция системы с отрицательной обратной связью равна дроби, в числителе которой стоит передаточная функция прямого канала  , а знаменатель представляет собой сумму единицы и произведения передаточных функций прямого и обратного каналов системы.
, а знаменатель представляет собой сумму единицы и произведения передаточных функций прямого и обратного каналов системы.
В случае положительной обратной связи формула (3.54) принимает вид
 (3.55)
(3.55)
На практике обычно встречаются системы с отрицательной обратной связью, для которых передаточная функция находится по соотношению (3.54).
3.3.4. Правило переноса
В некоторых случаях для получения общей передаточной функции системы с помощью структурных преобразований удобнее было бы перенести точку приложения сигнала через звено ближе к выходу или входу. При таком преобразовании структурной схемы следует придерживаться правила: передаточная функция системы должна оставаться неизменной.
Рассмотрим ситуацию, когда точка приложения сигнала переносится через звено ближе к выходу. Исходная структура системы показана на рис. 3.31. Определим для нее результирующую передаточную функцию
 (3.56)
(3.56)
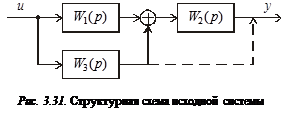
Перенесем точку приложения сигнала через звено с передаточной функцией  добавив в этот канал некоторую передаточную функцию
добавив в этот канал некоторую передаточную функцию  Получим структурную схему преобразованной системы (рис. 3 32).
Получим структурную схему преобразованной системы (рис. 3 32).
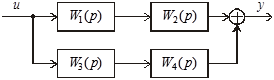 |
Рис. 3.32. Структурная схема преобразованной системы.
Для нее передаточная функция имеет вид
 (3.57)
(3.57)
Поскольку при преобразовании структуры системы ее передаточная функция не должна измениться, приравняв правые части выражений (3.56) и (3.57), определим искомую передаточную функцию 
 (3.58)
(3.58)
Таким образом, при переносе точки приложения сигнала ближе к выходу системы в канал следует добавить передаточную функцию звена, через которое переносится сигнал.
Аналогичное правило можно сформулировать для переноса точки приложения сигнала ближе к входу системы: в соответствующий канал следует добавить обратную передаточную функцию звена, через которое переносится сигнал.
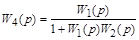
Определить общую передаточную функцию системы, структурная схема которой приведена на рис. 3.33.
Предварительно определим передаточные функции типовых соединений звеньев: передаточная функция параллельного соединения звеньев

а передаточная функция последовательно соединенных звеньев

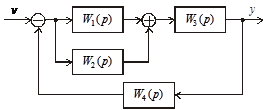 |
Рис. 3.33. Структурная схема системы
С учетом введенных обозначений структуру системы можно привести к виду, изображенному на рис. 3.34.
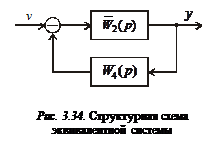 Используя структурные преобразования, запишем общую передаточную функцию системы
Используя структурные преобразования, запишем общую передаточную функцию системы
Подставляя вместо  и
и  их значения, получим окончательно
их значения, получим окончательно

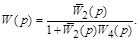
Определить передаточную функцию системы автоматического сопровождения цели радиолокационной станции [6], структурная схема которой представлена на рис. 3.35.
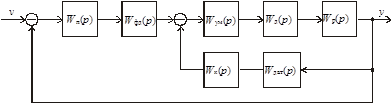
Рис. 3.35. Структурная схема системы автоматического сопровождения цели
Здесь  – передаточная функция приемника системы;
– передаточная функция приемника системы;  – передаточная функция фазового детектора;
– передаточная функция фазового детектора;  – передаточная функция усилителя мощности;
– передаточная функция усилителя мощности;  – передаточная функция двигателя;
– передаточная функция двигателя;  – передаточная функция редуктора;
– передаточная функция редуктора;  – передаточная функция датчика частоты вращения антенны;
– передаточная функция датчика частоты вращения антенны;  – передаточная функция корректирующего устройства.
– передаточная функция корректирующего устройства.
Используя правила структурных преобразований, запишем



Определим передаточную функцию внутреннего контура
и прямого канала системы

Определим полную передаточную функцию системы
Подставляя вместо промежуточных передаточных функций  , исходные значения, получим окончательно
, исходные значения, получим окончательно

3.4. Структурные схемы, соответствующие дифференциальным уравнениям
Второй способ составления структурной схемы основан на использовании дифференциальных уравнений. Рассмотрим его сначала для объекта, поведение которого описывают векторно-матричные уравнения (2.1), (2.2):
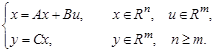 (3.59)
(3.59)
Проинтегрируем уравнение состояния в (3.59) по времени и определим переменные состояния и выхода в виде
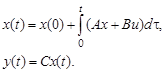 (3.60)
(3.60)
Уравнения (3.60) являются основными для составления схемы.
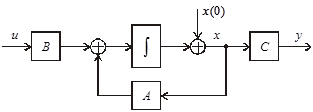 |
Рис. 3.36. Структурная схема, соответствующая уравнениям
состояния объекта
Структурную схему, соответствующую уравнениям (3.60), удобнее изображать, начиная с выходных переменных y, причем входные и выходные переменные объекта желательно располагать на одной горизонтальной прямой (рис. 3.36).
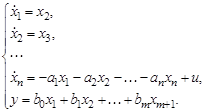
Для одноканального объекта структурную схему можно составить по уравнению (2.3), разрешив его относительно старшей производной
 (3.61)
(3.61)
Проинтегрировав (3.61) n раз, получим
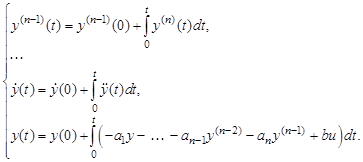 (3.62)
(3.62)
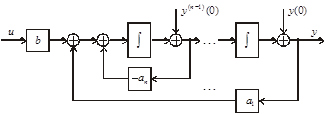
Системе уравнений (3.62) соответствует структурная схема, приведенная на рис. 3.37.
Рис. 3.37. Структурная схема, соответствующая уравнению (3.61)
Как видим, одноканальный объект управления, поведение которого описывает уравнение (3.61), структурно всегда можно представить в виде цепочки из n последовательно соединенных интеграторов с обратными связями.
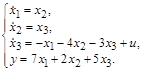
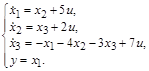
Изобразить структурную схему объекта, модель которого задана следующей системой дифференциальных уравнений:
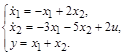
Предварительно проинтегрируем уравнения состояния
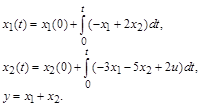
 |
Рис. 3.38. Иллюстрация составления структурной схемы
по уравнениям состояния
В соответствии с интегральными уравнениями на рис. 3.38 изобразим структурную схему системы.
3.5. Переход от передаточной функции к каноническому описанию
Обсудим наиболее известные способы преобразования математической модели объекта в виде произвольной передаточной функции к описанию в переменных состояния. Для этой цели используем соответствующие структурные схемы. Отметим, что данная задача неоднозначна, так как переменные состояния для объекта можно выбирать различным образом (см. подразд. 2.2).
Рассмотрим два варианта перехода к описанию в переменных состояния от передаточной функции объекта
 (3.63)
(3.63)
где  Предварительно представим (3.63) в виде произведения двух передаточных функций:
Предварительно представим (3.63) в виде произведения двух передаточных функций:
1.  (3.64)
(3.64)
2.  (3.65)
(3.65)
Каждому из этих представлений (3.63) соответствует своя простая модель в переменных состояния, которая называется канонической формой.
3.5.1. Первая каноническая форма
Рассмотрим преобразование математической модели системы с передаточной функцией (3.64). Ее структурную схему можно представить в виде двух последовательно соединенных звеньев
(рис. 3.39).

Рис. 3.39. Структурное представление системы (3.64)
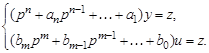
Для каждого звена системы запишем соответствующее операторное уравнение
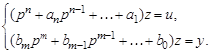 (3.66)
(3.66)
Определим из первого уравнения (3.66) старшую производную переменной z, что соответствует значению  в операторной форме
в операторной форме

Полученное выражение позволяет представить первое уравнение (3.66) в виде цепочки из n интеграторов с обратными связями (см. подразд. 3.5), а выходная переменная y формируется в соответствии со вторым уравнением (3.66) как сумма переменной z и ее m производных (рис. 3.40).
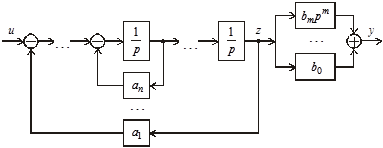
Рис. 3.40. Схема, соответствующая уравнениям (3.66)
Используя структурные преобразования, получим структурную схему системы, приведенную на рис. 3.41.
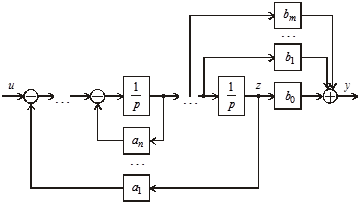
Рис. 3.41. Структурная схема, соответствующая канонической форме
Отметим, что структурная схема, соответствующая передаточной функции (3.64), состоит из цепочки n интеграторов, где n – порядок системы. Причем в обратной связи находятся коэффициенты знаменателя исходной передаточной функции (коэффициенты характеристического полинома), а в прямой связи – коэффициенты полинома ее числителя.
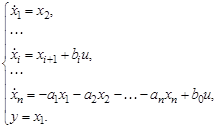
От полученной структурной схемы нетрудно перейти к модели системы в переменных состояния. С этой целью выход каждого интегратора примем за переменную состояния

что позволяет записать дифференциальные уравнения состояния и уравнение выхода системы (3.63) в виде
 (3.67)
(3.67)
Систему уравнений (3.67) можно представить в векторно-матричной форме (2.1) со следующими матрицами:
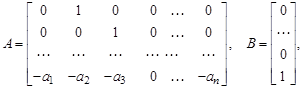

Модель системы в переменных состояния (3.67) будем называть первой канонической формой.
3.5.2. Вторая каноническая форма
Рассмотрим второй способ перехода от передаточной функции (3.63) к описанию в переменных состояния, для чего структуру системы (3.65) схематично представим на рис. 3.42.
 |
Рис. 3.42. Структурное представление передаточной функции (3.65)
Ее операторные уравнения имеют вид
 (3.68)
(3.68)
Аналогично предыдущему случаю представим первое уравнение (3.68) в виде цепочки из n интеграторов с обратными связями, а входное воздействие z сформируем в соответствии со вторым уравнением (3.68) в виде суммы управления u и m его производных (рис. 3.43).
В результате структурных преобразований получим структурную схему системы, приведенную на рис. 3.44. Как видим, и в этом случае структурная схема, соответствующая передаточной функции (3.65), состоит из цепочки n интеграторов. В обратной связи также располагаются коэффициенты характеристического полинома, а в прямой связи – коэффициенты полинома ее числителя.
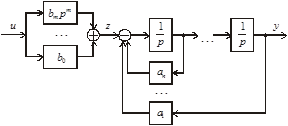
Рис. 3.43. Схема, соответствующая уравнениям (3.68)
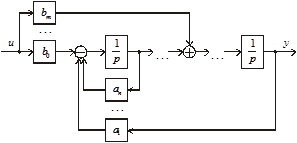
Рис. 3.44. Структурная схема, соответствующая передаточной функции (3.65)
Снова в качестве переменных состояния выберем выходные величины интеграторов и запишем относительно них дифференциальные уравнения состояния и уравнение выхода
 (3.69)
(3.69)
По уравнениям (3.69) определим матрицы
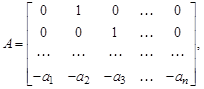
Модель системы в переменных состояния типа (3.69) будем называть второй канонической формой.
Отметим, что матрица A неизменна для первой или второй канонических форм и содержит коэффициенты знаменателя исходной передаточной функции (3.63). Коэффициенты числителя передаточной функции (3.63) содержат матрица C (в случае первой канонической формы) или матрица B (в случае второй канонической формы). Поэтому уравнения состояния, соответствующие двум каноническим представлениям системы, могут быть записаны непосредственно по передаточной функции (3.63) без перехода к структурным схемам, приведенным на рис. 3.40 и 3.43.
Как видим, переход от передаточной функции к описанию в переменных состояния является задачей неоднозначной. Мы рассмотрели варианты перехода к каноническому описанию, которые чаще других используются в теории автоматического управления.
Получить два варианта канонического описания и соответствующих структурных схем для системы, модель которой имеет вид
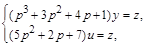
Используем представление передаточной функции в виде (3.64) и запишем для нее операторные уравнения
от которых перейдем к структурной схеме, приведенной на рис. 3.45.
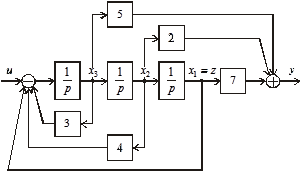
Рис. 3.45. Структурная схема, соответствующая первой канонической форме
На основании этой структурной схемы запишем уравнения первой канонической формы в виде
Для перехода ко второй канонической форме представим передаточную функцию системы в виде (3.65) и запишем для нее следующие операторные уравнения:
которым соответствует структурная схема, приведенная на рис. 3.46.
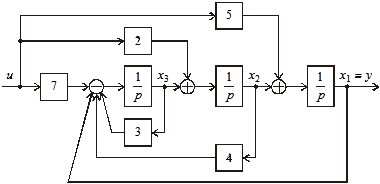
Рис. 3.46. Структурная схема, соответствующая второй канонической форме
Запишем теперь модель системы в виде второй канонической формы
3.6. Область применения структурного метода
Структурный метод удобен при расчете линейных автоматических систем, но имеет свои ограничения. Метод предполагает использование передаточных функций, поэтому может применяться, как правило, при нулевых начальных условиях.
При использовании структурного метода необходимо придерживаться следующего правила: при любом преобразовании системы ее порядок не должен уменьшаться, т. е. недопустимо сокращение одинаковых множителей в числителе и знаменателе передаточной функции. Сокращая одинаковые множители, мы тем самым выбрасываем из системы реально существующие звенья. Проиллюстрируем это утверждение примером.
Рассмотрим систему, состоящую из интегрирующего и дифференцирующего звеньев, которые соединены последовательно.
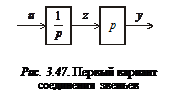 Первый вариант соединения звеньев показан на рис. 3.47.
Первый вариант соединения звеньев показан на рис. 3.47.
Используя структурные преобразования, найдем общую передаточную функцию

Отсюда следует вывод, что подобное соединение звеньев эквивалентно безынерционному звену, т. е. сигнал на выходе системы повторяет сигнал на ее входе. Покажем это, рассматривая уравнения отдельных звеньев. Выходной сигнал интегрирующего звена определяется соотношением
где  – начальное условие на интеграторе. Сигнал на выходе дифференцирующего звена, а следовательно, и всей системы имеет вид
– начальное условие на интеграторе. Сигнал на выходе дифференцирующего звена, а следовательно, и всей системы имеет вид

что соответствует выводу, сделанному на основе анализа общей передаточной функции звеньев.
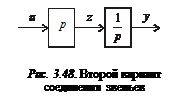 Второй вариант соединения звеньев показан на рис. 3.48, т. е. звенья поменяли местами. Передаточная функция системы та же, что и в первом случае,
Второй вариант соединения звеньев показан на рис. 3.48, т. е. звенья поменяли местами. Передаточная функция системы та же, что и в первом случае,

Однако теперь выход системы не повторяет входной сигнал. В этом можно убедиться, рассматривая уравнения звеньев. Сигнал на выходе дифференцирующего звена соответствует уравнению

а на выходе системы определяется соотношением
Как видим, во втором случае выходной сигнал отличается от сигнала на выходе первой системы на величину начального значения, несмотря на то, что обе системы имеют одну и ту же передаточную функцию.
В этом разделе рассмотрены динамические характеристики типовых звеньев, из которых состоят системы управления произвольной конфигурации. Обсуждены особенности структурных схем, построенных на основе передаточных функций и дифференциальных уравнений. Приведены два способа перехода от передаточной функции системы через структурные схемы к ее моделям в виде переменных состояния, соответствующие различным каноническим формам.
Следует отметить, что представление системы в виде структурной схемы позволяет в ряде случаев оценить ее статику и динамику и дает, по существу, структурный портрет системы.
3.1. Изобразить структурную схему системы, дифференциальное уравнение которой имеет вид:
а) 
б) 
в) 
3.2. Изобразить структурную схему системы, модель которой представлена в переменных состояния:
а)  б)
б) 
в)  г)
г) 
3.3. Определить передаточные функции систем, если их структурные схемы имеют вид, представленный на рис. 3.49.
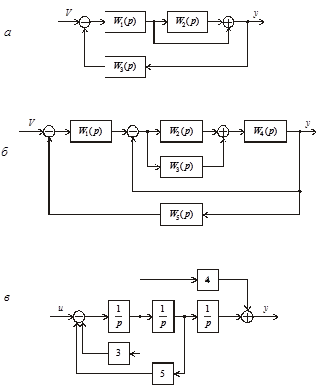
Рис. 3.49. Структурные схемы к задаче 3.3
3.4. Известны структурные схемы системы (рис. 3.50). Записать их модели в переменных состояния.

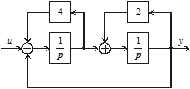
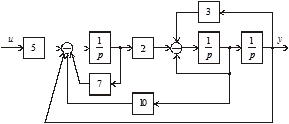
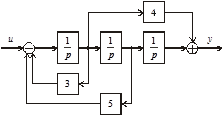
Рис. 3.50. Структурные схемы к задаче 3.4
3.5. Известна структурная схема системы (рис. 3.51).
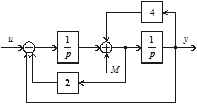
Рис. 3.51. Структурная схема к задаче 3.5
1. Определить передаточную функцию  в предполо-жении, что
в предполо-жении, что 
2. Определить передаточную функцию  полагая
полагая 
3. Записать модель системы в переменных состояния.
 |
4. Повторить пп. 1 и 2 для системы, структурная схема которой приведена на рис. 3.52.
Рис. 3.52. Структурная схема к задаче 3.5
3.6. Изобразить структурную схему, соответствующую первой канонической форме описания системы, имеющей передаточную функцию
1. Записать первую каноническую форму.
2. Изобразить структурную схему, соответствующую второй канонической форме описания системы.
3. Записать вторую каноническую форму.
3.7. Изобразить структурную схему, соответствующую первой канонической форме описания системы, имеющей передаточную функцию
1. Записать первую каноническую форму.
2. Изобразить структурную схему, соответствующую второй канонической форме описания системы.
3. Записать вторую каноническую форму.
3.8. Изобразить структурную схему, соответствующую первой канонической форме описания системы, имеющей передаточную функцию
1. Записать первую каноническую форму.
2. Изобразить структурную схему, соответствующую второй канонической форме описания системы.
3. Записать вторую каноническую форму.
1. Андреев Ю.Н. Управление конечномерными линейными объектами. – М.: Наука, 1978.
2. Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. – М.: Наука, 1974.
3. Ерофеев А. А. Теория автоматического управления. – СПб.: Поли-техника, 1998.
4. Иващенко Н.Н. Автоматическое регулирование. – М.: Машино-строение, 1978.
5. Первозванский А.А. Курс теории автоматического управления. – М.: Высш. шк., 1986.
6. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Высш. шк., 1989.
7. Коновалов Г.Ф. Радиоавтоматика. – М.: Высш. шк., 1990.
8. Филипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория базовых знаний, 2001.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Передаточная функция
Пример . Объект управления (ОУ) описывается линейным дифференциальным уравнением третьего порядка:
(2)
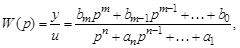
1) Передаточная функция ОУ в общем случае может быть представлена в виде отношения
W(iω) = A(ω)e iφ(ω) = U(ω) + iV(ω),
где R(p)и Q(p) – изображения по Лапласу выходной и входной переменных ОУ, соответствующих левой и правой частям уравнения 1. Отсюда, передаточная функция будет иметь вид:
(3)
или
. (4)
2) Определим частотные характеристики ОУ. Известно, что частотная передаточная функция W(ω) может быть представлена в виде:
, (5)
где A(ω) – амплитудная частотная характеристика (АЧХ);
φ(ω) – фазовая частотная характеристика (ФЧХ);
U(ω) – вещественная частотная характеристика (ВЧХ);
V(ω) – мнимая частотная характеристика;
Подставим iω в выражение (3) вместо p . Получим:
(6)
На основе выражений (5) и (6) выделим отдельно амплитудную и фазовую частотные характеристики и подставим численные значения коэффициентов. Исходя из того, что:
A(ω) = |W(iω)|
φ(ω) = arg(W(iω))
(см. комплексные числа). Окончательно получим: (7)
3) Определим логарифмическую амплитудную частотную характеристику (ЛАЧХ).
Известно, что ЛАЧХ определяется из соотношения:
L(ω) = 20lg(A(ω)) (8)
Данная характеристика имеет размерность дБ (децибелы) и показывает изменение отношения мощностей выходной величины к входной. Для удобства ЛАЧХ строят в логарифмическом масштабе.
Фазовая частотная характеристика, построенная в логарифмическом масштабе, будет называться логарифмической фазовой частотной характеристикой (ЛФЧХ).
Примеры построения ЛАЧХ и ЛФЧХ для наших исходных данных приведены на рисунке 1.
Определим импульсную переходную (весовую) функцию. Весовая функция w(t) представляет собой реакцию системы на единичную импульсную функцию, поданную на ее вход. Весовая функция связана с передаточной функцией преобразованием Лапласа.
. (9)
Следовательно, весовую функцию можно найти, применив обратное преобразование Лапласа к передаточной функции.
w(t) = L -1 [W(p)] (10)
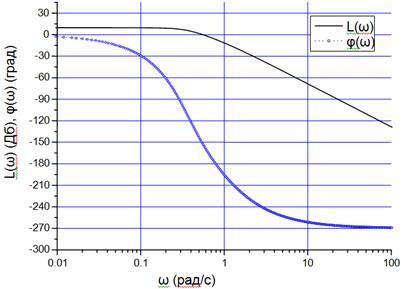
Рисунок 1 — L(ω) – ЛАЧХ системы (Дб); φ(ω) – ЛФЧХ системы (град); ω – частота входного сигнала (рад/с)