Состав программируемого логического контроллера
В общем случае ПЛК представляет собой базу, на которую устанавливаются модули в соответствии с решаемой задачей (рис. 6.1). Блок питания (БП) может быть как встроенным в базу, так и устанавливаться отдельно. Как правило, контроллеры питаются от бытовой электросети -220 В. Блок питания может быть снабжен резервным аккумулятором для поддержания работы контроллера в случае пропадания внешнего электропитания. Далее на базу устанавливается модуль центрального процессорного устройства (ЦПУ) и модули для подключения к датчикам и исполнительным устройствам (модули ввода/вывода). На базу могут также устанавливаться специализированные модули связи, например Ethernet или дополнительные последовательные порты связи.
Рис. 6.1. Типовая структура программируемого логического контроллера
Как правило, в ПЛК устанавливается один модуль ЦПУ, остальные слоты базы занимают модули ввода/вывода. Некоторые ПЛК допускают установку нескольких модулей ЦПУ, например, для организации горячего резервирования модуля ЦПУ некоторые ПЛК допускают установку двух модулей ЦПУ. Модуль ЦПУ может обслуживать ограниченное число модулей ввода/вывода. Некоторые ПЛК позволяют повысить этот лимит с помощью установки дополнительных модулей ЦПУ. Такие модули становятся ведомыми, вся обработка все равно ведется в основном модуле ЦПУ, остальные ЦПУ занимаются обслуживанием модулей ввода/вывода. Например, рассмотренные ниже контроллеры MOSCAD имеют лимит 15 модулей на 1 ЦПУ, при этом позволяют подключить дополнительно до 15 ведомых таких же модулей ЦПУ, с 15 модулями ввода/вывода для каждого из них.
В простейших случаях ПЛК может быть представлен единым устройством, в котором БП, ЦПУ и модуль ввода/вывода объединены в одном корпусе (рис. 6.2). Дополнительные модули ввода/вывода при этом подключаются специальными шлейфами и имеют собственный корпус. В самом простом случае подключение дополнительных модулей к ПЛК не предусматривается.

Рис. 6.2. ПЛК в виде единого устройства с внешними модулями ввода/вывода
6. 7. Понятие плк. Структура и основные компоненты плк.
ПЛК является основным средством автоматизации на нижнем уровне управления технологическими объектами и процессами.
Управляющие контроллеры широкого применения выпускает большое количество фирм, среди которых есть и такие известные, как Siemens, Turck, Omron, PEP Modular Computers (IUC), Advantech (ADAM) и т. д. Существуют крупные производители контроллеров и в СНГ, выпускающие серии контроллеров «МикроДАТ», «Ломиконт», SMART-КП и другие.
Обобщенная структурная схема контроллера:
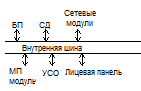
МП модуль – микропроцессорный модуль. Состоит из микропроцессора, ОЗУ, ПЗУ (для OC, фирменного ПО и библиотеки алгоритмов), ППЗУ (для программ пользователя);
УСО – устройство связи с объектом – это обычно аналого-цифровые преобразователи (АЦП и ЦАП, гальваническая развязка);
СД – модуль самодиагностики, который осуществляет контроль и диагностику элементов контроллера в процессе его работы и сигнализирует при обнаружении неисправностей;
Сет модули – для взаимод-я с пром сетью.
Лицевая панель – с ее помощбю вып программ-е контроллеров.
Внутриблочная шина является одним из основных архитектурных решений для систем промышленной автоматизации – магистрально-модульная архитектура, в которой различные внешние блоки связываются между собой через общую магистраль.
— шины VME (половина выпускаемых контроллеров);- ПК архитектуры (включая ISA, EISA, Multibus I и II, PC/104) (около трети);- шина PCI;
— на встроенные материнские платы.
Внутри блочные шины постоянно развиваются. Так на данный момент есть стандарты VME64, PCI64 (64-битные версии).
Обычно все контроллеры имеют резервный источник питания, поддерживающий его работоспособность во время перерывов в электроснабжении, обычно малогабаритные аккумуляторы.
Преимущества контроллеров над обычными ЭВМ.
К-р не требует знания обычных яз программ-я. К-ры программ-ся на спец языках, которые максимально упрощены и приближены к понятиям и операциям, получившим распространение в СА. В частности, в программное обеспечение контроллера обычно зашивается библиотека стандартных алгоритмов, для которых заранее написаны программы (например, ПИ, ПИД-регуляторы и т.д.). Задача пользователя состоит в том, что использую эти алгоритмы, получить решение задачи.
17. Логическое упр-е. Цели и задачи логического управления. Структура улу.
Логическим управлением называют управление с помощью дискретных сигналов, принимающих конечное число фиксированных значений, и осуществляемое в соответствии с заданным алгоритмом управления. Обычно используют двухуровневые сигналы, обозначаемые условно «0» и «1». Логическое управление используется для решения следующих задач автоматизации:
1)пуска и остановки технологических объектов с помощью некоторой последовательности действий;
2)перехода с одного режима на другой;
3)для управления периодическими процессами, когда необходимо циклическое выполнение некоторой последовательности дейстий;
4)защиты технологических объектов в аварийных и предаварийных ситуациях.
Автоматизация логического управления осуществляется с помощью аппаратных и программных средств, получивших название устройств или систем логического управления (УЛУ или СЛУ).
Структура устройств логического управления (УЛУ).
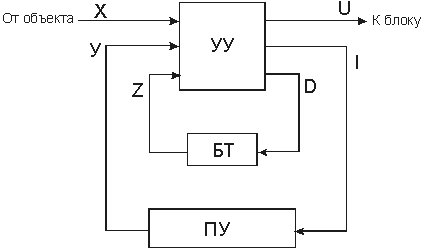
Структурная схема устройства логического управления
На схеме приняты следующие обозначения для блоков и сигналов: УУ — управляющее устройство или автомат;
БТ – блок таймеров, предназначенный для организации всех задержек времени, требуемых в алгоритме управления; ПУ – пульт управления, предназначенный для взаимодействия с человеком – оператором.
Х – множество сигналов от автоматических датчиков объекта; U – множество управляющих сигналов, поступающих на двухпозиционные и трехпозиционные исполнительные механизмы объекта (например, клапаны, задвижки и т.п.); Y – множество сигналов от кнопок и ключей ручного управления, находящихся на пульте управления; I – множество сигналов, поступающих на пульт управления с целью включения/выключения элементов световой и звуковой сигнализации; D – множество сигналов, управляющих таймерами в блоке БТ, т.е. включающих таймеры для отсчета требуемых выдержек времени; Z – множество сигналов из блока таймеров, свидетельствующих об окончании требуемых выдержек времени.
При построении устройств логического управления в блоке БТ и ПУ обычно используются стандартные элементы автоматики, выпускаемые промышленностью, такие как реле времени, таймеры, светодиодные индикаторы и т.п.
Структура ПЛК (Лекция)
ПЛК представляют из себя микропроцессорное (МПС) устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления. Каждый из них представляет собой вычислительную машину, имеющую некоторое множество входов и выходов.

Рис. 1. Обобщенная структура программируемого контроллера
Контроллер отслеживает изменение входов и вырабатывает программно определенное воздействие на выходах. Обладая памятью, ПЛК в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Такая модель соответствует широко известным конечным автоматам. Однако возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень.
Первоначально они предназначались для замены релейно-контактных схем, собранных на дискретных компонентах – реле, счетчиках, таймерах, элементах жесткой логики. Принципиальное отличие ПЛК от релейных схем заключается в том, что все его функции реализованы программно. На одном контроллере можно реализовать схему, эквивалентную тысячам элементов жесткой логики. При этом надежность работы схемы не зависит от ее сложности.
2. Дискретные входы
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. На уровне программы это один бит информации. Кнопки, выключатели, контакты реле, датчики обнаружения предметов и множество приборов с выходом типа «сухой контакт» или «открытый коллектор» непосредственно могут быть подключены к дискретным входам ПЛК.
Состояние некоторых первичных приборов систем промышленной автоматики определяется целым цифровым словом. Для их подключения используют несколько дискретных входов.
Системное программное обеспечение ПЛК включает драйвер, автоматически считывающий физические значения входов в оперативную память. Благодаря этому, прикладному программисту нет необходимости разбираться с внутренним устройством контроллера. С точки зрения прикладного программиста дискретные входы это наборы бит, доступные для чтения в ОЗУ.
Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА. В простейшем случае, для подключения нормально разомкнутого контакта, дискретный вход и сам контакт необходимо подключить последовательно к источнику питания в 24 В. Для питания таких внешних датчиков нужен отдельный источник питания. Иногда источник питания внешнего маломощного оборудования включают в состав ПЛК. Дискретные входы некоторых контроллеров рассчитаны на прием уровней сигналов с напряжениями высокого уровня, в том числе переменного тока (например, в 220. 240 В).
Все современные датчики, базирующиеся на самых разнообразных физических явлениях (емкостные, индуктивные, ультразвуковые, оптические и т.д.), как правило, имеют встроенные первичные преобразователи и не требуют дополнительного согласования при подключении к дискретным входам ПЛК.
3. Аналоговые входы
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д.
Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП). В результате, образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8 — 12 разрядные преобразователи, что в большинстве случаев, исходя из современных требований по точности управления технологическими процессами, является достаточным. Кроме этого АЦП более высокой разрядности не оправдывают себя, в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.
Для аналоговых входов наиболее распространены стандартные диапазоны постоянного напряжения -10. +10 В и 0. +10 В. Для токовых входов – 0. 20 мА и 4. 20 мА. Особые классы аналоговых входов представляют входы, предназначенные для подключения термометров сопротивления и термопар. Здесь требуется применение специальных технических решений ( трехточечное включение, источники образцового тока, схемы компенсации холодного спая, схемы линеаризации и т. д.). Для достижения хороших результатов измерений должно обеспечиваться высокое качество выполнения монтажа внешних аналоговых цепей.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля. Управление коммутатором и АЦП выполняет драйвер системного программного обеспечения ПЛК. Прикладной программист работает с готовыми значениями аналоговых величин в ОЗУ.
Несоответствие физических значений напряжений и токов датчиков уровням входов/выходов контроллера решается применением нормирующих преобразователей или заменой нестандартных датчиков.
4. Специальные входы
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний.
5. Дискретные выходы
Один дискретный выход ПЛК способен коммутировать один электрический сигнал. Также как и дискретный вход, с точки зрения программы это один бит информации.
Нагрузкой дискретных выходов могут быть лампы, реле, соленоиды, силовые пускатели, пневматические клапаны, индикаторы и т. д.
Простейший дискретный выход ПЛК выполняется в виде контактов реле. Такой выход достаточно удобен в применении и прост. Однако он обладает характерными недостатками всех реле – ограниченный ресурс, низкое быстродействие, разрушение контактов при работе на индуктивную нагрузку. Альтернативным решением дискретного выхода является электронный элемент – например, схема с открытым коллектором. Наиболее широким спросом пользуются дискретные выходы средней мощности (до 1А, 24В).
Практика эксплуатации доказала нецелесообразность сосредоточения в корпусе ПЛК большого числа силовых коммутирующих элементов. При необходимости управления сильноточными нагрузками применяются выносные устройства коммутации. Таким образом, установка силовых коммутирующих приборов осуществляется максимально близко к нагрузке. В результате, сокращается длина силовых монтажных соединений, снижается стоимость монтажа, упрощается обслуживание, уменьшается уровень электромагнитных помех.
6. Системное и прикладное программное обеспечение
Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с программным обеспечением ЭВМ можно сказать, что оно выполняет функции операционной системы, т.е. управляет работой узлов контроллера, занимается организацией их взаимосвязи, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти в адресном пространстве центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд.
Другая часть программного обеспечения универсальных контроллеров это прикладные программы управления конкретным процессом. Эти программы создаются разработчиком системы управления.
7. Рабочий цикл ПЛК
ПЛК работают циклически по методу периодического опроса входных данных. Рабочий цикл ПЛК включает 4 фазы:
2. выполнение пользовательской программы,
3. установку значений выходов,
4. некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится непосредственное управление аппаратными ресурсами. Прикладная программа имеет дело с одномоментной копией значений входов в памяти. Внутри одного цикла выполнения программы, значения входов можно считать константами. Такая модель упрощает анализ и программирование сложных алгоритмов.
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рис 1.19.

Рис. 2. Рабочий цикл программы ПЛК
В технических характеристиках ПЛК приводится типовое время рабочего цикла. При его измерении пользовательская программа должна содержать 1К логических команд (на языке IL ( STL ) МЭК 61131-3). Сегодня ПЛК имеют типовое значение времени рабочего цикла, измеряемое единицами миллисекунд и менее. События, требующие быстрой реакции, выделяются в отдельные задачи – задачи обработки прерываний, приоритетность и период выполнения которых можно изменять.
8. Языки программирования ПЛК
На сегодняшний день ПЛК на 90 % являются программным продуктом. Для их программирования в настоящее время используются специализированные языки. Специализация языков ПЛК заключена в упрощении их применения и приближении к предметной области. Контроллеры обеспечиваются средствами визуального прикладного проектирования.
АРХИТЕКТУРА ПЛК
Даже краткое знакомство с тем, что собой представляют промышленные контроллеры и как осуществляется создание систем управления на их базе, приводит нас к представлению о том, что понятие ПЛК не ограничивается «железом», это целостная современная технология. Она включает специфическую аппаратно-программную базу с определенными принципами организации совместной работы ее компонентов, специализированные языки программирования, подходы объединения в различные сети и т.д.
Формировать состав аппаратных средств системы управления, и тем более создавать программу работы контроллера невозможно без четкого представления о принципах реализации их архитектуры. Под архитектурой контроллеров (как, собственно, и других вычислительных средств и систем) понимают совокупность общих структурных и логических подходов к созданию аппаратных средств, программного обеспечения и принципов организации взаимосвязанной работы их компонентов. За долгие годы для ПЛК сложились определенные архитектурные решения, которых придерживается абсолютное большинство производителей.
Изучение контроллеров и возможностей создания на их базе систем управления, безусловно, необходимо начинать с последовательного знакомства с компонентами их архитектуры и принципами организации их взаимосвязи.
Структурные компоненты контроллеров
ПЛК представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления. Каждый из них представляет собой вычислительную машину, имеющую некоторое множество входов и выходов.
Контроллер отслеживает изменение сигналов на входах и вырабатывает программно определенное воздействие на выходах. Обладая памятью, ПЛК в зависимости от предыстории событий способен реагировать по-разному на текущие события. Такая модель соответствует широко известным конечным автоматам. Однако возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень. Первоначально они предназначались для замены релейно-контактных схем, собранных на дискретных компонентах — реле, счетчиках, таймерах, элементах жесткой логики. В дальнейшем появились контроллеры с возможностью ввода и вывода аналоговой информации, с широкими вычислительными возможностями.
В обобщенной структуре любого современного контроллера (рис. 1.2.1), как уже указывалось выше, четко выделяются процессорный модуль (блок центрального процессора), проводящий программную обработку информации, и интерфейсная секция, в которую включаются модули, необходимые для ввода сигналов от датчиков и вывода данных на исполнительные устройства.
Рассмотрим более детально функции, которые выполняют перечисленные структурные компоненты контроллеров, и некоторые общие особенности их построения.
Процессорный модуль включает микропроцессор (центральное процессорное устройство), запоминающие устройства, часы реального времени и сторожевой таймер.
Огромное разнообразие задач, возлагаемых на ПЛК, и сильная зависимость цены от мощности контроллера являются причиной большого разнообразия используемых в них микропроцессоров — от простых и дешевых Atmel и Microchip до самых высокопроизводительных микропроцессоров серии Intel Pentium, включая двухъядерные и четырехъядерные.

Рис. 1.2.1. Обобщенная структура контроллера
В ПЛК используются 8-, 16- и 32-разрядные микропроцессоры. Восьмиразрядные микропроцессоры пользуются большим успехом в малопроизводительных ПЛК для несложного алгоритмического управления небольшими технологическими аппаратами, станками, построения межсетевых шлюзов. Их достоинством является высокая надежность, связанная с предельной простотой программного обеспечения. 16- и 32-разрядные микропроцессоры используются в высокопроизводительных контроллерах.
Кроме разрядности, основными характеристиками микропроцессоров в ПЛК являются архитектура, тактовая частота, наличие операций с плавающей точкой, типы поддерживаемых портов ввода- вывода, температурный диапазон работоспособности и потребляемая мощность.
Достаточно часто в контроллерах используют микропроцессоры с RISC-архитектурой (Reduced Instruction Set Computing — компьютеры с сокращенным набором команд). В таких микропроцессорах используется небольшое количество команд одинаковой длины и большое количество регистров. Сокращенный набор команд позволяет строить эффективные компиляторы и конвейер процессора. Используются микропроцессоры и других архитектур.
Тактовая частота характеризует производительность микропроцессоров. Производительность микропроцессоров с одной и той же архитектурой пропорциональна тактовой частоте.
Надо отметить, что микропроцессоры, используемые в ПЛК, на несколько поколений отстают от процессоров офисных персональных компьютеров в связи с относительно малым объемом рынка ПЛК, который не обеспечивает окупаемость разработки нового контроллера за период смены поколений микропроцессоров. Однако на такую «отсталость» можно посмотреть и с другой точки зрения. Отработанный за несколько лет выпуск конкретных БИС микропроцессоров, выверенные для них схемотехнические и программные решения позволяют обеспечивать высокую надежность промышленных контроллеров. Надежность же этих устройств является критерием, явно превалирующим над другими, даже над производительностью.
Емкость памяти определяет количество переменных (тегов), которые могут быть обработаны в процессе функционирования ПЛК. Память контроллеров делят на несколько уровней иерархии в зависимости от частоты использования хранящихся в ней данных и быстродействия. Основными типами памяти являются постоянное запоминающее устройство (ПЗУ, ROM), оперативное запоминающее устройство (ОЗУ, RAM) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации — системное программное обеспечение (операционная система), драйверы устройств, загрузчик, исполняемый модуль программы пользователя. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например значения переменных, результаты промежуточных вычислений, диагностическая информация, данные для отображения на дисплее.
Часы реального времени процессорного модуля представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Часы используются, когда необходима привязка данных или событий к астрономическому времени, например для управления уличным освещением в зависимости от времени суток, в системах охраны объектов и других случаях.
Сторожевой таймер (Watchdog Timer — WDT) представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор «зависает», то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал «Сброс» для перезапуска «зависшего» процессора.
Процессорный модуль ПЛК выполняет следующие задачи:
- • собирает данные из модулей ввода в память, обрабатывает их в соответствии с прикладной программой пользователя и отсылает данные из памяти в модули вывода;
- • выполняет обмен данными с устройством для программирования контроллера;
- • выдает метки часов реального времени;
- • осуществляет обмен данными с промышленной сетью;
- • реализует стек протоколов промышленной сети (для этой цели могут использоваться вспомогательные коммуникационные процессоры);
- • выполняет начальную загрузку и исполнение системного программного обеспечения (операционной системы);
- • исполняет загрузочный модуль пользовательской программы системы автоматизации;
- • управляет актами обмена с памятью.
К основным характеристикам процессорного модуля относятся:
- • тип операционной системы или системного программного обеспечения;
- • наличие исполнительной среды для системы программирования на стандартных языках;
- • типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, CAN, USB, Ethernet и др.);
- • типы поддерживаемых сетей (Modbus RTU, Modbus TCP, Ethernet, Profibus, CANopen, DeviceNet и др.);
- • возможность подключения устройств индикации или интерфейса оператора (светодиодного или ЖК-индикатора, клавиатуры, мыши, операторной панели, дисплея с интерфейсами VGA, DVI или CMOS, LVDS, трекбола и др.);
- • разрядность (8,16, 32 или 64 бита);
- • тактовая частота микропроцессора и памяти;
- • время выполнения команд;
- • объем, иерархия и типы памяти (ОЗУ, кэш, ПЗУ-флеш, съемная флешидр.);
- • типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы позиционирования и управления движением и др.). Одной из тенденций в развитии ПЛК является использование
процессорных модулей разной вычислительной мощности для одного конструктива контроллера. Это позволяет получить серию контроллеров разной мощности и тем самым покрыть больший сегмент рынка, а также выполнить модернизацию контроллеров, купленных потребителями, путем замены всего одного модуля.
Модули ввода. Современный модуль ввода имеет свой собственный микроконтроллер (процессор), который выполняет непрерывный циклический опрос всех своих каналов и помещает полученные данные в буфер. При поступлении в модуль команды считывания значений со входов собранные данные передаются из буфера модуля в процессорный модуль ПЛК, где помещаются в определенную область ОЗУ. Таким образом, работа процессорного модуля ПЛК и модуля ввода осуществляется асинхронно.
Существует несколько уровней и способов опроса множества каналов ввода. Опрос модулей может выполняться циклически с одинаковой частотой для всех модулей или с разной частотой. Второй вариант позволяет уменьшить загруженность шины, по которой выполняется обмен данными между модулями ввода и процессорным модулем. Однако в силу своей простоты наибольшее распространение получил циклический опрос модулей ввода. Если по алгоритму работы системы автоматизации используются только несколько каналов модуля, то для увеличения быстродействия системы неиспользуемые каналы можно замаскировать (исключить их из процедуры опроса).
Обмен данными с модулем выполняется по адресу, который обычно записывается в ПЗУ модуля. Иногда адресом выступает номер слота, в который вставляется модуль, или положение микропереключателя.
Входные цепи устройств ввода принято защищать от статического электричества, повышенного напряжения, изменения полярности.
Микроконтроллер типового модуля ввода выполняет следующие функции:
- • реализует протокол обмена с процессорным модулем ПЛ К;
- • исполняет команды, посылаемые ПЛК в модуль;
- • реализует выполнение функций автоматической калибровки, диагностики обрыва или короткого замыкания в цепи датчика;
- • преобразует форматы вводимых данных (инженерный формат — в единицы измеряемой величины, шестнадцатеричный формат, проценты от диапазона измерений);
- • устанавливает скорость обмена с процессорным модулем ПЛК (или по сети для ПЛК с распределенными модулями ввода-вывода);
- • выполняет цифровую фильтрацию входного сигнала.
Модули ввода могут иметь различные типы входов.
Дискретные входы. Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями — включен или выключен. На уровне программы это один бит информации. Кнопки, выключатели, контакты реле, датчики обнаружения предметов и множество приборов с выходом типа «сухой контакт» или «открытый коллектор» непосредственно могут быть подключены к дискретным входам ПЛК.
Состояние некоторых первичных приборов систем промышленной автоматики определяется целым цифровым словом. Для их подключения используют несколько дискретных входов.
Системное программное обеспечение ПЛ К включает драйвер, автоматически считывающий физические значения входов в оперативную память, благодаря чему прикладному программисту нет необходимости разбираться с внутренним устройством контроллера. С точки зрения прикладного программиста дискретные входы — это наборы бит, доступные для чтения в ОЗУ.
Все дискретные входы общего исполнения у контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА. В простейшем случае для подключения нормально разомкнутого контакта дискретный вход и сам контакт необходимо подключить последовательно к источнику питания в 24 В. Для питания таких внешних датчиков нужен отдельный источник питания. Иногда источник питания внешнего маломощного оборудования включают в состав ПЛК. Дискретные входы некоторых контроллеров рассчитаны на прием уровней сигналов с напряжениями высокого уровня, в том числе переменного тока (например, в 220. 240 В).
Все современные релейные датчики, базирующиеся на самых разнообразных физических явлениях (емкостные, индуктивные, оптические и т. д.), как правило, имеют встроенные первичные преобразователи и не требуют дополнительного согласования при подключении к дискретным входам ПЛК.
Аналоговые входы. Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т.д.
Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого- цифровому преобразованию (АЦП). В результате образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8—12-разрядные преобразователи, что в большинстве случаев, исходя из современных требований к точности управления технологическими процессами, является достаточным. Кроме этого, АЦП более высокой разрядности не оправдывают себя в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.
Разнообразие физических явлений порождает большое разнообразие аналоговых датчиков, для каждого из которых должно существовать соответствующее устройство ввода. Для унификации (сокращения числа типов) модулей ввода используют устройства нормирования сигналов, которые преобразуют измеряемую физическую величину в стандартный электрический сигнал, соответствующий ГОСТ 26.011 -80 и ГОСТ Р 51841 -2001. Применение стандарта позволяет изготовить всего один тип универсального устройства ввода со стандартными диапазонами для всех типов датчиков со стандартными выходными сигналами. Для аналоговых входов наиболее распространены стандартные диапазоны постоянного напряжения: -10. +10 В и 0. +10 В. Для токовых входов — 0. 20 мА и 4. 20 мА.
Особые классы аналоговых входов представляют входы, предназначенные для подключения термометров сопротивления, термопар, тензорезисторов. Здесь требуется применение специальных технических решений (трехточечное включение, источники образцового тока, схемы компенсации холодного спая, схемы линеаризации и т.д.). Для таких датчиков в силу их широкой распространенности нормирующие преобразователи и линеаризаторы встраивают в сами модули ввода. Поэтому, кроме универсальных модулей ввода, получили распространение специализированные модули ввода сигналов термопар, термопреобразователей сопротивления и тензорезисторов. В зависимости от типа применяемых датчиков входные цепи модулей аналогового ввода могут строиться для приема сигналов, снимаемых относительно общего провода, или дифференциальных сигналов.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля. Управление коммутатором и АЦП выполняет драйвер системного программного обеспечения ПЛК. Прикладной программист работает с готовыми значениями аналоговых величин в ОЗУ.
Специальные входы. Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов, входами для приема ШИМ-сигналов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот, — поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. В подобных случаях желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать необходимые для прикладной задачи величины.
Функции счетчика, частотомера и измерителя периода следования импульсов обычно совмещаются в одном и том же модуле ввода. Такие модули могут быть использованы для решения следующих задач:
- • измерение скорости вращения вала двигателя с целью ее стабилизации или изменения по заданному закону;
- • подсчет количества продукции на конвейере;
- • измерение частоты периодического сигнала;
- • работа с датчиками, имеющими импульсный выход (например, с энкодерами — датчиками угла поворота, электросчетчиками или анемометрами);
- • автоматическое дозирование счетной продукции;
- • подсчет количества продукции, выданной со склада.
Для расширения функциональных возможностей каждый счетный вход модуля может иметь вход разрешения счета (Gate) и источник тока для питания «сухих» контактов.
Вторым распространенным типом специальных входов являются входы, способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы, — входы прерываний.
Модули вывода. Как и модули ввода, они почти всегда в своем составе имеют собственный микроконтроллер, который выполняет следующие функции:
- • реализует протокол обмена с процессорным модулем ПЛК;
- • исполняет команды, посылаемые ПЛК в модуль;
- • реализует выполнение функций автоматической калибровки, диагностики;
- • преобразует форматы выводимых данных и т.д.
Выдача данных из памяти на соответствующие выходы модулей вывода осуществляется драйверами системного программного обеспечения ПЛК. С точки зрения прикладного программиста выходы — это наборы бит, байт или слов, доступные для чтения из ОЗУ.
Модули вывода могут иметь различные типы выходов. Дискретные выходы. Один дискретный выход ПЛК способен коммутировать один электрический сигнал. Также как и дискретный вход, с точки зрения программы это один бит информации.
Нагрузкой дискретных выходов могут быть лампы, реле, соленоиды, силовые пускатели, пневматические клапаны, индикаторы и т.д.
Простейший дискретный выход ПЛК выполняется в виде контактов реле. Такой выход достаточно удобен в применении и прост. Однако он обладает характерными недостатками всех реле — ограниченный ресурс, низкое быстродействие, разрушение контактов при работе на индуктивную нагрузку. Альтернативным решением дискретного выхода является электронный элемент — например, схема с открытым коллектором. Наиболее широким спросом пользуются дискретные выходы средней мощности (до 1 А, 24 В).
Практика эксплуатации доказала нецелесообразность сосредоточения в корпусе ПЛК большого числа силовых коммутирующих элементов. При необходимости управления сильноточными нагрузками применяются выносные устройства коммутации. Таким образом, установка силовых коммутирующих приборов осуществляется максимально близко к нагрузке. В результате сокращается длина силовых монтажных соединений, снижается стоимость монтажа, упрощается обслуживание, уменьшается уровень электромагнитных помех.
Аналоговые выходы. Поскольку ПЛК является цифровой вычислительной машиной, выходные данные формируются в цифровой форме и для получения аналоговых выходных сигналов нужны цифроаналоговые преобразователя. Как правило, в ПЛК применяются 8—12-разрядные преобразователи, что в большинстве случаев, исходя из современных требований к точности управления технологическими процессами, является достаточным.
Для аналоговых выходов наиболее распространены стандартные диапазоны постоянного напряжения: -10. +10 В и 0. +10 В, для токовых входов — 0. 20 мА и 4. 20 мА.
Специальные выходы. На них могут формироваться частотно-импульсные или широтно-импульсные сигналы, сигналы для управления специфическим оборудованием.
Специальные модули. Существуют модули, созданные специально для совместной работы с конкретным и достаточно широким набором средств. Микропроцессоры этих модулей выполняют встроенные специализированные программы, освобождая разработчика от их создания, а ПЛК — от их выполнения.
Простейшим примером специальных модулей служат модули аналогового ввода с аппаратным управлением встроенными в них же дискретными выводами. При параметрировании этих модулей в процессе сборки системы или в процессе работы программно контроллером в эти модули могут задаваться значения минимальной и максимальной уставки входного сигнала. При выходе измеряемого аналогового сигнала за пределы уставок модуль аппаратно без участия программы ПЛК активизирует соответствующие выходы, минимизируя время реакции системы на это событие.
Другим примером таких модулей могут являться модули управления системами взвешивания, которые включают аналоговые входы для получения сигнала с датчика массы, дискретные выходы для управления ходом взвешивания, выводы с интерфейсом для подключения принтера.
Существуют модули, предназначенные для подключения к сетям переменного тока и проведения измерения и расчетов целой группы параметров — напряжения, силы тока, частоты, мощности, фазового угла и коэффициента мощности, преобразования измеренных параметров в цифровой код и передачи результатов в цифровую сеть.
Выделим еще некоторые черты, которые могут быть присущи интерфейсным модулям.
Существуют модули комбинированного ввода-вывода, которые имеют как входные, так и выходные каналы.
На лицевой панели дискретных модулей обычно расположены светодиоды индикации состояния внешних цепей. Некоторые аналоговые модули на своей лицевой панели имеют цифровые индикаторы, на которые выводятся в физических единицах значения вводимых и выводимых сигналов. Это удобно при осуществлении пусконаладочных работ, а в дальнейшем — при обслуживании систем управления.
В абсолютном большинстве модулей ввода-вывода внутренние цепи гальванически развязаны от внешних цепей. Это позволяет добиться защиты ПЛ К-систем от кондуктивных помех, распространяющихся по земляным шинам, а также от случайного (аварийного) попадания на входы-выходы модулей высокого напряжения. Большинство модулей ввода-вывода являются многоканальными. При этом общий провод отдельных входов-выходов может быть отдельным для каждого из них, быть общим для всех каналов или быть общим для группы из них.
Конструктивное подключение периферийных модулей к модулю центрального процессора у разных компаний-производителей может реализовываться по- разному. Одни компании это делают с помощью шлейфов, другие — с помощью ножевых разъемов, выдвигающихся из боковой грани модуля, наконец, третьи процессорный модуль реализуют вместе с объединительной панелью, в слоты которой и вставляются модули. Иногда порядок включения модулей в периферийную секцию не зависит от их типа (при этом для удобства работы их обычно группируют по типам или функциям). В противном случае обычно предусматриваются различного рода «ключи», не позволяющие нарушить необходимый порядок соединения, вставить модуль в не соответствующий ему слот. Некоторые компании практикуют подключение периферийных модулей только по тому или иному сетевому интерфейсу.
Коммуникационные модули. Функционально развитые системы управления сложными технологическими процессами в последнее время все чаще разрабатываются как системы, включающие несколько контроллеров, которые делят между собой общий поток задач управления. Управляя относительно самостоятельно разными элементами общего технологического объекта, они не могут не обмениваться некоторой информацией. Достаточно часто с контроллеров отдельных систем управления информация собирается на общие диспетчерские пункты. Для всего этого они объединяются общей информационной сетью с использованием тех или иных технологий цифровых промышленных сетей. Коммуникационные порты сетей могут включаться в состав процессорного модуля. Однако более гибко подходить к построению сетей обмена, выбирать тот или иной сетевой протокол и интерфейс позволяет использование коммуникационных модулей. Эти модули, как и модули ввода-вывода, подключаются к процессорному блоку. Каждый из них включает коммуникационный процессор, реализующий тот или иной протокол обмена, и имеет соответствующий интерфейсный разъем.
Источник питания — модуль, без которого не обходится ни одно сложное электронное устройство, в том числе ПЛК. Стандартными напряжениями питания ПЛК являются напряжения 12, 24 или 48 В. Источником электрической энергии обычно служит промышленная сеть напряжением в 220 В и частотой 50 Гц. В случае распределенных систем автоматизации источник питания может быть расположен вдали от ПЛК, поэтому напряжение на клеммах ПЛК или модулей ввода-вывода может сильно отличаться от напряжения источника питания вследствие падения напряжения на сопротивлении кабеля. Для решения этой проблемы каждый ПЛК или каждый модуль удаленного ввода снабжается встроенным стабилизатором напряжения, который обеспечивает нормальное их функционирование в диапазоне напряжений от 10 до 30 В.
Низкое напряжение питания позволяет питать контроллеры от аккумуляторов бортовых сетей транспортных средств или переносных аккумуляторов.
В ПЛК иногда используют батарею для питания часов реального времени (которые должны функционировать при выключенном ПЛК) и для сохранения информации в памяти на время аварийных перерывов питания.