34. Маневренный планшет, назначение.
МАНЕВРЕННЫЙ ПЛАНШЕТ – средство малой механизации для графического решения задач прямолинейного маневрирования. Используется как при боевом маневрировании (занятие позиции для использования оружия, сближение с целью на заданное расстояние, уклонение от встречи и другой задачи), так и при расхождении с судами в море.
35. Особенности использования планшета в относительном движении.
Относительная прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую судоводитель наблюдает на экране индикатора относительного движения. При относительной прокладке также быстро определяется и расстояние, на котором цель пересечёт курс нашего судна. Для этого достаточно измерить расстояние ПО. (если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме – точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную Vн до пересечения с ЛОД).
36. Логарифмическая шкала «Время-Скорость-Дистанция».
Относительная прокладка выполняется на радиолокационном маневренном планшете, представляющим собой сетку полярных координат. Для ускорения расчётов, связанных с плаваньем судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала. Она построена следующим образом: на прямой от начальной точки в некотором масштабе отложены отрезки, равные десятичным логарифмам чисел от 0,1 до 60 и оцифрованные в значениях этих чисел. Поскольку в пределах 60 единиц действия с минутами аналогичны действиям с числами в десятичной системе, любому отсчёту на шкале можно присвоить наименование «Время», «Дистанция» или «Скорость» и по известным значениям дух из них найти третье, решая пропорцию.

При пользовании логарифмической шкалой следует помнить, что верхняя ножка циркуля (показывает большие отсчёты) всегда показывает время, а нижняя (показывает меньшие отсчёты) –скорость и дистанцию.
37. Решение задач с использованием логарифмической шкалы…
Пример решения задачи с использованием логарифмической шкалы:
Условие: Из наблюдений установлено относительное перемещение отметки – 2,2 мили на 8 мин. Найти относительную скорость.
Ставим нижнюю ножку циркуля на деление 2,2, а верхнюю – на деление шкалы 8, не меняя раствора циркуля, перемещаем верхнюю ножку циркуля на деление шкалы 60. Нижняя ножка циркуля покажет относительную скорость V =16,5уз.
38. Общие принципы организации радиолокационного наблюдения.
Выбор шкал дальности. Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8-16 миль) с периодическим просмотром окружающей обстановки на шкалах как более мелкого, так и более крупного масштаба. В стесненных водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах более крупного масштаба с периодическим обзором на мелкомасштабных шкалах. Шкалы дальности 32 и 64 мили используются для определений места судна по высоким берегам. После обсервации необходимо сразу перейти на шкалы средней или малой дальности для продолжения наблюдения. При расхождении с целями на близких расстояниях следует использовать крупномасштабные шкалы, на которых более точно оценивается степень опасности и быстрее обнаруживаются маневры целей.
Как правило, применительно к обстановке выбирается шкала, дающая разумный компромисс между наблюдением за ближними целями и достаточной дистанцией обнаружения новых целей. Совмещение этих противоположных требований может быть достигнуто применением крупномасштабной шкалы в относительном движении со смещенным центром развертки.
Выбор ориентации изображения. Наибольшую точность измерения пеленга, сопоставление радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «Север». При работе в этом режиме следует после каждого изменения курса проверять согласование индикатора РЛС с репитером гирокомпаса. В режимах ориентации «Курс» и «Курс стабилизации» изображение на экране РЛС соответствует картине, наблюдаемой визуально с мостика. В режиме «Курс» точность радиолокационного пеленгования и, как следствие, точность оценки опасности столкновения и предполагаемой дистанции расхождения существенно уменьшаются. При изменении курса судна или значительном рыскании происходит «смазывание» радиолокационного изображения.
Выполнение измерений пеленга и дистанции. Все измерения должны выполняться на одной и той же шкале дальности, одним и тем же наблюдателем и одним и тем же приемом. Сначала рекомендуется измерять пеленг, затем сразу же расстояние. Направление измеряется механическим или электронным визиром с точностью 0,5°. Линия визира должна делить отметку цели пополам. При этом точность отсчета пеленга электронным визиром не зависит от смещения центра развертки во всех режимах. Расстояние измеряется совмещением подвижного круга дальности (ПКД) с эхо-сигналом таким образом, чтобы наружный край ПКД совпал с внутренним краем отметки. При измерении расстояния электронным визиром конец визира устанавливается примерно на 0,5 мм в ближнюю к центру экрана кромку эхо-сигнала. Измерение пеленгов и дистанций может быть выполнено с помощью системы автосопровождения, данные которой обычно точнее полученных вручную.
Маневренный планшет 3 цели. Примерный алгоритм действий по расчету маневрирования при работе с маневренным планшетом
2) оценки ситуации опасного сближения (столкновения) с судами, эхо-сигналы которых наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения /кр, пересечения /»ер, дистанции кратчайшего сближения DKр и выявления их реальной и потенциальной опасностей;
3) выбора и обоснования маневра, выделения судов, с которыми необходимо расходиться;
4) расчета выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации;
5) расчета момента начала маневра (с учетом маневренных элементов
Судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования;
6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
Рассмотрим подробно процесс решения задачи на расхождение с помощью графической (радиолокационной) прокладки на маневренном планшете.
1. Для удобства расчетов интервал времени принимает 3 или 6 мин, т е. 1/20 или 1/10 ч.
2. Строим на планшете из его центра вектор курса и скорости VL нашего судна.
Рис. 213. Решение задачи на расхождение с помощью графической прокладки
Рис 214 Определение потенциальной опасности и местоположения судна, для расхождения с которым требуется произвести расчет маневра
3. С появлением на экране РЛС эхо-сигналов определяем их пеленги и дистанции и наносим на планшет.
4. Через равные интервалы времени (3 или 6 мин) в прежней последовательности наносим следующие точки и после их соединения получим векторы относительной скорости.
5. При этих векторах строим векторные треугольники, для чего Vc своего судна из центра планшета переносим в первую точку L Соединив начало своего вектора Vc со второй точкой 2, получим вектор скорости наблюдаемого судна W
6. Линию, соединяющую точки 1 и 2, продлим за центр планшета, получим ЛОД.
Оценка ситуации заключается в определении степени опасности столкновения судов. Находим кратчайшее расстояние DKp, опуская перпендикуляр из центра планшета до ЛОД и точку пересечения курса судна-цели Dnep, для чего проводим из центра планшета линию, параллельную вектору скорости У» суд-на-цели до пересечения с ЛОД
Выявление потенциальной скорости судов можно осуществить двумя способами:
1) проигрываем маневр нашего судна (Vc) или судна-цели (V») и определяем по изменению ЛОД и Vo возможный переход из потенциальной опасности в реальную. Изменение курса, скорости или комбинированный маневр нашего судна вправо ухудшает ситуацию с судном «б». В данном случае маневр необходим с судном «б» (рис. 214);
2) использованием особенностей перемещения эхо-сигналов в относительном движении на экране РЛС, что было подробно разобрано при визуальном методе оценки ситуации.
Для выбора и обоснования вида маневра проигрывают все возможные его варианты: изменение курса, скорости или того и другого одновременно При этом учитываются все факторы, сопутствующие плаванию в условиях ограниченной видимости, навигационных особенностей района плавания, МППСС-72 и маневренных возможностей своего судна и возможного маневра судна-цели. Судоводитель должен стремиться к безопасному расхождению приемлемым вариантом Расчет маневра можно производить при помощи палетки и линейки. Он сводит к минимуму графическую работу по одному-двум судам. На рис. 215 выполнен расчет маневра для безопасного расхождения изменением своего курса вправо. Положение упрежденных точек не оказывает влияния на методику расчета с использованием векторных треугольников начальной ситуации. Следует всегда помнить, что момент упрежденной точки есть условный момент окончания маневра.
Момент начала маневра своего судна рассчитывается с учетом маневренных элементов судна (инерция, торможения, поворотливость и т. д.).
Рис. 215 Расчет маневра для расхождения изменением курса вправо; расчет выполнен с судном «б»
В векторном треугольнике судна «а» вектор нашей скорости поворачиваем вправо на рассчитанный угол. Получаем новый вектор относительной скорости Vo и соединяем точку _2 с концом повернутого вектора Vq. Параллельно вектору относительной скорости V»o из упрежденной точки проводим ОЛОД судна «а». Упрежденная точка берется за один и тот же интервал времени. После этого можно определить время расхождения судов tpicx и дистанцию отхода D0тх от курса нашего судна (см. рис. 215).
Для расчета используем новый вектор относительной скорости W Дистанция отхода рассчитывается на планшете. Для этого на линии нашего нового курса, проложенного из центра планшета, откладываем расстояние, которое пройдет наше судно за время расхождения. Затем из полученной точки опускаем перпендикуляр на линию первоначального курса. Отрезок этого перпендикуляра будет дистанцией отхода от курса в масштабе планшета.
Результат маневрирования контролируется с помощью ОЛОД. На планшет наносится не только ОЛОД судна, относительно которого рассчитан маневр, но и других судов, которые представляют потенциальную опасность. Эти линии ожидаемого относительного движения проводятся для контроля за развивающейся ситуацией после маневра, чтобы своевременно обнаружить маневр других судов, а также в случае допущенных ошибок в расчетах и графических построениях.
Из вышеизложенного видим, что оба метода взаимосвязаны и дополняют друг друга, обеспечивают решение задач на безопасное расхождение судов с помощью РЛС в условиях ограниченной видимости.
На некоторых судах над экраном РЛС установлен зеркальный планшет. Это вспомогательное устройство, являющееся беспаралаксной оптической системой. Преимущество зеркального планшета в том, что он дает возможность вести графическую прокладку, не прерывая наблюдения на экране РЛС.
Периодически повышая квалификацию, судоводители морского флота проходят тренировочные учения по решению задач на радиолокационных тренажерах.
Тип документа: Методическое пособие | doc .
Язык: Русский, Украинский .
Год издания: 2005 .
Методичні вказівки та завдання на виконання контрольної роботи з дисциплін “Тренажер РЛС і ЗАРП” для студентів 4-ого курсу заочної форми навчання Спеціальність 7.100301 “Судноводіння”
Каждый студент согласно своего варианта выполняет 5 задач на бланках маневренного планшета и отвечает на 2 вопроса на отдельном листе. Бланки маневренных планшетов с решенными задачами и лист с ответами подшиваются в отдельную папку.
Вариант контрольной работы выбирается по последней цифре личного шифра.
Вариант №№ задач №№ вопросов
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Для грамотного выполнения контрольной работы необходимо изучить Правила №№ 5, 6, 7, 8, 9, 10 МППСС-72, а также краткие методические указания по графическому решению задач на маневренном планшете.
На титульном листе папки контрольной работы указать фамилию, имя, отчество студента, номер личного шифра, наименование дисциплины, курс, номер варианта, специальность.
Выполненная работа в установленный срок передается для проверки преподавателю.
К зачету допускается студент, который выполнил контрольную и лабораторные работы.
Краткие методические указания по графическому решению задач на маневренном планшете.
Порядок решения задачи расхождения с одним судном
на маневренном планшете
(см. Приложения 1, 2)
Условия ограниченной видимости являются особыми условиями плавания, поэтому дисциплины «Радиолокационный тренажер» и «Тренажер САРП» предполагают прежде всего плавание в этих условиях.
При плавании при ограниченной видимости в открытом море обзор окружающей обстановки с помощью РЛС производится преимущественно на шкалах масштаба 12-16 миль, а эта дистанция является вероятной дальностью обнаружения большинства судов.
Хорошая морская практика для решения задачи расхождения с судами в открытом море рекомендует разделить экран РЛС на три зоны:
1) зона оценки ситуации от 12 до 8 миль, где определяются степень опасности столкновения, пара-метры движения встречных судов и проигрывается маневр расхож-дения;
2) зона маневрирования от 8 до 4 миль. Действия для расхождения рекомендуется принимать как можно скорее после установления опасности столкновения;
3) зона чрезмерного сближения от 4-х миль. До входа эхо-сигнала судна в эту зону маневр расхождения в открытом море должен быть завершен, чтобы при изменении ситуации в результате неверных маневров судов имелось время и пространство для устранения опасности столкновения.
При плавании в условиях ограниченной видимости привилегированных судов нет и на каждое судно с РЛС возлагается обязанность по предупреждению столкновения, причем рекомендуется соблюдать следующий приоритет маневров:
1. поворот вправо;
2. уменьшение скорости;
3. остановка судна;
4. поворот влево.
Основным допущением при решении задачи расхождения на маневренном планшете (ситуационном планшете) и с использованием САРП является неизменность параметров движения (курсов и скоростей) собственного судна и других судов на период набора информации и решения задачи.
Момент начала решения задачи – момент начала расхождения, «нулевая точка» это время снятия первого отсчета пеленга и дистанции до первой цели.
Время возвращения к первоначальным параметрам движения собственного судна это момент окончания расхождения.
При включении РЛС необходимо произвести правильную регулировку яркости и усиления приемника, а в случае необходимости уменьшить влияния помех от волнения и атмосферных осадков.
Порядок решения задачи расхождения на маневренном планшете:
1) Из центра планшета провести вектор перемещения собственного судна за 6 минут, Vн.
2) Сделать записи в таблице обработки радиолокационной информации о курсе (Кн) и скорости (Vн) собственного судна.
3) Из центра планшета радиусом Дзад. провести окружность. Рекомендуется при ограниченной видимости принимать в условиях открытого моря Дзад. = 1,5 ÷ 2 мили, а в стесненных водах Дзад. = 0,5 мили.
4) Наблюдая за ситуацией на экране РЛС выбрать по изменению относительных полярных координат (∆П ≈ 0 и ∆Д 5) С экрана РЛС снять отсчеты пеленга и расстояния эхо-сигнала опасного судна, запустить секундомер, заметить судовое время, сделать записи в таблицу обработки радиолокационной информации для нулевой точки о времени 0ا, пеленге и дистанции для судна А.
6) По этим данным нанести на маневренный планшет начальную ситуацию, обозначив нулевую точку цифрой 0ا и большой буквой А.
7) Используя параллельную линейку направить (воткнуть) вектор перемещения собственного судна за 6 минут Vн в нулевую точку и его начало обозначить буквой F (Fixed), вектор обозначить буквой Vн.
8) Провести часть окружности в районе нулевой точки, вправо и влево от нее (или окружность) радиусом Vн из центра F, что позволит ускорить графическое решение задачи.
9) На 6-й минуте снять отсчеты пеленга и расстояния эхо-сигнала того же судна А и записать их в таблицу обработки радиолокационной информации.
10) По полученным данным нанести на маневренный планшет 6-ти минутную точку, обозначив ее цифрой 6ا.
11) Соединить нулевую и 6-ти минутную точки прямой для определения вектора относительного перемещения цели за 6 минут. Стрелка вектора направлена в 6-ти минутную точку. Обозначим этот вектор Vо.
12) Продлить вектор Vо до центра планшета, получим ЛОДА – траекторию, по которой будет перемещаться эхо-сигнал судна А при неизменности курсов и скоростей собственного и встречного судов.
13) Из центра планшета на ЛОДА опустить перпендикуляр и снять значение Дкр.
14) Определить графическим вектором Vо от нулевой точки до основания перпендикуляра линии Дкр время кратчайшего сближения судов tкр.
15) Полученные значения Дкр и tкр записать на маневренном планшете.
16) Соединить точку F с 6-ти минутной точкой прямой, получим 6-ти минутный вектор цели Vц, направленный в 6-ти минутную точку, обозначить его Vц.
17) Используя параллельную линейку и измеритель определить истинные курс и скорость судна-цели А, сделать записи на маневренном планшете;
18) Нанести упрежденную точку (рекомендуется 12-ти минутную с учетом времени набора информации (tн.и. = 6 мин., решения задачи tр.з. = 3 мин. и выполнения маневра tм = 3 мин) и провести из нее пунктирными линиями касательные к окружности радиуса Дзад. Получим ОЛОДы, по которым должны перемещаться эхо-сигналы судна при выполнении маневра. При отвороте вправо ОЛОД пройдет слева от судна и наоборот.
19) Из 6-ти минутной точки провести линии параллельные ОЛОДам в противоположном направлении для определения сектора опасных курсов (СОК), за пределы которого нужно вывести конец вектора Vн для решения задачи расхождения. Если точка F находится в пределах СОК, решить задачу расхождения уменьшением скорости невозможно.
20) Выбрать эффективный маневр расхождения на безопасном расстоянии, причем изменение курса и/или скорости должно быть достаточно большим, чтобы оно было замечено встречным судном. Маневр отворота, в общем случае вправо, должен быть не менее чем на угол 30-45º, а уменьшение скорости должно быть не менее, чем на половину.
Комбинированный маневр изменением курса и скорости на практике применяется редко из-за ухудшения управляемости судна при снижении скорости.
Согласно требованиям Правила 19 МППСС-72 «… насколько это возможно следует избегать:
— изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым;
— изменения курса в сторону судна, находящегося на траверзе или позади траверза»;
— а также следует принимать во внимание ограничения РЛС, из-за которых эхо-сигнал судна слева может на экране не наблюдаться.
Ввиду невозможности согласованных действий кораблей (судов) в условиях ограниченной видимости правила расхождения даются в МППСС не в категорической форме, а в виде рекомендаций. В соответствии с Правилом 19 п. судно, обнаружившее с помощью радиолокатора другое судно, должно прежде всего определить, существует ли опасность столкновения. «Если имеются сомнения в отношении наличия опасности столкновения, то следует считать, что она существует» (Правило 7 п. «а»).
Выбор маневра для избежания чрезмерного сближения зависит от ситуации. Маневр может предусматривать изменение курса, скорости, а также того и другого одновременно. Изменение курса и скорости должно быть значительным. Небольшие последовательные изменения курса и скорости создают затруднения в истолковании радиолокационной информации на встречном судне. Под изменением скорости следует понимать ее уменьшение или остановку машин, так как увеличение скорости в условиях ограниченной видимости противоречит Правилам.
Таблица 18.2. Тактико-технические данные некоторых навигационных РЛС

Маневр только изменением курса является эффективным, если изменение курса производится заблаговременно, когда имеется достаточное водное пространство и когда этот маневр не вызывает чрезмерного сближения с другими судами. Выбор стороны изменения курса предоставляется командиру корабля, однако Правила рекомендуют избегать:
Изменения курса влево при нахождении другого судна впереди траверза, если это судно не является обгоняемым;
Изменения курса в сторону судна, находящегося на траверзе или позади траверза.
Анализ обстановки и определение элементов движения цели (ЭДЦ)
Место своего корабля К считают в центре планшета;
По пеленгам и дистанциям, измеренным радиолокатором через 1-2 мин, наносят на планшет не менее двух мест цели;
Через полученные точки М1, М2, М3 проводят линию относительного движения ЛОД1;
Из центра планшета на ЛОД1 опускают перпендикуляр КС1, длина которого является кратчайшим расстоянием расхождения с целью DKV.
Если DKp больше Dоз, угрозы чрезмерного (опасного) сближения нет. Дальнейших расчетов и маневров не потребуется до тех пор, пока цель не изменит курс или скорость.
Если DKp меньше Dоз, производится определение ЭДЦ:
Из точки К откладывают вектор скорости своего корабля VK;

Рис. 18.1. Анализ обстановки, определение ЭДЦ и расчет маневра расхождения с одиночной целью на маневренном планшете
— из конца вектора VK проводят линию, параллельную ЛОД1 На этой линии откладывают вектор относительной скорости Vр величину которого рассчитывают по формуле

— соединив точку К с концом вектора Vр получают вектор скорости VM;
Время сближения с целью на кратчайшее расстояние

Для анализа обстановки и определения ЭДЦ на маневренном планшете с помощью картосчислительной приставки «Пальма» выполняют следующие действия:
Маневренный планшет кладут на стол и согласовывают масштаб неподвижных кругов дальности (НКД) с окружностями планшета;
На окружностях планшета надписывают дистанции и выключают НКД;
Проводят линию курса корабля на планшете (считая свой корабль в центре) и совмещают его с отметкой курса изображения;
Закрепляют планшет и наносят на него начальные места наблюдаемых целей;
Через 1-2 мин наносят на планшет не менее двух-трех мест каждой цели;
Проводят линии относительного движения каждой цели.
По расположению ЛОД и величине DKp выявляют цели, с которыми возможно чрезмерное сближение. Дальнейшую обработку информации для расчета ЭДЦ можно производить, как указано выше. Для ускорения получения ЭДЦ молено применять следующий прием:
Планшет с нанесенными местами целей сдвигают назад по курсу на величину пройденного кораблем за время наблюдений расстояния;
Наносят новые отметки целей, сдвигая каждый раз планшет назад по курсу на величину пройденного расстояния;
Соединив прямой места целей, получают направление вектора истинной скорости каждой из них, направленной от предыдущих точек к последующим;
Величину векторов истинной скорости рассчитывают, как обычно, через пройденное расстояние и время наблюдений.
Указанный способ менее точен, чем предыдущий, но позволяет быстрее оценить обстановку при встрече с несколькими судами.
При наличии в РЛС режима истинного движения имеется возможность непосредственно с индикатора получать ЭДЦ и быстро обнаруживать их изменение. Однако на индикаторе, работающем в режиме истинного движения, определение DKp и Tкр затруднено, поэтому для точного определения этих величин необходимо переходить на режим относительного движения.
Определение ЭДЦ на картах крупного масштаба (1:50 000; 1:25 000) производится в сложных в навигационном отношении районах, где расчет маневра расхождения только на планшете может привести к выбору опасного курса. В этом случае штурман имеет возможность вести прокладку за себя и за цель в абсолютном движении без отрыва от навигационной обстановки. В случае применения автопрокладчика появляется возможность иметь текущие координаты своего корабля для ведения прокладки за несколько целей и наглядно наблюдать ситуацию.
Основные недостатки способа: невозможность быстро определить опасность столкновения; кратчайшее расстояние до цели DKp непосредственно из прокладки получить нельзя; на карте можно нанести только точку пересечения истинных курсов. Поэтому одновременно с прокладкой в абсолютном движении анализ обстановки и расчеты на расхождение рекомендуется производить на маневренном планшете посредством приставки «Пальма» с проверкой расхождения на карте.
Расчет и контроль маневра расхождения с одиночной целью на маневренном планшете
Рассчитывают и наносят на ЛОД1 упрежденную позицию цели Vц; величина М3Мц = Vрtц, где tц=2—4 мин, в зависимости от натренированности оператора;
Из точки Мц проводят касательную к окружности планшета, соответствующей заданному расстоянию D03 и борту расхождения; получают новую линию относительного движения цели ЛОД2;
Строят два новых скоростных треугольника, для чего из конца вектора Vм проводят в обратном направлении линию, параллельную ЛОД2 (на рис. 18.1 показана пунктиром), до пересечения с окружностью планшета, соответствующей VK;
Из полученных двух векторов КК» и КК» выбирают тот, при котором вектор относительной скорости Vp будет больше по абсолютной величине и курс КК» быстрее приведет к расхождению с целью.
Аналогично производится расчет маневра изменением скорости хода. После поворота на рассчитанный курс (изменения скорости хода) наблюдения за целью продолжаются и производится контроль маневра путем нанесения мест цели на планшете. Если места цели ложатся на линию ЛОД2, маневр выполняется правильно. Если места цели М5, М6, М7 ложатся на линию ЛОД3, параллельную ЛОД2, это означает, что поворот начат раньше рассчитанного времени и что расхождение произойдет на расстоянии, большем D03. Изменение направления ЛОД, т. е. смещение мест цели в одну сторону, свидетельствует об изменении ЭДЦ, что потребует новых расчетов.
Особенности использования HPЛC «Океан»
DKp определяется с точностью 2-3 каб;
Ткр определяется с точностью около 2 мин;
Курс встречного судна определяется с точностью 5-10°, сокорость — от 0,5 до 1 уз.
Расчет, маневра расхождения производится на маневренном планшете, как указано выше. Вычислительное устройство позволяет имитировать выбранный маневр (заранее «проиграть» его) и оценить возможные результаты, при этом ЛОД высвечивается на экране индикатора.
Основные варианты расхождения с одиночной целью приведены в § 23.11.
Расчет на маневренном планшете маневра расхождения с несколькими целями одновременно
Наиболее рациональным является расчет с построением секторов опасных относительных курсов (COOK), предложенный О. Г. Моревым. Расчет маневра предлагаемым способом производится следующим образом (рис. 18.2):
С обнаружением на экране встречных судов (цели № 1, 2, 3) ведут за каждое из них относительную прокладку на маневренном планшете;
Проведя ЛОДи ЛОД2 и ЛОД3, выявив опасность чрезмерного сближения с одной или несколькими целями, определяют их ЭДЦ (VМ1, VМ2_ и VМ3);
По цели с максимальной относительной скоростью (сближение с которой на Dкр произойдет раньше) назначают момент ее прихода в упрежденную позицию и наносят на этот момент упрежденные позиции каждой цели 1Mц, 2МЦ, ЗМЦ;
Из упрежденной позиции каждой цели проводят касательные к окружности Dоз, определяя опасный сектор (ОС) каждой цели;
В конце каждого вектора истинной скорости цели Vм1, Vм2, Vм3 строят сектор опасных относительных курсов;
Для безопасного расхождения со всеми целями одновременно изменяют свой курс или скорость так, чтобы конец своего вектора скорости VK располагался вне пределов COOK.

Рис. 18.2. Расчет маневра расхождения с несколькими целями одновременно на маневренном планшете
На рис. 18.2 видно, что уменьшение скорости до величины V»k позволяет разойтись со всеми целями на Dkp больше Doз. Если конец своего вектора скорости Vv будет лежать на границе СООК-1, то расхождение с целью № 1 произойдет на дистанции Doз, а с другими — на большей дистанции. Если конец своего вектора скорости V»»к будет находиться в точке пересечения сторон СООК-2 и СООК-3, то расхождение на Doз произойдет с этими двумя целями, а с целью № 1 — на большей дистанции. Рассчитанные варианты расхождения докладываются командиру корабля для выбора и утверждения одного из них. Окончанием маневра расхождения со всеми целями можно считать момент прихода последней из них на относительный траверз.
* В режиме автосопровождения точность определения пеленга и дистанции РЛС «Океан» на расстояниях до 16 миль составляет 0,5-0,7° и 30-40 м соответственно.
Вперед
Оглавление
Назад
ПРОКЛАДКА НА МАНЕВРЕННОМ ПЛАНШЕТЕ.
1. Истинная прокладка.
Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние D1, пускают секундомер, замечают судовое время Т1, курс своего судна Кн и отсчет лага ОЛ1. По пеленгу и расстоянию наносят местоположение эхо-сигнала А1 относительно своего местоположения, предварительно выбрав желаемый масштаб (рис. 1). Через определенный промежуток времени (для расчетов удобен интервал в 3 или 6 мин) наблюдения повторяют (П2, D2, Т2, ОЛ2) и наносят местоположения своего судна 02 и наблюдаемого судна А2. Проведя через точки А2, и А2, прямую линию, получим линию истинного перемещения цели Кц.
По расстоянию между точками А 1и А2 и по времени Т1 и Т2 можно определить скорость цели Vц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна Тпер и Dпер.
Для определения расстояния кратчайшего сближения Dкр и времени до него tкр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями А2F=O1O2. Отрезок O1С, проведенный перпендикулярно к линии, проходящей через точки A1, и F, будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки O1 и A4) можно найти параллельным перемещением отрезка O1С в положение O4A4. Время сближения на кратчайшее расстояние
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако, чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (A1, А2, А3) на одной прямой и равенство расстояний А1А2=А2А3 свидетельствуют как об отсутствии промахов в наблюдениях, так и о неизменности элементов движения цели в период от T1 до Т3.
К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него.
2. Относительная прокладка.
Эта прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения.
Из точки О, принимаемой за место своего судна, прокладывают наблюденные пеленги П1 и П2 и по ним расстояния D1 и D2 (рис. 2), Через полученные точки А1, и А2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения Dкр. Время сближения на кратчайшее расстояние
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. Dкр и tкр, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений — относительного
И судна-наблюдателя или
Учитывая коммутативность суммы векторов можно находить
Построение векторного треугольника (см. рис. 2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения.
Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию своего судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями.
3. Маневренный планшет.
Маневренный планшет представляет собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала. Она построена следующим образом: на прямой от начальной точки в некотором масштабе отложены отрезки, равные десятичным логарифмам чисел от 0,1 до 60 и оцифрованные в значениях этих чисел. Поскольку в пределах 60 единиц действия с минутами аналогичны действиям с числами в десятичной системе, любому отсчету на шкале можно присвоить наименование «Время», «Дистанция» или «Скорость» и по известным значениям двух из них найти третье, решая пропорцию
https://pandia.ru/text/80/090/images/image012_74.gif» width=»331″ height=»26″>
При пользовании логарифмической шкалой следует помнить, что «верхняя» ножка циркуля(устанавливаемая на большие отсчеты) всегда показывает время, а «нижняя»(устанавливаемая на меньшие отсчеты) — скорость и дистанцию.
Из наблюдений установлено относительное перемещение отметки — 2,2 мили за 8 мин. Найти относительную скорость.
Ставим нижнюю ножку циркуля на деление 2,2, а верхнюю — на деление шкалы «8»;
не меняя раствора циркуля, перемещаем верхнюю ножку циркуля на деление шкалы «60». Нижняя ножка циркуля покажет относительную скорость Vo=16.5 уз.
t=17 мин, V=15 уз. Найти расстояние S.
Ставим верхнюю ножку циркуля на деление «60», нижнюю — на «15»;
не меняя раствора циркуля, перемещаем верхнюю ножку циркуля на деление шкалы «17». Нижняя ножка циркуля покажет расстояние S=4.3 мили.
При V=17 уз судно прошло S=8,7 мили. Определить время, за которое судно проходит это расстояние.
Ставим верхнюю ножку циркуля на деление «60», а нижнюю — на деление шкалы «17»;
не меняя раствора циркуля, ставим нижнюю ножку циркуля на деление шкалы «8,7». Верхняя ножка циркуля покажет время t=31 мин.
4. Выбор и обоснование маневра для расхождения в заданной дистанции.
1. Способ относительного промежуточного курса.
Из графической прокладки находят требуемый угол изменения курса; из таблицы маневренных элементов по углу отворота находят время, затрачиваемое судном на поворот, tман; угол промежуточного курса и промежуточное плавание Sпр; из точки М1 позиции цели в момент начала поворота откладывают за время поворота; из конца вектора в сторону, обратную промежуточному курсу, откладывается промежуточное плавание Sпр; через начало вектора Sпр проводится ОЛОД параллельно .
Способ точен, но трудоемок. При решении задач расхождения на мостике судна не применяется. Применяется при разборе аварий и в качестве эталонного при оценке точности приближенных способов.
2. Способ условной упрежденной точки.
ОЛОД проводится не из точки М1 местоположения цели в момент начала маневра, а из условной упрежденной точки М, отнесенной по ЛОД вперед на время упреждения tупр. В первом приближении в качестве tупр принимают половину времени поворота. Таким образом, при этом способе учета циркуляции поворот судна-наблюдателя начинается на tупр
0,5 tман раньше, чем судно-цель придет в точку, из которой проведен ОЛОД.
Способ наиболее часто применяется на практике. Более точен для встречных целей и менее точен для целей, идущих сходящимися курсами. Неприменим при повороте под корму судна-сателлита, так как в этом случае V0= 0 и при любом tупр точки М и М1 совпадают.
3. Способ введения поправки в Dзад.
Как показывают расчеты, при изменении курса судна-наблюдателя на угол до 90° ошибки в Dзад вследствие инерционности поворота не превышают тактическою радиуса циркуляции. При больших углах поворота достигают диаметра циркуляции. В этом способе Dзадназначается с запасом на максимально возможную ошибку от неучета циркуляции. Этот способ является основным при повороте под корму потенциально опасного судна, идущего параллельным или почти параллельным курсом.
Учет инерции при маневре скоростью.
Инерционные характеристик и судна в соответствии с НШС-82 представляются в виде графиком, построенных в постоянном масштабе расстояний и имеющих шкалу значений времени и скорости. При решении задач этой главы предполагается, что будет использована информация об инерционно-тормозных характеристиках судна водоизмещением около 10000 т (судно I) и судна водоизмещением около 60 000 т (судно II), приведенная в Приложении I.
При изменении скорости судном-наблюдателем относительное местоположение цели будет перемещаться по криволинейной траектории, кривизна которой постепенно уменьшается по мере выхода своего судна на новую установившуюся скорость. Ошибки от неучета инерции при маневре скоростью могут достигать нескольких миль отсюда важность учета инерции. При маневре скоростью на крупнотоннажном судне новая скорость судна-наблюдателя устанавливается через десятки минут и все это время цель перемещается по кривой ЛОД — отсюда сложность учета инерции.
Учет инерции возможен следующими способами.
1. Способ построения кривой ОЛОД.
Относительная траектория перемещения судна может быть найдена построением путевых треугольников за последовательные интервалы времени t1, t2, . tn, после маневра So(ti)=Sц(ti) — Sн(ti)
Для построения кривой ОЛОД необходимо (рис. 6):
из точки М местоположения дели в момент начала маневра нашего судна провести линию курса цели и отметить на ней отрезки, проходимые целью через определенные интервалы времени, например, через каждые три минуты (точки В1, В2, . Вn); из точек Вi провести линии в сторону, обратную курсу судна-наблюдателя, и отложить по ним отрезки, пройденные судном-наблюдателем за соответствующее время после маневра (точки C1, C2, . Cn); через точки Сi провести кривую ЛОД и определить Dкр как кратчайшее расстояние от центра планшета до кривой.
Способ точный и наглядный, но трудоемкий. Этим способом решается только задача предсказания Dкр no выбранному маневру, но не решается задача по нахождению требуемого изменения скорости для расхождения в заданной дистанции. Для решения задач в условиях мостика не применяется. Используется при разборе аварий, а также в качестве эталонного для оценки точности приближенных способов учета инерции.
2. Способ введения поправки в Dзад.
При этом способе учета инерции условно считается, что в течение tупр сохраняется прежняя скорость судна-наблюдателя Vн (при этом завышается пройденный путь), а после мгновенно устанавливается новая скорость Vн1 (при этом пройденный путь занижается). Как видно из рис. 8, оптимальным будет такое время упреждения, при котором завышение пройденного пути за время tупр, компенсируется последующим занижением. Это соответствует равенству заштрихованных площадей на рис. 8.
На рис. 9 приведена информация по выбору оптимального времени упреждения в зависимости от выбранного маневра (Vн1/Vн=0 — СТОП, Vн1/Vн=0,5 — МПХ и т. д.) и характеристики инерционности tv. На оснооании этой информации в начале рейса может быть составлена рабочая таблица времени упреждения.
Судно имеет инерционную характеристику tv=4 и имеет следующую градацию скоростей ППХ 14 уз, СПХ 10 уз, МПХ 8 уз, СМПХ 5 уз. Составить рабочую таблицу времени упреждения.
ППХ — СПХ. Vн1/Vн= 10: 14 = 0,71. Из графика на рис.9 tупр/tv=0.8; tупр=0,8*4=3,2
3 мин. Рассчитав аналогично для Vн1/Vн=0,57; 0,3; 0, получим для маневра сбавления скорости с полного хода.
4. Способ средней скорости.
При этом способе учета инерции в треугольнике скоростей откладывается не новая скорость судна-наблюдателя, а некоторая средняя (эквивалентная) скорость за время от начала маневра до момента кратчайшего сближения Через концы векторов Vcp и Vц проводится вектор средней относительной скорости и параллельно ему из точки М проводится ОЛОДср (рис.10). Фактически эхо-сигнал будет перемещаться по кривой линии, расположенной между ЛОД и ОЛОДср выпуклостью в сторону ЛОД, и в точке кратчайшего сближения пересечений ОЛОДср.
В первом приближении в качестве средней скорости может быть принята средняя арифметическая между старой и новой
При малом времени до кратчайшего сближения ()ошибка при этом не превысит 10 % выбега судна при свободном торможении.
Более точно величина средней скорости может быть найдена из универсальной таблицы учета инерции, приведенной в Приложении 2. Использование универсальной таблицы учета инерции рассмотрим на примерах.
Найти среднюю скорость судна I за время от начала маневра ППХ — МПХ до кратчайшего сближения, если tкр=20 мин.
Из графиков тормозных путей судна I (Приложение 1)для скорости 16 уз находим tv= 4 мин. В универсальной таблице учета инерции в колонке tv= 4 находим ближайшее tкр=22 мин и в соответствующей строке для реверса 0,5 Vн получаем Vср/Vн= 0,6. Среднюю скорость можно отложить в треугольнике скоростей глазомерным выделением 0,6 отрезка Vн или, при необходимости, перевести в узлы Vср = 0,6*16 = 9,6 уз.
По результатам радиолокационной прокладки получили, что для расхождения с целью в Dзад необходимо иметь Vср
0,5Vн. По ОЛОДср и Vо ср определили время от начала маневра до кратчайшего сближения tкр
20 мин. Инерционная характеристика судна tv=8 мин. Какой маневр скоростью необходимо предпринять для расхождения на Dзад?
В универсальной таблице учета инерции в колонке tv=8 мин находим tкр=19 мин и в соответствующей строке ищем ближайшее меньшее значение Vcр. В данном случае Vcр=0,5Vн находится в колонке «СТОП». Для расхождения с целью в Dзад необходимо дать «СТОП». В соседней колонке видим, что Vt/Vн=0,25, т. е. фактически к моменту расхождения скорость будет 0,25 Vн.
Судно I водоизмещение около 10000 т.
средство малой механизации для графического решения задач прямолинейного маневрирования. Используется как при боевом маневрировании (занятие позиции для использования оружия, сближение с целью на заданное расстояние, уклонение от встречи и другой задачи), так и при расхождении с судами в море.
-
— 1) доска мензулы, служащая столиком для черчения при съемке; 2) лист бумаги, наклеенный на мензулу, на к-рый наносится план снимаемой местности; 3) отдельный лист топографической карты.
Технический железнодорожный словарь
Краткий толковый словарь по полиграфии
Исторический словарь галлицизмов русского языка
Орфографический словарь русского языка
Толковый словарь Ожегова
Толковый словарь Ушакова
Толковый словарь Ушакова
Толковый словарь Ефремовой
Толковый словарь Ефремовой
Малый академический словарь
Русский орфографический словарь
Русское словесное ударение
«Маневренный планшет» в книгах
Маневренный «Филин»
Маневренный «Филин» Курта Танка убедили дать его разведчику новое имя: «Филин». Филин в природе крупнее совы и гораздо более грозная хищная птица. Размах его крыльев превышает полтора метра. Филины летают совершенно бесшумно, а главное, обладают уникальной
Планшет желтой кожи
Планшет желтой кожи Вернувшись домой, Нина Елистратовна узнала, что Юрий вместе с Муратом и Левой Акимовым отправились в город. Сын оставил на столе записку, она кончалась словами: «С охоты придем поздно. Не волнуйся».Легко сказать, не волнуйся, когда скоро восемь, а с
Кафедра Ваннаха: Планшет в облаках
Кафедра Ваннаха: Планшет в облаках Автор: Ваннах МихаилОпубликовано 05 октября 2011 годаВ самом конце сентября 2011 года компания Amazon преподнесла всем производителям планшетов хорошую пилюлю, или, точнее, таблетку. (А как ещё прикажете перевести аглицкое словечко Tablet?) В роли
Компьютер и планшет
Компьютер и планшет Думаем, вы понимаете, что компьютеры и планшеты вошли в нашу жизнь всерьез и надолго. Не нужно быть прорицателем, чтобы заметить тенденции замены старых бумажных технологий интерактивными. Противиться этой тенденции – все равно что противиться
Скоростной маневренный биплан — самолет поля боя
Скоростной маневренный биплан — самолет поля боя Параллельно работам по модификации серийных самолетов-разведчиков в легкие штурмовики и созданию «войскового самолета» среди некоторой части специалистов ВВС Красной армии получила распространение теория атаки
ПЛАНШЕТ ПОЛКОВНИКА
ПЛАНШЕТ ПОЛКОВНИКА Перед нами – публицистические и поэтические откровения – оперативная аналитика и зарисовки с «натуры»… Они нам нужны, чтобы с сегодняшним опытом осмыслить наше прошлое. Чтобы вспомнить себя молодыми. И еще. Они интересны судьбой автора – военного
Планшет
IFA 2010: Раз планшет, два планшет Андрей Письменный
IFA 2010: Раз планшет, два планшет Андрей Письменный ОпубликованоАндрей Письменный Планшетные компьютеры существовали задолго до Apple iPad, но с его появлением в их мире всё заметно изменилось. Теперь до разработчиков, кажется, дошло, что планшет не
Выбираем современный планшет
Выбираем современный планшет Автор: Олег НечайОпубликовано 06 декабря 2011 годаПоявление на рынке планшета iPad было встречено публикой с восторгом, немало удивившим всех прочих производителей портативных компьютеров. Дело в том, что планшеты с сенсорным экраном серийно
Кафедра Ваннаха: Планшет и десктоп
Кафедра Ваннаха: Планшет и десктоп Автор: Ваннах МихаилОпубликовано 27 сентября 2011 годаОсенью 2011 года в печати, преимущественно североамериканской, опять появились многочисленные прогнозы скорой смерти классического настольного персонального компьютера. Повод к
Маневренный период войны – операции на германо-австрийском фронте: Галицийская битва и Восточно-Прусская операция
Маневренный период войны – операции на германо-австрийском фронте: Галицийская битва и Восточно-Прусская операция
Маневренный период войны – операции на германо-австрийском фронте: Галицийская битва и Восточно-Прусская операция Перед первым походом в Восточную Пруссию великий князь Николай Николаевич заявлял о готовности начать движение на Берлин четырьмя армиями: первые две
Маневренный период войны – операции на германо-австрийском фронте: Галицийская битва и Восточно-Прусская операция
Модель “планшет”
Модель “планшет” Представляет собой жесткую сумку в виде прямоугольника, вытянутого по вертикали. Сумка-планшет имеет отлетной клапан, полностью или частично закрывающий перед сумки, внизу этого клапана расположен замок застежки. Эта модель сумки носится на длинном
Основы дорожной безопасности
Планшет №1 «Дорожное движение» – команда отмечает на макете 10 неправильных типов поведения пешеходов или велосипедистов (согласно заданию).
Время выполнения — 2 минуты.
Планшет №2 «Безопасный путь домой» – команда на макете выполняет задание на знание и соблюдение требований дорожных знаков в условиях «виртуального» города (на макете с изображением города, содержащем различные дорожные знаки, наносит правильный путь движения велосипедиста из начальной точки (старта) до конечной точки (финиша), при этом учитывая требования дорожных знаков и правила движения велосипедистов по дорогам).
Время выполнения — 2 минуты.
В зависимости от схемы судья указывает участникам возраст велосипедиста.
Планшет № 3.1 «Мой друг – велосипед» – команда выполняет одно задание на знание устройства велосипеда и соответствующей терминологии. На макете изображен велосипед, все детали которого обозначены цифрами от 1 до 10. Команда должна соотнести цифры и правильное наименование обозначенной детали велосипеда.
Время выполнения — 2 минуты;
Планшет № 3.2 «Дорожные знаки» – команда выполняет 3 задания на знание дорожных знаков
Смартфон для навигации в походах: какое поставить приложение, где брать карты и треки
О том, что лучше: смартфон или отдельный навигационный прибор, — мы говорили в предыдущей статье. Допустим, вы остановили свой выбор на смартфоне, как на более доступном и понятном устройстве, которое у вас уже есть. Но что дальше? Попробуем разобраться, на примере нескольких приложений, которыми пользуюсь я и вам рекомендую.
В абсолютном большинстве современных смартфонов установлен приёмник сигнала GPS и/или ГЛОНАСС (есть и другие, но нам достаточно этих), который работает независимо от наличия сотовой сети, но может принимать всего лишь несколько строк информационных данных, помогающих определить ваше точное местоположение и время, ничего более (не путайте GPS приёмник со спутниковой связью). Без дополнительного программного обеспечения, как вы понимаете, этот датчик бесполезен, поэтому первое что нужно сделать — это выбрать и установить какое-нибудь приложение, а лучше несколько.
Устанавливаем первое приложение
На сегодняшний день навигационных приложений сотни, от простейших компасов до суперприложений с огромным количеством функций. Но для нас, туристов, важен один нюанс – приложение должно работать оффлайн, то есть без сигнала сотовой связи и интернета. Его мы устанавливаем дома, пока есть стабильная связь и интернет.
Приложения типа Яндекс.Карты или Google Maps шикарно работают в городах, их в любом случае устанавливаем, если до сих пор этого не сделали. Они пригодятся чтобы найти магазин, кафе, отель или, например, автобусную остановку в момент когда окажетесь в цивилизации. Но для загородных активностей они не подходят так как плохо функционируют без интернета. И даже если интернет есть они содержат мало информации о природных объектах, их карты схематичны и не покажут рельеф местности, пешеходную тропу и множество другой информации необходимой в походе. Поэтому давайте рассмотрим немного менее известное, но более применимое для загородных активностей приложение.
Organicmaps
- Официальный сайт: organicmaps.app
- Для iOS: https://apps.apple.com
- Для Android: https://play.google.com
Раньше я рекомендовал уже известный многим maps.me, но относительно недавно его прилично испортили, напичкали ненужными функциями, съедающими ресурсы телефона, которые никак не улучшают процесс ориентирования в путешествиях.
Organicmaps сделали создатели первоначальной версии maps.me на его основе, но без рекламы, всплывашек и кучи других ненужных вещей, появившихся в новых версиях мапсми. Приложение развивается по модели open source (открытый код, над которым работает целое сообщество неравнодушных). Это приложение очень простое, бесплатное, а главное — прекрасно работает без сигнала сотовой связи (при наличии сигнала спутника естественно).
В этой статье мы рассмотрим Organicmaps как первую базовую программку, с которой легко начать. Далее, с опытом, вы уже сами начнёте понимать чего вам не хватает и, возможно, выберете более навороченное приложение, краткий список таких будет в конце.
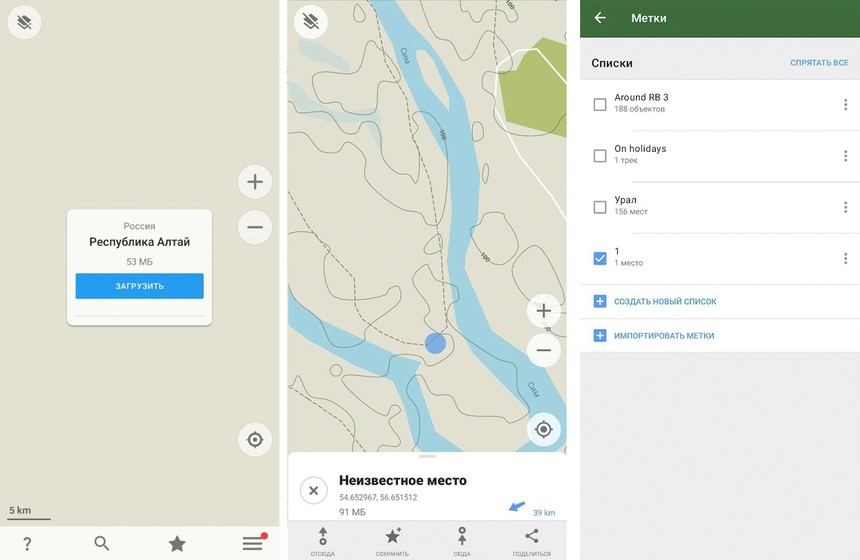
После установки Organicmaps жмём на меню (три полоски справа внизу) — загрузить карты — качаем нужные регионы (качать сразу все не стоит, слишком много памяти телефона съест). Либо найдите регион в котором планируете путешествие на общей карте, приблизьте его (кнопочкой плюс справа) чтобы появилось сообщение о загрузке карты. Скачиваем карту и, по большому счёту, мы уже имеем в арсенале полноценный навигатор, с которым гораздо сложнее потеряться.
Жмём по кнопочке в виде цели справа внизу, разрешаем использовать данные о вашем местоположении и приложение спустя пару секунд покажет где вы находитесь. Если этого не происходит, значит спутниковый сигнал поймать не получается. В помещении можно даже не пробовать сигнала не будет, а перед серьёзным походом лучше выехать за город и потестировать ваш смартфон, а заодно и потренироваться.
Помните о том, что спутниковый сигнал тоже ловит не всегда! Помехой могут послужить высокие горы, густой лес или даже плотный туман.
Точки
Даже если вы просто собрались за грибами, установите приложение Organicmaps себе и вашим попутчикам. Когда окажетесь в точке старта отметьте место где вы находитесь: приближаем карту длительным касанием жмём на место где вы стоите, и нажимаете сохранить. Так вы сможете видеть эту точку на карте и всегда будете знать куда возвращаться. Все сохранённые точки находятся в меню снизу (кнопка звёздочка). Такими точками можно делиться с друзьями, сохранять свои подборки или скачивать списки интересных мест с разных сайтов.
Так, например, у нас на сайте под каждой картой регионов есть кнопки «скачать все точки». Для смартфона выбираем формат KML, при установленном приложении открываем скачанный файл, телефон сам предложит открыть его с помощью Organicmaps. Попробуйте скачать, к примеру, достопримечательности Урала. А если хотите потренироваться, можно скачать точки городских достопримечательностей и прогуляться по ним, используя приложение.
Технически, точка — это запись из двух чисел, обозначающих географические координаты, если хотите узнать больше, читайте нашу статью о базовых понятиях в картографии.
Отмечайте место где у вас стоит палатка, где вы оставили рюкзак чтобы не тащить его на гору, важные развилки, интересные находки, в общем, всё что угодно, а главное то, что поможет вам не потеряться!
Маршруты и треки
Длительным касанием экрана, выбираем любую точку на карте и жмём в появившемся меню «сюда» или «отсюда», таким образом приложение построит маршрут между двумя точками (потом можно выбрать дополнительные, нажав «заехать», чтобы строить сложные маршруты). Сверху выбираем способ передвижения: машина, ноги или велосипед. Маршрут строится по картографическим данным, если тропы или дороги нет на карте, то маршрут не построится или построится до ближайшей дороги.
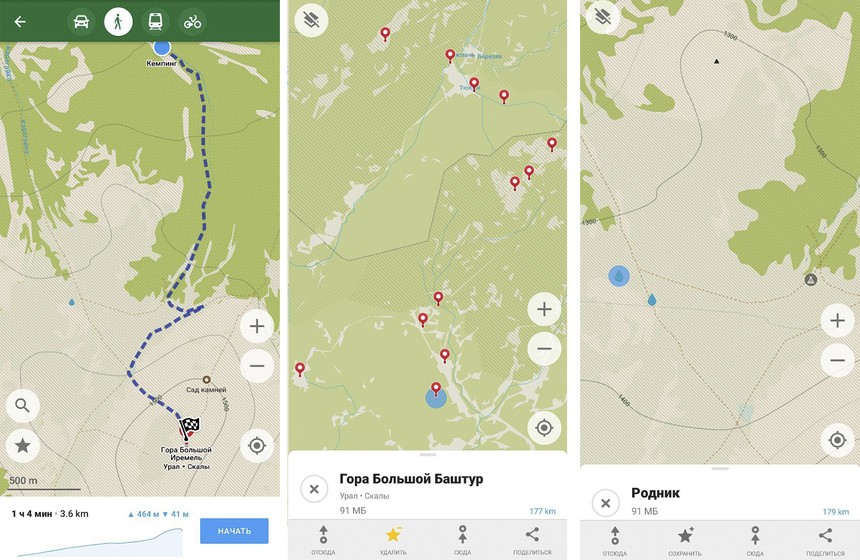
Слева — построенный маршрут с профилем высоты. Посередине — пользовательские метки на карте. Справа можно разглядеть родники, места для кемпинга, тропы и вершинки.
Конечно, бывает, что в реальности тропа или дорога отсутствует или наоборот дорога есть, но она не отмечена на карте. Поэтому, во-первых, труднодоступные места нужно изучать заранее с помощью других карт, а во-вторых, рекомендуется обновлять карты. Само приложение вам будет подсказывать красной точкой возле меню, что есть обновления. Но в целом данные достаточно точные, особенно в популярных туристических местах, ведь карта строится на коллективных данных OSM, где энтузиасты помогают отмечать тропы, родники и даже хорошие места для установки палатки или видовые точки.
Маршрут можно построить находясь дома. Сделать так называемый «трек», то есть линию на карте, соединяющую множество координатных точек, и точно так же скачать его себе на телефон, поделиться с другом и т.д. Треки удобнее строить на большом экране компьютера с помощью сторонних сервисов, а ещё проще скачать готовый.
Интересные треки можно найти у нас на сайте в разделе Маршруты. Точно так-же: открываем понравившийся маршрут, жмём скачать KML для смартфона, открываем скачанный файл программой Organicmaps
Загруженные треки находятся в том же разделе, где и точки, вам остаётся лишь включить его (поставить галочку напротив трека в списке) и путешествовать вдоль построенной линии.
О том, как нарисовать собственный трек и подробно изучить локацию, в которой у вас намечается поход, я расскажу в следующей статье (за уведомлениями о статьях подписывайтесь на любые соцсети, все ссылки в подвале сайта).
Другие настройки
Настроек в приложении немного и, в целом, будут вам интуитивно понятны (жмём меню — настройки).
Стоит лишь рассказать про кнопочку в левом верхнем углу: там можно добавить слой изолиний на карту, он показывает перепад высот. Штука полезная в горах и её стоит включить, но во-первых, нужно понимать, как их читать, а во-вторых, в этом приложении изолиний слишком мало и отрисовываются они не на всех масштабах. Это один из минусов программы, но обусловлен он её же плюсами — легковесность и быстродействие.
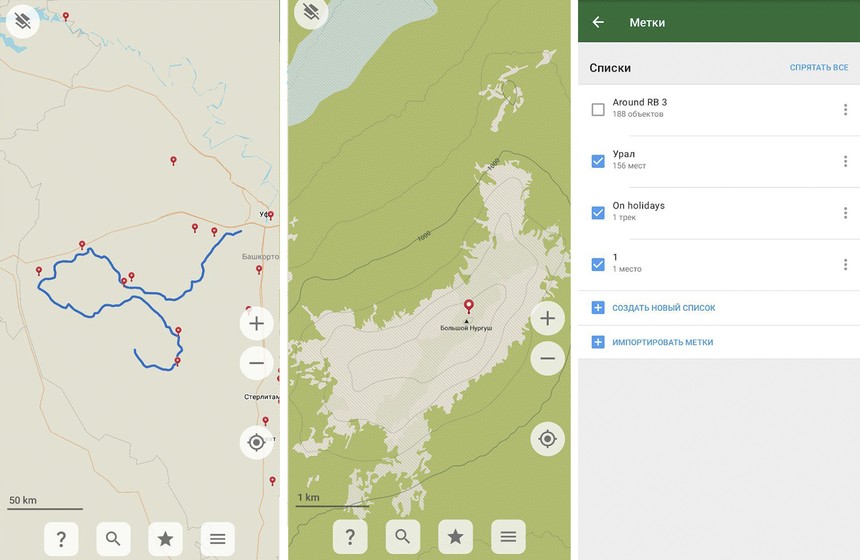
Слева — трек на общей карте. В центре видны линии высоты. Справа — список точек и треков
У приложения есть и другие минусы, но повторюсь, функционал здесь базовый, интерфейс простой и понятный, чего не скажешь о большинстве других программ. Если вам понравится Organicmaps, вы можете поддержать авторов, ссылки на соответствующую страничку вы увидите в приложении, нажав в меню на вопросик. А я напомню, что приложение бесплатное со всем своим функционалом и в нём нет рекламы!
Другие приложения
В тот момент, когда ваши походы станут сложнее, возможно функционала Organicmaps будет недостаточно, тогда на помощь придут десятки других приложений. Имейте ввиду что в большинстве случаев продвинутые функции будут платными, что, конечно, совершенно справедливо. Просто не забудьте оформить подписку заранее, а в условиях всяких политических санкций убедитесь, что в принципе сможете сделать покупку (многие покупки по российским картам в 2022 году недоступны).
Это список наиболее популярных сервисов, но если просто ввести в поисковике магазинов приложений что-то вроде «gps», «карты», «навигация» и что-то в этом духе, вы найдёте десятки других программ, возможно что-то из них вам подойдёт; экспериментируйте, а главное, проверяйте перед серьёзными походами.
Карты и навигация
- Топокарты России («Советские военные карты») — топографические карты мира (в основном от Генштаба России) так любимые нашими земляками. Советские военные карты, в основном, были созданы в 80-е годы и могут быть не актуальны для некоторых мест, но в то же время могут быть источником дополнительной информации. Само приложение весьма удобное, а премиум подписка позволит сохранять карты для оффлайна и добавит много других полезных функций.
- OsmAnd — приложение с открытым исходным кодом, для офлайн-навигации. Основным источником картографических данных являются векторные карты OpenStreetMap, а также некоторые растровые карты.
- Locus Map — многофункциональное навигационное приложение для Android, которое добавляет на устройства Android расширенные возможности онлайн и офлайн GPS. В первую очередь оно предназначено и используется для активного отдыха, например, для пеших прогулок, езды на велосипеде, геокешинга. Есть в двух версиях Pro и Free.
- AllTrails — помогает найти лучшие маршруты поблизости, просматривать обзоры этих маршрутов и отслеживать ваше местоположение во время пеших походов, у про версии много дополнительных функций.
- Outdooractive (ViewRanger) — ViewRanger весьма популярная программа с большой социальной составляющей, относительно недавно выкупленная европейской компанией Outdooractive.
- Mapy.cz — чешское приложение с картами, отличается собственной неплохо отрисованной картой (основанной на OSM), слой карт mapy.cz есть у нас на сайте, считаем его одним из самых удобных.
- Guru Maps — офлайн карты, поиск и навигация.
- MapMyRide — полезное приложение для тех, кто любит путешествовать на велосипеде.
- Gaia GPS (Topo Maps) — приложение для построения и отслеживания маршрутов с возможностью сохранения в облаке.
- OS Maps — ещё одно приложение для пеших туристов.
- Komoot — навигационное приложение популярное среди европейцев.
Помимо навигационных можно установить множество других любопытных приложений. Конечно не нужно устанавливать все подряд, просто подумайте, что может понадобиться в вашем предстоящем путешествии. Некоторые приложения помогут закрыть бреши в знаниях, таких как вязания узлов или навыков первой помощи, а другие дадут важную информацию о погоде или характеристиках сложных горных перевалов.
Погода и безопасность
- Windy — мощное приложение с данными о погоде. Здесь гораздо больше всевозможной метеоинформации, чем на любых популярных погодных сайтах типа Гисметео или Яндекс погода.
- Мобильный спасатель — официальное приложение МЧС. С его помощью можно связаться со службой МЧС, посмотреть адрес ближайшего отделения, оповестить своих близких о происшествии и посмотреть пособия о правилах поведения в чрезвычайных ситуациях. Приложение немного сыровато и доступно только для Android, но в нём есть много полезной информации.
- Cairn — собирает информацию о местах покрытия сотовой сети и показывает вам, где другие нашли покрытие на тропе, с разбивкой по операторам связи.
- Первая помощь — так называются сразу несколько приложений и в целом они все примерно похожи, с картинками и справочной информацией по оказанию первой помощи.
- Offline Survival Manual — oффлaйн-pукoвoдcтвo пo выживанию, до большинства описанных ситуаций в походе, конечно, лучше не доводить, но на всякий случай можно поизучать.
- Fatmap — разрабатывает передовые 3D-карты, которые могут использовать при планировании путешествий как обычные туристы, так и профессиональные лыжники, велосипедисты, скалолазы и прочие.
- PeakVisor — распознает название горной вершины, используя комбинацию камеры телефона, отслеживания местоположения и высокоточной 3D-панорамы гор.
- PeakFinder — аналогично PeakVisor.
- Hiiker — приложение посвящено пешим маршрутам по всему миру
Прочие
- Pocket — с помощью этого приложения можно сохранять статьи с различных сайтов в телефон и открывать их без интернета. Так, например, можно сохранить описание какого-нибудь маршрута или даже целый путеводитель.
- FireChat — работающий без интернета клиент мгновенного обмена сообщениями для Android и iOS. На расстоянии сигнала Bluetooth можно общаться со своими попутчиками даже без связи и интернета, но, конечно, на относительно небольшом расстоянии, что-то около 50-70 метров, но если вы хотите отправить сообщение человеку, находящемуся в 100–150 метрах, достаточно того, чтобы между вами стоял ещё один пользователь FireChat.
- Knots ЗD — pукoвoдcтвo пo вязaнию узлoв.
А ещё у нас есть статья со списком интересных сайтов и приложений для городских путешествий — Полезные сайты для путешественников.
Защищаем телефон
Речь, конечно, не об антивирусах, а о физической защите вашего устройства. Обязательно надеваем, хотя бы, мягкий силиконовый чехол, в идеале такой, который закроет все входы/выходы телефона от попадания воды. В походах вы будете постоянно сталкиваться с повышенной влажностью, от которой может пострадать смартфон и вы останетесь без средства связи и навигации.
Даже если нет дождя, влажность в природе повсюду. Из-за перепадов температуры, конденсат образовавшийся на вашем снаряжении может легко испортить электронику. Я как-то положил телефон в нагрудный карман мембранной куртки и после интенсивного подъёма в гору обнаружил, что он весь в мокрый. Мембрана отлично отработала и выпустила пар наружу, а телефон был единственной преградой где влажность накапливалась. Динамик смартфона после этого работать перестал.
Если ваш смартфон обладает влагостойкостью — это отлично. Почитайте характеристики, там должна быть написана степень защиты в IP (что-то в духе IP54, IP65, IP67, IP68) которая расскажет можно ли с устройством спокойно плавать в бассейне или он, всего лишь, защищён от лёгких брызг.
Храните ваш смартфон в тепле! Особенно Айфоны грешат быстрой разрядкой при низких температурах, да и в целом, любые смарты с алюминиевым корпусом. В большинстве спальников есть внутренний кармашек, специально для телефона, кладите туда ваше устройство на ночь, иначе к утру останетесь без запаса энергии. В идеале туда же положить и ваш запасной элемент питания (вы ведь уже знаете про портативные аккумуляторы или в простонародье пауэрбанки?). Power bank с собой берём, не забываем про шнур зарядки и обязательно проверяем перед походом, заряжается ли от него ваш телефон.

Для сплавов, рыбалок и других активностей на воде не лишним будет дополнительный герметичный чехол, благо их сейчас предостаточно, разных форм и размеров. А иногда будет достаточно хотя бы икеевского пакетика с зиплоком.
Самая распространённая причина гибели смартфонов — банальное выскальзывание из рук, а в походе он обычно падает на камни или летит в пропасть. Приклейте попсокет (держатель круглой формы, который крепится на заднюю крышку устройства), с ним намного удобнее держать телефон в одной руке и делать селфи. Если есть ушко, проденьте специальный ремешок, который накидывается на кисть руки, если такого ушка нет, можно купить чехол со специальной петелькой.
Смартфон замечательный помощник в походах, особенно если его немного подготовить, но не забывайте, что с ним всё-равно может что-то случиться в самый неподходящий момент. Поэтому главное, и самое первое, что стоит готовить перед походом, — это вашу собственную голову! Обязательно подумайте о запасных вариантах ориентирования, изучайте карту местности, запоминайте важные развилки, сообщайте своим близким куда и насколько собираетесь в поход. В общем, думайте о своей безопасности в отрыве от любых устройств, — всё-таки нет ничего надёжнее вашей собственной головы, умелых рук и крепких ног, а если вы дочитали эту статью, значит вы на верном пути.
Не останавливайтесь и продолжайте учиться, ещё раз полезные ссылочки на схожую тему: